
Δ-Y Transformations in Manipulator’s Stiffness Analysis
Alexandr Klimchik
1a
and Anatol Pashkevich
2,3 b
1
Lincoln Centre for Autonomous Systems Research (L-CAS),
University of Lincoln, Brayford Pool, Lincoln, Lincolnshire. LN6 7TS, U.K.
2
IMT Atlantique Nantes, 4 rue Alfred-Kastler, Nantes 44307, France
3
Le Laboratoire des Sciences du Numérique de Nantes (LS2N), 1 rue de la Noe, 44321 Nantes, France
Keywords: Over-Constrained Robotic Manipulator, Stiffness Modelling, Cross-Linkages, Stiffness Model
Transformation.
Abstract: The paper proposes a Δ-Y transformations technique for stiffness modelling of over-constrained manipulators
with internal cross-linkages. It allows representing complex structures as a serial-parallel equivalent one that
can be easily handled by the VJM-based method. To derive desired analytical expressions for the equivalent
serial-parallel structure, the MSA-based stiffness modelling approach is employed first, which allows
describing the stiffness response for both the Δ and Y structures operating with VJM-type stiffness matrices.
Further, the desired relations between equivalent Δ-Y and Y-Δ stiffness matrices are obtained. The example
of stiffness modelling of a non-rigid Gough-Stewart platform with multiple cross-linkages demonstrates the
benefits of the proposed technique.
1 INTRODUCTION
Stiffness modelling is a hot topic in robotics, essential
both for the robot manipulation accuracy
improvement and human-robot collaboration
enhancement (Wu et al., 2022, Hussain et al., 2021,
Yue et al., 2022, Blumberg et al., 2021). It enables
the estimation of mechanical deflections in the
manipulator components, resulting in slight changes
to the actual configuration. Based on the computed
deflections, the related compliance error
compensation techniques help to reduce the impact of
the external forces on the manipulator's end-effector
and improve the end-effector accuracy (Nguyen et al.,
2022, Gonzalez et al., 2022, Kim & Min, 2020,
Klimchik, Pashkevich, et al., 2013, Kim, 2023).
Currently, because of practical advantages, the most
commonly used stiffness modelling approaches in
robotics are Virtual Joint Modelling (VJM) and
Matrix Structural Analysis (MSA) (Gosselin &
Zhang, 2002, Pashkevich et al., 2009, Majou et al.,
2007, Quennouelle & Gosselin, 2008, Deblaise et al.,
2006, Klimchik, Pashkevich, et al., 2019). They are
relatively simple from the computational point of
a
https://orcid.org/0000-0002-2244-1849
b
https://orcid.org/0000-0002-1190-078X
view but require substantial efforts for related
stiffness model development and estimation of its
parameters. The modelling accuracy for both VJM
and MSA methods can be enhanced by relying on the
CAD-based FEA identification technique (Klimchik
et al., 2024). Considering mathematical
fundamentals, the VJM is efficient for stiffness
modelling of pure serial-parallel structures, which can
be decomposed into equivalent serial ones (Görgülü
et al., 2020, Hu et al., 2019). In contrast, the MSA
struggles with serial structures but can handle
complex cross-linkages (Deblaise et al., 2006,
Klimchik, Chablat, et al., 2019, Soares Júnior et al.,
2015, Detert & Corves, 2017, Klimchik et al., 2018).
It was proved that the VJM is the best approach for
non-linear stiffness analysis (Zhao et al., 2022,
Pashkevich et al., 2011). For these reasons,
integrating cross-linkages in the VJM is a crucial
problem.
There were some attempts to integrate closed
loops into VJM methods (Klimchik, Wu, et al., 2013,
Klimchik et al., 2017). But they are not capable of
handling cross-linkages. To overcome this problem,
we propose a Δ-Y stiffness model transformation
72
Klimchik, A. and Pashkevich, A.
Î
ˇ
T-Y Transformations in Manipulator’s Stiffness Analysis.
DOI: 10.5220/0013732600003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 72-81
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
technique that allows us to present cross-linkages as
an equivalent serial-parallel mechanical structure
while preserving the original mechanical properties
of the system.
2 STIFFNESS MODELLING VIA
Δ-Y TRANSFORMATIONS
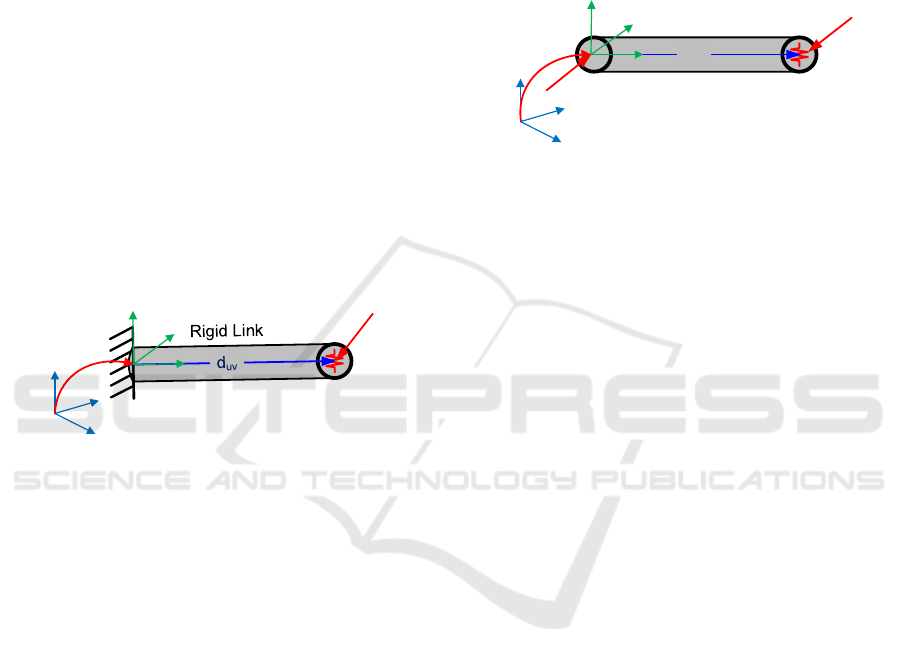
2.1 Stiffness Model of an Elastic Link
VJM represents each elastic component as a
superposition of a rigid element (between the nodes
uv→
), which describes the geometry of the perfect
component, and an elastic component at the right end
of the link (node v), which represents the mechanical
flexibility of the corresponding body, as shown in 0,
where the node u is fixed to the base or previous
component. This model is mathematically expressed
as a linear matrix equation.:
u
v
Δt
uv
R
uv
K
W
Figure 1: VJM-based stiffness model of a flexible link.
uv
=⋅ΔWK t (1)
relating the 6-dimensional wrench
W
consisting of
three force components and three moment
components applied to node v and the corresponding
displacement
Δt
is a 6-dimensional vector
consisting of three linear displacements and three
angular displacements. Here,
66×
stiffness matrix
uv
K must be expressed in the global coordinate
system, while the VJM usually operates with the
stiffness matrix
θ
K
obtained in the local coordinate
system. The latter demands a relevant transformation
θ uv
→KK
33 33
33 33
66 66
θ
uv uv
uv
uv u
T
v
××
××
××
⋅
=
⋅
R0 R0
KK
0R 0R
(2)
depending on the
33×
rotation matrix
uv
R which
defines the link uv orientation with respect to the
global coordinate system. It should be noted that in
classical VJM, the transformation (2) is incorporated
in the manipulator Jacobian, but it should be applied
straightforwardly here.
Let us also present an alternative MSA-based
model describing the elastic member composed of the
rigid link and virtual spring, assuming that both ends
of the link u, v are not fixed (see 0). Generally, such
a model is represented in the form of a matrix
equation as
d
uv
u
v
Rigid Link
uv
R
v
W
uv
K
v
Δt
u
W
u
Δt
Figure 2: MSA-based stiffness model of a flexible link.
11 12
21 22
1122
uu
vv
×
Δ
=⋅
Δ
Wt
KK
Wt
KK
(3)
relating the 6-dimensional wrenches
()
,
uv
WW
applied to the nodes u, v and the corresponding
displacements
()
,
uv
ΔΔtt
. It is clear that for the
considered physical model (rigid link + virtual
spring), the sub-matrices
11 12 21 22
,,,KKKK
can be
expressed via the spring stiffness matrix
uv
K and link
geometry vector
uv
d . Corresponding derivations are
presented in (Klimchik, Pashkevich, et al., 2019) and
yield the following expression with a symmetrical
matrix of the size
12 12×
1
1
12 12
TT
u uvuvuv uvuv u
vv
uv uv uv
−−−
−
×
−
=⋅
−
KK
K
WDDD Δt
K
WΔt
D
(4)
It includes
66×
geometric transformation matrix
(Klimchik et al., 2024)
()
3
3
6
3
333
6
uv
uv×
××
×
−
=
×
D
Id
0I
(5)
defining translation from the node u to the node v
expressed in the global coordinate system, which
includes a
33×
skew-symmetric matrix
()
uv
×d
derived from the vector
uv
d (
uv→
) in the following
way
()
31
33
0
0;
0
zy
x
zx y
yx
z
dd
d
dd d
dd
d
×
×
−
−
=−=−
−
−
×dd
, (6)
Î
ˇ
T-Y Transformations in Manipulator’s Stiffness Analysis
73
as well as
33×
identity and zero matrices
3333
,
××
I0
. It has been proven that the matrix
uv
D inversion
leads to a simple change of the vector
uv
d direction
()
3
1
3
3333
uv
uv
×
×
−
×
×
=
Id
0I
D
(7)
that yield the following properties
1
vu uv
−
=DD
(8)
Similar properties are observed in the transformed
matrices
()
()
33
3
33
33
3
33
33
T
uv
uv
T
uv
uv
××
×
×
×
−
×
=
=
−
×
×
D
I0
dI
I0
dI
D
(9)
Based on these properties, the following important
matrix multiplication rules were derived
11
;
TT T
ij ik kj ik ij kj
−− −−
==DD D DD D
(10)
which are convenient for the mathematical
derivations presented below. It is also worth
mentioning that in eq. (4) the rank of
12 12×
matrix
is equal to 6, which is in good agreement with the
physical properties of link representations. In fact, the
lines of this block matrix are linearly dependent and
satisfy an obvious relation
61
T
uuvv
−
×
+=WDW0
(11)
that in the adopted notation expresses the static
equilibrium condition, resulting in a rank deficiency
of 6. In the following subsection, the obtained model
will be used to derive stiffness models of complex
structures.
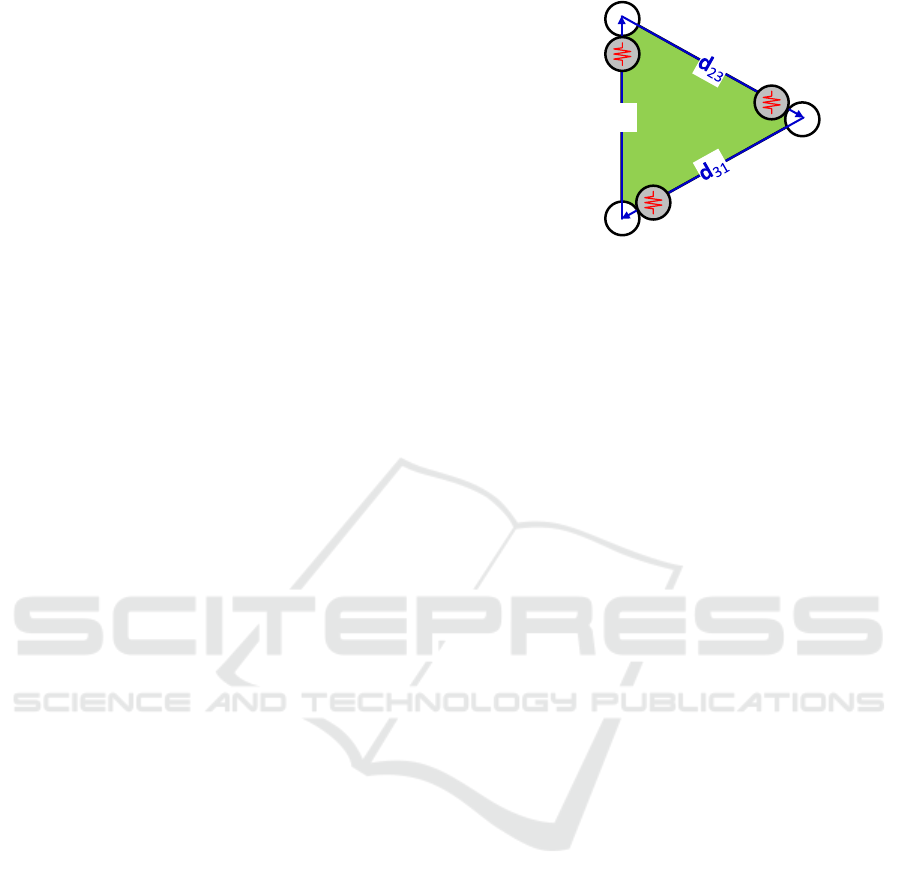
2.2 Stiffness Models of Δ-Structures
Using the elastic link stiffness model (4) let us derive
the stiffness models for Δ- and Y-structures, which
are presented in 0. Each of them consists of three
elastic components connected either at the corners or
a single central node.
2
3
1
K
12
K
23
K
31
d
12
Figure 3: VJM-based stiffness models for Δ-structure and
their parameters.
For the Δ-structure, the stiffness model of the
separate elastic links (1,2) (2,3) (3,1) can be written
as follows:
(12) 1 (12)
1 121212 1212 1
(12) 1 (12)
21212122
TT−−−
−
−
=⋅
−
WKDDD Δt
WD ΔKt
K
K
(12)
1(23) (23)
23 23 23 23 2322
(23) (23)
1
3323 23 23
TT−−−
−
−
=⋅
−
DDD
W
KK
KK
Δt
WΔtD
(13)
1
(31) (31)
31 31 31 31 31
33
1
(31) (31)
31 31 31
11
TT−−−
−
−
=⋅
−
DDDWK K
KK
Δt
DWΔt
(14)
Further, taking into account that total wrenches
123
,,WWW
are expressed as
(12) (31)
11 1
(12) (23)
22 2
(31) (23)
33 3
=+
=+
=+
WW W
WW W
WW W
(15)
and the node displacements satisfy the following
constraints
(12) (31)
11
(12) (23)
22
(31) (23)
33
=
=
=
Δt Δt
Δt Δt
Δt Δt
(16)
the desired stiffness model can be re-written in the
form of a single matrix equation
() () ()
11 12 13
11
() () ()
2212223 2
() (
3
18 1
3
8
)()
31 32 33
ΔΔΔ
ΔΔΔ
ΔΔΔ
×
Δ
=Δ
Δ
⋅
KKK
Wt
WKKK t
Wt
KKK
(17)
where
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
74
()
11 12 31
()
12
()
13
()
21
()
22 23 1
1
2
()
23
()
31
()
32
()
33 31 23
1
12 12
12 12
1
31 31
1
12 2
1
23 23
23 23
31 31
1
23 23
1
31 31
T
T
T
T
T
T
Δ− −
−
−
−
−−
−
−
−
Δ
Δ
−−
Δ
Δ
Δ
Δ
Δ
Δ
+
−
−
−
+
−
=
=
=
=
=
−
=
=
−
+
=
=
KKK
KK
KK
KK
KKK
KK
K
K
DD
D
D
D
D
K
K
KK
DD
D
D
K
D
D
(18)
It can be proved that the rank of
18 18×
matrix is
equal to 12, which agrees with the physical properties
of the considered Δ-structure. In fact, the lines of this
block matrix are linearly dependent and satisfy an
obvious relation
1122 31361
TT−
×
++=WDW DW 0
(19)
that in the adopted notation expresses the static
equilibrium condition, resulting in a rank deficiency
of 6.
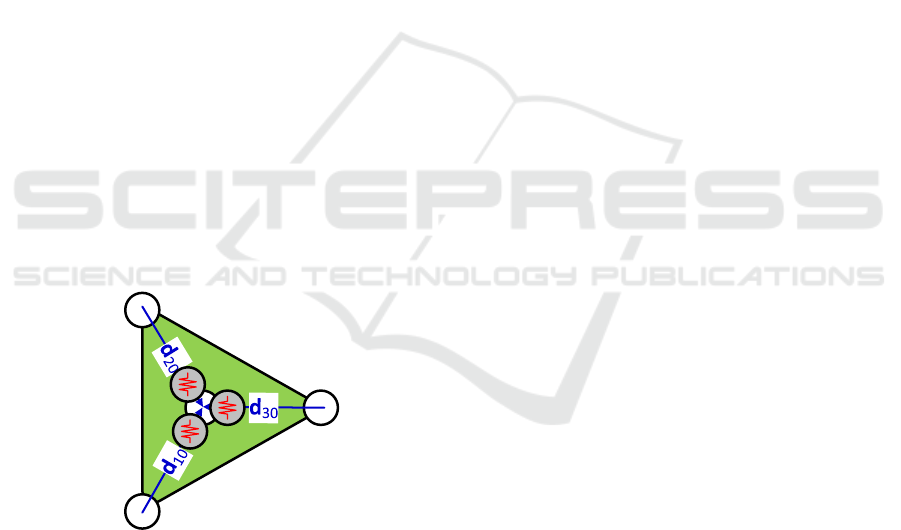
2.3 Stiffness Models of Y-Structures
For the Y-structure, presented in 0, the stiffness
model of the separate elastic links (1,0) (2,0) (3,0) can
be written as follows
0
2
3
1
K
30
K
10
K
20
Figure 4: VJM-based stiffness models for Y-structure
and their parameters.
1(10) (10)
10 10 10 10 1011
(10) (10)
1
0010 10 10
TT−−−
−
−
=⋅
−
DDD
W
KK
KK
Δt
WΔtD
(20)
1
(20) (20)
20 20 20 20 20
22
(20) (20)1
0020 20 20
TT−−−
−
−
=⋅
−
DDDWK K
KK
Δt
WΔt
D
(21)
(30) 1 (30)
330303030303
(30) 1 (30)
03030300
TT−−−
−
−
=⋅
−
WKDDD Δt
WD ΔKt
K
K
(22)
Further, taking into account that total wrenches
123
,,WWW
are expressed as
(10) (20) (30)
00 0 0
(10)
11
(20)
22
(30)
33
=++
=
=
=
WW W W
WW
WW
WW
(23)
and the node displacements satisfy the following
constraints
(10) (20) (30)
000
==Δt Δt Δt
(24)
the desired stiffness model can be rewritten in the
form of a single matrix equation
(Y0) (Y0)
11 6 6 14
11
(Y0) (Y0)
2622624 2
(Y0) (Y0)
33
6 6 33 34
(Y0) (
4
66
6
4
6
6
Y0) (Y0) (Y0)
0
142 344
6
0
××
××
××
Δ
Δ
=⋅
Δ
Δ
K00K
Wt
W0K0K t
Wt
00KK
Wt
KKKK
(25)
where
(Y0)
11 10
(Y0)
14
(Y0)
2
3
220
(Y0)
24
(
1
10 10
10 10
1
20 20
20 20
1
30 30
30 30
1
10 10
1
20 20
1
030
10 20 30
Y0)
33 30
(Y0)
34
(Y0)
41
(Y0)
42
(Y0)
43
(Y0)
44
T
T
T
T
T
T
−−
−
−−
−
−−
−
−
−
−
−
−
−
−
−
=
=
=
=
=
=
=
=
=
=++
−
DD
D
DD
D
DD
KK
KK
KK
KK
KK
KK
KK
KK
KK
D
K
D
D
D
KK K
(26)
It can be proved that the rank of
24 24×
matrix is
equal to 18, which agrees with the physical properties
of the considered Y-structure. In fact, the lines of this
block matrix are linearly dependent and satisfy an
obvious relation
010120230361
TT T
×
++ + =WDWDWDW0
(27)
the desired stiffness model can be rewritten in the
form of a single matrix equation
To simplify further derivations, let us present both
models in a similar way, with the matrices of the same
dimensions of
18 18×
. For this purpose, let us
eliminate the redundant variable
0
Δt from the linear
matrix equation (25). Taking into account that in the
Î
ˇ
T-Y Transformations in Manipulator’s Stiffness Analysis
75
Δ-type structure, no wrench is applied to the node #0,
i.e.
016×
=W0, the last line of (25) can written as
11 1
10 10 20 20 30 30
10 20 30
123
0
()
−− −
−
Δ
−⋅Δ ⋅ −Δ⋅Δ+
+++⋅=
KtKtKt
KKK t0
DDD
(28)
which yields the following expression for the
deflections in the free node #0
3
11
10 10 2
11
012
1
020
1
30 30
−−−
ΣΣ
−
Σ
−
−
Δ= Δ+ Δ
Δ+
KD D
D
tK tKK t
KK t
(29)
where
10 20 30Σ
=++KKKK
(30)
After substitution
0
Δt into the three remaining
lines of the equation (25), one can obtain the reduced-
size stiffness model of the Y-structure as
(Y) (Y) (Y)
11 12 13
11
(Y) (Y) (Y)
2212223 2
(Y) (Y) (Y)
33
31 3
18 1
2
8
33
×
Δ
=Δ
Δ
⋅
KKK
Wt
W KKK t
Wt
KKK
(31)
where
(Y) 1
11 10
(Y) 1
12
(Y) 1
13
(Y) 1
21
(Y) 1
22 20
(Y) 1
23
(Y)
11
10 10 10 10 10 10
1
10 10 20 20
1
10 10 30 30
1
20 20 10 10
11
20 20 20 20 20 20
1
20 20 30
31
30
TT
T
T
T
TT
T
−−− −
−−
−−
−−
−−− −
−
−
Σ
−
Σ
−
Σ
−
−
Σ
−
Σ
−
Σ
−
−
−
−
−
−
=
=
=
=
=
=
KK KKK
KKKK
KKKK
KKKK
KK KKK
DDD D
DD
DD
K
D
DK
K
D
D
K
DD
K
D
D
1
30 30 10 10
1
30 30 20 20
11
30 3
(
0
1
(Y) 1
3
0
2
Y) 1
33 3 3 30 30 300
T
T
TT
−−
−
Σ
−
−
−
−
−
Σ
−− −
Σ
=−
−
−
=
=
DD
DD
D
KKK
KK
KDD D
KK
KK KK
(32)
It gives a representation for the Y-structure similar to
the Δ-type one (17). It is obvious that both
representations operate with symmetrical matrices of
size
18 18×
whose rank is equal to 12. Here, the rank
deficiency of 6 is induced by the equilibrium
condition (27), which for
016×
=W0 can be easily
transformed into the form (19) after left-
multiplication by
10
T−
D
and relevant transformations
using the
D-matrix properties (10).
2.4 Transformation of Y-Structure to
Equivalent Δ-Structure
Now, let us derive expressions relating the parameters
of Y- and Δ-structures with similar stiffness
properties (see 0). To derive the desired expressions
for
Y →Δ
transformation, let us equate the upper
off-diagonal components from equations (17) and
(31), i.e. block-matrix elements
() (Y)
12 12
() (Y)
13 13
() (Y)
23 23
Δ
Δ
Δ
=
=
=
KK
KK
KK
(33)
This yields the following equations
1
12 12 10 10 20 20
1
23 23 20 20 30 30
11
31 3 0
1
1
1
1 10 1 30 30
TT
TT
T
−− −
Σ
−− −
−− −
−
−
Σ
−
Σ
−
=
−
−−
−−
=
=
KKKK
KKKK
KK
DD D
DD D
DDKDK
(34)
2
3
1
0
2
3
1
K
30
K
10
K
20
Δ -type model
Y-type model
K
12
K
23
K
31
d
12
Figure 5: VJM-based Y-Δ transformation in the stiffness
models.
that are easily solved for the desired Δ-structures
parameters
12 23 31
,,KKK (stiffness matrices)
1
12 12 10 10 20 20
1
23 23 20 20 30 30
1
31 10 10 30 30 31
1
1
1
TT
TT
T
−−
−
−
Σ
−
Σ
−
−
Σ
−−
=
=
=
KKKK
KK
DD D
DD D
DD
K
KKKD
K
K
(35)
Further, taking into account the symmetry of the
stiffness matrices
jij
T
i
=KK
and specific properties
of the
D-matrix (10) allowing following
simplifications
12 10
23 20
11
10 30 31
20
30
T
TTT
TT
−−
−
−
−
−
=
=
=
DDD
D
D
DD
DD
(36)
the above expressions (35) are reduced to a more
convenient form
11
12 20 10 20 20
11
23 30 20 30 30
11
31 10 30 10 10
T
T
T
−−−
Σ
−−−
Σ
−−−
Σ
=⋅ ⋅
=⋅ ⋅
=⋅ ⋅
KDKKKD
KDKKKD
KDKKKD
(37)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
76
In an alternative way, expressions (37) can be
rewritten with respect to compliances and presented
as
()
()
()
1
11111
12 20 10 20 20 10 20
11111
23 30 20 30 30 20 30
11111
31 10 10 30 10 30 10
30
0
20
T
T
T
−−−−−
−−−−−
− −−− −
=++
=++
=++
KDKKKKKD
KDKKKKKD
K DKKKKKD
(38)
which are similar to expressions from electrical
engineering, where the resistance corresponds to the
compliance matrices and relevant transformation
equations from Y to Δ circuits are expressed as
follows.
10 20
12 10 20
30
20 30
23 20 30
10
30 10
31 10 30
20
RR
RRR
R
RR
RRR
R
RR
RRR
R
=++
=++
=++
(39)
where
12 23 31
,,RRR
are the Δ-circuit resistances and
10 20 30
,,RRR
are the resistances for the Y-circuit.
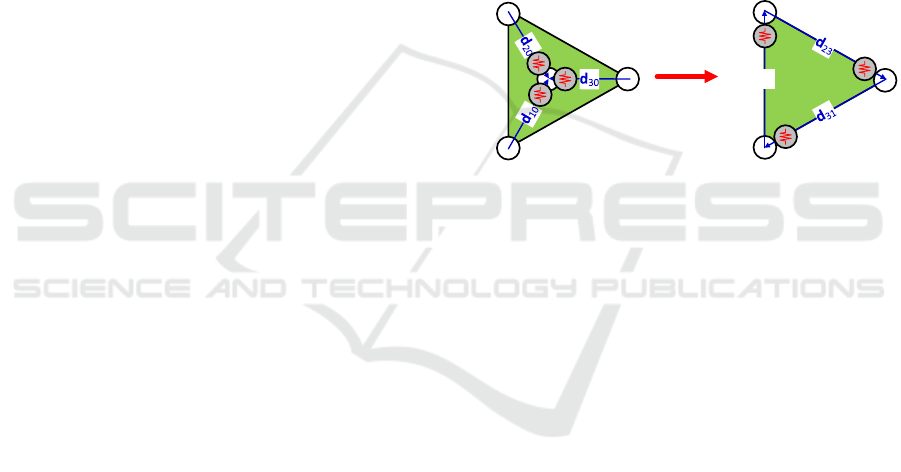
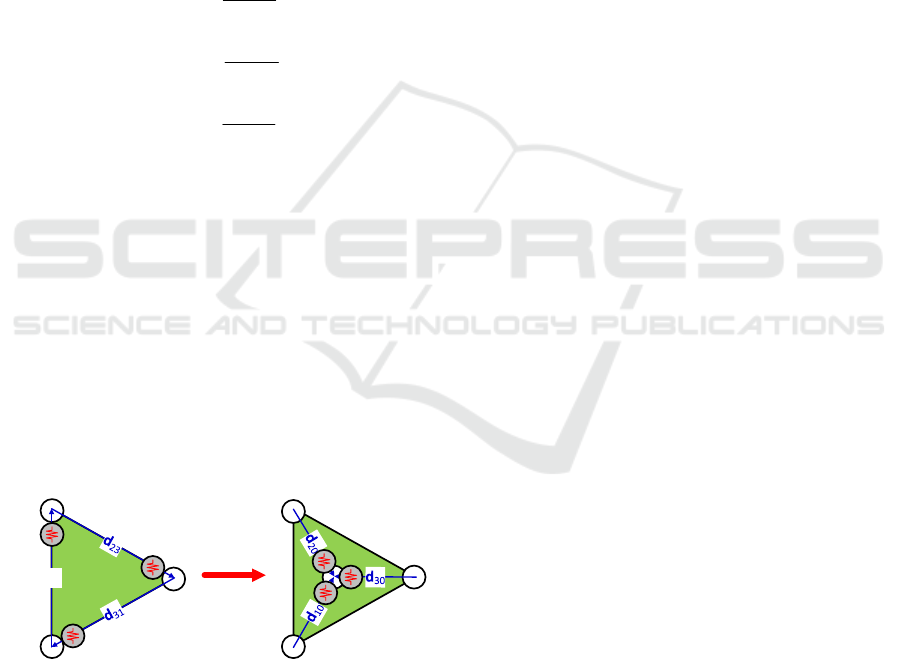
2.5 Transformation of Δ-Structure to
Equivalent Y-Structure
For the inverse transformation, for
YΔ→
transformation (see 0), let us consider the above-
derived equations (37) but solve them for
10 20 30
,,KKK. For convenience, these equations can
be rewritten as
2
3
1
0
2
3
1
K
30
K
10
K
20
K
12
K
23
K
31
d
12
Y -type model
Δ-type model
Figure 6: VJM-based Δ-Y transformation in the stiffness
models.
0
10 20 30
12
1
20 12 20 10 20
1
30 0030
10 20 31
23 30 20 30
1
10 31 10 0 30
()
()
()
T
T
T
−
−
−
=++
=++
=++
DKD K K K K K
DKD K K K K K
DKD K K K K K
(40)
and further transformed to.
10 20 30
10 20 3
11
10 20 12 20 20
11
20 3
0
02330 30
11
30 10 31 10
0
10 20 310
T
T
T
−−−
−−−
−−−
=++
=++
=++
KDKD K K K K
KDKDK K K K
KDKDK K K K
(41)
which yields the following equalities.
11 11
10 20 12 20 20 20 30 23 30 30
11 11
20 30 23 30 30 30 10 31 10 10
11 11
10 20 12 20 20 30 10 31 10 10
TT
TT
TT
−−− −−−
−−− −−−
−−− −−−
=
=
=
KDKD K KDKD K
KDKDK KDKDK
KDKD K KDKD K
(42)
Then, using the first and third relations, the symmetry
of the stiffness matrices
ij
K
as well as commutativity
of the above matrix products, and applying
transposition, one can get expressions
11 11
10 20 12 20 20 30 30 23 30 20
11 11
20 20 12 20 10 30 10 31 10 10
TT
TT
−−− −−−
−−− −−−
⋅= ⋅
⋅= ⋅
KDKD K KDKD K
KDKD K KDKD K
(43)
allowing the derivation of relations between
10 20 30
,,KKK as
11
10 20 12 20 30 23 30 30
11
20 20 12 20 10 31 10 30
TT
TT
−−−
−−−
=⋅
=⋅
KDKDDKDK
KDKDDKDK
(44)
Which using properties (10) can be further simplified
down to
1
10 20 12 23 23 30 30
1
20 20 12 21 31 10 30
TT
TT
−−
−−
=⋅
=⋅
KDKDKDK
KDKDKDK
(45)
Substituting these relations into the third relation of
the original system (41) and
11
0
1
20 12 21 31 10 30 30 23 30 30
1
20 12 23 23 30 30
1
20 12 21 31 1 0 303
TT T
TT
TT
−− − −−
−−
−−
⋅=
=⋅+
+⋅+
DKDKD KDKD K
DKDKD K
DKDKD K K
(46)
After executing relevant simplifications, one can
obtain the desired solution for the stiffness matrix
30
K in the form
30 10 31 10 30 23 30
11
30 23 30 20 12 20 10 31 10
TT
TTT−−−
=++
+⋅ ⋅
KDKDDKD
DKD DKD DKD
(47)
Which can also be presented as
000010
30 31 23 23 12 31
−
=++⋅⋅K K K KKK
(48)
which operates with the modified stiffness matrices
of Δ-structures
000
12 23 31
,,KKK
obtained from the
original once
12 23 31
,,KKK
by shifting the reference
point to node #0 in accordance with
Î
ˇ
T-Y Transformations in Manipulator’s Stiffness Analysis
77

0
12 20 12 20
0
23 30 23 30
0
31 10 31 10
T
T
T
=
=
=
KDKD
KDKD
KDKD
(49)
Let us now consider relations (1) and (2) in the system
(42), and using the symmetry of the stiffness matrices
ij
K
as well as the commutativity of the above matrix
products, and applying transposition, one can get the
following expressions
11 11
10 20 12 20 20 30 30 23 30 20
11 11
20 30 23 30 30 10 10 31 10 30
TT
TT
−−− −−−
−−− −−−
⋅= ⋅
⋅= ⋅
KDKD K KDKD K
KDKD K KDKD K
(50)
allowing the derivation of relations between
10 20 30
,,KKK as
11
30 30 23 30 20 12 20 10
11
20 30 23 30 10 31 10 10
TT
TT
−−−
−−−
=⋅
=⋅
KDKDDKDK
KDKDDKDK
(51)
Which using properties (10) can be further simplified
down to
1
30 30 23 32 12 20 10
1
20 30 23 31 31 10 10
TT
TT
−−
−−
=⋅
=⋅
K DKDKD K
KDKDKDK
(52)
Substituting these relations into the third relation of
the original system (41) and executing relevant
simplifications, one can obtain the desired solution
for the stiffness matrix
30
K in the form
10 20 12 20 10 31 10
11
10 31 10 30 23 30 20 12 20
TT
TTT−−−
=++
+⋅ ⋅
KDKDDKD
DKD DK D DKD
(53)
Which can also be presented as
000010
10 12 31 31 23 12
−
=++⋅⋅K KKKKK
(54)
In a similar way, the expressions can also be derived
for
20
K
20 30 23 30 20 12 20
11
20 12 20 10 31 10 30 23 30
TT
TTT−−−
=++
+⋅ ⋅
KDKDDKD
DKD DKD DKD
(55)
Or in the form
000010
20 23 12 12 31 23
−
=++⋅⋅KKKKKK
(56)
Hence, the final solution has the following
presentation
000010
10 12 31 31 23 12
000010
20 23 12 12 31 23
000010
30 31 23 23 12 31
−
−
−
=++⋅⋅
=++⋅⋅
=++⋅⋅
KKKKKK
KKKKKK
KKKKKK
(57)
Also, after relevant matrix transformations and
inversion of eq. (57), the desired solutions can be
presented with respect to the compliance
()
()
()
1
101010101 01
10 12 12 23 31 31
1
1 0 10 10 10 1 0 1
20 23 12 23 31 12
1
101010101 01
30 31 12 23 31 23
−
− −−−− −
−
−−−−− −
−
− −−−− −
=++
=++
=++
K KKKK K
KKKKK K
K KKKK K
(58)
Thus, the obtained expressions (37), (38), (57) and
(58) allow the transformation of the Y-type elastic
structure into the equivalent Δ-type one and vice
versa. They are similar to the scalar expressions from
electrical engineering.
12 31
10
12 23 31
12 23
20
12 23 31
23 31
30
12 23 31
RR
R
RRR
RR
R
RRR
RR
R
RRR
=
++
=
++
=
++
(59)
However, the expressions for stiffness
transformations are based on the
66×
matrix
operations and include additional components
ij
D
that take into account the geometry of the relevant
mechanical structure, although they can be excluded
if all stiffness matrices
ij
K
are presented with respect
to the node #0, i.e. in the form
0
ij
K
defined by eq.
(49). It is worth mentioning that for
YΔ→
transformations, the location of the node #0 can be
assigned arbitrarily. Besides, it should be noted that
because of the symmetry of the matrices
ij
K
and
0
ij
K
leading to commutativity of some matrix
products, one can obtain slightly different expressions
for equivalent stiffness/compliance matrices, which
are equal up to a transposition.
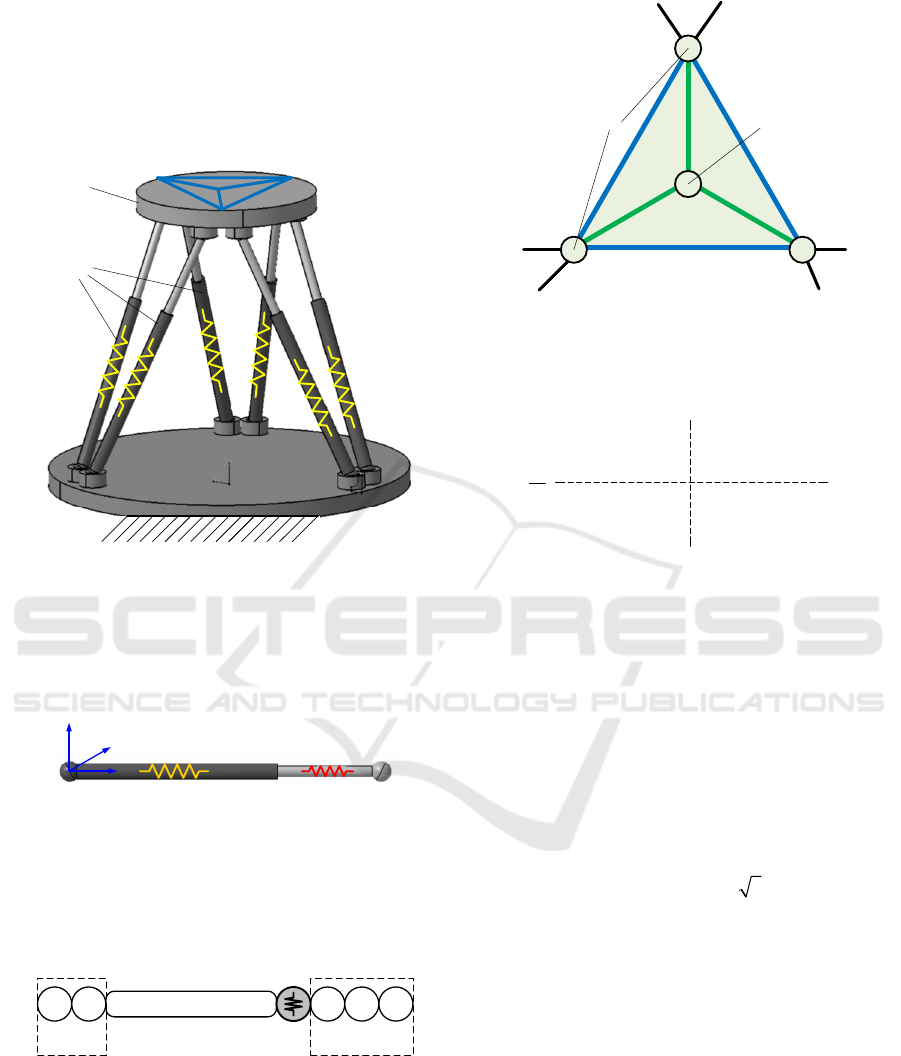
3 APPLICATION EXAMPLE
To demonstrate the value of the proposed technique,
let us apply it to the stiffness analysis of the Gough-
Stewart manipulator with a non-rigid mobile platform
(see 0). Legs’ stiffness modelling (0) does not create
any problems due to their strictly serial kinematics
(Klimchik
et al., 2012). However, due to the
platform's elasticity, the entire mechanism cannot be
presented as a serial-parallel structure, as is typically
considered in relevant works. In fact, the platform
contains multiple elastic cross-linkages that make it
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
78
impossible to handle within the frame of the
conventional VJM approach. However, using the
developed
YΔ→
transformation, one can obtain an
equivalent pure serial-parallel topology suitable for
stiffness modelling employing the VJM approach.
Elastic
platform
Elastic
Legs
Figure 7: Gough-Stewart platform with 3-3 connection.
The considered elastic platform consists of six
mutually connected elastic beams forming the frame,
as shown in 0. For each beam, the
66×
the stiffness
matrix is computed using the following expression
Rigid Link R
z
R
x
R
y
R
y
R
z
U-joint S-joint
6-d.o.f.
spring
x
z
y
U-joint
(passive)
S-joint
(passive)
{R
x
} {R
y
} {R
z
}
{R
y
}
{R
z
}
P-joint
(actuated)
{T
x
}
(b) VJM-based model of Gough-Stewart leg
(a) kinematic model of Gough-Stewart leg
Figure 8: VJM-based stiffness models for Gough-Stewart’s
leg.
Leg #1
Leg #2
Leg #3 Leg #4
Leg #5
Leg #6
Reference
point
Connection
joints
Figure 9: Gough-Stewart’s Δ+Y structure of mobile
platform.
2
44
2
2
3
0000 0
012 0 0 0 6
001206 0
00 0 0 0
006 04 0
06 00 04
zz
yy
beam
yy
zz
A
II
II
E
L
I
K
I
L
L
L
ILI
LL
L
−
=
−
K
(60)
where
2
44
(1 ) / 2KJL
υ
=+
, Young's modulus
E
and
Poisson's ratio coefficient
υ
describe beam’s elastic
properties, its geometry is described by length
L and
cross-section area
A, the variables I
y
, I
z
, and J are the
cross-section quadratic and polar moments of inertia.
For the considered example, it is assumed that
actuated legs are connected to the elastic platform at
the corners of the equilateral triangle with the edge
length
a
, while the reference point is located at the
triangle's centre. For such an arrangement, the lengths
of the links (1,2), (2,3) and (3,1) are equal to the
triangle parameter
a
and the lengths of the links
(1,0), (2,0) and (3,0) are
/3ba= . The remaining
parameters included in the matrix
beam
K are
computed as
2
/4Ad
π
=⋅
,
4
/64
yz
II d
π
==⋅
,
4
/32Jd
π
=⋅
, where d is the link diameter that is
assumed to have a circular cross-section.
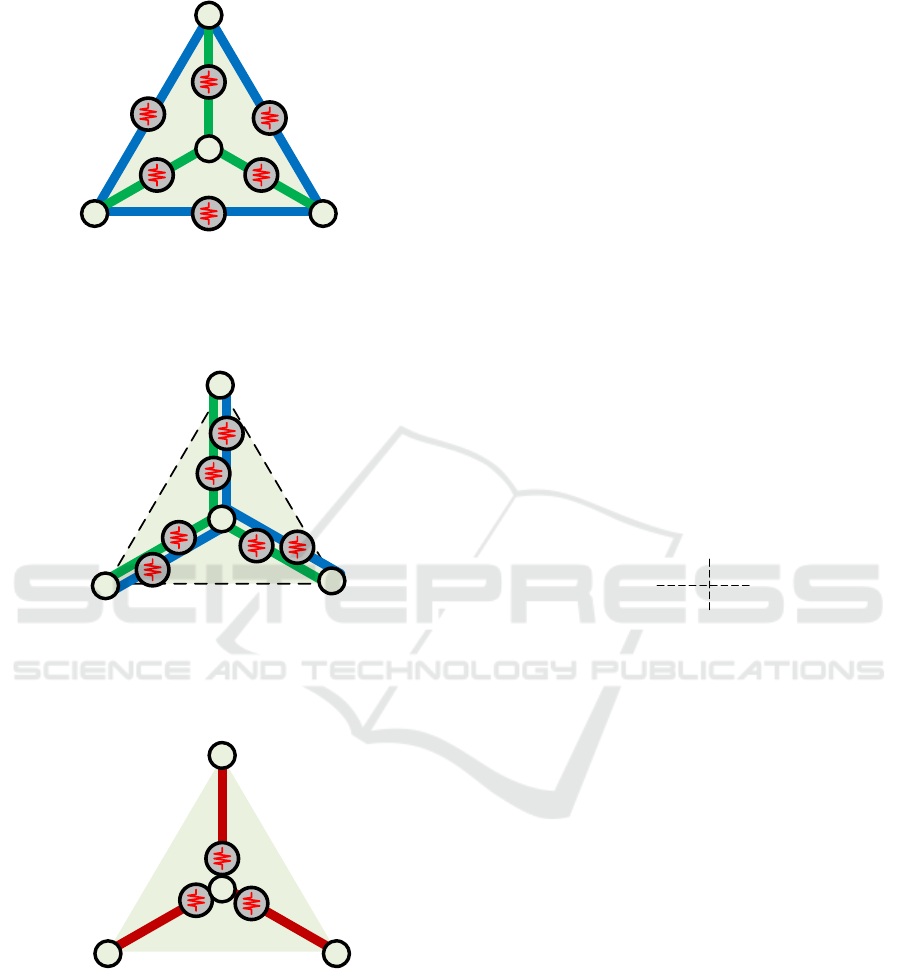
The original platform consisted of six mutually
connected elastic elements: three beams of length
a
and three beams of length
b (0a). After applying the
developed
YΔ→
transformation, the original
model is converted into an equivalent double-Y-
structure composed of six elements of length
b each
(0b). Then this double-Y-structure was transformed
into a classical Y-structure that can be easily handled
by the conventional VJM approach (0c).
Î
ˇ
T-Y Transformations in Manipulator’s Stiffness Analysis
79
2
31
0
d
30
d
20
3
3
1
1
2
2
0
0
10
′
K
10
′′
K
10
K
20
′′
K
30
′′
K
d
10
d
31
d
23
d
12
10
K
12
K
23
K
31
K
30
′
K
20
K
20
K
20
′
K
30
K
30
K
(a) Original structure of elastic
platform with cross-linkages
(b) Equivalent model for elastic
platform without cross-linkages
(c) Target equivalent Y-type
model for elastic platform
Figure 10: VJM-based stiffness models for the Δ-structure
and their parameters.
Using the developed
YΔ→
transformation, we can
compute
10 20 30
,,
′′′
KKK
as follows
000010
10 12 31 31 23 12
000010
20 23 12 12 31 23
000010
30 31 23 23 12 31
−
−
−
′
=++⋅⋅
′
=++⋅⋅
′
=++⋅⋅
KKKKKK
KKKKKK
KKKKKK
(61)
And then, considering the parallel connection of
10 20 30
,,KKK and
10 20 30
,,
′′′
KKK
get stiffness
matrices
10 20 30
,,
′′ ′′ ′′
KKK
as
10 10 10
20 20 20
30 30 30
′′ ′
=+
′′ ′
=+
′′ ′
=+
KKK
KKK
KKK
(62)
To obtain the stiffness model for the entire
manipulator, one can consider pairs of legs connected
in parallel and attached to the mobile platform, i.e. we
can write
() 1 2
10
() 3 4
10
() 5 6
10
leg
leg leg
leg
leg leg
leg
leg leg
=+
=+
=+
KKK
KKK
KKK
(63)
Where leg stiffness matrices
i
leg
K
can be computed
as follows (see (Klimchik
et al., 2025) for details)
33
11
33 33
T
i
ii
leg
K
×
××
⋅
=⋅
uu 0
K
00
(64)
where
11
/KLEA= is the leg stiffness on the
compression along the main axis and
i
u The unit
direction vectors specify the orientation of the leg.
To integrate the legs’ stiffness in the stiffness model
of the manipulator, we need to move
()leg
i
K
to the
zero node using the following transformations
0
(0) 10
10 10
2
10
(0) 20
20
(0) 30
300
20
330
T
i
T
T
leg leg
leg leg
leg leg
=
=
=
KK
KK
D
DKK
D
DD
D
(65)
Thus, the final Cartesian stiffness matrix for the
Gough-Stewart Platform can be computed as
()( )
()
(0) (0)
10 10 20 20
(0)
30 30
Cleg leg
leg
′′ ′′
=+ ++ +
′′
++
KKK KK
KK
(66)
Hence, this development expands the application
scope of the VJM method for over-constrained
parallel manipulators, where cross-linkages are
widely used to improve stiffness properties.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
80

4 CONCLUSIONS
This paper proposes a new stiffness model
transformation technique for modelling the elastic
behaviour of hybrid over-constrained robotic
manipulators with multiple cross-linkages. This
technique helps users address the critical limitation of
the VJM method. It provides an analytical expression
for equivalent transforming the cross-linkages into
serial-parallel structures suitable for the VJM.
To derive the desired transformations, the specific
MSA-based representation is employed, which uses a
conventional VJM-type
66×
virtual springs. This
helps to derive analytical relations between the
equivalent models. The main results were obtained
for 3-node structures, but they can be further
generalised for the n-node case. To demonstrate the
efficiency of the developed technique, Gough-
Stewart manipulator with elastic platforms and
compliant legs was considered.
ACKNOWLEDGEMENTS
This work was partly supported by French Agence
Nationale de la Recherche (ANR) under reference
ANR-23-CE10-0004-02' (project RAPHy).
REFERENCES
Blumberg, J., Li, Z., Besong, L. I., Polte, M., Buhl, J.,
Uhlmann, E. & Bambach, M. (2021). 26th International
Conference on Automation and Computing, pp. 1-6.
Deblaise, D., Hernot, X. & Maurine, P. (2006). IEEE
International Conference on Robotics and Automation
(ICRA 2006), pp. 4213-4219.
Detert, T. & Corves, B. (2017). New Advances in
Mechanisms, Mechanical Transmissions and Robotics,
edited by B. Corves, E.-C. Lovasz, M. Hüsing, I. Maniu
& C. Gruescu, pp. 299-310. Springer.
Gonzalez, M. K., Theissen, N. A., Barrios, A. & Archenti,
A. (2022). Robotics and Computer-Integrated
Manufacturing 76, 102305.
Görgülü, İ., Carbone, G. & Dede, M. İ. C. (2020).
Mechanism and Machine Theory 143, 103614.
Gosselin, C. & Zhang, D. (2002). International Journal of
Robotics and Automation 17, 17-27.
Hu, M., Wang, H. & Pan, X. (2019). 2019 IEEE
International Conference on Robotics and Biomimetics
(ROBIO), pp. 1653-1658.
Hussain, I., Albalasie, A., Awad, M. I., Tamizi, K., Niu, Z.,
Seneviratne, L. & Gan, D. (2021). IEEE Access 9,
118215-118231.
Kim, S. H. (2023). Journal of Manufacturing Processes 89,
142-149.
Kim, S. H. & Min, B.-K. (2020). International Journal of
Precision Engineering and Manufacturing 21, 1017-
1023.
Klimchik, A., Chablat, D. & Pashkevich, A. (2019). pp.
355-362. Cham: Springer International Publishing.
Klimchik, A., Pashkevich, A., Caro, S. & Chablat, D.
(2012). Robotics, IEEE Transactions on 28, 955-958.
Klimchik, A., Pashkevich, A., Caro, S. & Furet, B. (2017).
2017 IEEE International Conference on Advanced
Intelligent Mechatronics (AIM), pp. 285-290.
Klimchik, A., Pashkevich, A. & Chablat, D. (2018). 12TH
IFAC Symposium on robot control - SYROCO 2018.
Klimchik, A., Pashkevich, A. & Chablat, D. (2019).
Mechanism and Machine Theory 133, 365-394.
Klimchik, A., Pashkevich, A. & Chablat, D. (2025).
Stiffness Modeling of Parallel Robots: Springer.
Klimchik, A., Pashkevich, A., Chablat, D. & Hovland, G.
(2013). Robotics and Computer-Integrated
Manufacturing 29, 385-393.
Klimchik, A., Paul, E., Krishnaswamy, H. & Pashkevich,
A. (2024). 2024 10th International Conference on
Control, Decision and Information Technologies
(CoDIT), pp. 1897-1902.
Klimchik, A., Wu, Y., Dumas, C., Caro, S., Furet, B. &
Pashkevich, A. (2013). IEEE International Conference
on Robotics and Automation (ICRA) pp. 3707-3714.
Majou, F., Gosselin, C., Wenger, P. & Chablat, D. (2007).
Mechanism and Machine Theory 42, 296-311.
Nguyen, V. L., Kuo, C.-H. & Lin, P. T. (2022). Mechanism
and Machine Theory 170, 104717.
Pashkevich, A., Chablat, D. & Wenger, P. (2009).
Mechanism and Machine Theory 44, 966-982.
Pashkevich, A., Klimchik, A. & Chablat, D. (2011).
Mechanism and machine theory 46, 662-679.
Quennouelle, C. & Gosselin, C. á. (2008). Advances in
Robot Kinematics: Analysis and Design, pp. 331-341:
Springer.
Soares Júnior, G. D. L., Carvalho, J. C. M. & Gonçalves, R.
S. (2015). Robotica 34, 2368-2385.
Wu, K., Li, J., Zhao, H. & Zhong, Y. (2022). Applied
Sciences 12, 8719.
Yue, W., Liu, H. & Huang, T. (2022). Mechanism and
Machine Theory 175, 104941.
Zhao, W., Klimchik, A., Pashkevich, A. & Chablat, D.
(2022). Mechanism and Machine Theory 172, 104783.
Î
ˇ
T-Y Transformations in Manipulator’s Stiffness Analysis
81
