
Towards Machine Learning Driven Virtual Sensors for Smart Water
Infrastructure
Vineeth Maruvada
a
, Karamjit Kaur
b
, Matt Selway
c
and Markus Stumptner
d
Industrial AI, University of South Australia, Adelaide, Australia
Keywords:
Virtual Sensors, Digital Twins, Water Infrastructure, Artificial Intelligence, Machine Learning, Deep
Learning, Long Short Term Memory, XGBoost, Generative Adversarial Networks, Industry 4.0, Water
Utilities.
Abstract:
Water utilities around the world are under increasing pressure from climate change, urban expansion, and ag-
ing infrastructure. To address these challenges, smarter and more sustainable water management solutions are
essential. This study explores the use of Machine Learning (ML) to develop Virtual Sensors for smart water
infrastructure. Virtual Sensors can complement or replace physical sensors while improving environmental
sustainability and enabling reliable and cost-effective Digital Twins (DTs). Our experimental results show
that several ML models outperform traditional methods such as Auto-Regressive Integrated Moving Average
(ARIMA) in terms of forecast accuracy and timeliness. Among these, Extreme Gradient Boosting (XGBoost)
and Long Short-Term Memory (LSTM) offer the best balance between accuracy and robustness. This research
provides preliminary evidence that ML models can enable Virtual Sensors capable of delivering short-term
forecasts. When successfully implemented, Virtual Sensors can transform water utilities by improving envi-
ronmental sustainability, operational intelligence, adaptability, and resilience within Digital Twins.
1 INTRODUCTION
Water is essential for public health, economic devel-
opment, and long-term sustainability of cities. How-
ever, modern water utilities face mounting challenges
including climate change, rapid population growth,
and aging asset infrastructure, resulting in more fre-
quent asset failures, leaks, bursts, and network over-
flows. This requires an intelligent and proactive ap-
proach to water management (Arnell et al., 2019).
To address these challenges, utilities need to imple-
ment smarter water infrastructure systems that en-
able early leak detection, accurate demand forecast-
ing, and predictive maintenance to minimize service
interruptions.
Physical sensors play an important role as they
generate data to efficiently operate water networks.
When these data are integrated with Digital Twin
(DT), these sensors form the foundation of smart wa-
ter management, allowing real-time monitoring, sim-
a
https://orcid.org/0000-0001-6644-8834
b
https://orcid.org/0000-0003-0255-1060
c
https://orcid.org/0000-0001-6220-6352
d
https://orcid.org/0000-0002-7125-3289
ulation of dynamic scenarios, and data-driven deci-
sion making (Zekri et al., 2022). However, deploying
and maintaining a dense network of physical sensors
can be prohibitively expensive and technically chal-
lenging, especially when the infrastructure is remote
or distributed. Sensor failures and data loss can dis-
rupt network and DT performance, compromising the
utility’s ability to effectively model and manage water
resources.
Artificial Intelligence (AI), and specifically Ma-
chine Learning (ML) and Deep Learning (DL), offers
a promising solution to mitigate sensor-related disrup-
tions. By learning patterns from historical data, these
models can estimate missing or faulty sensor read-
ings, effectively functioning as virtual or soft sensors
(Ibrahim et al., 2020). These virtual sensors ensure
data continuity when physical sensors fail or provide
unreliable readings, thus enhancing the resilience and
operational reliability of DT systems. Although pre-
vious studies have explored various approaches to de-
velop virtual sensors, there is still a need for system-
atic evaluation of ML methods for the water indus-
try under real-world operational conditions (Martin
et al., 2021). This study aims to fill this gap by bench-
marking multiple ML models with statistical methods
Maruvada, V., Kaur, K., Selway, M. and Stumptner, M.
Towards Machine Learning Driven Virtual Sensors for Smart Water Infrastructure.
DOI: 10.5220/0013721200003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 453-460
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
453

to assess their accuracy in replicating physical sensor
measurements.
We evaluated the performance of ML models such
as XGBoost, LSTM, TadGAN, TSGAN, known for
their strong predictive capabilities, and compared
them with traditional statistical approaches such as
ARIMA. The objective is to assess whether these
models can accurately estimate sensor values when
physical readings are missing, incomplete, or noisy.
Preliminary experiments were conducted using both
single-step and multi-step time series forecasting
methods. The multi-step results exhibited reduced
predictive performance over extended horizons which
is consistent recent research highlighting error accu-
mulation in ML-based forecasting models (Marcjasz
et al., 2023). Given their limited reliability and scope,
multi-step results are not included in this study.
The structure of this paper is as follows: Section 2
reviews Virtual Sensor approaches and research gaps;
Section 3 details the Methodology; Section 4 presents
Results and Analysis; Section 5 discusses conclusion
and future work. To begin, we provide an overview
of existing literature to contextualize the development
and application of Virtual Sensors and identify key
gaps that motivate this study.
2 LITERATURE REVIEW
The following literature review covers the concept of
Virtual Sensors, their taxonomy, and concludes by
identifying research gaps.
2.1 Virtual Sensors
Virtual Sensors are models that estimate variables that
are hard or expensive to measure directly (Kadlec
et al., 2009). This approach supports the Industry 4.0
vision of adaptive and resilient systems. As shown
in Figure 1, Virtual Sensors combine physical sen-
sor data with ML output to mimic real-world sys-
tems within DTs. This enables continuous monitoring
and decision making, even when physical sensors fail,
helping to build adaptive DTs (Berglund et al., 2023;
Zahedi et al., 2024; Shen et al., 2022).
2.2 Taxonomy of Virtual Sensor Models
Based on established practices in industrial systems,
environmental monitoring, and recent developments
in DTs, virtual sensor implementations fall into the
following three broad categories:
• First-Principles Models: Based on system
physics or chemistry. Includes:
Figure 1: Virtual sensor integration in a water infrastructure
digital twin estimating missing or failed sensor values using
historical data.
– Physics-Based Models use equations based on
physical laws to model sensor behavior.
– State Observer-Based Models that estimate sys-
tem states using known dynamics
• Data-Driven Models: Rely entirely on observed
data.
– Statistical Techniques: Linear Regression, Par-
tial Least Squares (PLS), Gaussian Process Re-
gression (GPR)
– Stochastic Models: Kalman filters, Markov
models, Bayesian networks
– ML/DL Models: XGBoost, LSTM, CNN,
SVM, and GANs
• Hybrid Models:
– Physics-Informed Neural Networks (PINNs):
Embeds physical laws into neural network
training
– Other Approaches: Grey-box models, residual
learning, and combinations of physical and ML
methods.
This categorization is consistent with several key
studies in the field (Martin et al., 2021; Weichert
et al., 2019; Psichogios and Ungar, 1992; Karni-
adakis et al., 2021; Gonz
´
alez-Herb
´
on et al., 2025),
which recognize the spectrum of approaches based on
model transparency, data availability, and computa-
tional complexity.
Earlier virtual sensor models were based on first-
principles methods such as hydraulic equations and
state observers, which required domain expertise that
often struggled with non-linear or complex systems
(Martin et al., 2021; Weichert et al., 2019). To address
these limitations, data-driven approaches were devel-
oped. Techniques like PLS, Kalman Filters, and GPR
showed promise but they do not scale well with large
datasets (Rasmussen and Williams, 2006). Recent
advances in ML and DL, including Random Forests,
SVMs, CNNs, and LSTMs, enable modeling of non-
linear patterns and temporal dependencies (Han et al.,
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
454

2021; Zhao et al., 2022). Hybrid techniques are a
new and evolving area; methods like PINNs combine
physical laws with learning algorithms improve both
accuracy and interpretability. However, they may in-
troduce additional training and computational com-
plexity (Karniadakis et al., 2021). While these ad-
vances have expanded the capabilities of virtual sen-
sors, they also reveal persistent limitations that hinder
robust deployment in real-world systems.
2.3 Current Challenges and Research
Gaps
Despite advancements in physics-based and statisti-
cal modeling methods such as ARIMA, Kalman Fil-
ters, and GPR, they often struggle with the dynamic,
nonlinear, and nonstationary characteristics of real-
world water management. These models typically
lack scalability and adaptability, particularly when
dealing with high-frequency, multi-sensor data or un-
der conditions of sensor failure (Ibrahim et al., 2020;
Berglund et al., 2023). Such limitations hinder the de-
velopment of reliable DT systems, leading to subop-
timal forecasting and inefficient water resource man-
agement.
To address these gaps, this study evaluates ML
models, specifically XGBoost, LSTM, and GAN vari-
ants. By benchmarking them against ARIMA, we as-
sess their ability to provide accurate forecasts. These
results align with recent research highlighting the po-
tential of ML in forecasting, anomaly detection, and
operational optimization of smart water infrastruc-
ture. Furthermore, the integration of virtual sen-
sors within IoT-enabled DT frameworks offers a scal-
able, adaptive, and cost-effective approach to monitor
the water infrastructure in real time (Lakshmikantha
et al., 2022), ultimately supporting more resilient and
intelligent water management.
3 METHODOLOGY
The following section outlines data collection from
physical sensors, the preprocessing steps, and the
modeling workflow. It also details the evaluation ap-
proach used to assess the performance of various ML
techniques.
3.1 Datasets and Preprocessing
This study uses two publicly available real operational
datasets collected from flow sensors installed along
the Murray River. The first dataset, from sample point
403241, captures significant variations in flow pat-
terns and includes daily measurements from 1 July
2022 to 30 June 2023. The second dataset, from sam-
ple point 403242, represents a smaller and more stable
system with daily data that span a longer period, from
1 July 2014 to 30 June 2023.
The raw datasets initially contained several at-
tributes, including Sample Point, Description, Lati-
tude, Longitude, SampleDate, Flow Category, Flow,
and Comment. To ensure consistency and relevance,
the data were preprocessed by removing non-essential
fields such as Description, Latitude, Longitude, and
Comment. Only records where the Flow Category
was set to ‘FLOW’ were retained. The datasets were
then reformatted into a standardized structure with
three key fields: SensorID, DateTime, and FlowRate.
By selecting two contrasting datasets, one with
dynamic and complex flow behavior and the other
with stable operational patterns, this study helps to
provide a meaningful comparison of ML techniques
under different flow scenarios. We used a univari-
ate forecasting approach that uses historical FlowRate
data as input variable.
MinMax Scaling. In univariate time-series fore-
casting, normalization of the input series is crucial
for stable and efficient training. We applied Min-
Max scaling to the FlowRate series to map all histor-
ical values to a fixed range, ensuring that the model
learns temporal patterns without being influenced by
the magnitude of the raw values.
MinMax scaling transforms each observed value
y
t
in the series {y
1
, y
2
, . . . , y
T
} to a normalized value
y
′
t
within the range [0, 1] using the following:
y
′
t
=
y
t
− y
min
y
max
− y
min
, ∀t ∈ {1, . . . , T } (1)
where y
min
= min{y
1
, y
2
, . . . , y
T
} and y
max
=
max{y
1
, y
2
, . . . , y
T
} represent the minimum and
maximum flow values observed during training.
This operation is a linear rescaling that preserves
temporal dependencies while bounding the values to
a consistent scale.
Scaling of the data improves the numerical stabil-
ity of gradient-based models and helps mitigate issues
such as vanishing or exploding gradients. Moreover,
it ensures that lagged inputs contribute proportionally
during the learning process, allowing the model to fo-
cus on sequence patterns rather than absolute magni-
tudes (Han et al., 2011).
3.2 Feature Engineering
The main feature used for all forecasting models was
FlowRate. Although the raw data included additional
Towards Machine Learning Driven Virtual Sensors for Smart Water Infrastructure
455

attributes such as SensorID and DateTime, the focus
was on univariate forecasting, meaning that only past
FlowRate values were used as input to predict future
values. However, DateTime were used to engineer
lagged time steps and sliding windows for training the
models. These derived features were not used as in-
puts and to generate sequences of past FlowRate val-
ues to forecast the next. This approach allowed for
consistent time alignment and ensured temporal con-
tinuity across the datasets.
All models were trained using a one-step-ahead
forecasting setup, where the next FlowRate value
is predicted based on a fixed window of previous
FlowRate readings. This method supports real-time
model updates and is suitable for operational scenar-
ios. Although only univariate inputs wsd used for
this study, the architecture allows future extension
to multivariate forecasting using engineered features
like day-of-week, seasonal indicators, or additional
sensor readings. Table 1 highlights the key model spe-
cific configurations used to reduce prediction errors.
3.3 Model Development
This study implements five forecasting models:
ARIMA, LSTM, XGBoost, TadGAN, and TSGAN.
The following section describes the architecture, un-
derlying algorithms, and key hyperparameter config-
urations used for each model.
3.3.1 ARIMA
The AutoRegressive Integrated Moving Average
(ARIMA) model is a classical statistical approach for
time-series forecasting. It captures linear dependen-
cies in data using a combination of autoregressive
terms, differencing operations, and moving averages.
ARIMA uses a walk-forward validation strategy, re-
training at each time step using newly available ob-
servations, making it suitable for real-time forecast-
ing scenarios, although it requires careful parameter
tuning for high-frequency or long-horizon tasks. In
this study, ARIMA is used as a statistical baseline to
evaluate the performance of more recent ML models.
Its transparent structure and interpretability provide a
valuable reference point for assessing the applicabil-
ity of data-driven approaches in the context of virtual
sensor development (Box et al., 2015).
3.3.2 XGBoost
Extreme Gradient Boosting (XGBoost) is a high-
performance ensemble learning algorithm known for
its scalability and predictive accuracy in structured
Algorithm 1: Unified forecasting procedure for ARIMA,
XGBoost, LSTM, TadGAN, and TSGAN.
Data: Preprocessed time-series y
Result: Predicted flow values on the test set
Split y into training and test sets chronologically
ARIMA: begin
Initialize history and parameters (p, d, q)
For each t in test set : fit model, forecast next
value ˆy
t
, Store ˆy
t
in predictions, append y
t
to his-
tory
end
XGBoost: begin
Generate lag, rolling, and date features
Define hyperparameter search space; Con-
duct randomized search with time-series cross-
validation
Train XGBoost regressor on training data using
selected hyper-parameters as per Table 1.
end
LSTM: begin
Create sequences with sliding window T; re-
shape as (samples, T, 1)
Define, compile and train the model with se-
lected hyper-parameters as per Table 1.
end
TadGAN: begin
Created windowed sequences; Define Generator:
LSTM Encoder-Decoder with Repeat Vector
Define Critic: Conv1D + Flatten + Dense
Compile model using selected hyper-parameters
as per Table 1.
end
TSGAN: begin
Created windowed sequences; Define Generator:
LSTM Encoder-Decoder with Dropout layers
Define Discriminator: Conv1D + Dense + Sig-
moid
Compile model using selected hyper-parameters
as per Table 1.
end
Train model and predict test values
Inverse scale predictions and test values
datasets. XGBoost operates by using sliding win-
dows of past observations to predict future values for
time series forecasting. It constructs additive regres-
sion trees through gradient boosting, allowing it to
model nonlinear dependencies. Its built-in regulariza-
tion mechanisms help mitigate overfitting, making it
a reliable choice for complex time-series forecasting
tasks (Chen and Guestrin, 2016).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
456
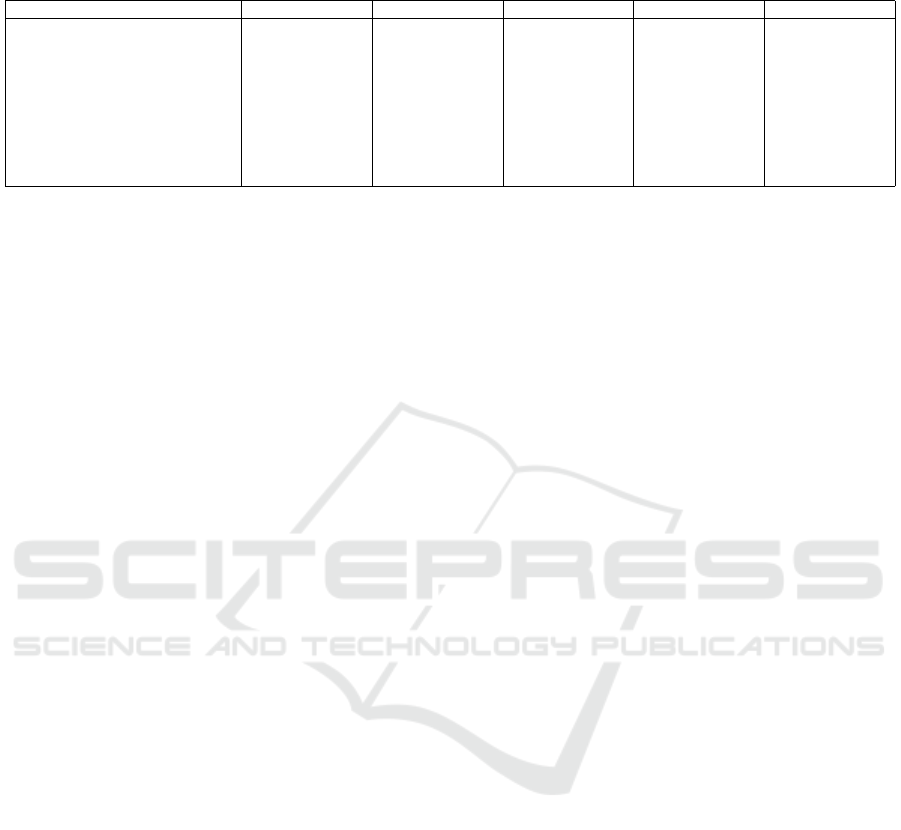
Table 1: Key hyperparameter settings used for each forecasting model in this study. The settings were selected through
validation or adapted from prior work to ensure fair comparison.
Hyperparameter ARIMA XGBoost LSTM TSGAN TadGAN
Order / Estimators / Layers (2,1,2) 100 LSTM Layers - 2,
Units - 50; Dense
Layers - 20, Units - 25,
1
LSTM encoder (128,
64)-decoder (64,128)
LSTM encoder (100,
50)-decoder (50,100)
Learning rate — 0.1 0.001 — —
Optimizer — — Adam Adam Adam
Epochs — — 400 400 50
Batch size — — 170 170 32
Input time steps (Window size T) — — 30 30 30
Loss function MSE MSE MSE Binary Crossentropy Binary Crossentropy
3.3.3 LSTM
Long Short-Term Memory (LSTM) networks, a spe-
cialized type of recurrent neural network (RNN), are
designed to capture long-range temporal dependen-
cies and mitigate the vanishing gradient problem.
This makes them particularly effective for modeling
sequential patterns in univariate flow rate data. In
our implementation, the LSTM model used a fixed
input window, referred to as the timestep, to predict
the next time step’s value. This one-step-ahead fore-
casting framework ensures stable training. Multi-step
forecasting would require either recursive predictions
or a sequence-to-sequence architecture to extend the
output horizon (Hochreiter and Schmidhuber, 1997).
3.3.4 TadGAN
Time-series Anomaly Detection GAN (TadGAN) is
designed for unsupervised anomaly detection in time-
series data using a GAN architecture with an LSTM-
based generator and discriminator. It learns to re-
construct normal patterns in sequential data; anoma-
lies are identified when reconstruction errors exceed
a threshold (Geiger et al., 2020). Although, its not a
forecasting model, TadGAN can support virtual sen-
sor systems by identifying data inconsistencies or po-
tential faults in real-time monitoring streams.
3.3.5 TSGAN
Time-series GAN (TSGAN) is a generative model tai-
lored for time-series forecasting and synthetic data
generation. By learning temporal dependencies, it
produces realistic one-step-ahead predictions that can
be used to fill in missing values or simulate sensor
readings (Smith and Smith, 2020). This makes TS-
GAN particularly valuable for virtual sensors, where
maintaining the continuity and plausibility of the
measurements is essential for downstream analytics
and decision-making.
3.4 Experimental Setup
All experiments were carried out within the Azure
Machine Learning Studio environment using the in-
tegrated notebook interface for code execution, data
handling, and model evaluation. Each forecasting
model was implemented in a dedicated Jupyter note-
book and organized by model type (e.g., ARIMA,
XGBoost, LSTM, GAN). These notebooks were sys-
tematically named to reflect the dataset version and
forecasting type, such as single-step or multi-step pre-
dictions. Data preprocessing, training, evaluation,
and visualization of results were all performed within
these notebooks to ensure reproducibility and consis-
tency between models.
Libraries and Model Configuration. A
range of libraries supported model development:
statsmodels was used for ARIMA; scikit-learn
and XGBoost were used for ensemble learning; and
TensorFlow/Keras powered deep learning models
including LSTM, TadGAN, and TSGAN. Additional
packages such as pandas, NumPy, matplotlib, and
seaborn facilitated data transformation and visual-
ization. Hyperparameter tuning followed best prac-
tices, including walk-forward validation, early stop-
ping, and, where applicable, grid-based optimization
to improve generalizability and avoid overfitting.
Data Acquisition. Sensor data was accessed
through Azure Machine Learning Studio using a des-
ignated Azure datastore. The dataset comprised flow
rate measurements tagged with DateTime and Sensor
ID. Since each model was designed to operate on data
from a single sensor, the dataset was filtered accord-
ingly and sorted in chronological order to maintain
temporal integrity essential for time-series forecast-
ing.
Train-Test Splitting. The time-series data was
split into training and testing sets using an 80:20 ratio
based on temporal order. The first 80% of the data
was used to train the models, while the remaining
20% served as the test set. This setup ensured that
only past observations were used to forecast future
values, mimicking real-world deployment scenarios.
Towards Machine Learning Driven Virtual Sensors for Smart Water Infrastructure
457
Traditional k-fold cross-validation was not employed,
as it violates the temporal sequence and risks data
leakage from future to past. Instead, the models were
trained once on the training set and evaluated on the
unseen test set. Future work may incorporate time-
series cross-validation approaches to improve evalua-
tion robustness (Bergmeir et al., 2018).
Evaluation Metrics. Model performance was
assessed using three widely accepted error metrics
(Hyndman and Koehler, 2006; Makridakis et al.,
2018): RMSE (Root Mean Squared Error), which pe-
nalizes large errors more heavily by squaring them;
MAE (Mean Absolute Error), which reflects the av-
erage magnitude of errors and is robust to outliers;
and R
2
(Coefficient of Determination), which indi-
cates the proportion of variance in the observed data
explained by the model predictions.
Visual Interpretation. In addition to quantita-
tive evaluation, visual diagnostics were used to in-
terpret model performance, identify error trends, and
detect possible non-stationarity or model bias. The
forecast results were visualized using matplotlib
and seaborn, displaying training data, actual test ob-
servations and predicted values. These plots offered
an intuitive assessment of prediction accuracy across
models and time horizons. The model execution time
for the entire dataset was also recorded to provide
context on computational efficiency. This combina-
tion of visual and statistical evaluation ensured a com-
prehensive and transparent evaluation of the effective-
ness of the model.
4 RESULTS AND DISCUSSION
In this section, we present and interpret the results for
each model output.
4.1 Model Execution Results
Five model outputs ARIMA, XGBoost, LSTM,
TadGAN, TSGAN were compared on two real-world
datasets.
Table 2: Performance Metrics for Dataset 1 (Sensor
403241).
Model ARIMA XGBoost LSTM TadGAN TSGAN
RMSE 2245.5 1647.5 2299.5 4872.3 3068.4
MAE 1226.3 701.8 1341.3 2521.6 1468.5
R
2
0.91 0.94 0.90 0.57 0.83
Exec. Time 20sec 12sec 57sec 43sec 2min 43sec
Tables 2 and 3 present the performance of five
models applied to two real-world flow sensor datasets.
XGBoost consistently achieved the highest predictive
Table 3: Performance Metrics for Dataset 2 (Sensor
403242).
Model ARIMA XGBoost LSTM TadGAN TSGAN
RMSE 3925.7 244.2 2525.2 2634.7 2162.6
MAE 1287.9 132.8 940.0 1111.3 884.6
R
2
0.86 0.99 0.91 0.90 0.93
Exec. Time 3min 9sec 14sec 4min 5sec 3min 59sec 15min 23sec
Figure 2: Results Visualization for Dataset 1.
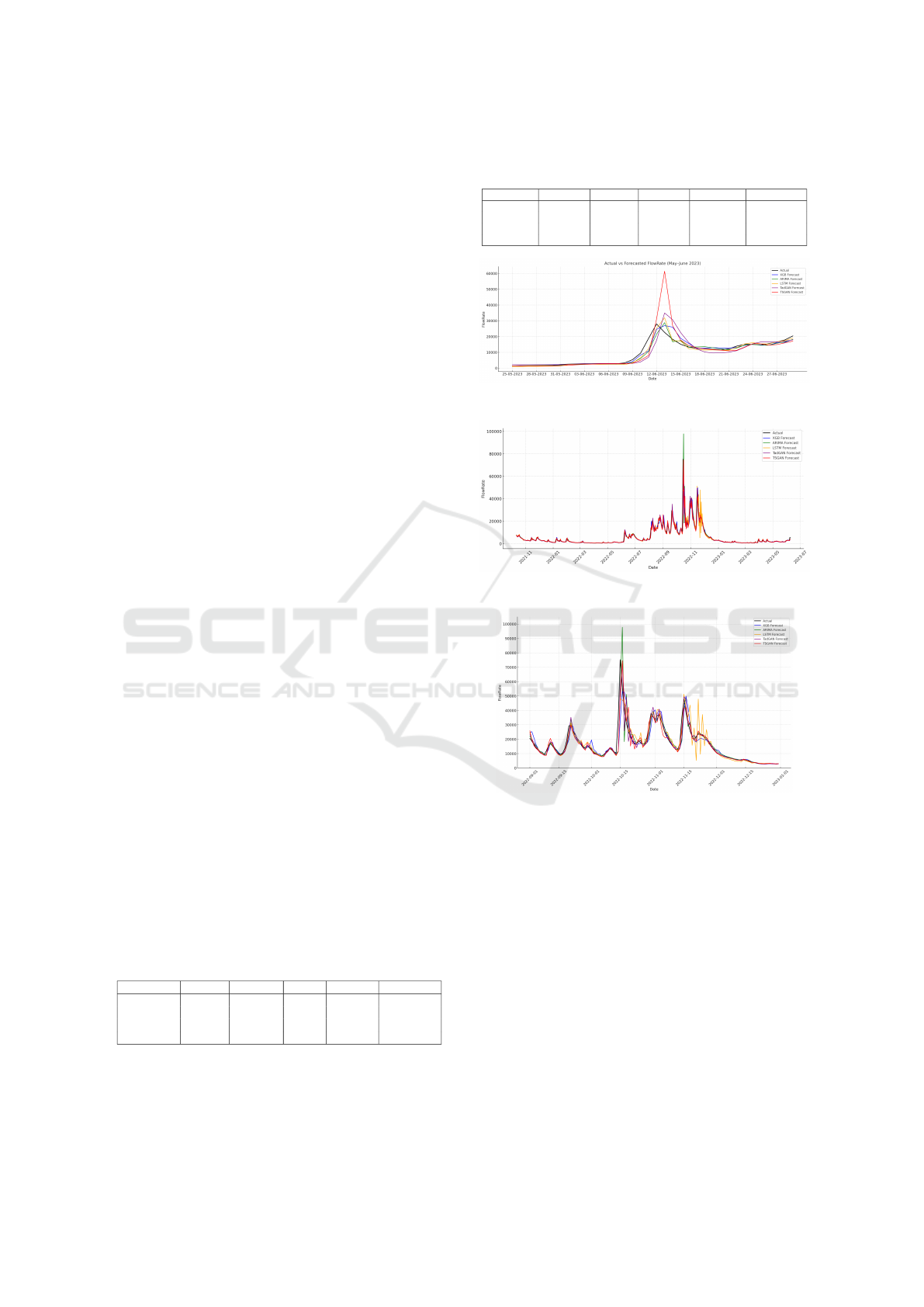
Figure 3: Results Visualization for Dataset 2.
Figure 4: Results Visualization for Dataset 2 (Zoomed: Sep
2021–Jan 2022).
accuracy in both datasets, followed by LSTM and
TSGAN. Generative models, particularly TadGAN,
showed less stability, especially in Dataset 1, which
exhibited more variable flow conditions. This initial
analysis highlights the superior performance of the
models, particularly XGBoost and LSTM, compared
to traditional statistical methods such as ARIMA.
For Sensor 403241 (Dataset 1) and Sensor 403242
(Dataset 2), XGBoost achieved the best results, with
RMSE values of 1647.5 and 244.2, and R
2
scores of
0.94 and 0.99, respectively. LSTM and TSGAN also
performed well, particularly in Dataset 2, where TS-
GAN demonstrated its ability to model complex, non-
linear patterns with an RMSE of 2162.6 and an R
2
of
0.93. In contrast, ARIMA showed consistently higher
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
458

error rates and lower explanatory power, reflecting its
limitations in capturing dynamic water usage behav-
iors. These findings support the growing emphasis in
the literature on the role of ML in enhancing forecast-
ing accuracy for infrastructure systems. In particular,
the model execution time for XGBoost was signifi-
cantly lower compared to other models, making it a
strong candidate for real-time deployment.
Figure 2 illustrates the forecast output for Dataset
1 during the May–June 2023 period. ARIMA suc-
cessfully captured the general trend, but lagged
slightly during the peak flow. XGBoost tracked the
actual data, especially during both the rising and
falling phases of the event. LSTM produced smooth
forecasts and maintained good alignment throughout,
though it slightly overestimated the peak. TadGAN
followed the flow trend relatively well but over-
predicted the peak value. TSGAN exhibited the
largest overestimation at the peak, reducing its overall
accuracy in this period. Overall, XGBoost and LSTM
offered the most reliable and consistent predictions in
this scenario.
Similar patterns were observed in Dataset 2, as
shown in Figures 3 and 4. ARIMA captured the gen-
eral flow trend, but struggled to respond accurately
during peak events, especially with sharp surges. XG-
Boost consistently aligned with the actual flow, and
performed well across both stable and volatile peri-
ods. LSTM produced smooth forecasts overall but
exhibited increased noise and fluctuations in certain
intervals, due to overfitting on local noise when the
training data contains high variance, combined with
its strong temporal memory. TadGAN followed the
trend reasonably but introduced fluctuations around
high-flow events. TSGAN demonstrated strong align-
ment with the actual values, particularly during peak
periods, and outperformed other generative models.
Overall, XGBoost and TSGAN provided the most re-
liable forecasts for Dataset 2.
4.2 Model Performance Insights
Our evaluation of models reveals that modern ML
approaches, particularly XGBoost and LSTM, con-
sistently outperformed traditional statistical methods
such as ARIMA in flow prediction tasks. XGBoost
achieved the highest accuracy across both datasets,
with an RMSE of 1647.50 and R
2
of 0.94 in Dataset 1,
and an even stronger RMSE of 244.17 and R
2
of 0.99
in Dataset 2. LSTM also performed robustly, effec-
tively capturing temporal patterns. Among generative
models, TSGAN showed potential in modeling non-
linear dynamics, achieving an R
2
of 0.93 on Dataset
2 but struggled with irregular patterns in Dataset 1.
ARIMA, by contrast, produced consistently higher er-
rors and lower R
2
scores, highlighting its limitations
in dynamic systems.
While XGBoost and LSTM were generally reli-
able, their effectiveness varied by dataset, underscor-
ing the importance of tailoring virtual sensor models
to specific environments. Regular retraining based on
evolving demand is critical to ensure sustained ac-
curacy. Integrating such models within DT frame-
works would enable automated updates and support
real-time operational monitoring.
These results suggest that ML models can serve
as effective tools for immediate data imputation and
near term prediction. However, more work is needed
to extend these benefits to long-term prediction sce-
narios. Overall, these insights offer practical guid-
ance for water utilities seeking to adopt ML and DL
techniques. By prioritizing robust models like XG-
Boost and LSTM, and exploring the integration of
generative approaches for anomaly detection and data
gap filling, utilities can significantly enhance the re-
silience, scalability, and decision making capabilities
of smart water infrastructure.
5 CONCLUSION AND FUTURE
WORK
This study investigates the potential of machine
learning-based virtual sensors to replicate physical
sensor output using historical flow data from two
key locations. Preliminary results show that short-
term flow forecasts can be generated accurately
and efficiently using models such as XGBoost and
LSTM. Both models outperformed traditional statis-
tical methods such as ARIMA in terms of predictive
accuracy and computational efficiency. In particular,
XGBoost delivered the best balance between speed
and performance, positioning it as a practical solution
for filling data gaps and supporting short-term fore-
casts.
Although these results are based on historical data
under known conditions, they demonstrate the strong
potential of XGBoost and LSTM for developing vir-
tual sensors in water infrastructure. Future work
should focus on validating these models using real-
time water network data, integrating insights from
correlated sensors, and enhancing multi-step forecast
capabilities. With further refinement, ML-based vir-
tual sensors could play a critical role in improving the
resilience, and responsiveness of smart water infras-
tructure.
Towards Machine Learning Driven Virtual Sensors for Smart Water Infrastructure
459

REFERENCES
Arnell, N. W. et al. (2019). Global and regional impacts of
climate change at different levels of global tempera-
ture increase. Global Environmental Change, 58:101–
113.
Berglund, E. Z., Shafiee, M. E., Xing, L., and Wen, J.
(2023). Digital twins for water distribution systems.
Journal of Water Resources Planning and Manage-
ment, 149(3):02523001.
Bergmeir, C., Hyndman, R. J., and Koo, B. (2018). A
note on the validity of cross-validation for evaluating
autoregressive time series prediction. Computational
Statistics & Data Analysis, 120:70–83.
Box, G. E. P., Jenkins, G. M., Reinsel, G. C., and Ljung,
G. M. (2015). Time Series Analysis: Forecasting and
Control. Wiley, Hoboken, NJ, 5th edition.
Chen, T. and Guestrin, C. (2016). Xgboost: A scalable
tree boosting system. In Proceedings of the 22nd
ACM SIGKDD International Conference on Knowl-
edge Discovery and Data Mining, pages 785–794.
ACM.
Geiger, A., Liu, D., Alnegheimish, S., Cuesta-Infante, A.,
and Veeramachaneni, K. (2020). Tadgan: Time series
anomaly detection using generative adversarial net-
works. In IEEE Int’l. Conf. on Big Data (Big Data
’20’), pages 33–43. IEEE.
Gonz
´
alez-Herb
´
on, R., Gonz
´
alez-Mateos, G., Rodr
´
ıguez-
Ossorio, J., Prada, M., Mor
´
an, A., Alonso, S., Fuertes,
J., and Dom
´
ınguez, M. (2025). Assessment and de-
ployment of a lstm-based virtual sensor in an indus-
trial process control loop. Neural Computing and Ap-
plications, 37(17):10507–10519.
Han, J., Kamber, M., and Pei, J. (2011). Data Mining: Con-
cepts and Techniques. Elsevier, Burlington, MA, 3rd
edition.
Han, Z., Zhao, J., Leung, H., Ma, K.-F., and Wang, W.
(2021). A review of deep learning models for time
series prediction. IEEE Sensors Journal, 21(6):7833–
7848.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural Computation, 9(8):1735–1780.
Hyndman, R. J. and Koehler, A. B. (2006). Another look at
measures of forecast accuracy. International Journal
of Forecasting, 22(4):679–688.
Ibrahim, T., Omar, Y., and Maghraby, F. A. (2020). Wa-
ter demand forecasting using machine learning and
time series algorithms. In 2020 International Confer-
ence on Emerging Smart Computing and Informatics
(ESCI), pages 325–329. IEEE.
Kadlec, P., Gabrys, B., and Strandt, S. (2009). Data-driven
soft sensors in the process industry. Computers &
Chemical Engineering, 33(4):795–814.
Karniadakis, G. E. et al. (2021). Physics-informed machine
learning. Nature Reviews Physics, 3(6):422–440.
Lakshmikantha, V., Hiriyannagowda, A., Manjunath, A.,
Patted, A., Basavaiah, J., and Anthony, A. A. (2022).
Iot based smart water quality monitoring system. Ma-
terials Today: Proceedings, 51:1283–1287.
Makridakis, S., Spiliotis, E., and Assimakopoulos, V.
(2018). Statistical and machine learning forecasting
methods: Concerns and ways forward. PLoS ONE,
13(3):e0194889.
Marcjasz, G., Narajewski, M., Weron, R., and Ziel, F.
(2023). Distributional neural networks for electricity
price forecasting. Energy Economics, 125:106843.
Martin, D., K
¨
uhl, N., and Satzger, G. (2021). Virtual sen-
sors. Business & Information Systems Engineering,
63:315–323.
Psichogios, D. and Ungar, L. (1992). A hybrid neural
network-first principles approach to process model-
ing. AIChE Journal, 38(10):1499–1511.
Rasmussen, C. E. and Williams, C. K. I. (2006). Gaussian
Processes for Machine Learning. MIT Press.
Shen, Y. et al. (2022). Digital twins for smart water manage-
ment: Framework and case studies. Water Research,
218:118449.
Smith, K. E. and Smith, A. O. (2020). Conditional
gan for timeseries generation. arXiv preprint
arXiv:2006.16477.
Weichert, D. et al. (2019). A review of machine learning
for the optimization of production processes. Interna-
tional Journal of Advanced Manufacturing Technol-
ogy, 104(9–12):3663–3682.
Zahedi, F., Alavi, H., Majrouhi Sardroud, J., and Dang, H.
(2024). Digital twins in the sustainable construction
industry. Buildings, 14(11):3613.
Zekri, S., Jabeur, N., and Gharrad, H. (2022). Smart water
management using intelligent digital twins. Comput-
ing and Informatics, 41(1):135–153.
Zhao, Z., Chen, W., Wu, X., Chen, P., Liu, J., Chen, J.,
and Deng, S. (2022). Deep learning for time series
forecasting: A survey. Artificial Intelligence Review,
55:4099–4139.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
460
