
Autonomous Drones
Divya B V, Anup Rao K, Ashish K Jacob, Vaishnav Pramod and Pattabi Ram
School of Electrical & Electronics Engineering, REVA University, Bangalore, India
Keywords: Autonomous Drone, Microcontroller-Based Control, Signal Mimicry, Raspberry Pi Zero, Quadcopter,
Cost-Effective Drone Control, Remote Control Emulation.
Abstract: This paper presents an innovative and cost-effective approach to autonomous drone systems, utilizing
microcontroller-based signal mimicry achieved through PWM signal analysis and recreation. The study
investigates the feasibility and effectiveness of this technique, demonstrating its potential for applications in
surveillance, logistics, disaster response, and environmental monitoring. By leveraging microcontrollers, the
system offers adaptability, scalability, and seamless integration with existing infrastructures, catering to
diverse operational needs. This paper contributes to the advancement of autonomous drone technology,
showcasing the potential of microcontroller-based signal emulation for cost-effective and adaptable drone
control. Additionally, emphasis is placed on the transformative potential of autonomous drone systems,
highlighting their capabilities in real-time data acquisition, machine learning, and collaborative swarm
intelligence across various industries.
1 INTRODUCTION
The exploration of autonomous drone control
methods has led to the investigation of integrating
microcontroller-based signal mimicry. This research
delves into various aspects of autonomous drones,
focusing specifically on Raspberry Pi Zero and other
cost-effective components. A comprehensive
investigation encompasses real-world performance,
adaptability, ethical considerations, and the unique
contributions of autonomous drone systems.
Various studies contribute to the advancement of
autonomous drone technology. Research on altitude
control algorithms and measurement fault diagnosis
provides essential insights for ensuring the
effectiveness of autonomous drone systems (Mung
and Lee, 2016), (Mung and et al. , 2017). Work on
deep reinforcement learning for navigation aligns
with the emphasis on innovative approaches in
autonomous drone control discussed in this
paper(Hodge, Hawkins, et al. , 2017). Investigations
into GNSS-based systems for delivery drones
highlight the importance of efficient navigation
techniques, relevant to the applications discussed in
this study (Hodge, Hawkins, et al. , 2017).
Additionally, proposed strategies for safer navigation
complement the focus on cost-effective and adaptable
drone control presented in this paper. These studies
collectively contribute to the progress of autonomous
drone technology, providing insights and solutions
that align with the objectives and findings of this
research.
This section explores the construction of the
experimental drone and the process of reading and
analyzing the signals generated by the transceiver. It
begins by outlining the conventional quadcopter
configuration, followed by a detailed description of
the components employed in the drone construction,
including information on the motors, electronic speed
controllers (ESCs), frame, propellers, and flight
controller. Additionally, details regarding the
transmitter and receiver used for wireless control of
the drone are provided.
Following the construction details, the intriguing
process of analyzing the transceiver's signals is
explored. Here, the Arduino UNO, a versatile
microcontroller, is leveraged to capture and interpret
the signals with accuracy. Discussion focuses on the
specific PWM pins utilized and their frequencies,
emphasizing their role in capturing crucial
information. A block diagram is presented to visually
represent the signal processing pipeline and how the
signals are received and processed by the Arduino.
The analysis extends beyond simply capturing the
signals. It demonstrates how to effectively read and
interpret these signals using the Arduino UNO's
914
B V, D., K, A. R., Jacob, A. K., Pramod, V. and Ram, P.
Autonomous Drones.
DOI: 10.5220/0013734900004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 914-919
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
capabilities and a well-conceived approach. This
paves the way for subsequent analysis and decision-
making, enabling the extraction of valuable
information and precise control over the drone's
movements. The process is showcased through
figures depicting the signal behavior when the
transceiver is turned on and off, as well as how the
signal alters with adjustments to the throttle on the
controller. Such analysis is crucial for ensuring
optimal performance and identifying any potential
issues with the control system.
2 QUADCOPTER
CONSTRUCTION AND
PROBLEM FORMULATION
Quadcopters, a prominent type of UAVs, have
captured researchers' interest due to their exceptional
features. These include high maneuverability,
reliability, versatile applications, and cost-
effectiveness. With their four rotors arranged
symmetrically, quadcopters excel in navigating
complex environments with precision. Their compact
size and straightforward design make them ideal for
various tasks such as aerial photography,
surveillance, search and rescue missions, and package
delivery. This versatility and efficiency make
quadcopters a compelling choice for both research
and practical applications (Ozbek, Onkol, Garcia,
2018).
Various studies explore advancements in
autonomous drone technology. One study introduces
an optimization framework for vision-based
autonomous drone navigation, enhancing tasks like
surveillance and environmental monitoring (Navardi,
Shiri, et al. , 2016). Another research effort focuses
on autonomous drone delivery systems, potentially
revolutionizing last-mile logistics (Kannan;, Min,
Hong, 2019). A separate study discusses continuous
maneuver control and data capture scheduling of
autonomous drones in wireless sensor networks,
aiming to optimize data acquisition efficiency(Li, Ni,
Hong, 2019). Additionally, a proposed resource-
efficient online target detection system utilizes
autonomous drones, enhancing IoT applications
(Wang, Gu, et al. , 2020). Furthermore, research
examines the stability of small-scale UAVs under
PID control with added payload mass, contributing to
the understanding of drone stability (Pounds, Bersak,
et al. , 2019). Another study discusses resilient
control design for intelligent vehicle lateral motion
regulation, offering insights applicable to drone
control systems (Chang, Liu, et al. , 2017). Finally,
visual servoing techniques for micro quadrotors
landing on ground platforms are explored, addressing
challenges in drone precision landing (Huang,
Chiang, et al. , 2022).
In this section of the paper, the investigation into
autonomous drone control methods delved into the
integration of microcontroller-based signal mimicry.
Various aspects of autonomous drones were
explored, focusing on Raspberry Pi Zero and other
inexpensive components. The findings cover real-
world performance, adaptability, ethical
considerations, and the unique contributions of
autonomous drone systems.
In this section, the construction of the drone for
experimentation and reading the signals created by
the transceiver for recreation will be briefly
discussed.
2.1 Drone Construction
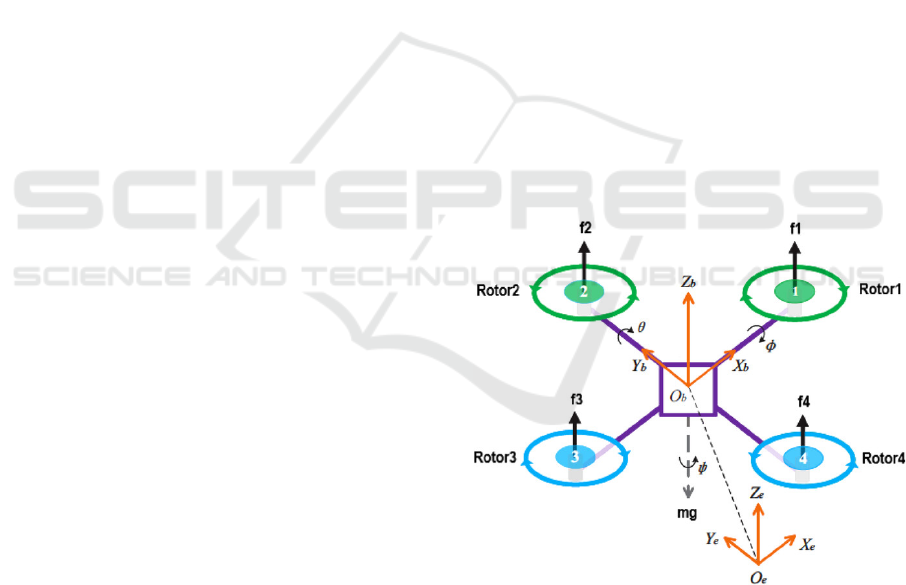
In this Subsection, Figure 1 depicts the conventional
quadcopter configuration, comprising four rotors
mounted on arms extending from a central body. Each
rotor is powered by a brushless DC (BLDC) motor,
generating downward thrust forces to achieve vertical
lift. The magnitude and direction of the thrust forces
are adjustable by varying the motor speeds.
Figure 1: Quadcopter Configuration
The drone system employed for our
experimentation utilized cost-effective components
to minimize expenses. The motors were 1000
RPM/Volt BLDC motors, known for their high power
and efficiency. To control the motor speeds, four
electronic speed controllers (ESCs) were utilized.
The drone frame was an f450 model, commonly
preferred by DIY drone builders. Plastic propellers
Autonomous Drones
915
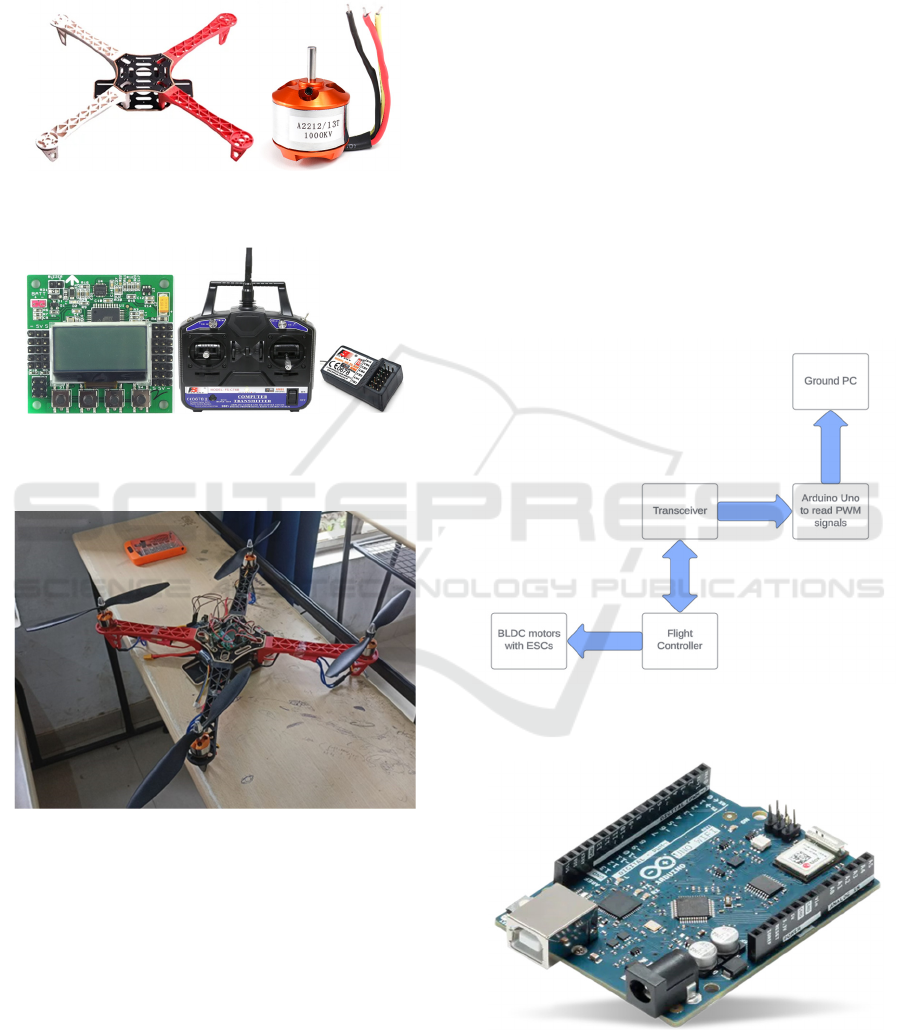
were chosen for their combination of lightness and
durability. The flight controller was a KK2.1.5
model, a popular open-source option. Lastly, for
wireless control of the drone, a Flysky transmitter and
receiver were used.
Figure 2: F450 drone frame and 1000 RPM/Volt BLDC
motor used in the construction of the drone
Figure 3: KK2.1.5 Flight Controller for stability of the
system and Flysky transmitter and receiver used further
down in section B
Figure 4: The experimental quadcopter drone, used for
experimentation and further research.
The constructed drone system is capable of
executing various maneuvers, including hovering,
forward and backward flight, and left and right turns.
It exhibited stability and ease of control, even in
windy conditions.
2.2 Reading Receiver Signal
In this section, the procedure of analyzing the signals
generated by the transceiver of the drone system will
be investigated and examined. To accomplish this,
the Arduino UNO, a versatile microcontroller known
for its widespread use in various DIY projects, was
employed.
Specifically, designated Pulse Width Modulation
(PWM) pins on the Arduino UNO, including pins 3,
5, 6, 9, 10, and 11, were utilized for capturing and
interpreting the signals transmitted by the transceiver
with accuracy. These PWM pins have frequencies of
490 Hz, except for pins 5 and 6, which have
frequencies of 980 Hz. They are essential for
capturing and interpreting the signals transmitted by
the transceiver accurately.
Figure 5 presents a simplified block diagram
illustrating the flow of PWM signals from the
transceiver to the Arduino UNO. This diagram serves
as a visual representation of the signal processing
pipeline, facilitating a comprehensive understanding
of how the signals are received and processed by the
Arduino
Figure 5: Block Diagram of the Basic Reading Process of a
Transceiver Signal
Figure 6: The Arduino UNO is able to read pulse width
modulation (PWM) signals emanating from the transceiver.
INCOFT 2025 - International Conference on Futuristic Technology
916

3 MAIN RESULT
3.1 Signal Analysis
By strategically leveraging the capabilities of the
Arduino UNO and employing a well-conceived
approach to signal acquisition, one can effectively
read and interpret the signals produced by the
transceiver of the drone system. This lays the
foundation for subsequent analysis and decision-
making, enabling the extraction of valuable
information and precise control over the drone's
movements.
Figure 7: Detection of the signal when the transceiver was
turned ON.
Figure 8: Alterations in the signal when the throttle on the
transceiver was adjusted to the maximum.
The analysis presented in Figures 7-11 focuses on
channel 2, corresponding to the throttle of the drone
controller. This involves capturing and plotting the
signal over time to understand its behavior.
The y-axis represents the signal, while the x-axis
represents time. The graph visually illustrates how the
signal changes in response to movements of the
remote controller stick, allowing assessment of
throttle channel stability, responsiveness, and overall
performance.
Similar analyses are conducted for all four
channels of the transceiver. By comparing signal-to-
time graphs of different channels, any discrepancies
or inconsistencies in behavior can be identified. This
ensures optimal functioning of all channels and the
drone controller.
Figure 9: Alterations in the signal as the throttle on the
transceiver was varied in an upward and downward
direction
Figure 10: Alterations in the signal when the throttle on the
transceiver was adjusted to the minimum.
Figure 11: Changes seen in the signal when the transceiver
was turned OFF.
Channel 2 analysis provides insights into throttle
control, showing how the signal modulates to adjust
the drone's speed and altitude. Evaluation includes
assessing throttle response smoothness, presence of
sudden signal changes, and overall control system
stability.
Analyzing all channels' signal-to-time graphs
offers a comprehensive understanding of the drone
controller's performance. This analysis is essential for
optimizing controller behavior and ensuring reliable
drone operation.
In summary, examining Channel 2 involves
capturing and graphically representing the signal over
Autonomous Drones
917
time to assess throttle channel performance. Similar
analyses across all channels aid in identifying
discrepancies and optimizing controller behavior for
efficient drone operation.
3.2 Recreation
In this section of the project, the process of achieving
simple automation of a quadcopter by analyzing the
signals produced by the transceiver and recreating
them using a microcontroller is delved into. This
approach aims to provide a cost-effective and
customizable solution for controlling the quadcopter
without relying on expensive commercial remotes.
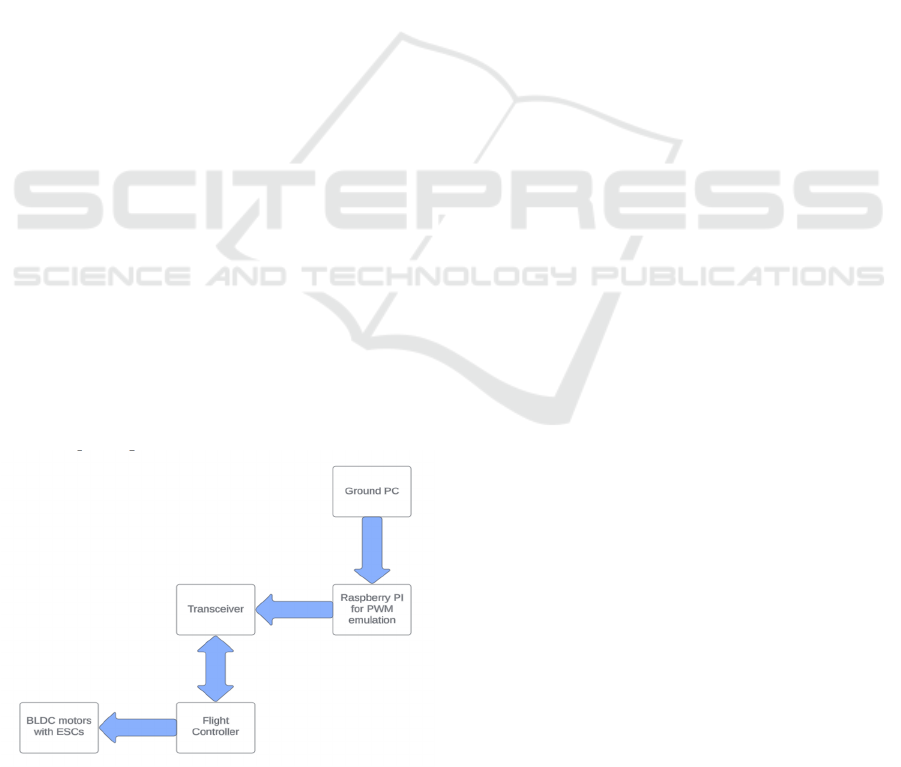
To accomplish this objective, the Raspberry Pi
Zero microcontroller was utilized, widely recognized
for its adaptability and extensive application in DIY
projects. The Raspberry Pi Zero serves as the central
processing unit of the automated system, interpreting
signals received from the ground personal computer
(PC) of the transceiver and generating appropriate
control commands for the quadcopter, as depicted in
Figure 12.
The process began with thorough analysis of the
signals transmitted by the transceiver. Using the
Arduino UNO and its PWM pins, specific patterns
and frequencies associated with different control
inputs, such as throttle, yaw, pitch, and roll, were
identified. This analysis provided an understanding of
the communication protocol between the transceiver
and the quadcopter.
Based on the signal analysis, a Python script was
developed to emulate the transceiver's signals. The
script generates PWM signals with varying duty
cycles, corresponding to the desired control inputs.
The Raspberry Pi Zero's GPIO pins are utilized to
output these PWM signals, providing precise control
over the quadcopter's movements.
Figure 12: Block Diagram of the Basic emulating Process
of the Transceiver Signal
By combining signal analysis with
microcontroller emulation, simple automation of the
quadcopter was achieved. This method offers a
flexible and cost-effective alternative to commercial
remote controls, enabling customization and
integration with other systems.
4 CONCLUSION
Our investigation into microcontroller-based
autonomous drone systems yielded promising results,
demonstrating the feasibility and effectiveness of this
approach. A cost-effective drone was successfully
constructed using readily available components, and
our process for reading, analyzing, and emulating the
transceiver signals was established. This enabled the
achievement of basic automation of the quadcopter
through the Raspberry Pi Zero microcontroller,
serving as a customizable alternative to traditional
remote controls.
The key findings of our study can be summarized
as follows:
Effective signal analysis and emulation: The
Arduino UNO was successfully employed to capture
and interpret the transceiver signals, paving the way
for their subsequent emulation using the Raspberry Pi
Zero.
Cost-effective and adaptable solution: The use of
readily available components and our
microcontroller-based approach offer a cost-effective
and adaptable solution for autonomous drone control
compared to traditional methods.
Potential for diverse applications: The developed
system lays the groundwork for further exploration
and potential applications in various fields, including
surveillance, logistics, disaster response, and
environmental monitoring.
While this paper focused on basic automation, it
serves as a valuable stepping stone for further
development of autonomous drone systems. Future
research can explore more complex maneuvers,
integrate sensor data for environment awareness, and
investigate the application of machine learning
algorithms for enhanced decision-making
capabilities. Additionally, ethical considerations
regarding data privacy, safety, and responsible drone
use must be continually addressed as the technology
advances.
In conclusion, this paper has demonstrated the
potential of microcontroller-based signal emulation
for cost-effective and adaptable autonomous drone
control. This technology has the potential to
significantly impact various industries and pave the
INCOFT 2025 - International Conference on Futuristic Technology
918

way for innovative solutions in the future of drone
technology.
REFERENCES
O. I. D. Bashi, W. Z. W. Hasan, N. Azis, S. Shafie, and H.
Wagatsuma, ‘‘Unmanned aerial vehicle quadcopter: A
review,’’ J. Comput. Theor. Nanoscience, vol. 38, pp.
529–554, Dec. 2016.
N. Xuan-Mung and S.-K. Hong, ‘‘Improved altitude control
algorithm for quadcopter unmanned aerial vehicles,’’
Appl. Sci., vol. 9, no. 10, p. 2122, May 2019.
N. Xuan-Mung and S.-K. Hong, ‘‘Barometric altitude
measurement fault diagnosis for the improvement of
quadcopter altitude control,’’ in Proc. 19th Int. Conf.
Control, Autom. Syst. (ICCAS), Jeju, South Korea,
Oct. 2019, pp. 1359–1364.
V. J. Hodge, R. Hawkins, and R. Alexander, "Deep
reinforcement learning for drone navigation using
sensor data," Journal of Big Data, vol. 6, no. 1, p. 53,
Jun. 2020. DOI: 10.1186/s40537-019-0264-9.
A. Patrik et al., "GNSS-based navigation systems of
autonomous drone for delivering items," Journal of Big
Data, vol. 6, no. 1, p. 53, Jun. 2019. DOI:
10.1186/s40537-019-0264-9.
N. S. Ozbek, M. Onkol, and M. O. Efe, ‘‘Feedback control
strategies for quadrotor-type aerial robots: A survey,’’
Trans. Inst. Meas. Control, vol. 14, no. 5, pp. 5663–
5675, 2017.
Mozhgan Navardi; Aidin Shiri; Edward Humes; Nicholas
R. Waytowich; Tinoosh Mohsenin, “ An Optimization
Framework for Efficient Vision-Based Autonomous
Drone Navigation”. 2022 IEEE AICAS, (Incheon,
Republic of Korea), 2022.
Shyam Sundar Kannan; Byung-Cheol Min, “Autonomous
Drone Delivery to Your Door and Yard”. 2022 IEEE
ICUAS, (Dubrovnik, Croatia), 2022.
Kai Li; Wei Ni; Falko Dressler, “Continuous Maneuver
Control and Data Capture Scheduling of Autonomous
Drone in Wireless Sensor Networks”. IEEE
Transactions on Mobile Computing ( Volume: 21,
Issue: 8), 2022.
Qiuhong Wang; Jingjing Gu; Haitao Huang; Yanchao
Zhao; Mohsen Guizani, “A Resource-Efficient Online
Target Detection System With Autonomous Drone-
Assisted IoT”,IEEE Internet of Things Journal (
Volume: 9, Issue: 15),2022.
P. E. I. Pounds, D. R. Bersak, and A. M. Dollar, ‘‘Stability
of small scale UAV helicopters and quadrotors with
added payload mass under PID control,’’ Auto. Robots,
vol. 33, nos. 1–2, pp. 129–142, Aug. 2012.
X.-H. Chang, Y. Liu, and M. Shen, ‘‘Resilient control
design for lateral motion regulation of intelligent
vehicle,’’ IEEE/ASME Trans. Mechatronics, vol. 24,
no. 6, pp. 2488–2497, Dec. 2019.
C. M. Huang, M. L. Chiang, and T. S. Hung, ‘‘Visual
servoing of a micro quadrotor landing on a ground
platform,’’ Int. J. Control, Autom. Syst., vol. 15, no. 6,
pp. 2791–2805, 2017.
Autonomous Drones
919
