
Solving the Three-Dimensional Beacon Placement Problem Using
Constraint-Based Methods, Large Neighborhood Search, and
Evolutionary Algorithms
Sven L
¨
offler, Viktoria Abbenhaus, George Assaf and Petra Hofstedt
Department of Mathematics and Computer Science, MINT, Programming Languages and Compiler Construction Group,
Brandenburg University of Technology Cottbus-Senftenberg, Konrad-Wachsmann-Allee 5, Cottbus, Germany
fl
Keywords:
Beacon Placement, Constraint Programming, CSP, COP, Large Neighborhood Search, LNS, Evolutionary
Algorithms, Indoor Positioning, Optimization Algorithms, Decision Support Systems.
Abstract:
With the increasing prevalence of large building complexes, indoor localization is becoming an area of growing
significance. In critical situations, such as emergencies in factories or care facilities, the ability to locate a
person quickly can be a matter of life and death. One possibility for localization are Bluetooth beacons, which
are either attached to the person or in rooms. We pursue the latter approach, whereby the beacon signals are
used to determine the position of a receiving device, e.g. a mobile phone. At this, the use of a sufficient
number of beacons in the building must be ensured in order to guarantee adequate coverage. However, to
minimize costs, it is equally important to avoid placing unnecessary beacons. This creates a challenging
optimization problem that this paper addresses through three distinct approaches: constraint programming,
large neighborhood search, and evolutionary algorithms. Using simulated three-dimensional buildings, we
test and evaluate these methods, ultimately providing a practical and efficient approach applicable to real-
world building environments.
1 INTRODUCTION
Both in industrial settings, such as large factories,
and in private residential areas, including dormitories
and care facilities, increasingly large building com-
plexes are being constructed where people work, live,
and may also encounter emergencies. In such situa-
tions, it is critical to locate and assist individuals as
quickly as possible. A viable solution for indoor lo-
calization, which also respects individuals’ privacy,
is the use of Bluetooth beacons. However, to mini-
mize costs, it is essential to deploy the fewest num-
ber of beacons necessary. This creates a significant
optimization challenge, heavily influenced by the ar-
chitecture of the building. Factors such as wall and
window types and thickness, as well as room layouts
and sizes, affect the range of each beacon. For reliable
position detection using triangulation, every point in
the building must be covered by signals from at least
three beacons. This paper examines the challenges of
this problem and provides solutions tailored to diverse
building configurations.
Indoor localization has a wide range of applica-
tions, including indoor navigation, asset tracking, per-
sonnel monitoring, and more. Common techniques in
indoor positioning algorithms involve Bluetooth Low
Energy (BLE) beacons and signal strength measure-
ments, which are often used for triangulation, trilater-
ation, or proximity-based approaches (Sakpere et al.,
2017; Bembenik and Falcman, 2020). This article fo-
cuses on trilateration, a method for determining the
position of a point based on its distances to three ref-
erence points.
The optimal placement of beacons for trilateration
aims to minimize the number of beacons required (re-
ducing costs) while ensuring seamless coverage of the
space (triple signal coverage of all points). Currently,
beacon placement is often performed manually, which
is not only time-consuming but also prone to errors.
Despite extensive testing, manual methods provide
no guarantees of complete coverage across the entire
building nor certainty regarding the minimum or an
acceptably small number of beacons required.
Our novel approaches, based on constraint pro-
gramming (CP), large neighborhood search (LNS),
and evolutionary algorithms (EA), address this chal-
lenge by guaranteeing full coverage of all posi-
tions with a minimal number of beacons in three-
Löffler, S., Abbenhaus, V., Assaf, G. and Hofstedt, P.
Solving the Three-Dimensional Beacon Placement Problem Using Constraint-Based Methods, Large Neighborhood Search, and Evolutionary Algorithms.
DOI: 10.5220/0013724500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 105-116
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
105

dimensional buildings. By adopting a conservatively
chosen set of parameters, our methods ensure reliable
and efficient beacon placement while significantly re-
ducing the risks associated with manual approaches.
The remainder of this paper is organized as fol-
lows. Section 2 discusses various existing approaches
for beacon placement. Section 3 provides the foun-
dational concepts of constraint programming, large
neighborhood search, and evolutionary algorithms.
Section 4 describes the proposed methods for deter-
mining an optimized beacon placement. In Section 5,
the different approaches are evaluated in terms of their
applicability and quality across various generated test
buildings. Finally, Section 6 concludes the paper with
a summary of findings and an outlook on future work.
2 RELATED WORK
This section first discusses related work on the topic
of automatic beacon placement, followed by an exam-
ination of our previous research on 2D beacon place-
ment.
2.1 Automatic Beacon Placement
Numerous recent studies have focused on optimizing
beacon placement for indoor positioning, employing
a variety of approaches.
A key aspect of beacon placement is selecting
appropriate metrics to evaluate positioning accuracy.
The Geometric Dilution of Precision (GDOP), origi-
nally developed for satellite navigation systems, has
been successfully adapted for 5G mmWave networks
to optimize base station selection for positioning. In
(Rajagopal et al., 2016), GDOP was adapted for in-
door environments, leading to a significant reduction
in the number of beacons required compared to stan-
dard trilateration methods.
Another approach utilizes Time-of-Flight (ToF)
signals between beacons and target devices. (Wang
et al., 2019) investigates beacon position optimization
and proposes a greedy algorithm that initially places
O(OPT ln(m)) beacons. Additionally, a random sam-
pling algorithm is introduced, reducing the required
beacons to O(OPT ln(OPT )), resulting in fewer bea-
cons compared to earlier approaches.
The study by (McGuire et al., 2021) focuses on the
self-localization of autonomous vehicles using Angle-
of-Arrival (AoA) for position calculation, incorporat-
ing course angles. It presents the determinant of the
Fisher Information Matrix for an arbitrary number of
beacons and derives the optimal angular spacing for
three beacons through numerical simulations.
Another approach, proposed by (Sharma and
Badarla, 2018), treats the beacon placement area as
a grid of candidate positions on ceilings and walls. It
minimizes the total number of beacons while adhering
to GDOP constraints using Mixed Integer Linear Pro-
gramming (MILP). This method improves the mini-
mum GDOP without increasing the number of bea-
cons.
To our knowledge, no other work has imple-
mented a comparable constraint-programming-based
approach for beacon placement exclusively using
Boolean variables. Furthermore, known methods are
designed for two-dimensional spaces, whereas we
aim to extend these approaches to three-dimensional
environments. Transitioning to three-dimensional
space introduces a critical challenge: the lack of scal-
ability of certain algorithms. The addition of a third
dimension significantly increases the search space,
often preventing many algorithms from finding suffi-
ciently good solutions within acceptable timeframes.
2.2 Prior Work by the Authors
In this subsection, we present our previous contribu-
tions to the field of optimal beacon placement (L
¨
offler
et al., 2022). Our prior work has primarily focused on
constraint-based two-dimensional beacon placement
strategies, laying the foundation for the advancements
discussed in this paper.
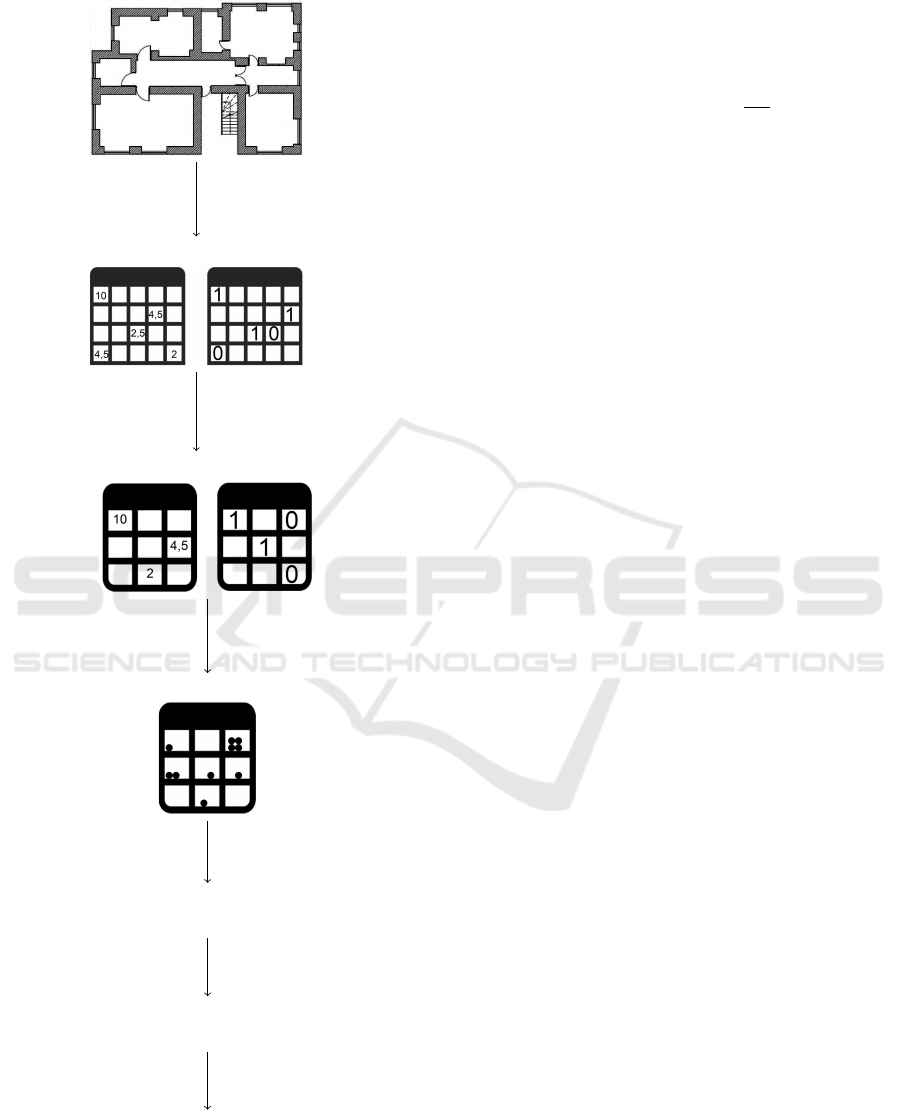
Figure 1 provides an overview of the approach
used to compute an optimal beacon placement as de-
scribed in (L
¨
offler et al., 2022). The process begins
by importing an image of a floor plan, which is then
preprocessed into two 2D arrays: an environmental
resistance array A
E
and a reachability array A
B
.
The environmental resistance array A
E
encodes
environmental factors E corresponding to materials in
the map. These factors were determined experimen-
tally as follows: E(open spaces) = 2, E(drywall) =
2.5, E(solid walls) = 4.5, and E(glass) = 10.
The reachability array A
B
is a Boolean array where
the entry at position (x, y) indicates whether the corre-
sponding location (x, y) must be triple-covered by the
beacons (True) or not (False). The latter case applies,
for instance, to areas outside the building or regions
blocked by thick walls.
In the next step, both arrays are scaled, aggregat-
ing the pixels of the original map into larger pixel
blocks. This process is performed conservatively,
meaning the aggregated pixel blocks adopt the maxi-
mum environmental resistance E of their constituent
pixels, and any block remains reachable if even one
of its original pixels was reachable.
Using an RSSI-based distance calculation (see
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
106
Map of the building
2-D env. resistance A
E
and reachability arrays A
B
Preprocessing
Scaled env. resistance A
s
E
and reachability arrays A
s
B
Different scalings s = 4, 5, 10, 15, ..., 54, 60
Beacon coverage set S
RSSI based range calculation
Scaled COP
COP construction
P = (X, D,C, min(numOfBeacons))
Optimized COP
COP refinements
P
opt
= (X, D,C, min(numOfBeacons))
Beacon positioning
COP solving
Figure 1: Overview of the beacon positioning process from
(L
¨
offler et al., 2022).
Equation 1, (Li et al., 2018)), the potential coverage
of a beacon placed at position (x, y) is determined.
Specifically, for each position (x, y), the set of all po-
sitions covered by a beacon at that location is calcu-
lated, forming a coverage set S.
distance = 10
M
1
−
RSSI
10∗E
(1)
Subsequently, a constraint optimization problem
(COP) P is formulated based on these coverage sets.
The COP P is then further optimized through var-
ious refinements to P
opt
for runtime efficiency and
solved globally to determine an optimal beacon place-
ment. Among these refinements, parallelization meth-
ods (parallel portfolio (R
´
egin and Malapert, 2018))
and the addition of extra constraints were considered.
Figure 2 depicts an example section of a floor plan
with scaled pixels overlaid. The different wall types
are represented by green (drywall with E=2.5), blue
(solid wall with E=4.5), and red (glass with E=10),
with varying wall thicknesses. These characteristics
result in different signal ranges for individual bea-
cons. Using the previously introduced method, the
original pixels are scaled into the defined scaled pix-
els. This means that any scaled pixel containing walls
is assigned the signal resistance value of the highest
resistance present within it. For example, the scaled
pixel in row 2 and column 3 contains free space (E =
2), a drywall (E = 2.5), and a glass wall (E = 10), re-
sulting in a scaled glass pixel with E = 10 (see Figure
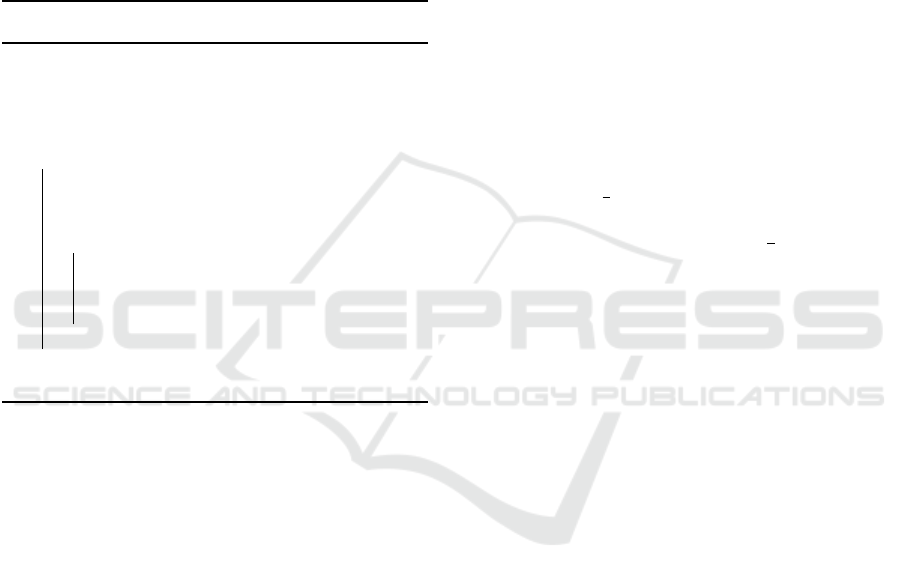
3). Additionally, the accessibility of the scaled pix-
els must be defined. In Figure 2, it is assumed that
areas containing walls are not required to be triple-
covered by beacon signals. However, in the scaled
version shown in Figure 3, this means that scaled pix-
els with at least one accessible original pixel must
remain accessible (Non-accessible areas are marked
with hatched patterns in the figure). An example of
such a pixel that must remain accessible, even if parts
of the original pixels are walls, is the pixel located in
row 2, column 3.
The scaled pixels, represented in the algorithm
process (see Figure 1) by the arrays A
S
E
and A
S
B
, serve
as the foundation for the subsequent constraint prob-
lem, which calculates the optimal beacon placement.
In Figure 3, multiple beacons (B) are shown, forming
part of a solution that ensures triple coverage of the
entire accessible building while minimizing the num-
ber of beacons used.
In (L
¨
offler et al., 2023), we introduced an alter-
native approach based on set variables to model and
solve the constraint problem. Compared to the ap-
proach presented in (L
¨
offler et al., 2022), this method
achieved solutions slightly faster but at the cost of re-
duced solution quality. Since the quality of the solu-
Solving the Three-Dimensional Beacon Placement Problem Using Constraint-Based Methods, Large Neighborhood Search, and
Evolutionary Algorithms
107
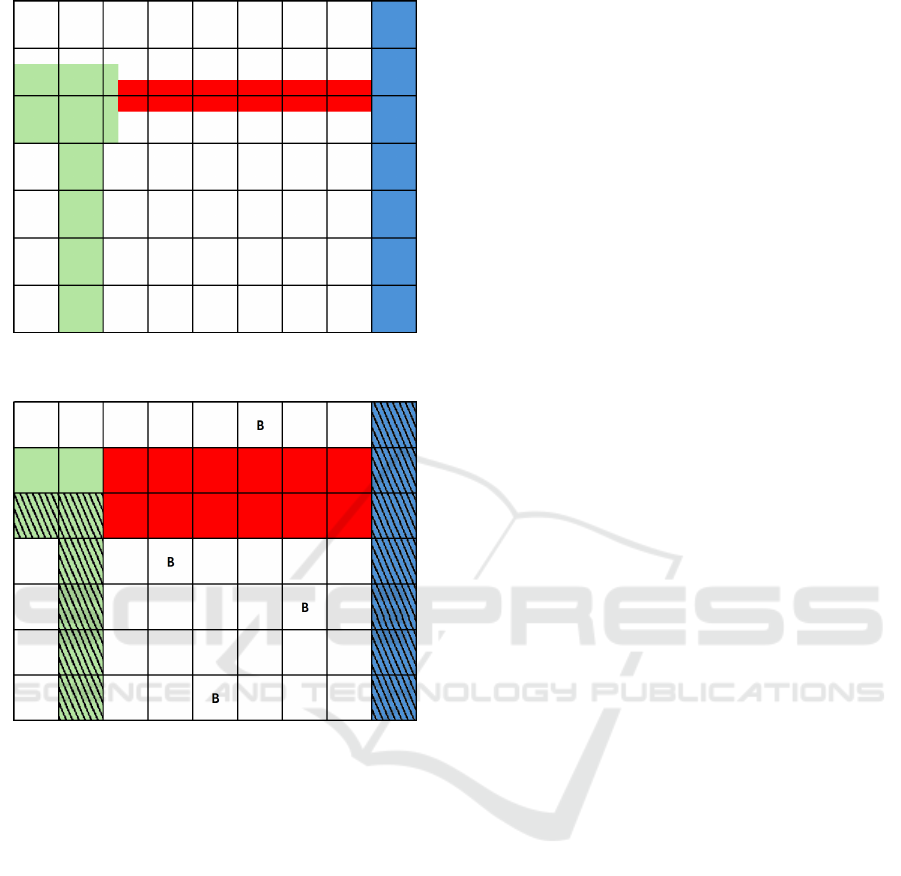
Figure 2: A section of a building floor plan for a single floor,
shown in top-down view, with a scaled pixel grid.
Figure 3: A scaled section of a building floor plan for a
single floor with a random distribution of beacons.
tion is of primary importance for our objectives, we
have decided to proceed with the finite-domain ap-
proach from (L
¨
offler et al., 2022) in the present work.
However, given the modular design of methodology
presented below, it could also be adapted to use the
set-variable-based approach if desired.
However, both methods are tailored to two-
dimensional spaces. Extending the approach to three-
dimensional spaces introduces significant challenges,
as the constraint model becomes excessively large and
computationally expensive. This paper addresses this
limitation by proposing novel methodologies that ef-
ficiently handle the increased complexity and scala-
bility requirements of three-dimensional spaces.
3 PRELIMINARIES
In this section, we provide an overview of the fun-
damental principles underlying Constraint Program-
ming, Large Neighborhood Search, and Evolutionary
Algorithms.
3.1 Constraint Prgramming
Constraint Programming (CP) is a powerful declar-
ative approach for modeling and solving NP-hard
problems. Common research domains in CP include
rostering, graph coloring, optimization, and satisfia-
bility problems (SAT) (Marriott, 1998). Using con-
straint programming, a global optimum can be found
and validated, which typically makes this approach
highly time-consuming. The general CP workflow
can be divided into two main components: 1. the
declarative respresentation as a constraint model, 2.
solving the constraint model using an independent
solver.
A Constraint Satisfaction Problem (CSP) is for-
mally represented as a triple P = (X, D,C), where:
X = {x
1
, x
2
, . . . , x
n
} is a set of variables, D =
{D
1
, D
2
, . . . , D
n
} is a set of finite domains, where D
i
is the domain of variable x
i
, and C = {c
1
, c
2
, . . . , c
m
}
is a set of constraints that may involve one or more
variables from X (Apt, 2003a). A constraint is a tuple
(X, R), where X is an ordered set of variables and R is
a relation defined over X (Dechter, 2003a).
A solution of a CSP is an instantiation of all vari-
ables x
i
with values d
j
∈ D
i
such that all constraints
are satisfied. A Constraint Optimization Problem
(COP) extends a CSP by introducing an objective
variable x
opt
, which must be either minimized or max-
imized.
For this work, a critical constraint is the count
constraint. The count(X, occ, v) constraint restricts
the variables in set X such that the value v occurs
exactly occ times (Demassey and Beldiceanu, 2024;
van Hoeve and Katriel, 2006). An example of the
count constraint is count({x
1
, x
2
, x
3
}, {1, 3}, 2) with
d
1
= d
2
= d
3
= {1, 2, 3}. In this case, the value 2
must appear exactly one or three times in the vari-
ables x
1
, x
2
, x
3
. Possible solutions include, for in-
stance, x
1
= 1, x
2
= 2, x
3
= 3 or x
1
= 2, x
2
= 2, x
3
= 2.
CSPs and COPs are typically solved using a back-
tracking search algorithm combined with constraint
propagation. Popular solvers for finite domain prob-
lems include Google OR-Tools (Perron and Furnon,
2023), Gecode (Christian Schulte, 2019), and Choco-
Solver (Prud’homme and Fages, 2022), with the lat-
ter being utilized in this work. For more detailed in-
formation on solvers and their mechanisms, see (Apt,
2003b; Dechter, 2003b; Rossi et al., 2006).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
108

3.2 Large Neighborhood Search
Large Neighborhood Search (LNS) was first intro-
duced in (Shaw, 1998) as a method for solving big
constraint problems. This approach involves destroy-
ing a significant portion of the variable assignments in
a given solution, followed by an optimization step to
repair the solution and potentially find a better one.
This approach can typically only determine locally
optimal solutions. The original work focuses on solv-
ing the Vehicle Routing Problem (VRP). In this pa-
per, we adapt the method for the optimal placement
of beacons.
The core idea behind the destruction phase is to
modify or remove parts of the current solution based
on a heuristic. In the context of a constraint problem,
this means reversing variable assignments, effectively
freeing those variables to take on new values from
their respective domains.
During the repair phase, the resulting partial struc-
ture is refined using an optimization technique, such
as constraint programming or local search methods.
The rationale is that the original CP model is often too
large and complex to be solved globally in a reason-
able amount of time. By partially destroying the com-
plete solution, a smaller subproblem is created that is
computationally more tractable. This subproblem can
then be solved to global optimality. However, solv-
ing the subproblem globally does not imply a global
solution to the original problem.
Through iterative cycles of destruction and repair,
the algorithm aims to escape local optima and pro-
gressively approach a global solution (without guar-
antee that this will be achieved). This strategy lever-
ages the balance between exploration and exploita-
tion, allowing the method to effectively navigate the
solution space.
3.3 Evolutionary Algorithms
Inspired by Darwin’s understanding of evolution
(Darwin, 1859), algorithms have been developed to
mimic this process computationally. The fundamen-
tal idea is that an environment can sustain only a lim-
ited number of individuals. However, each individual
possesses an inherent drive for reproduction, neces-
sitating a selection process based on the principle of
”survival of the fittest.”
Each individual represents a unique combination
of phenotypic traits, which are evaluated by the envi-
ronment. If this combination is favorable, the individ-
ual has a higher probability of producing offsprings.
Darwin’s key insight was that small, random varia-
tions (mutations in phenotypic traits) occur naturally
during reproduction, passing from one generation to
the next. Even though this approach allows for the
simultaneous consideration of multiple solutions, it
typically still results in only locally optimal solutions.
Algorithm 1: Evolutionary Algorithm.
Data: Population size n, crossover rate r
c
,
mutation rate r
m
, max generations g
Result: Best individual found during the
evolution process
1 P = generatePopulation(n)
2 for i = 1 to g do
3 P
′
= crossover(P, r
c
)
4 P
′
= mutate(P
′
, r
m
)
5 P = survivorSelection(P, P
′
, n)
6 end
7 return best(P)
Algorithm 1 outlines the procedure of an evolu-
tionary algorithm (Popyack, 2016). Initially, a pop-
ulation of n random individuals is generated (line 1).
As long as the maximum number of generations g has
not been reached (line 2), a crossover operation is per-
formed between two or more individuals, depending
on the crossover rate r
c
(line 3). Typically, individuals
with higher fitness values are preferentially selected
for crossover.
Following the crossover, the resulting offspring
undergo mutation based on the mutation rate r
m
,
which involves introducing random changes to cer-
tain values of an individual (line 4). This enhances
genetic diversity within the population.
Subsequently, the new population P is formed by
selecting the n fittest individuals from the combined
set of the current population P and the newly gener-
ated offspring P
′
(line 5). After g iterations, the algo-
rithm returns the best individual found (line 7).
Typical application areas of evolutionary algo-
rithms include optimization problems (Slowik and
Kwasnicka, 2020), such as finding optimal model pa-
rameters in machine learning (Shanthi and Chethan,
2023).
4 MODELING THE PROBLEM
In this section, we first describe our representation of
the three-dimensional space of buildings using pixels,
before discussing our various solution approaches.
Solving the Three-Dimensional Beacon Placement Problem Using Constraint-Based Methods, Large Neighborhood Search, and
Evolutionary Algorithms
109

4.1 Representation of the 3-D Space
In (L
¨
offler et al., 2022; L
¨
offler et al., 2023), we used
two-dimensional n × n pixels to represent the floor
plan of a single level. Each pixel was assigned one of
the values E = 2, 2.5, 4.5 or 10 to reflect the character-
istics of the floor plan. Larger pixel sizes led to more
pessimistic abstractions, as the worst value within a
pixel’s area was always assumed for the entire pixel.
Extending this representation into a three-
dimensional space by using n × n × n voxels is im-
practical. For instance, with a ceiling-plus-floor
height of h = 3 meters and a pixel side length of 10
cm, this would result in 30 stacked voxels per floor.
Consequently, the computation of coverage sets S,
i.e., the beacon ranges, would become significantly
more complex for even a single floor.
Unlike horizontal layouts, where walls can appear
at various positions, floors and ceilings are gener-
ally uniform in vertical structure. This implies the
presence of a solid ceiling (or floor) of thickness h
c
with E = 4.5 (solid wall), which does not need to be
reachable, and beneath it, a space of room height h
r
.
This space could be open (E = 2), contain a drywall
(E = 2.5), a solid wall (E = 4.5), or glass (E = 10),
among other possibilities.
To simplify vertical abstraction and considering
that the general beacon range significantly exceeds
the floor height h (room height h
r
plus ceiling thick-
ness h
c
), each pixel is assigned dimensions of n × n×
h with h = h
c
+h
r
. This allows us to compute the bea-
con coverage sets (S) for a single floor using the same
method as in the two-dimensional case. Coverage for
positions above and below the current floor is handled
by applying an offset to the RSSI calculation such that
E = 4.5 + h
c
∗ 0.01, and the distance is reduced by h.
This dynamic factor (0.01 per cm) accounts for ceil-
ing thickness h
c
, and was determined experimentally.
For floors farther above or below, both the dy-
namic attenuation factor (0.01 ∗ h
c
) and the base dis-
tance (e.g., 3 meters in this example) are incremen-
tally increased for each level. Based on our findings,
beacon signals can generally reach one floor above
and below, with limited coverage extending two floors
in both directions.
In conclusion, the space considered for coverage
calculations increases approximately fivefold, encom-
passing the current floor as well as the two above and
two below.
4.2 A Boolean Constraint-Based
Aproach
The constraint-based approach essentially follows the
method outlined in (L
¨
offler et al., 2022) and Figure 1.
The corresponding COP is illustrated in Figure 4.
For each potential position (i, j) where a beacon
can be placed, a Boolean variable x
i, j
is created, indi-
cating whether a beacon is placed at that position (1)
or not (0). The set X
S
i, j
⊆ X contains all variables cor-
responding to positions where a beacon can cover the
position (i, j). To enable trilateration, at least three
beacons must cover this position, as enforced by the
first count constraints c
1
.
To ensure minimal interference in trilateration,
two beacons must be placed at least 3 meters apart.
This requirement is captured by the second count con-
straints c
2
, which ensure that for all variables in X
3
i, j
,
representing a 3 m × 3 m neighborhood around (i, j),
at most one variable can take the value 1, meaning
only one beacon can be placed within this area.
The total number of beacons, denoted by the vari-
able x
count
, is determined using the constraint c
3
.
This is achieved by counting all occurrences of the
value 1 in X (i.e., all positions where a beacon is re-
quired). Finally, the counted beacons are minimized
(minimize(x
count
). The difference from the 2D model
lies in the beacon coverage sets S
i, j
, which now in-
clude not only positions on the same level but also
those up to two levels above and below.
Although this model is theoretically correct, it re-
veals significant memory limitations during the later
evaluation. This is due to the increase in size of the
count constraints c
2
, as the enlarged coverage sets S
i, j
span multiple levels, making the constraints too large
to handle within memory. Additionally, the over-
all solution speed is substantially reduced. Conse-
quently, this approach appears feasible only for very
large pixel sizes. However, using such large pixels
likely results in poor solution quality due to overly
pessimistic abstractions. For this reason, alternative
solution approaches were explored in the subsequent
sections.
4.3 A Large Neighborhood Search
Approach
As an initial attempt, we propose a randomized LNS
approach. This method begins by randomly position-
ing n =
p
(l ∗ w) beacons on each floor of the build-
ing, where l and w represent the length and width (in
meter) of the building, respectively.
Next, we use the repair algorithm presented in
Algorithm 2 to extend this initial placement B into
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
110

P = (X , D,C, f ) with:
X = {x
i, j
| ∀i ∈ {1, ..., n}, j ∈ {1, ..., m}} ∪ {x
count
}, (one variable for each position (i, j) in the n × m map)
D = {D
i, j
= {0, 1} | ∀i ∈ {1, ...,n}, j ∈ {1, ..., m}} ∪ (at position (i, j) is a beacon (1) or not (0))
{D
count
= {3, ...,n ∗ m}} (maximal number of beacons is between 3 and n ∗ m)
C = c
1
= {count(X
S
i, j
, [3, 4, ..., |X
S
i, j
|], 1) | ∀i ∈ {1, ..., n}, j ∈ {1, ..., m}} ∪
(every position (i, j) is covered by at least 3 beacons)
c
2
= {count(X
3
i, j
, [0, 1] , 1) | ∀i ∈ {1, ..., n}, j ∈ {1, ..., m}}
(every two beacons have at least a distance of 3 meter)
c
3
= {count(X, x
count
, 1) | ∀i ∈ {1, ..., n}, j ∈ {1, ..., m}} (count the used beacons)
minimize(x
count
)!
Figure 4: The COP which represents the beacon positioning problem.
one that ensures the entire building is covered three-
fold. For this purpose, the coverage of all points in
the space is calculated based on the placed beacons,
and the set of points S
not
is determined, representing
all points that are not yet covered by at least three
beacons (line 1). Additional beacons are randomly
placed at the positions corresponding to some of the
points in S
not
until all points are covered by at least
three beacons (lines 2 to 5). Once this condition is
met, the necessity of each beacon is evaluated. For
every beacon, the points it covers are analyzed to de-
termine the minimum number of beacons covering all
these points (line 6). If this minimum value exceeds
three, the beacon is considered unnecessary, as its re-
moval would still ensure that all positions remain cov-
ered threefold. Subsequently, unnecessary beacons
with highest such value are randomly removed one
at a time until no such beacons remain (lines 7 to 10).
This process results in an initial feasible solution.
Algorithm 2: Repair
Data: An incomplete beacon placement B,
The scaled environment array A
s
E
.
Result: A possible beacon placement B
1 S
not
= calculateNotCovered(B, A
s
E
)
2 while (|S
not
| > 0) do
3 B = placeRandomBeacon(A
s
E
, S
not
)
4 S
not
= calculateNotCovered(B, A
s
E
)
5 end
6 S
ToMany
= calculateUnnecessary(B, A
s
E
)
7 while (S
ToMany
> 0) do
8 B = removeRandomly(B, S
ToMany
)
9 S
ToMany
= calculateUnnecessary(B, A
s
E
)
10 end
11 return B
After generating this initial solution, the LNS pro-
cess begins. The method iteratively destroys and re-
pairs the existing solution until a predefined time limit
is reached. Once the time limit expires, the best so-
lution found during the process is returned. To de-
stroy a solution, one-fifth of the beacons in the cur-
rent beacon placement B are randomly removed. The
repair step is then performed using the previously in-
troduced repair Algorithm 2.
This approach combines random decisions (such
as determining which beacons to place or specifically
remove) with a greedy strategy, where unnecessary
beacons are removed in order of least necessity. Com-
pared to the constraint-based approach described in
the previous Section 4.2, it is not necessary to com-
pute all possible beacon coverages for every point, but
only those that have been placed during the process.
This results in significant savings in both computa-
tion time and memory usage, but it also means that
the obtained solution is not guaranteed to be globally
optimal. However, given the problem size, it can be
assumed that the constraint model would also fail to
find a globally optimal solution within an acceptable
time frame.
During the development of the approach, the idea
arose that it might be more advantageous to start
not with a random placement of beacons, but with
a beacon positioning uniformly distributed across the
space. Due to the varying wall types and thicknesses,
such an even distribution does not guarantee that the
entire space is triple-covered. Consequently, a repair
process is initially invoked from this starting config-
uration, which first randomly completes the solution
and then removes redundant beacons randomly. Sub-
sequently, the procedure continues with the same de-
stroy and repair behavior as the purely random LNS
approach. In Section 5, this method will be compared
to the completely random approach.
Solving the Three-Dimensional Beacon Placement Problem Using Constraint-Based Methods, Large Neighborhood Search, and
Evolutionary Algorithms
111
4.4 A Constraint-Based LNS Approach
Once both a constraint-based and an LNS approach
for finding an optimal beacon placement were estab-
lished, the next logical step was to investigate whether
these two methods could be combined. Since the
combination, due to LNS, no longer retains a global
search characteristic, solving the problem as a single
COP appears unnecessary. Instead, it was decided
to generate a separate COP for each floor and solve
them sequentially from the bottom to the top, whereby
passing on partial solutions (see Algorithm 3).
Algorithm 3: An inital level-based beacon place-
ment.
Data: The scaled environment array A
s
E
,
number of floors h
Result: A possible beacon placement B
1 B = empty()
2 for (int i = 1 to h) do
3 B = solveCOP(B, i, A
s
E
)
4 S
ToMany
= calculateUnnecessary(B, A
s
E
)
5 while (S
ToMany
> 0) do
6 B = removeRandomly(B, S
ToMany
)
7 S
ToMany
=
calculateUnnecessary(B, A
s
E
)
8 end
9 end
10 return B
The placements of beacons calculated for the
lower floors are considered given when solving for the
higher floors (line 3). This means that a position on
an upper floor may already be singly, doubly, or even
multiply covered by one or more beacons placed on
lower floors. Consequently, the requirement for fur-
ther coverage is reduced to 2, 1, or even 0. Once the
placements for the current floor are added to B (line
3), any now superfluous beacons are removed. This
could also include beacons on lower floors that have
become obsolete due to the placement of beacons on
higher floors (lines 4–8). This approach mirrors the
one used within the repair method outlined in Algo-
rithm 2.
After generating an initial solution, this solution
is iteratively destroyed and repaired until a time limit
is reached. In this destruction phase, a single level
(floor) is selected, and all beacon placements on
that level are removed. The repair function then
places new beacons on the selected level using the
constraint-level-based method from line 3 of Algo-
rithm 3. Subsequently, any newly unnecessary bea-
cons are removed (lines 4-8). When the time limit is
reached, the best solution found so far is returned.
This method is not global but incorporates the op-
timal planning of a single floor, which is then utilized
in a greedy manner. It is hypothesized that this ap-
proach will yield better solutions than the entirely ran-
dom LNS approach discussed in the previous section.
Another way to combine the two approaches is to
determine the initial placement using the constraint-
level-based method, and then refine this placement us-
ing the randomized LNS approach presented in Sec-
tion 4.3. This ensures that the initial solution has
a certain level of quality and is not entirely ran-
dom, while also allowing subsequent placements to
be computed faster based on the simpler calculation
as descriped in Section 4.3.
4.5 Evolutionary Algorithms
Finally, we consider evolutionary algorithms, as pre-
sented in Algorithm 1. For the generation of the ini-
tial population,
3
4
of the individuals are created com-
pletely randomly (as described in the very beginning
of Section 4.3), while the remaining
1
4
are evenly dis-
tributed across a single level with random completion,
as outlined at the end of Section 4.3. Each individual
represents a solution to the beacon placement prob-
lem. This means that all constraints, particularly the
coverage constraints, are satisfied; however, the num-
ber of beacons may still be significantly above the
minimum. After generating the initial population, it
is iteratively updated until the time limit is reached.
The crossover operation is performed as follows:
First, all individuals are weighted based on the inverse
of the number of beacons they use. Two individuals,
A and B, are then randomly selected with probabilities
proportional to their weights (i.e., the fewer beacons
they use, the higher their probability of selection). For
each level, it is determined, again based on the num-
ber of beacons used on that level, whether the level
is inherited from individual A or B (the fewer beacons
on a level, the higher the likelihood it is selected). It is
ensured that at least one level from each individual A
and B is included. The resulting beacon placement is
then randomly completed and reduced with the repair
method as described in Section 4.3.
Following the crossover, there is a 50% chance of
a mutation. The mutation process mimics the destroy-
and-repair cycle used in the LNS variant (see Section
4.3): 20% of the beacons are randomly removed, and
new beacons are added until all positions are covered
threefold. The solution is then reduced to the mini-
mum necessary beacons.
The newly formed population is reduced using a
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
112

fitness function (selecting individuals with the lowest
number of beacons), ensuring that only the fittest in-
dividuals survive. This new population is then used
for further crossover operations. The entire process is
repeated until the time limit is reached, at which point
the best solution found so far is returned.
5 EVALUATION
This section begins by detailing the experimental
setup, followed by an evaluation and discussion of
the results obtained from the different solving ap-
proaches.
5.1 The Experimental Setup
All experiments were conducted on an LG Gram lap-
top equipped with an Intel(R) Core(TM) i7-1165G7
11th-generation quad-core processor clocked at 2.80
GHz and 16 GB DDR3 RAM operating at 2803 MHz.
The system ran Microsoft Windows 10 Enterprise.
The programming language used was Java with JDK
Version 17.0.7, alongside the ChocoSolver Version
4.10.7 as constraint solver (Prud’homme and Fages,
2022).
For the evaluation, we generated random building
layouts. The number of floors h ∈ {3, 5, 7} as well as
the width and length w, l ∈ {30 m, 40 m, 50 m} were
randomly selected. On each floor, 25 walls were ran-
domly placed with random thicknesses between 25
cm and 60 cm, and with random types (drywall, mas-
sive wall, glass). While this approach does not neces-
sarily produce realistic building layouts, it generates
diverse resistance profiles for the Bluetooth beacons,
similar to those encountered in real buildings, which
is the key aspect of the problem being addressed.
We applied the various methods introduced in
Section 4 to determine optimal beacon placements for
the randomly generated buildings. In addition to the
different methods, we also tested various resolutions
(pixel sizes). Larger pixel sizes simplify the computa-
tions due to the reduced number of pixels. However,
this may lead to lower solution quality, as the pixel
values are calculated pessimistically (always taking
the highest resistance value within the pixel, even if
only part of the pixel exhibits this resistance). Not
all methods could be applied to all scaling levels for
every building, due to hardware limitations.
We used the following naming convention for our
approaches: A
s
represents the approach A ∈ {COP,
LNS-R, LNS-U, LNS-COP, LNS-COP-R, EA} and
pixel size s ∈ {5, 10, 20, 25, 40, 50, 75, 100}. COP
refers to the pure COP approach from Section 4.2.
LNS-R is the randomized LNS approach discussed in
Section 4.3. LNS-U denotes the LNS variant starting
with a uniform distribution of beacons (also Section
4.3). LNS-COP describes the level-based LNS ap-
proach using constraint programming, as introduced
in Section 4.4. LNS-COP-R refers to the creation
of an initial solution using the level-based constraint
programming approach from Section 4.4, followed by
refinement using the randomized LNS approach from
Section 4.3 for further solution processing. EA de-
scribes the application of an evolutionary algorithm,
as detailed in Section 4.5. A time limit of 10 minutes
was applied to all approaches.
5.2 Results and Evaluation
Table 1 summarizes the results of our test series. It
includes the six different solution approaches (COP,
LNS-R, LNS-U, LNS-COP, LNS-COP-R, EA) with
different scalings (s ∈ {5, 10, 20, 25, 40, 50, 75, 100})
and presents, in various columns, the percentages of
instances for which at least one solution was found
(Solvable), the number of instances where the ob-
tained solution was optimal compared to the other ap-
proaches (#Best), and the average number of beacons
needed for the best solution (#Beacons). The sum
of the ”Best” entries (31) exceeds the total number
of test instances (29). This is because if two meth-
ods achieve equally optimal solutions (with the same
number of beacons), both are credited with an incre-
ment in the ”Best” value.
Figure 5 focuses on the new approaches and visu-
alizes the success probability (black marker for each
approach) and the number of required beacons (bar
for each approach) from Table 1.
Initially, the pixel sizes s ∈
{5, 10, 20, 25, 50, 75, 100} were planned. How-
ever, it quickly became apparent that the COP,
LNS-COP, and LNS-COP-R instances could not find
solutions for s = 25 or smaller. Consequently, these
instances were excluded from the table. Instead, a
value of s < 50 was sought where the instances were
at least partially solvable, leading to the inclusion of
s = 40 for these cases. For EA, the scalings s = 10
and s = 5 were also omitted. This is because such
fine-grained scalings result in too few individuals
being generated to justify labeling the method as an
EA algorithm. Therefore, s = 20 was chosen as the
smallest pixel size for EA.
It is evident that the original COP approach from
(L
¨
offler et al., 2022) performs reliably with large pixel
sizes (100 cm × 100 cm), achieving a 100% solv-
ability rate. However, it performs poorly due to the
imposed time limit, requiring an average of 825 bea-
Solving the Three-Dimensional Beacon Placement Problem Using Constraint-Based Methods, Large Neighborhood Search, and
Evolutionary Algorithms
113

Table 1: A comparison of the results between the different
solution approaches for 29 different buildings.
Approach Solvable #Best #Beacons
COP
100
100% 0 825
COP
75
89.7% 0 1320
COP
50
93.1% 0 1582
COP
40
96.5% 0 1596
LNS-R
100
100% 0 206
LNS-R
75
100% 0 217
LNS-R
50
100% 0 221
LNS-R
25
100% 0 221
LNS-R
20
100% 0 219
LNS-R
10
100% 0 207
LNS-R
5
100% 2 175
LNS-U
100
100% 0 205
LNS-U
75
100% 0 217
LNS-U
50
100% 0 221
LNS-U
25
100% 0 227
LNS-U
20
100% 0 223
LNS-U
10
100% 0 213
LNS-U
5
100% 0 184
LNS-COP
100
93.1% 21 167
LNS-COP
75
93.1% 5 167
LNS-COP
50
27.6% 2 142
LNS-COP
40
41.4% 0 175
LNS-COP-R
100
93.1% 1 173
LNS-COP-R
75
93.1% 0 173
LNS-COP-R
50
27.6% 0 144
LNS-COP-R
40
41.4% 0 176
EA
100
100% 0 188
EA
75
100% 0 201
EA
50
100% 0 207
EA
25
100% 0 211
EA
20
100% 0 208
cons. Even though, with unlimited time, a globally
optimal solution could theoretically be found. Using
smaller pixel sizes results in some instances becom-
ing unsolvable within the 10-minute time limit or due
to memory constraints. Specifically, instances with
pixel sizes smaller than 40 cm × 40 cm could not be
solved using this approach.
On the other hand, as the pixel size decreases, the
number of required beacons increases significantly
(e.g., to 1,596 for s = 40). This increase is attributable
to the vast size of the search space, of which only a
small fraction can be explored. Despite employing a
global-based constraint approach, this method fails to
yield a satisfactory or globally optimal solution within
an acceptable timeframe.
The randomized LNS approach LNS-R intro-
duced in Section 4.3 significantly outperforms the
original constraint-based approach, yielding substan-
tially better solutions (averaging between 175 and 221
beacons) while consistently solving all tested pixel
sizes (s ranging from 5 to 100) with a 100% solvabil-
ity rate.
It can be observed that larger pixel sizes (s = 100)
initially produce better solutions than medium-sized
pixels (s = 50), while very small pixel sizes (s = 5)
ultimately yield the best solutions. Notably, this ap-
proach achieves the best solution twice across all
compared methods (#Best).
This behavior can be explained as follows: with
larger pixel sizes, the search space is smaller, en-
abling a broader exploration of possible solutions.
As the pixel size decreases, the search space grows
larger. However, the pessimistic approximations in-
herent to smaller pixels become less pronounced.
Consequently, while fewer solutions can be found
in larger search spaces, these solutions are less pes-
simistic and potentially better than those derived from
larger pixel sizes.
The analysis indicates that the balance between
pixel size and pessimistic approximation works best
for small pixel sizes, followed by large pixel sizes,
with medium sizes performing the least effectively.
The approach employing an initial uniform distri-
bution of beacons (LNS-U) did not lead to any sig-
nificant improvement. For large pixel sizes, no no-
table difference between LNS-U and LNS-R is ob-
served. However, as the pixel size decreases, LNS-U
performs increasingly worse compared to LNS-R.
Both level-based LNS approaches using constraint
programming (i.e. LNS-COP and LNS-COP-R), as
introduced in Section 4.4, do not always find a solu-
tion (solvability ranging from 27.6% to 93.1%). How-
ever, for the problems that are solved, the number of
required beacons is notably low (142 to 176 on aver-
age). The averages of 144 and 142 beacons for LNS-
COP-R
50
and LNS-COP
50
, respectively, should be in-
terpreted with caution, as these approaches could only
solve approximately one-quarter of the instances. It
is likely that these instances represent the easier prob-
lems, which require fewer beacons.
In general, approaches with larger pixel sizes
are preferable due to their higher solvability rates.
Among these, the fully constraint-based LNS ap-
proach (LNS-COP) consistently outperforms the
hybrid approach (LNS-COP-R), in which the search
begins with a constraint-based solution and then
transitions to a randomized search (fewer beacons are
required across all tested scenarios).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
114
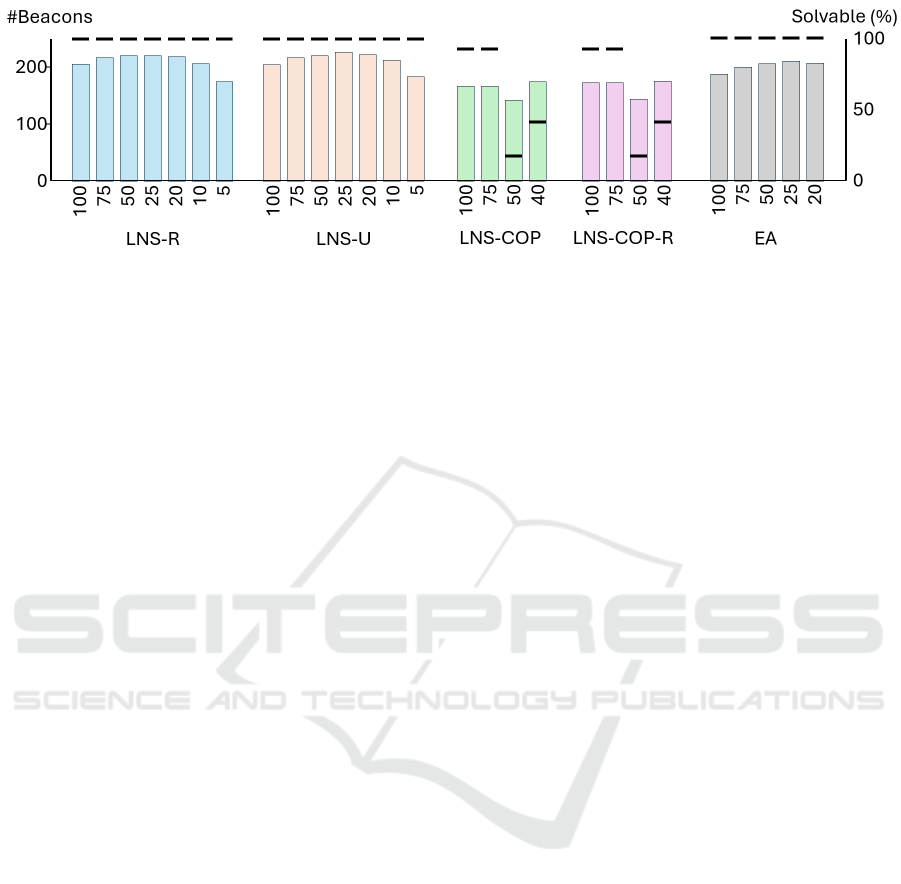
Figure 5: A visual comparison of the success probability of the different approaches and their required number of beacons.
The inability of the LNS-COP approaches to al-
ways find a solution, as compared to COP
100
, is at-
tributed to the division of computational time across
different floors. Each level was allocated only 1
minute to find a solution so that ultimately some time
remains for the destroy and repair process. If any
floor fails to find a solution within the time limit,
the entire problem remains unsolved. In contrast, the
COP
100
approach tackled the entire problem as a sin-
gle instance, benefiting from the full 10-minute run-
time. It is anticipated that the performance of the
LNS-COP approaches would significantly improve
with increased computational time, enabling them to
solve a greater number of problem instances.
The most promising approach overall is LNS-
COP
100
, which delivered the best solution across all
compared methods and resolutions in 21 out of 29
cases. On the other hand, it solves only 27 out of
29 instances, indicating that this approach should be
used in parallel with a robust method capable of con-
sistently finding a solution.
The evolutionary algorithm consistently finds a
solution (solvability of 100%), unlike the constraint-
based approaches. However, the solutions produced
by this method sometimes require more beacons than
the randomized LNS approach (LNS-R) and always
require more beacons than the hybrid constraint-
randomized approach (LNS-COP-R) and the LNS
constraint-based approach (LNS-COP). Interestingly,
the algorithm tends to perform best for the largest
pixel sizes, yielding the most efficient solutions in
those cases.
In conclusion, both the LNS-R and EA methods
reliably produce high-quality solutions and signifi-
cantly outperform the original constraint-based ap-
proach. However, the LNS-COP
100
method emerged
as the most effective, achieving the best solution in
21 out of 29 cases. For practical applications, a par-
allel portfolio approach (R
´
egin and Malapert, 2018)
combining these three methods (LNS-R
5
, EA
100
, and
LNS-COP
100
) is recommended. This combination
ensures that a high-quality solution can always be
found.
6 CONCLUSION AND FUTURE
WORK
In this work, we investigated various approaches
to solving the beacon placement problem in three-
dimensional spaces. These included a pure constraint-
based approach (COP), a randomized LNS method
with (LNS-U) and without (LNS-R) uniform ini-
tial beacon placement, two constraint-based LNS
approaches with either random (LNS-COP-R) or
constraint-based continuation (LNS-COP) for further
solution exploration, and an evolutionary algorithm
(EA). All newly developed methods significantly
outperformed the original pure constraint-based ap-
proach, thereby enabling the practical application
of these techniques to real-world, multi-level, large-
scale buildings.
Among the proposed methods, the constraint-
based LNS approach appears particularly promis-
ing, as it often delivers high-quality solutions. Fu-
ture work will focus on advancing all the methods
presented here. Specifically, the development of
problem-specific search strategies for the constraint-
based LNS approaches seems especially promising.
As demonstrated in other problem domains (L
¨
offler
et al., 2024), such strategies can often expedite the
discovery of an initial solution. Additionally, integrat-
ing the constraint-based LNS with local search tech-
niques, as outlined in (L
¨
offler and Hofstedt, 2024),
holds great potential. Such an integration would al-
low leveraging the solutions from other methods (e.g.,
LNS, EA) as starting points for the constraint-based
LNS, potentially enhancing both efficiency and solu-
tion quality.
Solving the Three-Dimensional Beacon Placement Problem Using Constraint-Based Methods, Large Neighborhood Search, and
Evolutionary Algorithms
115

REFERENCES
Apt, K. (2003a). Constraint satisfaction problems: exam-
ples. In (Apt, 2003b). Chapter 2.
Apt, K. (2003b). Principles of Constraint Programming.
Cambridge University Press, New York, NY, USA.
Bembenik, R. and Falcman, K. (2020). BLE indoor po-
sitioning system using rssi-based trilateration. J.
Wirel. Mob. Networks Ubiquitous Comput. Depend-
able Appl., 11(3):50–69.
Christian Schulte, Mikael Lagerkvist, G. T. (2019). Gecode
6.2.0, 2019, https://www.gecode.org/, last visited
2019-11-22.
Darwin, C. (1859). On the Origin of Species by Means of
Natural Selection. Murray, London. or the Preserva-
tion of Favored Races in the Struggle for Life.
Dechter, R. (2003a). Constraint networks. In (Dechter,
2003b), chapter 2, pages 25–49.
Dechter, R. (2003b). Constraint processing. Elsevier Mor-
gan Kaufmann, San Francisco, CA 94104-3205, USA.
Demassey, S. and Beldiceanu, N. (2024). Global Constraint
Catalog. http://sofdem.github.io/gccat/. last visited
2025-05-27.
Li, G., Geng, E., Ye, Z., Xu, Y., Lin, J., and Pang, Y. (2018).
Indoor positioning algorithm based on the improved
rssi distance model. Sensors, 18:2820.
L
¨
offler, S., Becker, I., B
¨
uckert, C., and Hofstedt, P. (2023).
Enhanced optimal beacon placement for indoor posi-
tioning: A set variable based constraint programming
approach. In Gini, G., Nijmeijer, H., and Filev, D. P.,
editors, Proceedings of the 20th International Con-
ference on Informatics in Control, Automation and
Robotics, ICINCO 2023, Rome, Italy, November 13-
15, 2023, Volume 1, pages 70–79. SCITEPRESS.
L
¨
offler, S., Becker, I., and Hofstedt, P. (2024). Enhancing
constraint optimization problems with greedy search
and clustering: A focus on the traveling salesman
problem. In Rocha, A. P., Steels, L., and van den
Herik, H. J., editors, Proceedings of the 16th Inter-
national Conference on Agents and Artificial Intelli-
gence, ICAART 2024, Volume 3, Rome, Italy, Febru-
ary 24-26, 2024, pages 1170–1178. SCITEPRESS.
L
¨
offler, S. and Hofstedt, P. (2024). A constraint-based
greedy-local-global search for the warehouse location
problem. In Maglogiannis, I., Iliadis, L. S., MacIn-
tyre, J., Avlonitis, M., and Papaleonidas, A., editors,
Artificial Intelligence Applications and Innovations -
20th IFIP WG 12.5 International Conference, AIAI
2024, Corfu, Greece, June 27-30, 2024, Proceedings,
Part III, volume 713 of IFIP Advances in Informa-
tion and Communication Technology, pages 291–304.
Springer.
L
¨
offler, S., Kroll, F., Becker, I., and Hofstedt, P. (2022). Op-
timal beacon placement for indoor positioning using
constraint programming. In 19th IEEE/ACS Interna-
tional Conference on Computer Systems and Applica-
tions, AICCSA 2022, December 5-8, 2022, pages 1–8,
Abu Dhabi, United Arab Emirates. IEEE.
Marriott, K. (1998). Programming with Constraints - An
Introduction. MIT Press, Cambridge.
McGuire, J., Law, Y. W., Chahl, J., and Do
˘
ganc¸ay,
K. (2021). Optimal beacon placement for self-
localization using three beacon bearings. Symmetry,
13(1).
Perron, L. and Furnon, V. (2023). Google
LLC, Google OR-Tools, 2023.
https://developers.google.com/optimization/, last
visited 2025-06-11.
Popyack, J. L. (2016). Gusz eiben and jim smith (eds): In-
troduction to evolutionary computing - springer, 2015,
299 pp, ISBN: 978-3-662-44874-8. Genet. Program.
Evolvable Mach., 17(2):197–199.
Prud’homme, C. and Fages, J. (2022). Choco-solver: A java
library for constraint programming. J. Open Source
Softw., 7(78):4708.
Rajagopal, N., Chayapathy, S., Sinopoli, B., and Rowe, A.
(2016). Beacon placement for range-based indoor lo-
calization. In 2016 International Conference on In-
door Positioning and Indoor Navigation (IPIN), pages
1–8.
R
´
egin, J. and Malapert, A. (2018). Parallel constraint pro-
gramming. In Hamadi, Y. and Sais, L., editors, Hand-
book of Parallel Constraint Reasoning, pages 337–
379. Springer.
Rossi, F., Beek, P. v., and Walsh, T. (2006). Handbook of
Constraint Programming. Elsevier, Amsterdam, First
edition.
Sakpere, W., Oshin, M. A., and Mlitwa, N. B. (2017). A
state-of-the-art survey of indoor positioning and navi-
gation systems and technologies. South Afr. Comput.
J., 29(3).
Shanthi, D. L. and Chethan, N. (2023). Genetic algorithm
based hyper-parameter tuning to improve the perfor-
mance of machine learning models. SN Comput. Sci.,
4(2):119.
Sharma, R. and Badarla, V. (2018). Geometrical optimiza-
tion of a novel beacon placement strategy for 3d in-
door localization. In 2018 IEEE International Confer-
ence on Advanced Networks and Telecommunications
Systems (ANTS), pages 1–6.
Shaw, P. (1998). Using constraint programming and local
search methods to solve vehicle routing problems. In
Maher, M. and Puget, J.-F., editors, Principles and
Practice of Constraint Programming — CP98, pages
417–431, Berlin, Heidelberg. Springer Berlin Heidel-
berg.
Slowik, A. and Kwasnicka, H. (2020). Evolutionary algo-
rithms and their applications to engineering problems.
Neural Comput. Appl., 32(16):12363–12379.
van Hoeve, W.-J. and Katriel, I. (2006). Global Constraints.
In (Rossi et al., 2006), First edition. Chapter 6.
Wang, H., Rajagopal, N., Rowe, A., Sinopoli, B., and
Gao, J. (2019). Efficient beacon placement algorithms
for time-of-flight indoor localization. In Proceedings
of the 27th ACM SIGSPATIAL International Confer-
ence on Advances in Geographic Information Sys-
tems, Chicago, IL, USA, November 5-8, pages 119–
128.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
116
