
CSDF-by-SIREN: Learning Signed Distances in the Configuration Space
Through Sinusoidal Representation Networks
Christoforos Vlachos
a
and Konstantinos Moustakas
b
Department of Electrical and Computer Engineering, University of Patras, 26504 Rion-Patras, Greece
Keywords:
Configuration Space Signed Distance Function (CSDF), Sinusoidal Representation Networks (SIREN), Neu-
ral Implicit Representation, Robot Configuration Space, Signed Distance Function (SDF), Inverse Kinematics.
Abstract:
Signed Distance Functions (SDFs) are used in many fields of research. In robotics, many common tasks,
such as motion planning and collision avoidance use distance queries extensively and, as a result, SDFs have
been integrated widely in such tasks, fulfilling even the tightest speed requirements. At the same time, the
idea of the more natural representation of distances directly in the configuration space (C-space) has been
gaining ground, resulting in many interesting publications in the last few years. In this work, we aim to define
a C-space Signed Distance Function (CSDF) in a way that parallels other SDF definitions. Additionally,
coupled with recent advancements in machine learning and neural representation of implicit functions, we
attempt to create a neural approximation of the CSDF in a way that is fast and accurate. To validate our
contributions, we construct an experiment environment to test the accuracy of our proposed workflow in an
inverse kinematics contact test. Comparing these results to the performance of another published approach to
the neural implicit representation of distances in the Configuration Space, we found that our method offers a
considerable improvement, reducing the measured errors and increasing the success rate.
1 INTRODUCTION
Among the many fields of robotics, the concept of
distance has always played a critical role in the way
a robot interprets and interacts with its environment.
Whether it is used as a measurement of separation be-
tween points, obstacles, or a robot’s end effector and
its target location, it provides valuable information for
many common tasks.
Specifically regarding the field of robotics, Signed
Distance Functions (SDFs) have been studied exten-
sively and are well-incorporated in many manipula-
tion, control, and optimization tasks. A lot of op-
erations in robotics often need to transition between
representing quantities in task-space or configuration-
space (often abbreviated to “C-space”). As such, rep-
resentations of the SDF in C-space by transforming
the task-space are often used.
A different approach which, among many advan-
tages, fits well in multiple common robotics work-
flows, is the definition of a distance function directly
in the C-space. This function may be used instead of
a
https://orcid.org/0000-0003-2863-7823
b
https://orcid.org/0000-0001-7617-227X
the transformed task-space SDF in order to intuitively
and robustly represent the angular distance between a
robotic arm and some point in the C-space.
The learning of implicit functions has been a focal
point in many publications during the last years, ex-
hibiting remarkable results (Park et al., 2019; Milden-
hall et al., 2020; Mescheder et al., 2019). Natu-
rally, SDFs have played a major role in this oppor-
tune occasion, with many researchers opting to use
this form of implicit representation as an alternative to
explicit mesh representation, featuring important ad-
vantages (Gropp et al., 2020; Hao et al., 2020; Yariv
et al., 2021). And while neural networks for learn-
ing SDFs in the convenience of readily defined Eu-
clidean spaces have been well investigated, learning
such functions directly in a robot’s C-space is a rela-
tively immature and largely uncharted subject.
Code and pretrained models of this work may be
found in the following repository: https://github.com/
ChristoforosVlachos/CSDF.git
82
Vlachos, C. and Moustakas, K.
CSDF-by-SIREN: Learning Signed Distances in the Configuration Space Through Sinusoidal Representation Networks.
DOI: 10.5220/0013736900003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 82-90
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

2 RELATED WORK
2.1 Implicit Representation
Although a very traditional technique, the explicit
representation of surfaces has been questioned numer-
ous times as a choice for a lot of applications. This is
especially true when we are interested in representing
continuous surfaces where a discretization of space
may prove detrimental to the task. As such, level set
methods surfaced very early on (Osher and Fedkiw,
2003; Breen and Whitaker, 1999; Bloomenthal and
Bajaj, 1997) to apply implicit functions to the com-
mon task of surface representation in fluid dynamics,
modeling, as well as motion planning and robotics
jobs.
2.2 Neural Implicit Representation
Amid neural methods becoming mainstream, implicit
representations turned to leverage the neural research
that was quickly becoming the status quo. Thus, many
researchers were now using deep learning in order to
accurately and efficiently approximate continuous im-
plicit functions. As far as radiance fields go, NeRFs
as introduced by Mildenhall et al. (Mildenhall et al.,
2020) went on to become complete game-changers,
whereas Mescheder et al. promoted occupancy fields
for 3D shape representation (Mescheder et al., 2019).
Signed Distance Fields and Signed Distance Func-
tions played a major role in neural implicit represen-
tation. The first major work to introduce neural SDFs
for implicitly representing 3D shapes was Park et al.’s
DeepSDF in 2019 (Park et al., 2019), competing with
Mescheder et al.’s Occupancy Networks (Mescheder
et al., 2019). Other works soon followed to improve
upon those initial concepts (Gropp et al., 2020; Or-
tiz et al., 2022), with Sitzmann et al.’s noteworthy re-
search in the use of periodic activation functions in
place of other nonlinearities to very accurately rep-
resent continuous functions (Sitzmann et al., 2020).
Those networks were nicknamed SIRENs (Sinusoidal
Representation Networks) and provide the technical
basis of our proposed workflow.
2.3 Signed Distance Functions in
Robotics
The concept of Signed Distance Functions was
brought over to robotics, as it seemed a natural fit for
common tasks, such as collision detection/avoidance
and motion planning. Ratliff et al. (Ratliff et al., 2015)
were among the first to use the notion of a distance
function that is negative inside an object and positive
outside to encode obstacles for motion planning in
2015. Liu et al. (Liu et al., 2022) later extended SDF-
based representations with deep learning, a concept
which led Ortiz et al. (Ortiz et al., 2022) to develop
iSDF, a real-time neural SDF approach, enabling the
use of SDFs in dynamically changing environments.
2.4 C-Space Distance Functions
While SDFs usually operate in the robot’s workspace,
an extension to this notion has been presented in the
literature that aims to express distance functions di-
rectly in the C-space, where robot motion is naturally
defined. Recent work by Li et al. (Li et al., 2024a)
formalized the (unsigned) Configuration space Dis-
tance Field (CDF) and used them in various applica-
tions such as inverse kinematics and motion planning.
Doing the required computations analytically though
is quite expensive.
To combat this problem, Koptev et al. (Koptev
et al., 2023) had earlier focused and experimented on
a neural representation of signed distance functions
for articulated robots. Inspired by this work, Li et
al. (Li et al., 2024a) also propose a neural extension of
their work, named the “neural-CDF” (since our work
also focuses on a neural approach, we will often omit
that part and refer to it simply as “CDF”).
3 MOTIVATION –
CONTRIBUTIONS
In the rest of this paper, we will cover a mathemat-
ical definition of a Configuration Space Signed Dis-
tance Function, a complete methodology for obtain-
ing a robust neural approximation of such a function,
as well as rigorous validation and comparison in stan-
dard robotics workflows. Our work aims to fill exist-
ing gaps in research, hoping to serve this innovative
field of research.
Concisely, our contribution focuses on the follow-
ing items:
• formalize the definition of a Configuration Space
Signed Distance Function (CSDF) as a mathemat-
ical quantity and fit it inside the distance functions
spectrum.
• define a methodology to enable the creation of a
neural structure to obtain the CSDF quickly and
accurately. Similar structures have yet to be de-
ployed and examined in such high dimensional
environments.
• improve upon existing relevant solutions in terms
of speed, memory requirements, and fidelity.
CSDF-by-SIREN: Learning Signed Distances in the Configuration Space Through Sinusoidal Representation Networks
83

4 METHODS
4.1 Background
A distance function is usually defined as a scalar func-
tion f (x) that represents the (minimum) distance be-
tween point x and a second object. This definition
holds, even when x ∈ R
n
and n > 3.
In the case of the SDF, φ(x), it is commonly ex-
pressed as:
φ(x) =
0 , x ∈ ∂Ω
d(x), x ∈ Ω
+
−d(x), x ∈ Ω
−
, (1)
where Ω ⊆ R
n
and ∂Ω represents an airtight boundary
iso-surface splitting Ω into Ω
+
(the part of the space
outside the iso-surface) and Ω
−
(the part of the space
enclosed by the iso-surface). d(x) then represents the
distance between x and the nearest point of ∂Ω. The
negative sign is given to Ω
−
by convention.
While the concept of the SDF is often seen and
used in a multitude of manners and in various prob-
lems of robotics, a new form of distance functions, the
C-space Distance Functions, is gaining ground. Even
though our human intuition processes perfectly Eu-
clidean robot workspaces well, to a robot the (usually
non-Euclidean) C-space is a much more intuitive en-
vironment where its operations can be defined easily,
even naturally. To this extent, the collection of dis-
tance functions may be broadened to contain
φ
c
(x) =
0 , x ∈ ∂Ω
c
d
c
(x), x ∈ Ω
+
c
−d
c
(x), x ∈ Ω
−
c
, (2)
where d
c
represents distance in C-space, which may
be geodesic, angular, or a combination of the two.
Here ∂Ω
c
is, again, a boundary surface splitting Ω
c
into an outside region Ω
+
c
and an inside region Ω
−
c
.
Ω
c
may be chosen to be a subset of the C-space or it
may not; this detail is heavily influenced by the con-
ditions of the relevant task.
It should be emphasized that Equation 2 is no dif-
ferent than Equation 1. It is only a specific case ex-
pressed formulaically for clarity. This is in contrast to
simply applying a transformation to an existing SDF
defined in the robot’s workspace to be expressed in
the domain of its C-space, as is very well demon-
strated in (Li et al., 2024a). Moreover, the CSDF is
similarly distinct from its unsigned counterpart intro-
duced in the same work in that a CSDF is not merely a
sub-category of SDF – it is an SDF, defined in a space
where distance is measured geodesically.
One more point of note is that, when talking in
terms of the CSDF (or, likewise, the SDF) of a robot,
this function is modified as the robot navigates its
workspace. Therefore, we should rewrite the CSDF
in the form φ
c
(p, q), expressing it relative to both the
query point p ∈ R
n
and the robot’s current configura-
tion q ∈ R
m
, with n representing the dimensionality
of the workspace (normally, 2 or 3) and m being the
number of Degrees-of-Freedom of the robot in use.
With our proposed approach, the neural repre-
sentation of the CSDF φ
c
(p, q) is equivalent to the
representation of the distance function φ
c
(x), when
x = [p, q] and x ∈ R
(n+m)
(in other words, here we set
Ω
c
⊆ R
(n+m)
). This approach exposes the problem of
the CSDF representation to be completely analogous
to that of representing any SDF of possibly high di-
mensionality n + m – and it should be treated as such.
4.2 Neural Implicit Representation
We are interested in obtaining an approximation of
φ
c
(p, q), which we call
b
φ
c
(p, q), by neural network.
There are many possibilities for the choice of archi-
tecture that have appeared in literature (Park et al.,
2019; Gropp et al., 2020), each with their own ad-
vantages, prevalent features, and areas of expertise.
One specific architecture, namely the Sinusoidal Rep-
resentation Network (SIREN) (Sitzmann et al., 2020),
has demonstrated great results in the representation
of continuous signals (including SDFs) (Vlachos and
Moustakas, 2024) and appears very well suited for the
task at hand.
SIRENs, to be concise, are comprised of a few
fully connected NN layers. They differ from usual
MLPs in that they employ sinusoidal activation func-
tions instead of opting for the usual nonlinearities
(ReLU, tanh, etc.). While their usefulness has been
demonstrated in tasks of generally low dimensional-
ity, they are yet to be tested in high dimensionality
problems, as is the approximation of the CSDF.
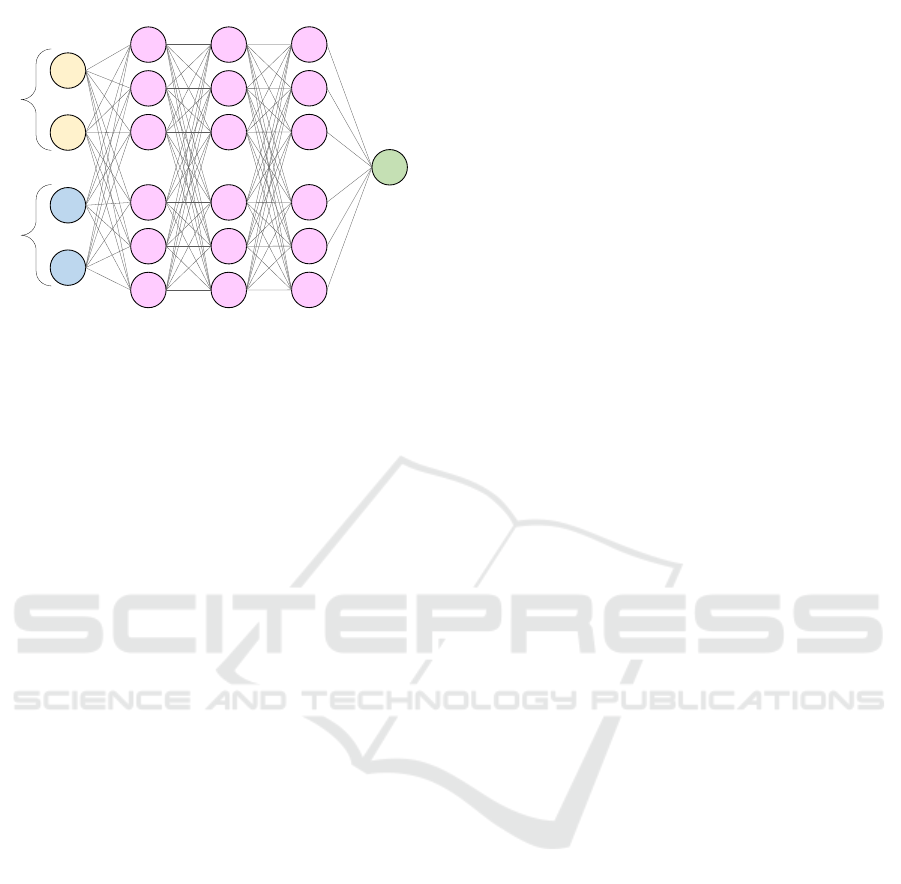
We constructed a SIREN consisting of 1 input, 1
output, and 3 hidden layers. This distribution of layers
is common in literature and usually obtained the best
results in our own testing. The input layer consists of
(n + m) neurons to input the query point p ∈ R
n
and
current robot configuration q ∈ R
m
, while the output
layer contains only a single neuron to output the value
of the predicted CSDF,
b
φ
c
(p, q). Different amounts of
neurons for the hidden layers were investigated. Two
variants are showcased here, one with 512 neurons per
hidden layer, and a lighter one, with 256 neurons per
hidden layer. The architecture of our proposed SIREN
solution can be examined in Figure 1.
To aid the SIREN in its difficult task of approxi-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
84
.
.
.
.
.
.
.
.
.
SDF
query coordinates
3 hidden layers
.
.
.
.
.
.
robot configuration
Figure 1: The architecture of our proposed SIREN for a qual-
ity approximate representation of the C-Space Signed Dis-
tance Function (CSDF).
mating the CSDF, an appropriate loss function must
be deployed. Based on previously published litera-
ture of similar tasks (Li et al., 2024a; Sitzmann et al.,
2020), we constructed the following loss function:
L
csd f
= w
1
Z
Ω
c
∥|∇
q
b
φ
c
(p, q)| − 1∥dx
+ w
2
Z
Ω
c
(1 − ⟨∇
q
b
φ
c
(p, q), ∇
q
φ
c
(p, q)⟩)dx
+ w
3
Z
Ω
c
|
b
φ
c
(p, q) − φ
c
(p, q)|dx
+ w
4
Z
Ω
c
∥∇
2
q
b
φ
c
(p, q)∥
2
dx
(3)
In Equation 3, the first integral enforces the, so
called, eikonal equation on the entire space Ω
c
. Be-
ing a distance function, for the CSDF it is fundamen-
tal that ∥∇
x
φ
c
(x)∥ = 1 almost everywhere (except for
a few degenerate points (Osher and Fedkiw, 2003)).
The second integral is a classic cosine similarity loss
which ensures that the predicted CSDF has a similar
direction with the ground-truth CSDF.
The third integral is a direct comparison of the pre-
dicted function to the ground-truth values. There is
a key distinction between this term and the one sug-
gested by (Li et al., 2024a): instead of minimizing
distance errors using the L2 norm, we use the L1
norm (absolute difference). This subtle change leads
to improved accuracy and stability, preventing exces-
sive error penalization and ensuring smoother conver-
gence. In high-dimensional C-space representations,
our approach mitigates the disproportionate influence
of large errors seen with L2-based losses, resulting in
a more precise CSDF approximation.
A fourth integral may be optionally added in order
to curb the second-order derivatives of the predicted
function, maintaining smooth changes. We identified
this term as a viable regularization option by our own
ablation experiments and observed a measurable im-
provement when using it.
Studying the proposed loss function, since the sec-
ond and third integral terms require knowledge of the
ground truth CSDF, φ
c
(p, q), it is immediately evi-
dent that the calculation of the ground truth CSDF, at
least for select samples to be used as input data will
be unavoidable. For lower dimensionality distance
functions, we might have evaded using different loss
terms that do not require knowledge of the ground-
truth CSDF, leveraging insightful heuristics, similar
to (Sitzmann et al., 2020). Here, such a simplification
is likely not possible. In the following experiments,
the weights of the individual loss terms were set to
w
1
= 0.01, w
2
= 0.1, w
3
= 5.0, and w
4
= 0.01, as
per the existing literature (Li et al., 2024a). These
ensure a good match with the available ground truth
data, while also using less enforced terms to assist in
regularization.
5 EXPERIMENTS
To assess the performance of our proposed solution,
both in terms of accuracy and speed, we simulated
an environment where a single 7-DoF Franka Emika
robotic arm was tasked to make contact with one spe-
cific point in the robot’s 3D task space.
As ground truth data, we followed the dataset gen-
eration instructions in (Li et al., 2024a). They were
obtained by creating a sampling grid of dimensions
20×20×20 from the robot’s workspace and, through
optimization techniques, finding the configurations q
′
that satisfy φ(p, q
′
) = 0 for each point p in the grid.
φ(p, q) represents the SDF model of the robot i.e., a
function that is able to represent the signed distance
of point p to the robot in configuration q. This kind of
problem has been tackled before (Koptev et al., 2023;
Liu et al., 2022). We made use of the SDF model pub-
lished in (Li et al., 2024b) in order to compete with
neural-CDF (Li et al., 2024a) in a fair manner.
As far as the implementation of the contact task is
concerned, we adopt the following process. By cal-
culating
b
φ
c
(p, q
i−1
) = d
c
at each iteration i, we deter-
mine the appropriate movement as:
∆q
i
= −
b
φ
c
(p, q
i−1
) × ∇
q
b
φ
c
(p, q
i−1
) (4)
and, consequently, q
i
= q
i−1
+ ∆q
i
. The derivative is
calculated by auto-differentiation.
If the solution works well, it is expected that q
i
would converge to a configuration q
′
with the property
that φ(p, q
′
) = 0. Therefore, after each iteration step,
φ(p, q
i
) is calculated and this function’s magnitude is
CSDF-by-SIREN: Learning Signed Distances in the Configuration Space Through Sinusoidal Representation Networks
85

regarded as error. For increased precision in testing,
we repeat this test for 1000 pairs of points p and ini-
tial configurations q
0
. As metrics, we report the mean
average error (MAE) and the root mean square error
(RMSE). The success rate (SR) is also reported as an-
other metric and is defined as the percentage of con-
figurations q
i
that were sufficiently close to the target
point p, less than 3 cm away.
6 RESULTS
Li et al. (Li et al., 2024a) have recently worked on
C-Space Distance Fields, presenting a similar method
for obtaining a neural representation of the (unsigned)
C-Space Distance Function using a simple MLP en-
hanced by positional encoding. Although our ap-
proach targets a similar representation, our individ-
ual methods differ significantly in many important
details. Thus, we consider this a suitable method to
compare our solution to, highlighting the value those
details carry.
Our proposed SIREN network consists of 3 hidden
layers of 512 neurons per layer. On the input side, the
3 cartesian coordinates of the query point are passed
to the network, along with the 7 joint angles of the
robotic arm (matching the 7 Degrees of Freedom of
the Franka Emika), giving us an input dimension of 3
+ 7 = 10.
We are also proposing and testing a lighter version
of the above SIREN (“SIREN light”), one with only
256 neurons per hidden layer. This is done in order to
push the SIREN architecture to its limit and assess its
potential.
Each network was trained for 50 000 epochs on an
AWS “g5.xlarge” instance featuring a single NVidia
A10G Tensor Core GPU with 24 GB of VRAM and
4 vCPUs on a system with 16 GB of RAM. On each
epoch, 20 000 points were sampled from the dataset,
along with 100 configurations per query point, total-
ing a batch size of 20 000 × 100.
After training, each network was tested on the
contact experiment. For each test, the number of it-
erations the network was allowed in order to manage
contact was kept fixed. The results of these experi-
ments may be found on Table 1. Reported are means
and variances of the relevant metrics obtained by re-
peating each test 100 times. A few sample iterations
may be seen rendered in Figure 2.
Looking at Table 1, we notice that the CDF ap-
proach (MLP with positional encoding) gives a poor
success rate after the first iteration, and significantly
better results afterwards, reaching its peak perfor-
mance after 5 iterations. In contrast, using our pro-
Figure 2: Four rendered frames from the contact experi-
ments. In each run, the Franka Emika robot is tasked with
making contact with a specific point inside its task space (a
small, colored sphere is used to represent said point) but has
only a set amount of C-space moves to get there. It is ob-
served and validated that contact is apparently achieved.
posed SIREN, we achieve adequate results after the
first iteration already. By the second iteration, we
have honed the success rate to 93.8%, 2% better than
CDF ever managed. At the third iteration, the suc-
cess rate rises to its peak: 95.4%. Even our proposed
“SIREN light” variant hits consistently lower errors
and a higher success rate than CDF.
SIRENS are known for converging very fast and
with little data to an accurate solution. In order to
let our approach truly demonstrate its potential, we
chose to repeat the experiment, this time training each
network on a way smaller batch size of 10 points ×
100 configurations, for 50 000 epochs too. Then, a
repeat of the contact task was performed, providing
the results of Table 2.
This time, we notice that the CDF method fails
to produce decent results, struggling to reach a 78%
success rate even after 5 iterations. On the other
hand, our proposed SIREN for approximating the
CSDF achieves great results after only 2 iterations.
With further adjustment iterations, the success rate
reaches 90.7%. The “SIREN light” follows the same
story, trailing closely behind “SIREN” and managing
a plateau of 90% success rate.
Another dimension of the problem, which we have
yet to discuss is the offline training time of each rep-
resentation, as well as the number of trainable param-
eters, which directly influences the memory require-
ments. For the experiments that were performed, a
collection of these measurements can be seen on Ta-
ble 3. It should be noted that all the improvements that
were achieved by our method, were attained with less
training time on a representation utilizing fewer pa-
rameters. It is also worth pointing out that our testing
suggested that the large training time of the full SIREN
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
86
Table 1: Results of the contact experiment. Calculation
of the C-space distances and gradients is performed by
CDF (Li et al., 2024a), our SIREN-based approach for
CSDF, and by a lighter version of the same network. All
networks were trained on a batch size of 20000 × 100 for
50000 epochs. Results after 1, 2, 3, 4, 5, or 10 iterations
are displayed. For Mean Average Error (MAE) and Root
Mean Squared Error (RMSE), lower is better. For Success
Rate (SR), higher is better.
Projection
Iterations
CDF SIREN SIREN light
MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑ MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑ MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑
1 5.01 ± 1.87 8.62 ± 3.12 59.8 ± 12.1 4.61 ± 1.94 8.91 ± 3.75 70.2 ± 10.3 5.03 ± 2.06 9.46 ± 3.82 67.6 ± 9.8
2 1.66 ± 0.59 2.81 ± 1.19 87.5 ± 9.0 1.38 ± 0.43 2.78 ± 1.24 93.8 ± 5.6 1.46 ± 0.47 3.03 ± 1.37 93.1 ± 4.8
3 1.37 ± 0.50 2.02 ± 0.84 91.2 ± 8.6 1.17 ± 0.34 1.73 ± 0.67 95.4 ± 5.0 1.21 ± 0.37 1.79 ± 0.71 95.0 ± 5.3
4 1.37 ± 0.54 1.95 ± 0.85 91.4 ± 9.0 1.20 ± 0.38 1.61 ± 0.55 94.9 ± 6.2 1.22 ± 0.41 1.66 ± 0.71 94.6 ± 7.2
5 1.36 ± 0.53 1.91 ± 0.84 91.7 ± 8.7 1.24 ± 0.41 1.66 ± 0.60 94.2 ± 6.6 1.27 ± 0.44 1.72 ± 0.76 93.5 ± 7.7
10 1.37 ± 0.55 1.91 ± 0.82 91.2 ± 8.9 1.33 ± 0.49 1.75 ± 0.78 93.4 ± 8.0 1.34 ± 0.55 1.81 ± 1.00 93.1 ± 8.4
Table 2: Results of the contact experiment, similar to Ta-
ble 1. All networks were trained on a batch size of 10 ×100
for 50000 epochs.
Projection
Iterations
CDF SIREN SIREN light
MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑ MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑ MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑
1 7.86 ± 2.73 11.48 ± 3.93 39.5 ± 12.2 6.69 ± 2.75 11.00 ± 4.24 53.4 ± 13.1 7.33 ± 3.04 11.73 ± 4.49 50.4 ± 12.7
2 2.98 ± 1.07 4.79 ± 1.66 69.8 ± 12.4 1.94 ± 0.76 3.79 ± 1.62 85.9 ± 9.3 2.17 ± 0.83 4.25 ± 1.81 83.5 ± 9.5
3 2.23 ± 0.92 3.38 ± 1.36 77.8 ± 13.2 1.47 ± 0.57 2.32 ± 1.06 90.4 ± 8.0 1.58 ± 0.53 2.58 ± 1.04 88.7 ± 8.1
4 2.18 ± 0.86 3.20 ± 1.26 77.8 ± 13.5 1.42 ± 0.58 2.07 ± 0.93 90.7 ± 8.1 1.47 ± 0.54 2.17 ± 0.93 90.0 ± 8.1
5 2.19 ± 0.93 3.20 ± 1.43 77.9 ± 14.0 1.41 ± 0.49 2.02 ± 0.84 90.7 ± 7.9 1.51 ± 0.60 2.19 ± 1.01 89.3 ± 9.1
10 2.31 ± 1.01 3.29 ± 1.43 75.5 ± 14.8 1.46 ± 0.64 2.09 ± 1.15 90.4 ± 9.3 1.57 ± 0.72 2.23 ± 1.20 88.4 ± 11.2
CSDF-by-SIREN: Learning Signed Distances in the Configuration Space Through Sinusoidal Representation Networks
87
Table 3: Training time for 50000 epochs and number of trainable parameters for the neural-CDF network (Li et al., 2024a),
for our SIREN-based approach, and for the lighter version of the same network.
Batch Size Approach Training Time Trainable Parameters
20000 CDF 5:37:13 737 409
× SIREN 5:53:40 531 457
100 SIREN light 4:17:30 134 657
10 CDF 2:15:44 737 409
× SIREN 1:33:33 531 457
100 SIREN light 1:34:14 134 657
approach at a large batch size was likely caused by a
memory fragmentation issue in our system. Further-
more, no decrease in training time is observed using
the light variant over the full SIREN variant for the
smaller batch size, as for a batch size this small the
training operations take severely less time and hard-
ware overheads come heavily into play. Although this
means that training may take less time on different
systems, the fact that such issues can occur should be
kept in mind when implementing any of the discussed
methods.
Ultimately, it is important to note that, evidently,
the “light” variant of our proposed workflow is likely
the most desirable middle ground in terms of accu-
racy, training time, and memory requirements. In or-
der to squeeze out that last bit of a accuracy, one may
use our full-sized SIREN workflow. Either way, our
proposed solutions far outperform the alternatives.
7 CONCLUSION AND FUTURE
WORK
We have clearly and robustly defined the C-space
Signed Distance Function (CSDF) as a form of a
SDF. We have posed the problem of representing an
implicit function, such as the CSDF, utilizing recent
advancements in neural implicit representation and
work on C-space Distance Functions. We have pro-
posed a methodology for creating a neural approxima-
tion and implemented two variations of our proposed
method. We have set up an experiment to validate and
compare our method to another recently published ap-
proach tackling the same problem and found that our
method of representing the CSDF easily outperforms
the alternative.
In the future we aim to refine our approach with
more rigorous experimentation across many scenarios
and between different methods. Our very promising
results indicate that, provided a careful approach is
taken, this method can offer robust solutions to many
problems in the general field of robotics, such as mo-
tion planning and inverse kinematics. Specifically,
details such as the loss function should be investigated
further, as, while most of the literature agrees on the
fundamental parts, some details are left to be settled.
ACKNOWLEDGMENTS
The research project is implemented in the framework
of H.F.R.I. call “Basic research Financing (Horizontal
support of all Sciences)” under the National Recovery
and Resilience Plan “Greece 2.0” funded by the Eu-
ropean Union – NextGenerationEU (H.F.R.I. Project
Number: 16469).
REFERENCES
Bloomenthal, J. and Bajaj, C. (1997). Introduction to im-
plicit surfaces. Morgan Kaufmann.
Breen, D. E. and Whitaker, R. T. (1999). A level-set ap-
proach for the metamorphosis of solid models. In
ACM SIGGRAPH 99 Conference abstracts and appli-
cations, SIGGRAPH99, page 228. ACM.
Gropp, A., Yariv, L., Haim, N., Atzmon, M., and Lipman, Y.
(2020). Implicit geometric regularization for learning
shapes. In 37th International Conference on Machine
Learning, ICML 2020, pages 3747–3757.
Hao, Z., Averbuch-Elor, H., Snavely, N., and Belongie, S.
(2020). Dualsdf: Semantic shape manipulation us-
ing a two-level representation. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition.
Koptev, M., Figueroa, N., and Billard, A. (2023). Neural
joint space implicit signed distance functions for re-
active robot manipulator control. IEEE Robotics and
Automation Letters, 8(2):480–487.
Li, Y., Chi, X., Razmjoo, A., and Calinon, S. (2024a). Con-
figuration space distance fields for manipulation plan-
ning. In Robotics: Science and Systems XX, RSS2024.
Robotics: Science and Systems Foundation.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
88
Li, Y., Zhang, Y., Razmjoo, A., and Calinon, S. (2024b).
Representing robot geometry as distance fields: Ap-
plications to whole-body manipulation. In 2024 IEEE
International Conference on Robotics and Automation
(ICRA), page 15351–15357. IEEE.
Liu, P., Zhang, K., Tateo, D., Jauhri, S., Peters, J., and
Chalvatzaki, G. (2022). Regularized deep signed
distance fields for reactive motion generation. In
2022 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS). IEEE.
Mescheder, L., Oechsle, M., Niemeyer, M., Nowozin, S.,
and Geiger, A. (2019). Occupancy networks: Learn-
ing 3d reconstruction in function space. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR). IEEE.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2020). NeRF: Rep-
resenting Scenes as Neural Radiance Fields for View
Synthesis, page 405–421. Springer International Pub-
lishing.
Ortiz, J., Clegg, A., Dong, J., Sucar, E., Novotny, D., Zoll-
hoefer, M., and Mukadam, M. (2022). isdf: Real-
time neural signed distance fields for robot perception.
In Robotics: Science and Systems XVIII, RSS2022.
Robotics: Science and Systems Foundation.
Osher, S. and Fedkiw, R. (2003). Level Set Methods and
Dynamic Implicit Surfaces. Springer New York.
Park, J. J., Florence, P., Straub, J., Newcombe, R., and
Lovegrove, S. (2019). Deepsdf: Learning continuous
signed distance functions for shape representation. In
2019 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), page 165–174. IEEE.
Ratliff, N., Toussaint, M., and Schaal, S. (2015). Under-
standing the geometry of workspace obstacles in mo-
tion optimization. In 2015 IEEE International Con-
ference on Robotics and Automation (ICRA), page
4202–4209. IEEE.
Sitzmann, V., Martel, J., Bergman, A., Lindell, D., and Wet-
zstein, G. (2020). Implicit neural representations with
periodic activation functions. Advances in neural in-
formation processing systems, 33:7462–7473.
Vlachos, C. and Moustakas, K. (2024). High–fidelity hap-
tic rendering through implicit neural force representa-
tion. In International Conference on Human Haptic
Sensing and Touch Enabled Computer Applications,
pages 493–506. Springer.
Yariv, L., Gu, J., Kasten, Y., and Lipman, Y. (2021). Vol-
ume rendering of neural implicit surfaces. Advances
in Neural Information Processing Systems, 34:4805–
4815.
APPENDIX
During the initial stages of the presented research,
a debate in the literature between signed and un-
signed distance functions and their advantages, made
us wonder whether choosing a signed representation
was the better option. While a signed representation
was more intuitive to us and we felt that the continu-
ous derivatives was a very attractive feature, unsigned
CDFs had been successfully used already. After care-
ful testing, the signed representation appeared as a
more robust and stable option for our use cases. It
is worth mentioning that under certain circumstances
using an unsigned representation might be desirable,
if one is willing to sacrifice stability for marginally
higher peaks. For the sake of completeness, results for
an unsigned C-space Distance Function represented
using the same SIRENs are included in Table 4 for the
batch size of 20000 × 100 and Table 5 for the batch
size of 10 × 100. These may be directly compared to
the results of Table 1 and Table 2, respectively. Ad-
ditionally, Table 6 serves as an expansion to Table 3
that includes training time for the unsigned cases.
Table 4: Additional results of the contact experiment. Calculation of the C-space distances and gradients is performed by an
unsigned variant of our SIREN-based approach, and by a lighter version of the same network. Both networks were trained on
a batch size of 20000 × 100 for 50000 epochs. Results after 1, 2, 3, 4, 5, or 10 iterations are displayed. For Mean Average
Error (MAE) and Root Mean Squared Error (RMSE), lower is better. For Success Rate (SR), higher is better.
Projection
Iterations
SIREN (unsigned) SIREN light (unsigned)
MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑ MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑
1 4.58 ± 1.80 8.97 ± 3.49 70.5 ± 9.7 4.94 ± 1.93 9.25 ± 3.64 67.5 ± 10.0
2 1.37 ± 0.46 2.78 ± 1.19 93.9 ± 6.3 1.46 ± 0.45 2.99 ± 1.26 93.0 ± 5.8
3 1.15 ± 0.34 1.68 ± 0.63 95.6 ± 4.6 1.20 ± 0.35 1.75 ± 0.65 95.3 ± 5.5
4 1.23 ± 0.41 1.65 ± 0.66 94.6 ± 6.9 1.22 ± 0.37 1.63 ± 0.60 94.5 ± 5.8
5 1.27 ± 0.45 1.71 ± 0.75 93.9 ± 7.8 1.24 ± 0.40 1.65 ± 0.59 93.8 ± 6.6
10 1.37 ± 0.54 1.86 ± 0.91 92.8 ± 8.1 1.34 ± 0.52 1.75 ± 0.78 92.8 ± 9.2
CSDF-by-SIREN: Learning Signed Distances in the Configuration Space Through Sinusoidal Representation Networks
89
Table 5: Additional results of the contact experiment, similar to Table 4. Both networks were trained on a batch size of
10 × 100 for 50000 epochs.
Projection
Iterations
SIREN (unsigned) SIREN light (unsigned)
MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑ MAE (cm) ↓ RMSE (cm) ↓ SR (%) ↑
1 6.76 ± 2.62 11.11 ± 4.12 52.8 ± 12.2 7.20 ± 2.97 11.64 ± 4.46 51.5 ± 13.1
2 1.87 ± 0.73 3.58 ± 1.56 86.5 ± 8.8 2.05 ± 0.84 3.93 ± 1.77 84.7 ± 9.4
3 1.45 ± 0.59 2.26 ± 1.00 90.5 ± 8.1 1.58 ± 0.64 2.51 ± 1.10 88.5 ± 9.4
4 1.39 ± 0.48 1.98 ± 0.77 91.2 ± 7.6 1.49 ± 0.53 2.17 ± 0.94 89.4 ± 8.4
5 1.40 ± 0.54 1.99 ± 0.92 91.0 ± 8.2 1.54 ± 0.62 2.23 ± 1.04 88.8 ± 9.4
10 1.46 ± 0.55 2.09 ± 1.07 90.0 ± 8.9 1.65 ± 0.84 2.36 ± 1.36 87.4 ± 11.9
Table 6: Expanded form of Table 3 to include an unsigned variant of our SIREN-based approach and a lighter version of the
same network. Training time is measured for 50000 epochs.
Batch Size Approach Training Time Trainable Parameters
20000
CDF 5:37:13 737 409
SIREN 5:53:40
531 457
× SIREN (unsigned) 5:41:46
100
SIREN light 4:17:30
134 657
SIREN light (unsigned) 4:09:08
10
CDF 2:15:44 737 409
SIREN 1:33:33
531 457
× SIREN (unsigned) 1:32:05
100
SIREN light 1:34:14
134 657
SIREN light (unsigned) 1:32:52
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
90
