
An Educational Platform for Real-Time Control and Reinforcement
Learning Experiments Using Rotary Inverted Pendulum and LW-RCP
Doyoon Ju
a
, Jongbeom Lee
b
and Young Sam Lee
c
Department of Electrical and Computer Engineering, Inha University, Incheon, Korea
Keywords:
Control Engineering Education, LW-RCP, Stepper Motor Vector Control, Real-Time Control.
Abstract:
This paper presents an integrated experimental platform for hands-on education in control engineering, built
around a compact rotary inverted pendulum system based on a stepper motor and a Simulink-based Light
Weight Rapid Control Prototyping (LW-RCP) environment. The proposed platform supports real-time imple-
mentation of a wide range of control experiments, including current-based vector control, nonlinear swing-up
control, linear stabilization, and reinforcement learning-based control. The hardware consists of a rotary
inverted pendulum made with 3D-printed components and a hollow-shaft stepper motor, incorporating a com-
pact inverter realized through an L6234 motor driver. Its compact and lightweight design allows for tabletop
experimentation, enabling one-device-per-student operation and enhancing scalability in education. On the
software side, users can design controllers and collect real-time data through Simulink’s block-based modeling
interface without coding. Moreover, Python integration enables sim-to-real experiments with reinforcement
learning controllers. This platform complements traditional theory-centric control engineering education by
offering rich hands-on experiences, thereby increasing student motivation and fostering a deeper conceptual
understanding through the full process of controller design and system response analysis.
1 INTRODUCTION
Control engineering has long been a fundamental dis-
cipline in engineering education, traditionally focus-
ing on theory-oriented curricula such as mathemat-
ical modeling of systems, frequency response anal-
ysis, and controller design using state-space meth-
ods. These conventional approaches often rely on
simulation environments to help students understand
controller behavior indirectly. However, in mod-
ern industrial applications, engineers are expected to
possess practical capabilities to control complex and
nonlinear systems in real-time (Iqbal et al., 2017;
Faulwasser et al., 2017; Han and Qiao, 2014). Fields
such as drones, autonomous vehicles, and indus-
trial robotics demand not only theoretical knowledge
but also the ability to implement controllers that ac-
count for real-world constraints. Consequently, the
direction of engineering education has been shift-
ing from passive theoretical instruction to hands-
on, experiment-driven learning, where students ac-
a
https://orcid.org/0000-0001-7011-6779
b
https://orcid.org/0009-0004-8289-8092
c
https://orcid.org/0000-0003-0665-1464
tively design controllers and validate their perfor-
mance through experiments (Lei et al., 2022; Framing
et al., 2020; Precup et al., 2011).
However, to effectively implement hands-on edu-
cation in real-world control engineering classrooms,
it is essential to provide students with a hardware-
based experimental environment that enables direct
physical interaction with control targets. Despite
its importance, the widespread adoption of such en-
vironments is hindered by the high cost of exper-
imental equipment and limited infrastructure. For
instance, some universities utilize advanced instruc-
tional systems such as the Rotary Inverted Pendulum
from Quanser (Quanser Consulting Inc., 1990) or the
MicroAutoBox from dSPACE (dSPACE Inc., 1991),
but these systems entail high financial costs—often
ranging from thousands to tens of thousands of dol-
lars—as well as operational complexity and spatial
constraints, limiting their scalability and accessibil-
ity in educational contexts. Rapid Control Proto-
typing (RCP) has already been actively employed in
fields such as mechatronics (Deppe et al., 2004; Is-
ermann, 2008), automotive dynamics control (Lee
et al., 2004), and precision motion control (Hercog
and Jezernik, 2005; Bodo et al., 2024), where it has
274
Ju, D., Lee, J. and Lee, Y. S.
An Educational Platform for Real-Time Control and Reinforcement Learning Experiments Using Rotary Inverted Pendulum and LW-RCP.
DOI: 10.5220/0013740000003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 274-281
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

demonstrated high effectiveness in rapid controller
design and iterative testing using real hardware sys-
tems. Although this methodology has clear poten-
tial for educational applications, the high entry bar-
riers associated with conventional educational plat-
forms have prevented its widespread adoption in aca-
demic settings. As a result, many students are limited
to simulation-based learning or passive observation
of instructor-led demonstrations, thereby missing the
opportunity to experience real-time controller imple-
mentation and feedback-driven design processes first-
hand.
To address these limitations, this paper proposes
an integrated educational platform consisting of a
compact rotary inverted pendulum system driven
by a stepper motor and a Simulink-based Light
Weight Rapid Control Prototyping (LW-RCP) envi-
ronment (Lee et al., 2017). The hardware configura-
tion includes a hollow-shaft stepper motor, an L6234
three-phase inverter circuit, a pendulum sensor, and
an analog current sensor, all assembled using cost-
effective 3D printing techniques. The stepper motor
exhibits synchronous motor characteristics, making
it suitable for experimental learning in various con-
trol techniques such as current regulation, vector con-
trol, and PWM-based speed control. The pendulum’s
sensor data is transmitted through a slip ring passing
through the central axis of the motor. Owing to its
compact and lightweight design, the system can be
operated independently on a tabletop, enabling a one-
device-per-student setup. This facilitates an accessi-
ble and scalable experimental environment, thereby
offering a practical alternative to cost-intensive edu-
cational solutions.
In addition, on the software side, the Simulink-
based LW-RCP environment allows users to de-
sign and execute control algorithms in real time
using a block diagram approach without requiring
complex programming. The system supports high-
frequency control loops operating at approximately
2 kHz and integrates essential real-time functionali-
ties such as PWM generation, current feedback, and
velocity response measurement into modular blocks.
This enables users to intuitively construct control
loops, perform parameter tuning, and visualize sys-
tem responses in real time. Furthermore, integration
with Python allows the deployment of reinforcement
learning-based controllers in sim-to-real experiments.
As a result, the platform extends its instructional
scope beyond traditional control theory to include
cutting-edge AI-based control strategies. Ultimately,
this integrated framework enables students to engage
in the complete cycle of control system design, imple-
mentation, and evaluation, fostering deeper concep-
tual understanding and enhancing motivation through
hands-on learning in control engineering.
This paper systematically describes the design
principles and overall system architecture of the pro-
posed control education platform and evaluates its
educational effectiveness and practical learning out-
comes through a set of representative experiments.
Section 2 discusses the hardware structure of the ro-
tary inverted pendulum system based on a stepper mo-
tor, including mechanical design elements and essen-
tial techniques for implementing current and vector
control. Section 3 elaborates on the software aspects
of the Simulink-based LW-RCP environment, such
as control loop design, real-time data acquisition,
and Python integration. Section 4 presents two ma-
jor experimental applications conducted on the pro-
posed platform:(1) energy-based swing-up followed
by LQR stabilization using vector control, and (2)
swing-up control of the rotary inverted pendulum us-
ing a reinforcement learning controller trained via a
sim-to-real approach. These experiments demonstrate
the platform’s practicality and expandability in sup-
porting both classical and modern control strategies.
Finally, Section 5 summarizes the educational signifi-
cance and current limitations of the platform, and dis-
cusses its potential applications and future directions
in control engineering education.
2 DESIGN AND EDUCATIONAL
FEATURES OF A ROTARY
INVERTED PENDULUM
SYSTEM USING A STEPPER
MOTOR
To simultaneously achieve hardware simplicity and
scalability for educational use, the proposed platform
is built around a stepper motor-based rotary inverted
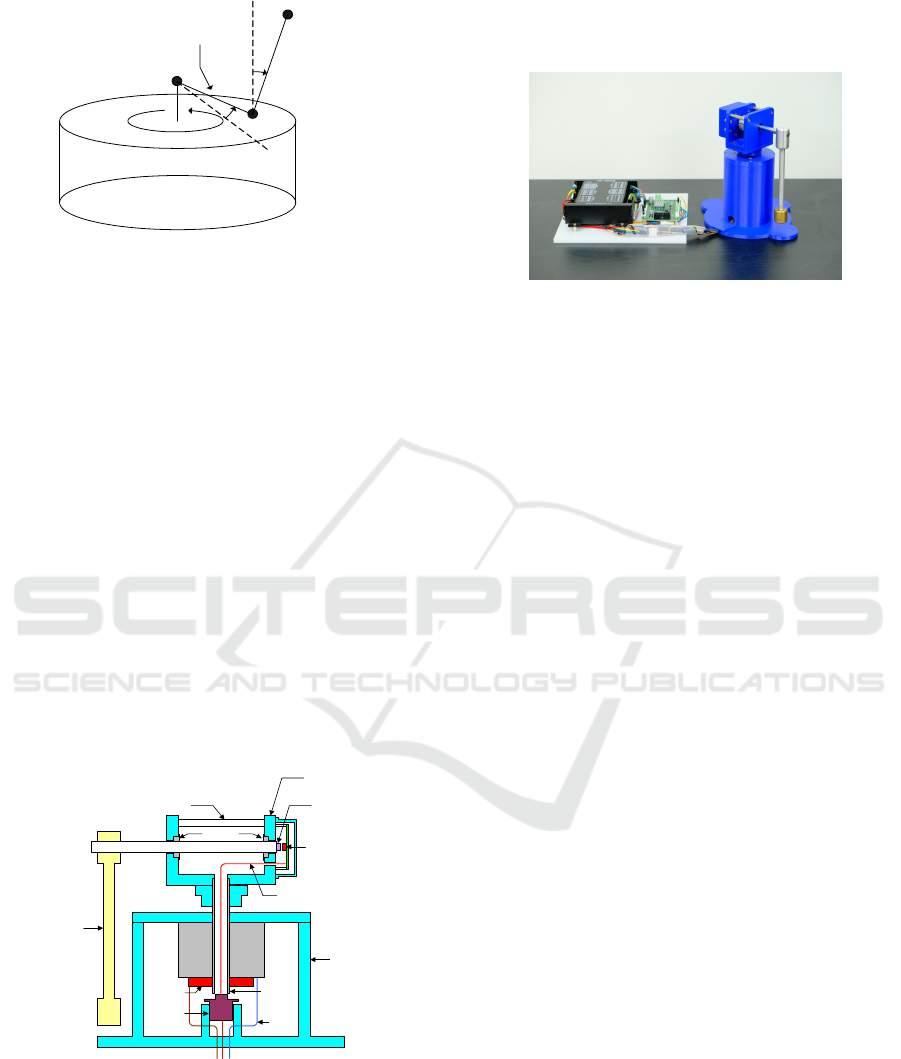
pendulum system. Figure 1 illustrates a conceptual
diagram of the system, designed to provide an intu-
itive understanding of its operating principle. The
complete hardware setup consists of a 3D-printed
frame, a hollow-shaft stepper motor, a three-phase in-
verter based on the L6234 driver, and a single-board
microcontroller serving as the control interface. The
platform is compact and lightweight enough for table-
top use, and all components can be easily sourced
from standard electronics markets. Furthermore, the
total cost remains within an affordable range of sev-
eral tens of thousands of Korean won, making it fea-
sible to implement one-device-per-student configura-
tions for hands-on control education.
The rotary inverted pendulum typically requires
An Educational Platform for Real-Time Control and Reinforcement Learning Experiments Using Rotary Inverted Pendulum and LW-RCP
275
Arm
pendulum
α
θ
r
0θ =
0α =
Figure 1: Conceptual diagram of the rotary inverted pendu-
lum system.
one motor for arm rotation and two encoders to mea-
sure the angular positions of both the arm and the pen-
dulum rod. Additionally, a slip ring is commonly re-
quired to enable unlimited rotation. However, apply-
ing such a configuration to a compact platform often
leads to increased mechanical complexity and higher
component costs. To address this issue, this study pro-
poses a hardware structure centered around a hollow-
shaft stepper motor. This type of motor offers high de-
sign flexibility for rotary experimental setups such as
inverted pendulums, allowing the pendulum rod to be
directly mounted through the motor’s central shaft. A
slip ring can be integrated within the shaft to securely
transmit sensor signals that capture the pendulum’s
angular motion. This design effectively minimizes
potential hardware failures during experiments, such
as cable twisting, signal loss due to poor contact, and
sensor noise. Furthermore, it simplifies maintenance.
Figure 2 illustrates the structural concept of the rotary
inverted pendulum reflecting this design approach.
bearing
pendulum
slip ring
step
motor
encoder cable
magnet
magnetic
encoder IC
3D-printed
mechanical part
hollow
shaft
motor
cable
PCB support
arm
capacitive
encoder
Figure 2: Conceptual structural diagram of the proposed
rotary inverted pendulum.
The actual appearance of the fabricated rotary in-
verted pendulum is presented in Fig.3, where the
overall structure and design features for miniaturiza-
tion of the proposed system can be intuitively ob-
served. The pendulum unit is approximately 17cm
in height and 7 cm in width, and the base has been
designed with a wider footprint to ensure stability
against reaction torques.
Figure 3: A rotary inverted pendulum constructed in the
laboratory.
The stepper motor is typically operated in an
open-loop configuration; however, in this system, pre-
cise control of the phase currents enables the experi-
mental implementation of various closed-loop strate-
gies such as vector control, current control, and
PWM-based speed control. This is based on the the-
oretical interpretation of the stepper motor as a syn-
chronous motor, thereby providing a pedagogical en-
vironment in which students can experiment with and
compare different control techniques on a physical
system.
One of the most valuable educational features of
the stepper motor is its ability to visualize the relation-
ship between control inputs and physical responses in
an intuitive manner. The one-to-one correspondence
between pulse count and angular displacement, as
well as the linear relationship between current com-
mands and torque generation, enables a foundational
understanding of system response. Through position
and speed control experiments, students can directly
observe the effects of control algorithms in real-time,
facilitating a shift from theoretical modeling to prac-
tical system understanding. This structural and func-
tional simplicity lowers the entry barrier for beginners
while offering a scalable experimental platform for
advanced learners to explore complex control strate-
gies.
Furthermore, the system is also well-suited for
experiments in system modeling and parameter es-
timation. Electrical parameters of the motor (e.g.,
resistance and inductance) and mechanical param-
eters (e.g., inertia and friction coefficients) can be
empirically identified from experimental data. This
supports white-box modeling approaches that foster
deeper physical understanding of control systems and
meet the goals of practice-oriented education. Un-
like black-box approaches, this integration of exper-
iment and modeling reinforces students’ insight into
the physical structure of the system.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
276
In summary, the proposed platform provides a
compact, simplified, and cost-effective hardware ar-
chitecture that fulfills key practical requirements in
control engineering education without reliance on ex-
pensive laboratory equipment. It enables learners to
engage directly with core concepts such as actuator
control, system identification, and feedback design,
thus creating a unified educational framework that
bridges theory, practice, design, and application.
3 REAL-TIME CONTROLLER
IMPLEMENTATION USING
LW-RCP
Traditional methods of real-time controller develop-
ment require implementing control algorithms in C
on a microcontroller and manually configuring hard-
ware components such as PWM, ADC, timers, and in-
terrupts. This workflow demands advanced program-
ming skills and often distracts learners from the core
principles of control design, redirecting their focus
toward low-level debugging and peripheral handling.
In educational settings where the objective is to link
theoretical knowledge to practical systems, such com-
plexity can become a barrier to effective learning. To
address these issues, this study introduces a Simulink-
based Light Weight Rapid Control Prototyping (LW-
RCP) environment, integrated with a rotary inverted
pendulum system. The environment enables intuitive
and iterative hands-on real-time control experiments
without requiring low-level coding. LW-RCP, devel-
oped in-house, allows users to construct control sys-
tems graphically using block diagrams while seam-
lessly interfacing with the hardware.
This environment has been successfully applied in
various experimental control tasks, including the con-
trol of a rotary double inverted pendulum using direct
collocation, and sim-to-real reinforcement learning
experiments on a linear double pendulum system (Lee
et al., 2025; Ju et al., 2025).
The control loop constructed in Simulink com-
municates in real-time with the LW-RCP hardware
via USB, supporting a high-frequency control rate
of up to 2 kHz. Since the stepper motor used in
the rotary inverted pendulum can be interpreted as
a synchronous motor, each phase current can be
precisely regulated to implement advanced control
strategies such as vector control, current control,
and PWM-based speed control. This enables stu-
dents to go beyond simple position control and intu-
itively learn current-based vector control architectures
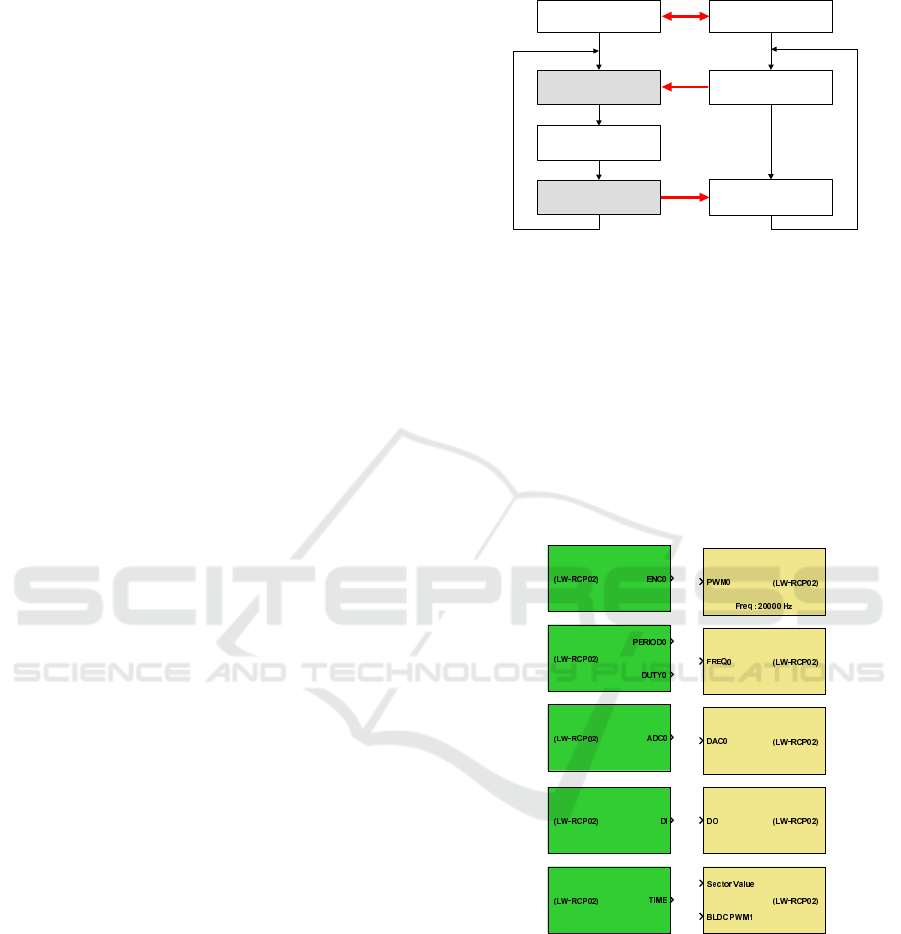
widely adopted in industrial systems. Figure 5 illus-
Initialization Initialization
Receive sensor data from
the LW-RCP unit
Compute control data
based on received
sensor data
Measure sensor data and
transmit it to Simulink (PC)
Loop
PC (Simulink)
LW RCP Unit
(ATSAM3X8E)
USB
USB
USB
Loop
Send computed control data
to the LW-RCP unit
Apply received control data
to output peripherals
Figure 4: Real-time execution and hardware interaction pro-
cess in LW-RCP.
trates an example configuration of core blocks pro-
vided in the LW-RCP environment. Students can eas-
ily construct position and velocity feedback loops us-
ing blocks such as ENC, PWM, and FREQ, and con-
duct experiments by assigning reference inputs via
analog channels while observing system responses in
real time. Additionally, Figure 6 presents the inte-
grated hardware setup, where the LW-RCP control
board and motor driver circuit are mounted together
on a single platform.
Figure 5: Simulink blocks for I/O and real-time control in
LW-RCP.
The real-time control experiments enabled by LW-
RCP significantly broaden the scope of control the-
ory application and offer structured opportunities for
comparative learning of diverse control strategies.
First, through vector control experiments with stepper
motors, students can learn how torque is generated
from current references to drive the pendulum arm
precisely. TThis fosters an intuitive understanding
of how current, speed, and position are linked within
the feedback loop. Second, swing-up and stabiliza-
An Educational Platform for Real-Time Control and Reinforcement Learning Experiments Using Rotary Inverted Pendulum and LW-RCP
277
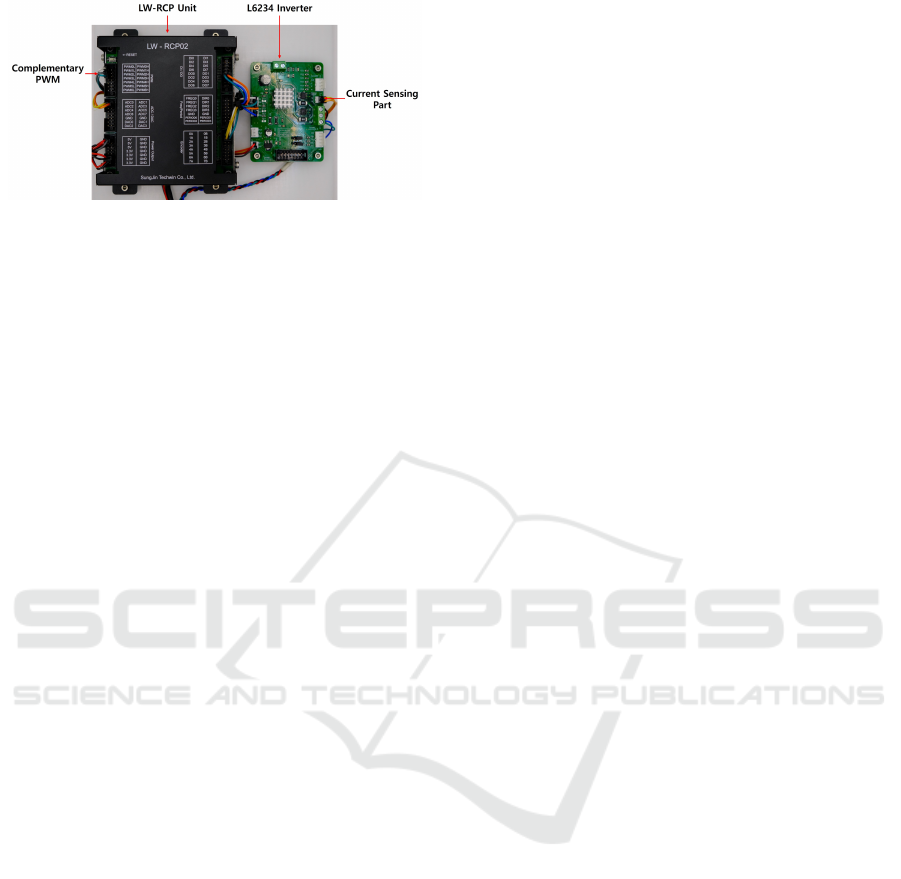
Figure 6: Control board integrating LW-RCP and motor
driver.
tion control experiments allow learners to implement
and compare nonlinear energy-based controllers and
linear LQR-based stabilizers, as well as reinforce-
ment learning (RL) control policies. Simulink’s S-
Function and Stateflow tools enable students to con-
struct condition-based switching logics with block-
based modeling. Third, the platform supports model-
based control design. Electrical parameters (e.g.,
resistance, inductance) and mechanical parameters
(e.g., inertia, friction) of the motor can be estimated
from real experimental data and incorporated into dy-
namic models for designing state-space controllers.
This approach goes beyond black-box modeling to
cultivate white-box modeling and control synthesis
skills. Finally, Python integration allows sim-to-real
experimentation, where RL policies trained in simula-
tion can be transferred to physical systems. This pro-
vides hands-on exposure to both classical and mod-
ern AI-based control strategies and allows students
to evaluate the feasibility and limitations of neural-
network-based control in real-time environments.
Ultimately, LW-RCP functions not merely as an
experimental tool but as a practical medium for con-
trol engineering education. When combined with
the proposed rotary inverted pendulum system, it en-
ables repetitive, individual experimentation and fos-
ters autonomous learning of the entire feedback pro-
cess: controller design, implementation, verifica-
tion, tuning, and response analysis. This hands-on
setup bridges the gap between theory and practice
by addressing real-time system behavior and hard-
ware responsiveness—key elements often overlooked
in simulation-centric curricula.
4 VECTOR-CONTROL-BASED
EXPERIMENTS WITH A
ROTARY INVERTED
PENDULUM
This section presents three representative control ex-
periments conducted using the proposed experimental
platform to validate the connection between control
theory and real-world implementation and to demon-
strate its effectiveness in practice-based education.
All experiments were implemented in real-time us-
ing the Simulink-based LW-RCP environment. The
hardware platform consisted of a stepper motor-based
rotary inverted pendulum system, an L6234 inverter,
current sensors, and an analog input interface. The ex-
periments focused on the following two strategies:(1)
energy-based swing-up using vector control for speed
regulation, and (2) sim-to-real application of a rein-
forcement learning-based controller.
In the first experiment, a vector-control-based
speed controller was implemented for the stepper mo-
tor driving the arm of the rotary inverted pendulum,
and this controller was used to realize an energy-
based swing-up control strategy. The stepper motor
was modeled as a synchronous motor, and the current
references generated in the d-q coordinate frame were
transformed via a Park transformation and modulated
using space vector pulse width modulation (SVPWM)
before being transmitted to the L6234 motor driver.
Closed-loop control was achieved through real-time
current feedback (Yang et al., 2003). The entire con-
trol algorithm was implemented in Simulink using
block diagrams, with a control cycle set to 2 kHz.
Figure 7 illustrates the Simulink implementation of
the speed controller, and Figure 8 shows the SVPWM
modulation and signal output structure. The swing-
up control strategy was based on the energy-shaping
method proposed by
˚
Astr
¨
om and Furuta (
˚
Astr
¨
om and
Furuta, 2000), which gradually increases the pendu-
lum’s kinetic energy until it reaches a critical thresh-
old. The controller estimates the current energy of the
pendulum using its position and velocity, then adjusts
the control input to compensate for the energy gap
relative to the reference value. Figure 9 presents the
structure of this energy-based control algorithm and
visualizes the measured pendulum angle and veloc-
ity response. The experiment showed that the pendu-
lum, starting from a downward-hanging position, ac-
cumulated energy through successive motor actions,
reached the required energy level, and successfully
transitioned to the upright position. Afterward, the
control was switched to a Linear Quadratic Regula-
tor (LQR) based on a linearized state-space model,
and the pendulum maintained its upright equilibrium
reliably. This experiment allows students to experi-
ence the integrated process of applying both nonlin-
ear energy-based and linear state-space-based control
strategies to a real-time system, thereby bridging the
gap between theoretical understanding and practical
implementation.
The second experiment involves a sim-to-real
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
278
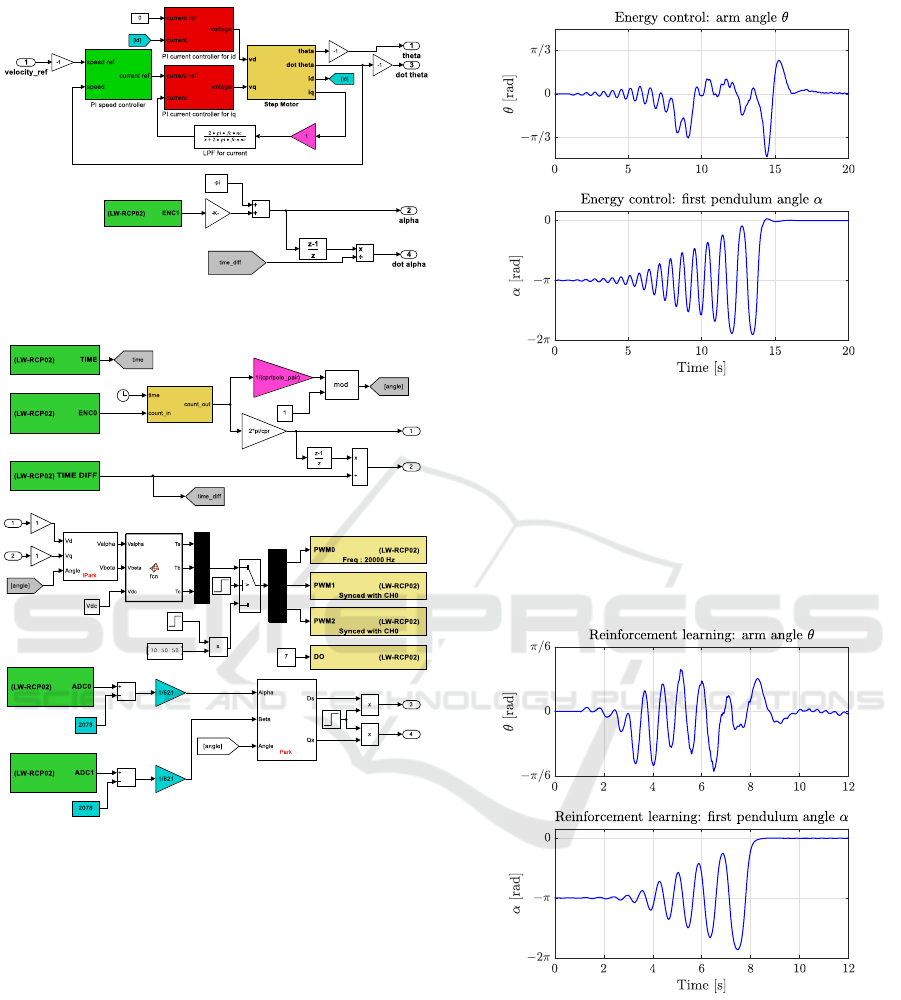
Figure 7: Simulink model of vector-control-based speed
controller for swing-up energy control.
Figure 8: SVPWM generation block diagram converting
dq-axis current commands.
transfer of a reinforcement learning (RL) policy
trained in a Python environment to a real-world con-
trol platform. An agent trained using the Truncated
Quantile Critics (TQC) algorithm (Kuznetsov et al.,
2020) in a Python-based simulation was exported and
deployed on the physical system. Real-time control
commands were transmitted to the LW-RCP hardware
via MATLAB Simulink, enabling the learned policy
to operate the platform. The system receives torque
and pendulum angle measurements as input and ap-
plies the RL model’s output as PWM signals to the
hardware. To minimize the sim-to-real transfer gap,
physical factors such as friction and sensor noise were
incorporated into the simulation model. Experimental
results confirmed that the trained policy successfully
executed both swing-up and balance control on the
Figure 9: Experimental results of energy-based swing-up
control.
real system. Specifically, the controller gradually in-
creased the pendulum’s energy and then stabilized it
at the upright position by damping oscillations near
the equilibrium. The control behavior is visualized
in Figure 10, offering learners a direct and quantita-
tive understanding of the gap between theoretical RL-
based control and its real-world deployment.
Figure 10: Execution of swing-up and stabilization tasks
using a TQC-trained reinforcement learning.
Through the above experiments, it was verified
that the proposed platform provides an environment
capable of implementing and comparing a wide range
of control strategies in real time—from classical vec-
tor control-based speed control and mathematically
designed optimal control to data-driven reinforcement
learning approaches. This integration of control the-
ory with physical systems allows learners to validate
An Educational Platform for Real-Time Control and Reinforcement Learning Experiments Using Rotary Inverted Pendulum and LW-RCP
279

the effectiveness of each strategy through experimen-
tation and develop practical intuition for controller
design. In particular, by experiencing the perfor-
mance differences and implementation constraints of
each control method firsthand, the platform demon-
strates its potential to realize an experiment-centered
educational environment that goes beyond traditional
simulation-based learning.
5 CONCLUSION
This paper proposed a hands-on educational plat-
form for control engineering that integrates a stepper-
motor-based rotary inverted pendulum system with a
Simulink-based Light Weight Rapid Control Proto-
typing (LW-RCP) environment. The proposed plat-
form was validated through experiments that demon-
strated both its design principles and educational ef-
fectiveness. By incorporating a hollow-shaft step-
per motor, a low-cost L6234 motor driver, and a 3D-
printed frame, the platform offers an affordable, com-
pact, and scalable hardware solution. All compo-
nents are easily obtainable from commercial markets,
and the system is designed to support one-device-per-
student deployment for large-scale classroom use.
On the hardware side, interpreting the stepper mo-
tor as a synchronous motor allows students to engage
in advanced control practices such as current and vec-
tor control, extending their learning beyond basic po-
sition control toward current-based strategies used in
industrial systems. Coupled with the Simulink-based
LW-RCP environment, students can visually imple-
ment real-time controllers without writing code, per-
form parameter tuning, and analyze system responses
in a fully autonomous manner. Moreover, Python
integration enables sim-to-real transfer of reinforce-
ment learning (RL) policies, offering intuitive and
hands-on experiences with modern AI-based control
techniques.
Experimental demonstrations included vector-
control-based swing-up, LQR-based stabilization,
and RL-based policy control, highlighting the plat-
form’s versatility in supporting diverse control strate-
gies. These experiments allowed learners to compare
different approaches under realistic constraints and to
gain a deeper understanding of real-time control im-
plementation. The integration of both classical and
modern methods creates a meaningful bridge between
theoretical concepts and practical execution.
Most importantly, the platform’s educational sig-
nificance lies in enabling students to experience the
full process of controller design, system implementa-
tion, real-time experimentation, and data-driven anal-
ysis. This end-to-end learning cycle not only rein-
forces motivation but also helps translate abstract the-
ory into real-world applications. It serves as an effec-
tive path toward fostering practical control engineer-
ing skills and can be regarded as a valuable example
of hands-on engineering education.
Future work may extend the platform into remote
laboratories and modular kits applicable to various
physical systems. Control engineering education is
expected to evolve into a more intuitive and person-
alized direction with such platforms, contributing sig-
nificantly to the realization of a learner-centered edu-
cational paradigm that integrates theory, practice, de-
sign, and implementation.
ACKNOWLEDGEMENTS
This work was supported by the National Research
Foundation of Korea(NRF) grant funded by the Korea
government(MSIT)(RS-2024-00347193).
REFERENCES
˚
Astr
¨
om, K. J. and Furuta, K. (2000). Swinging up a pendu-
lum by energy control. Automatica, 36(2):287–295.
Bodo, G., Tessari, F., Buccelli, S., and Laffranchi, M.
(2024). A rapid control prototyping and hardware-in-
the loop approach for upper limb robotic exoskeletons
control. Applied Sciences, 14(5).
Deppe, M., Zanella, M., Robrecht, M., and Hardt, W.
(2004). Rapid prototyping of real-time control laws
for complex mechatronic systems: A case study. Jour-
nal of Systems and Software, 70(3):263–274.
dSPACE Inc. (1991). dspace official home page.
www.dspace.com. Accessed: 7 June 2025.
Faulwasser, T., Weber, T., Zometa, P., and Findeisen, R.
(2017). Implementation of nonlinear model predic-
tive path-following control for an industrial robot.
IEEE Transactions on Control Systems Technology,
25(4):1505–1511.
Framing, C.-E., Hedinger, R., Iglesias, E. S., Heßeler, F.-
J., and Abel, D. (2020). Edubal: An open balancing
robot platform for teaching control and system theory.
IFAC-PapersOnLine, 53(2):17168–17173.
Han, H. and Qiao, J. (2014). Nonlinear model-predictive
control for industrial processes: An application to
wastewater treatment process. IEEE Transactions on
Industrial Electronics, 61(4):1970–1982.
Hercog, D. and Jezernik, K. (2005). Rapid control proto-
typing using matlab/simulink and a dsp-based motor
controller. International Journal of Engineering Edu-
cation, 21(3):1–9.
Iqbal, J., Ullah, M., Khan, S. G., Khelifa, B., and
´
Cukovi
´
c,
S. (2017). Nonlinear control systems - a brief
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
280

overview of historical and recent advances. Nonlin-
ear Engineering, 6(4):301–312.
Isermann, R. (2008). Innovative products with embedded
control. Control Engineering Practice, 16(1):14–29.
Ju, D., Lee, T., and Lee, Y. S. (2025). Transition control of
a rotary double inverted pendulum using direct collo-
cation. Mathematics, 13(4).
Kuznetsov, A., Shvechikov, P., Grishin, A., and Vetrov, D.
(2020). Controlling overestimation bias with trun-
cated mixture of continuous distributional quantile
critics. In Proceedings of the 37th International Con-
ference on Machine Learning, volume 119, pages
5556–5566.
Lee, T., Ju, D., and Lee, Y. S. (2025). Transition control
of a double-inverted pendulum system using sim2real
reinforcement learning. Machines, 13(3).
Lee, W., Shin, M., and Sunwoo, M. (2004). Target-identical
rapid control prototyping platform for model-based
engine control. Proceedings of the Institution of Me-
chanical Engineers, Part D: Journal of Automobile
Engineering, 218(7):755–765.
Lee, Y. S., Jo, B., and Han, S. (2017). A light-weight rapid
control prototyping system based on open source
hardware. IEEE Access, 5(1):11118–11130.
Lei, Z., Zhou, H., Hu, W., and Liu, G.-P. (2022). Unified
and flexible online experimental framework for con-
trol engineering education. IEEE Transactions on In-
dustrial Electronics, 69(1):835–844.
Precup, R.-E., Preitl, S., Radac, M.-B., Petriu, E. M.,
Dragos, C.-A., and Tar, J. K. (2011). Experiment-
based teaching in advanced control engineering. IEEE
Transactions on Education, 54(3):345–355.
Quanser Consulting Inc. (1990). Quanser official home
page. www.quanser.com. Accessed: 7 June 2025.
Yang, S.-M., Lin, F.-C., and Chen, M.-C. (2003). Control
of a two-phase linear stepping motor with three-phase
voltage source inverter. In IEEE International Electric
Machines and Drives Conference, 2003. IEMDC’03.,
volume 3, pages 1720–1725.
An Educational Platform for Real-Time Control and Reinforcement Learning Experiments Using Rotary Inverted Pendulum and LW-RCP
281
