
Calibration Architecture for the Nonlinear Wheel Odometry Model with
Integrated Noise Compensation
M
´
at
´
e Fazekas
1,2 a
and P
´
eter G
´
asp
´
ar
1 b
1
HUN-REN Institute for Computer Science and Control, Hungarian Research Network (HUN-REN SZTAKI),
Kende Street 13-17, Budapest, 1111, Hungary
2
Department of Control for Transportation and Vehicle Systems, Budapest University of Technology and Economics
(BME-KJIT), Stoczek street 2, Budapest, 1111, Hungary
Keywords:
Parameter Identification, Wheel Odometry, Gauss-Newton, Optimal Control, Localization, Autonomous
Vehicle.
Abstract:
In the motion estimation of self-driving vehicles, the three main requirements are accuracy, robustness, and
cost-effectiveness. The generally applied sensors and methods are the GNSS, inertial, and visual-odometry, but
the contradictory requirements demand the integration of new ideas. The wheel odometry could be an adequate
choice since the method is robust and cost-effective, but the accuracy of the estimation is limited by the
parameter uncertainty, thus a calibration method should be included as well. However, the general parameter
identification of a nonlinear model in the presence of noise has not been solved yet. The presented method is
based on the assumption that noisy, but several measurements of GNSS and IMU sensors are available in a
self-driving vehicle. In the proposed architecture, nonlinear least squares and optimal control techniques are
combined in a unique way to compensate for the noise of the orientation and wheel rotation signals to achieve
unbiased model calibration. The performance of the developed algorithm and the accuracy of parameter
estimation are demonstrated with detailed validation and a test with a real vehicle.
1 INTRODUCTION
State estimation plays a critical role in self-driving
because trajectory planning and motion control are
based on its results. The aim is to determine the
velocities and pose signals as accurately as possible.
Similarly, robustness and cost-efficiency are also im-
portant in the automotive industry, thus cost-effective
automotive-grade types of sensors are applied gener-
ally. The disadvantages of the GNSS (Global Navi-
gation Satellite System), IMU (inertial measurement
unit), or vision-based methods can be mitigated with
the integration of wheel encoder measurements (Funk
et al., 2017), (Sebastian Thrun, 2006). An accurate
wheel odometry model would open up new possibil-
ities to eliminate the drawbacks of the usual global
navigation-centered GNSS-inertial-visual estimation
for vehicles (Gao et al., 2018), (Falco et al., 2017), for
example, it would be possible to correct the pseudor-
ange measurements of the GNSS modules, which im-
proves the performance of the whole state estimation.
a
https://orcid.org/0009-0007-2157-4053
b
https://orcid.org/0000-0003-3388-1724
Furthermore, in GNSS-denied environments, the ne-
cessity of wheel odometry is indisputable. However,
the model suffers from parameter uncertainty. There-
fore, this paper focuses on the calibration of the wheel
odometry model, which is equivalent to the parameter
identification of a nonlinear dynamic system. Gener-
ally, this type of optimization has not been solved yet,
see e.g. (Schoukens and Ljung, 2019), and the prob-
lem is more difficult when the model calibration has
to be performed with noisy signals.
The calibration problem of the wheel odometry
model first appeared in the navigation task of small
mobile robots and has also become a topic of investi-
gation with the appearance of autonomous functions
in the automotive industry. The related works op-
erate with two different estimation methods. In the
one, the parameter estimation is handled as a state fil-
tering with the Augmented Kalman-filter (Martinelli
and Siegwart, 2006; Brunker et al., 2017). The pro-
cess assumes zero dynamics for the parameters, thus
it is a simple way to identify unknown values, but the
convergence and observability are questionable (Mar-
tinelli and Siegwart, 2006; Censi et al., 2013), and
Fazekas, M. and Gáspár, P.
Calibration Architecture for the Nonlinear Wheel Odometry Model with Integrated Noise Compensation.
DOI: 10.5220/0013720800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 325-332
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
325

a final stable value can not be obtained. The other
method is to estimate the parameters as a regression
problem, which, due to the nonlinear model, results in
non-convex optimization. Its general solution is diffi-
cult, the methods such as (Censi et al., 2013; Seeg-
miller et al., 2013) manage the nonlinear problem
with double linearization or separation, however these
only operate with a simplified odometry model and al-
most perfect reference orientation measurements. In
the case of a real-sized self-driving vehicle, these can
not be presumed (Fazekas et al., 2020).
When parameters of a nonlinear model are identi-
fied, the key factor is the handling of the noise. Linear
system identification is a well-explored area (Ljung,
1987), but due to nonlinearity, there are new issues
that do not appear at all in the linear case. Since the
dynamics from the inputs to the outputs is not linear,
the impact of the input noise can not be modeled with
Gaussian distribution (which assumption is applied in
the methods such as Kalman-filtering or least squares)
on the measured output (Schoukens and Ljung, 2019).
Thus, the model calibration will certainly be biased,
even in the case of white noise.
This distortion effect can be handled in two ways.
The one is to apply specific requirements, such as un-
biased estimation of the initial pose (Antonelli et al.,
2005), measurement with expensive sensors (Lemmer
et al., 2010), or special pre-defined measurement sce-
narios (Jung et al., 2016), etc. Only a few papers use
the other way, which is to develop a unique algorithm
that deals with the noise. In (Maye et al., 2016), an
undesirable behavior of the traditional observability
analysis is examined. The proposed algorithm detects
the case when, due to the noise, the parameters seem
to be observable, but in fact, they are not (e.g. the ve-
hicle moves on a degenerate path for the calibration).
In parallel with the machine learning boom, stud-
ies apply machine learning techniques to the odom-
etry calibration topic. In (Onyekpe et al., 2021), a
neural network is trained to learn the pose error of a
mobile robot, and an improved version in (He et al.,
2023) for real-sized vehicles, but the online recalibra-
tion is not addressed. Other works, such as (Toledo
et al., 2018) and (Zhang et al., 2021), approximate the
whole odometry model instead of the error. Regard-
less of whether the error or the model is learned, spe-
cial attention should be taken to avoid overfitting, as
the training data’s actual measurement error includes
the noise and it is also approximated. Another dis-
advantage is that the industry prefers physical mod-
els to black-box models, especially for safety-critical
systems such as automated road vehicles. Therefore,
these can be rather a supplementary method and more
important is the detailed physical modeling and the
calibration of its parameters, before the approxima-
tion of the remaining error terms.
Our work addresses the direct compensation of
the distortion effect of the noise. Any specific re-
quirement is not applied, since a self-driving vehi-
cle should recalibrate itself with the available onboard
sensors. Only measurements of general driving in real
streets are used, without any predefined path or in-
put sequence. The main contribution is that the pro-
posed calibration architecture includes noise compen-
sation besides the traditional parameter identification.
The algorithm operates with the Gauss-Newton non-
linear least squares method and an optimal control
technique. The efficiency of the proposed algorithm
is validated with experimental tests of a real-sized ve-
hicle, which demonstrates that the mentioned issues
of the noise are eliminated, and unbiased model cali-
bration can be reached.
The remainder of the paper is organized as fol-
lows. In Section 2, the applied odometry model, in-
cluding a dynamic wheel model, is presented. The
general calibration method of a nonlinear model is
described in Section 3. This section also outlines the
problems and gives a brief review with motivation ex-
amples. The proposed improved calibration architec-
ture with noise compensation can be found in Section
4. The validity of our approach is demonstrated via
vehicle test experiments and detailed tests in Section
5, and finally, the paper is concluded in Section 6.
2 VEHICLE MODEL
The navigation with wheel odometry is based on a
model, where the state vector x
t
contains the pose,
the longitudinal and lateral positions of the center of
gravity p
x,t
, p
y,t
, and the ψ
t
orientation of the vehicle,
and change of the pose is based on the longitudinal
v
t−1
and angular ω
t−1
velocities,
p
x,t
p
y,t
ψ
t
=
p
x,t−1
+ v
t−1
· cos(ψ
t−1
+
ω
t−1
2
+ β
t−1
)
p
y,t−1
+ v
t−1
· sin(ψ
t−1
+
ω
t−1
2
+ β
t−1
)
ψ
t−1
+ ω
t−1
.
(1)
The input u
t
is composed of the n
l,t
effective
wheel rotation signals (l = RL, RR rear-left/right),
which are the slip free rotations, and the β
t
sideslip
angle of the vehicle.
The velocities are computed utilizing the wheel
rotations,
v
t
= (n
RL,t
· c
RL,t
+ n
RR,t
· c
RR,t
)/2, (2a)
ω
t
= (n
RR,t
· c
RR,t
− n
RL,t
· c
RL,t
)/t
r
, (2b)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
326
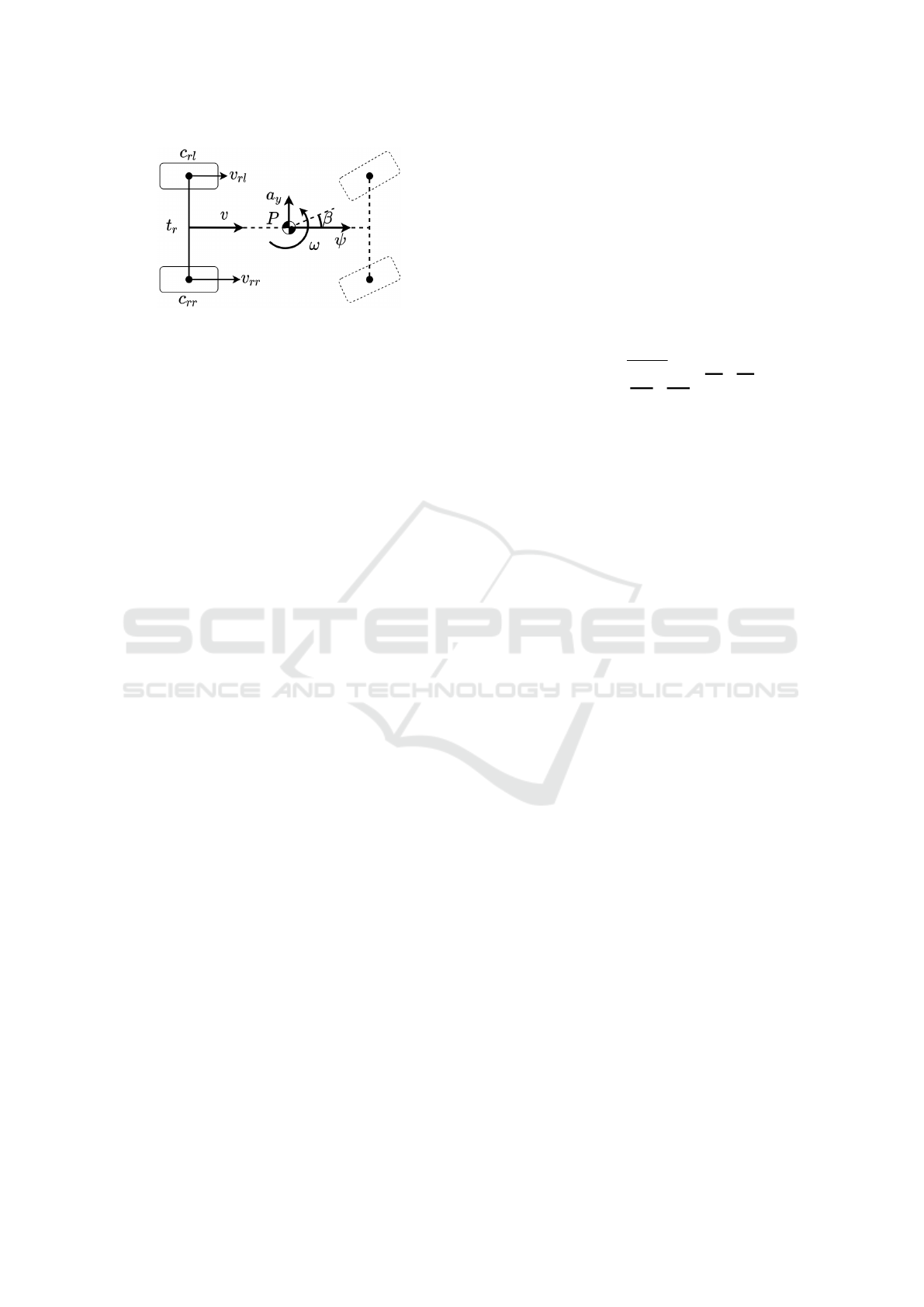
Figure 1: Odometry model.
where c
l,t
is the actual wheel circumference, and t
R
is the rear track. The slight change of the wheel ra-
dius due to the effect of vertical dynamics is generally
neglected, because the odometry-based localization is
widely used in low-speed circumstances, e.g. auto-
mated parking. However, our method is developed
for general driving, where the dynamics is significant,
thus we apply the proposed model of (Fazekas et al.,
2020), in which the change is considered, such as
c
RL,t
= c
e
+ c
d
/2 + d · a
y,t
, (3a)
c
RR,t
= c
e
− c
d
/2 − d · a
y,t
, (3b)
where the c
e
is the effective wheel circumference, c
d
is the difference between the effective values, a
y,t
is
the lateral acceleration, and the dynamic component
d takes into account the effect of vertical dynamics.
In the calibration process, every state variable is mea-
sured, thus the system model is
x
t
= f (x
t−1
,u
t−1
,θ), x
t
= [p
x,t
, p
y,t
,ψ
t
]
T
, (4a)
u
t
= [n
RL,t
,n
RR,t
,β
t
,a
y,t
]
T
, y
t
= x
t
, (4b)
and the vehicle model parameters are arranged in the
parameter vector,
θ = [c
e
,c
d
,t
r
,d]. (5)
The values are illustrated in the paper with the
units of m,mm,m,mm·s
2
/m for the c
e
,c
d
,t
r
,d parame-
ters, respectively. The nominal values of c
e
and t
r
can
be found in the vehicle datasheet, but with these val-
ues, the position error of the model is already in the
range of 10 m after a few hundred meters.
3 CALIBRATION OF
NONLINEAR MODELS AND
MOTIVATION EXAMPLES
3.1 Parameter Estimation with
Gauss-Newton Method
Generally, the parameter estimation is formulated as a
least squares (LS) optimization problem, to minimize
the error of the
b
y
k
(θ) predictor of the model from
e
y
k
output measurements, such as
b
θ
opt
= arg min
θ
V
K
(θ) = arg min
θ
K
∑
k=1
||
e
y
k
−
b
y
k
(θ)||
2
,
(6)
When the model is nonlinear in θ the optimization
can only be solved with numerical search (Tangirala,
2015). We apply the Gauss-Newton (G-N) method
that solves the nonlinear least squares problem with
Taylor-approximation in the following way,
b
y
k
(θ) ≈
b
y
k
(θ
i−1
) +
∂
b
y
k
(θ)
∂θ
θ
i−1
| {z }
j
k
(θ − θ
i−1
)
| {z }
∆θ
. (7)
Due to the dynamic behavior of the predictor, the
j
k
jacobians are computed recursively. This results in
a locally linear LS problem, such as
c
∆θ
opt
= arg min
∆θ
K
∑
k=1
||(
e
y
k
−
b
y
k
(
b
θ
i−1
)) − j
k
∆θ||
2
, (8)
which can be solved with the LS solution in an itera-
tive way,
b
θ
i
=
b
θ
i−1
+ (J
T
W J)
−1
J
T
W R, (9)
where the J := J(
b
θ
i−1
), R :=
e
Y −
b
Y (
b
θ
i−1
) matrices are
formed from the j
k
and (
e
y
k
−
b
y
k
(
b
θ
i−1
) values, respec-
tively. A weight matrix W is also added to the basic
solution. Since the model is linearized in the previ-
ous parameters, an initial guess for θ is required, and
when in last term (
e
Y −
b
Y (
b
θ
i−1
)) the integrated system
model is computed, the states have to be initialized at
the beginning of the estimation window.
3.2 Problems of Nonlinear Parameter
Estimation
The noise on the
e
y
t
measured output would be less sig-
nificant because it enters after the nonlinearity. How-
ever, when the R residual in (9) is formulated, the
e
y
t→k=0
measured output has to be utilized for state
initialization. Due to the appeared noise on it, the in-
tegrated model diverges from the correct path regard-
less of the vehicle parameters, which results in bias in
the model calibration. Some paper tries to deal with
the issue (Fazekas et al., 2021b), but the general solu-
tion is still an open question.
The noise on the u
t
measured input must not be ne-
glected, since its impact on the output can not be mod-
eled with the Gaussian framework (Schoukens and
Ljung, 2019). Because the methods like least squares
or Kalman-filter apply this framework, the estimation
would be biased. Therefore, our paper focuses on the
compensation of both input and output noises to guar-
antee unbiased model calibration.
Calibration Architecture for the Nonlinear Wheel Odometry Model with Integrated Noise Compensation
327

3.3 Motivation Examples of the
Calibration and Compensation
Without calibration of the odometry model, c
d
=0 and
d=0, and nominal values as c
e
=2 m, and t
r
=1.55 m
have to be utilized. The localization error with this
setting is 6 m on 150 m long segments, thus the model
without calibration is useless for vehicle localization.
The amount of distortion due to uncertain pa-
rameters and wheel rotation input noises, simulated
signals are generated where the measured (n
RL/RR
)
wheel rotation signals are filtered with a Fourier-
transformation, and these are utilized as inputs in the
odometry model (4a) to form noise-free signals.
3.3.1 Impact of the Parameter Uncertainty and
Initialization
The positioning uncertainty is almost linear with the
parameter uncertainty. The circumference difference
has the highest impact, the deviation of around 2 mm
of c
d
has the same 2 m mean position error as 2.5
cm of c
e
, 5 cm of t
r
, or 2 mm · s
2
/m of d parameter
uncertainty.
The noisy measurements used for state initial-
ization (x
k=0
=
e
y
t
) result in similar path divergence
in the integrated model. For example, calibrating
the model with additive Gaussian pose noises with
σ
p
x
= σ
p
y
= 0.2 m, and σ
ψ
= 1.5
◦
standard deviation,
the bias of the estimated parameters are 7.82e-04 m,
0.24 mm, 0.09 m, 1.26 mm for the c
e
,c
d
,t
r
,d param-
eters, respectively. The consequence of these uncer-
tain calibrations is a 2.26 m validation error on 150
m long routes. The noise on the orientation initializa-
tion is mainly responsible for the error, thus for proper
odometry calibration, the measured orientation has to
be corrected.
3.3.2 Impact of the Wheel Rotation Noise
For the examination of the impact of wheel rota-
tion noise, generated Gaussian noise signals with
σ
n,RL/RR
= 0.0005 (at 50 km/h the n
RL/RR,t
signals are
0.17 due to the multiplication by the sampling time)
are added to the filtered signals. Since the simulated
pose signals are utilized for the calibration, the de-
viation from the noise-free case is induced only by
the noise of the wheel rotation. The biases of the
identified parameters are 0.0002 m, 0.31 mm, 0.25
m, 0.7 mm for the c
e
,c
d
,t
r
,d parameters, respectively,
but the middle 50% IQR ranges of the estimated val-
ues are spread within the 0.003 m, 1.2 mm, 0.1 m,
2.2 mm ranges. Previous examinations illustrate that
these deviations result in significantly increased posi-
tion error, which can be found in Figure 2. The 1 m
Figure 2: Mean position errors with σ
n,RL/RR
= 0.0005 ad-
ditive wheel rotation noise.
position error demonstrates the necessity of compen-
sating the wheel rotation signals as well, since even
with this generated noise with zero mean, the result-
ing localization inaccuracy is significant.
4 CALIBRATION METHOD
WITH INTEGRATED NOISE
COMPENSATION
4.1 Estimation in Batch Mode
The mentioned problems in Section 3.2 can be han-
dled if more K long measurement segments are ap-
plied at once. In this batch mode, the matrices in the
G-N method of the segments are concatenated into the
following huge matrices (N denotes the batch size),
J
B
(
b
θ
i−1
) =
J
1
(
b
θ
i−1
)
.
.
.
J
N
(
b
θ
i−1
)
,R
B
=
Y
1
−
b
Y
1
(
b
θ
i−1
)
.
.
.
Y
N
−
b
Y
N
(
b
θ
i−1
)
.
(10)
The parameters can be identified in the same iterative
way of (9) with the batch matrices, as
b
θ
B,i
=
b
θ
B,i−1
+ (J
T
B
W
B
J
B
)
−1
J
T
B
W
B
R
B
, (11)
In this case, the model fitting is performed on ev-
ery segment simultaneously, which reduces the effect
of noise. However, the distortion effect of the noises
is only reduced but not eliminated, since the segment
with the highest residual has a higher impact on the re-
sulting common estimated parameters due to the min-
imization of the sum of residuals.
4.2 Input Compensation Method
The main inputs of the odometry model to be com-
pensated are the effective wheel rotations, which will
be noted as u
c,t
= [n
RL,t
,n
RR,t
]
T
. These are measured
with the ABS encoder, but the quantities are corrupted
by the slip and measurement noises.
For the compensation of the wheel rotation input
noises, a minimization task is formed such as,
min
u
c
(·)
K
∑
k=1
L
e
y
k
,y
k
(θ),u
c,k
s.t. x
k
= f (x
k−1
,u
k−1
,θ) | x
0
=
e
y
0
(12)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
328
which is the general optimal control problem in dis-
crete form (y
k
(θ) = x
k
the model output). The idea is
motivated by the well-known model predictive con-
trol strategy, where the optimal input sequence can be
determined with numerical optimization to satisfy the
tracking of a future trajectory by the system.
In the nonlinear case, it is meaningful to apply
quadratic cost functions and perform Jacobian lin-
earization of the model around a nominal trajectory,
b
A
k
=
∂ f (·)
∂x
b
x
k
,
b
B
k
=
∂ f (·)
∂u
e
u
k
, (13a)
b
g
k
= f (
b
x
k−1
,
e
u
k−1
,θ)− (A
k
b
x
k−1
+ B
k
e
u
k−1
). (13b)
With these considerations, the optimization prob-
lem (12) can be traced back to a locally linear predic-
tive control minimization with equality constraints.
The following task can be solved with quadratic pro-
gramming (QP) techniques,
min
u
c
(·)
K
∑
k=1
||
e
y
k
− y
k
(θ)||
2
Q
+ ||∆u
c,k
||
2
R
→ ˘u
c
(·)
s.t. x
k
=
b
A
k
x
k−1
+
b
B
k
u
k−1
+
b
g
k
| x
0
=
e
y
0
x
k
≤ x
k
≤ x
k
, u
c,k
≤ u
c,k
≤ u
c,k
k = 1...K
(14)
where Q, and R are positive definite weighting ma-
trices. The nominal trajectory
b
x
k=1..K
is computed
with the model (4a) utilizing the measured
e
u
c,k=1..K
wheel rotations. The QP solvers apply initial values
for the optimization to which the measured values are
applied as well.
4.3 Calibration Architecture
Our method operates with automotive-grade dual
GNSS, IMU and wheel encoder sensors. The details
of the measurements can be found in Section 5.1, now,
assume to have measured pose (
e
p
x
,
e
p
y
,
e
ψ), wheel ro-
tation (
e
n
RL
,
e
n
RR
), and the required additional inputs of
the model (β, a
y
).
The aim of this paper is the proper model calibra-
tion through noise compensation. However, the opti-
mal control task (12) supposes a known θ parameter,
and correct pose values are required for the state ini-
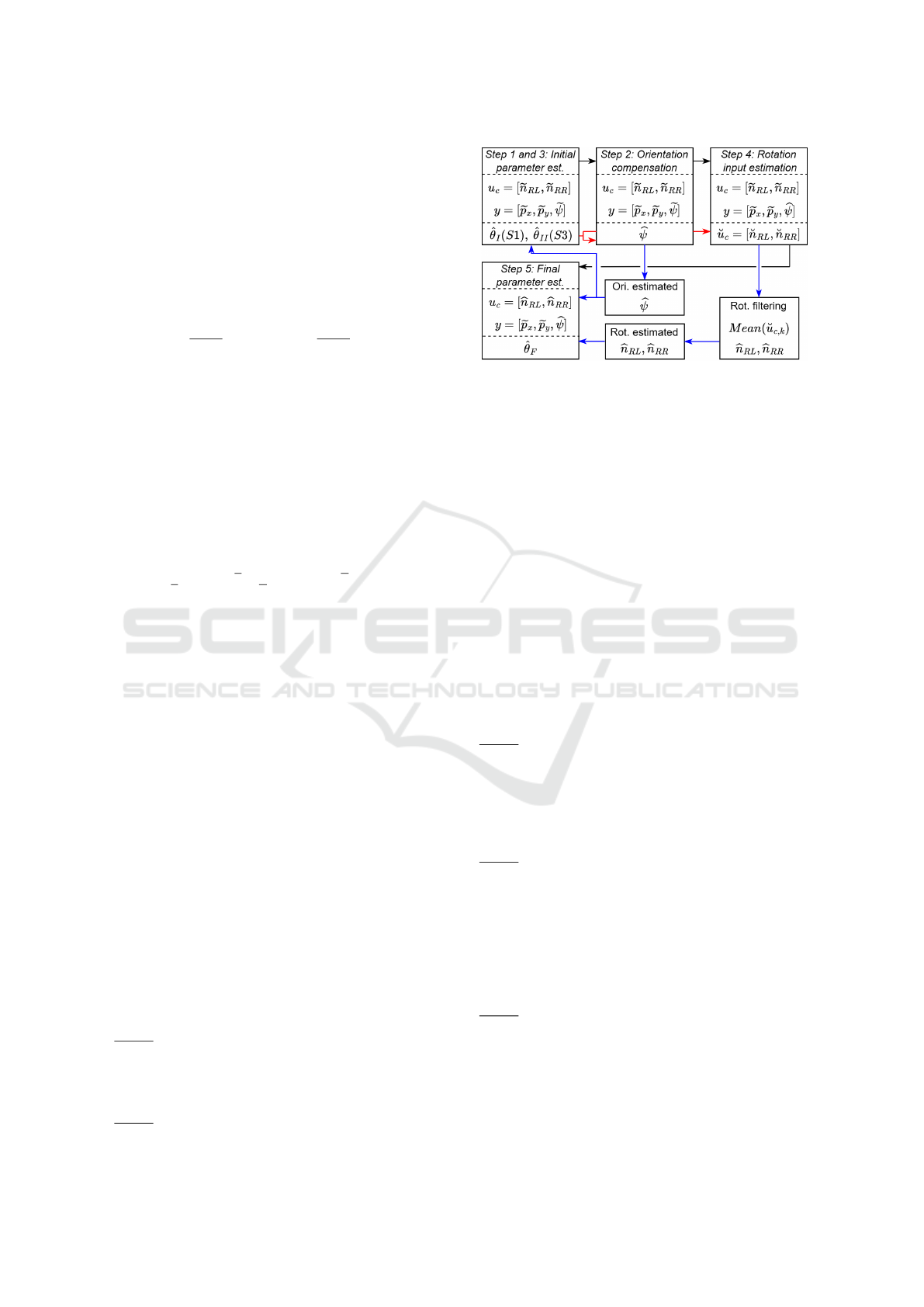
tialization. Therefore, a complex architecture is pro-
posed, which can be found in Figure 3. The algorithm
operates with smaller segments divided from a long
measurement, and it has the following 5 steps:
Step 1: Prior parameter estimation
To generate parameters for the input estimation, ini-
tial G-N identifications are performed in batch mode
(Section 4.1) resulting
b
θ
I
values.
Step 2: Orientation correction
Figure 3: Architecture of the model calibration. In every
step, the actual version of the utilized input and output sig-
nals are illustrated.
The wheel rotation compensation method presented
in Section 4.2 is applicable for the orientation correc-
tion as well. As a result of the minimization, besides
the optimal inputs, the states are also estimated. To
minimize the trajectory error in (14), the evolution of
estimated wheel rotation signals in the initial time in-
stants generates a significant change in the orienta-
tion, which is equivalent to the compensation of the
initialization error. The compensated orientation is
formulated as,
b
ψ
k
=
e
ψ
k
+ ∆ψ, ∆ψ = (
b
ψ
10
(
b
θ
I
, ˘u
c
) −
e
ψ
10
), (15)
where
b
ψ
10
(θ
I
, ˘u
c
) is the orientation value with the es-
timated optimal inputs at the k = 10 time moment.
This compensation is performed for every segment of
the batch individually.
Step 3: Compensated parameter estimation
Since the orientation signal of the segments is com-
pensated, the same batch parameter estimation as in
Step 1 is recalculated. In this way,
b
θ
II
initial param-
eters with increased accuracy are formulated for the
input estimation.
Step 4: Rotation input estimation
The wheel rotation compensation is performed with
the optimal control algorithm. The estimated
b
ψ
k
val-
ues are utilized, and the vehicle model is parameter-
ized with
b
θ
II
. Since more
b
θ
II
values are available, the
input estimation is performed more times, and com-
pensated
b
n
RL/RR
signals are formed as the mean of the
middle 80% of ˘u
c
estimations.
Step 5: Final parameter estimation
Finally, the vehicle parameters are identified in batch
mode resulting in the
b
θ
F
identified values, but at this
time in every segment, the compensated
b
n
RL
and
b
n
RR
inputs, and
b
ψ
k
orientation are utilized.
Calibration Architecture for the Nonlinear Wheel Odometry Model with Integrated Noise Compensation
329

4.4 Tuning of the Method Through an
Illustration Example
In the Gauss-Newton parameter identification
method, the W is introduced to equalize the lower
value of orientation error in radians, than the position
errors in meters. The experimental tuning results in
the following setting
w = [w
p
x
,w
p
y
,w
ψ
] = [1,1,50], W = [w,...,w]
1×3K
to obtain proper vehicle model calibration. Due to
the linearization in the G-N method, an initial guess
for the parameters is necessary, for which the nomi-
nal values as θ
nom
= [2,0,1.55, 0] from the vehicle’s
datasheet are applied. The maximum iteration of the
G-N method is 5.
Since in our optimal control problem the esti-
mated inputs are measured and close to the effective
ones, a relatively high prediction horizon K = 650 can
be applied. For maximum iteration, 10 is sufficient,
due to the limits being chosen such as,
x
k
=
e
y
k
− [5,5,0.5], x
k
=
e
y
k
+ [5,5,0.5],
u
c,k
=
e
u
c,k
· 0.95, u
c,k
=
e
u
c,k
· 1.05.
The main tuning parameters of the optimal con-
trol task are the Q and R weighting matrices as Q =
diag([q
p
x
,q
p
y
,q
ψ
]) and R = diag([r
n
RL
,r
n
RR
]). En-
suring the trajectory tracking without high-frequency
changes of inputs, the weights are chosen, such as
q
p
x
= 1, q
p
y
= 1, r
n
RL
= 1000, r
n
RR
= 1000,
q
ψ
= 1 in Step 2, q
ψ
= 10 in Step 4.
The batch size of the G-N method and the num-
ber of input estimations to form the compensated sig-
nals influence the accuracy of model calibration. The
batch size is fixed through the algorithm to N = 9,
and when the
b
n
RL/RR
signals are estimated, 12 input
estimations are performed.
5 RESULTS
5.1 Test Vehicle and Measurement
The test vehicle is equipped with automotive-grade
GNSS, compass, and IMU sensors, and from the ve-
hicle’s CAN bus, the wheel encoder signals are also
saved with 0.025 s sampling time. The test track is a
24 km long route in suburban and city driving, con-
taining various bends, two roundabouts, and lots of
crossroads.
The signals of the GNSS, compass, and IMU sen-
sor are utilized in a Kalman-filter (Caron et al., 2006)
to compute the measured
e
p
x
,
e
p
y
,
e
ψ pose values. The
sideslip is also estimated with an IMU-based method
(Fazekas et al., 2021a) in the bends.
The calibration architecture operates with smaller
measurement parts, therefore, the route is divided into
segments with 150 m average length. Since the c
d
,t
R
and d parameters can be appropriately observed only
with the yaw rate equations (2b), the 896 segments
with absolute angular velocity higher than 0.15 rad/s
are selected for the parameter estimation. Using these
segments, 1000 various batches are formulated.
5.2 Validation Process and Error
The true value of the θ = [c
e
,c
d
,t
R
,d] parameters are
unknown, thus the presented method is validated with
the position error of the calibrated models. In order to
avoid overfitting, the segments are regenerated with
300 m average length for the validation. The position
error of a calibration containing
b
θ is calculated for ev-
ery segment s,
E
p,s
=
K
∑
k=1
q
(
e
p
x,k
− p
x,k
(
b
θ))
2
+ (
e
p
y,k
− p
y,k
(
b
θ))
2
(16)
and the E
p
= E
p.s
average of these is applied as a val-
idation error to evaluate the calibration.
The minimum validation error is not zero, because
the states of the odometry model (4a) at the beginning
are initialized with the
e
y
t
measured pose values, and
raw
e
n
RL/RR,t
rotations are utilized. The reachable limit
in this validation case is 2.42 m, and the calibrations
are presented compared to this value.
5.3 Prior Model Calibrations
To reach initial estimated parameters, the batch G-
N method (Section 4.1) is utilized on the formulated
1000 batches. In Step 1, the raw measured
e
y
t
pose and
e
n
RL/RR,t
rotations are utilized. The estimated parame-
ters can be found in Figure 5, the standard deviations
of the quantities are high, e.g. the track width reaches
both 1.45 m and 1.65 m, which are unrealistic. The
top boxplot of Figure 6 shows the validation error, the
median value is 0.8 m, but due to the uncertain pa-
rameters, the error reaches 3.5 m.
5.4 Orientation Compensation and
Illustration of the Input Estimation
It has been mentioned that an interesting property of
the input estimation is the capability of correcting the
orientation measurement uncertainty as well. For a
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
330
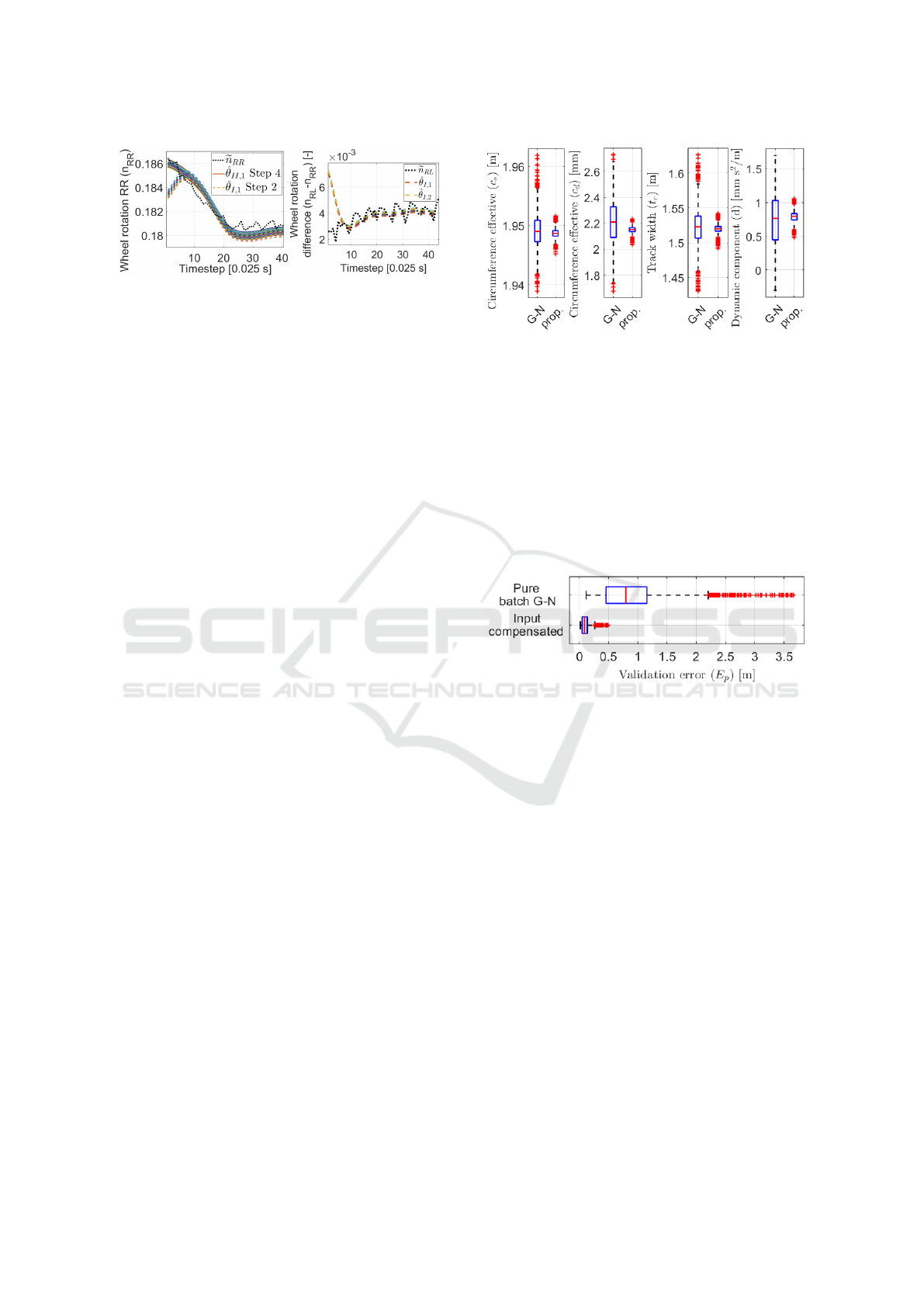
Figure 4: Estimated wheel rotation signals of a segment.
segment, the orientation correction (Step 2) is per-
formed with more θ
I
prior parameters. The left of
Figure 4 presents a part of the estimated wheel rota-
tions. The estimated signals are close to each other
with a similar shape. In the case of orientation cor-
rection, the difference of the rotations is worth exam-
ining in the right of Figure 4.
Initially, the difference between the estimated sig-
nals is significantly greater than the difference be-
tween the measured rotations, indicating a determin-
istic occurrence. The change of the wheel rotation dif-
ference induces additional angular velocity, thus the
orientation can be compensated via the input estima-
tion method.
The estimated orientation difference (∆ψ) of all of
the segments in the batches is in the range of ±3
◦
with
IQR of [-0.7
◦
,0.6
◦
], which has a significant impact on
the estimations, therefore the orientation compensa-
tion is absolutely necessary.
In Step 4, the same input estimation is executed
with the segments as in Step 2, but the
b
ψ estimated
orientation is utilized. The left of Figure 4 shows that
the fall at the beginning disappeared owing to the im-
proved initialization, and the estimated rotations are
around the measured ones. However, the plot illus-
trates that the optimized trajectory tracking induces
smoother wheel rotations and verifies the assumption
of noisy measured signals. The variety of the estima-
tions is filtered out with the formulation of the mean
of the ˘u
c
signals to reach
b
n
RL/RR
.
5.5 Calibration with the Proposed
Method and Validation
Finally, in Step 5, the vehicle parameters are esti-
mated in batch mode utilizing the estimated
e
ψ and
e
n
RL/RR
signals. For comparison, the same batches are
used as in Step 1. The process illustrated in Figure 3
is performed for every batch. The estimated parame-
ters of the 1000 batches are shown with box-plots in
Figure 5. The medians of the identified parameters
are almost the same as in Step 1 with the pure batch
G-N, but the standard deviations of the calibrations
decrease substantially.
Figure 5: Box-plots of the estimated parameters with the
pure (Step 1) and proposed (Step 5.) method.
The ranges of the middle 50% of the parameters
are decreased by 78%, 87%, 80% and 84%, of the c
e
,
c
d
, t
r
, d parameters, while the spreads of estimations
are approximately the same by 75% on average, re-
spectively.
The validation errors of the calibrated models in
Step 1 and 5 can be found in Figure 6 with box-plots.
This demonstrates the significant improvement with
the proposed algorithm, and the impact of the noise
on the measured signals as well.
Figure 6: Box-plots of the validation errors with the pure
batch G-N technique in Step 1, and the final estimation with
the compensations in Step 5.
When the compensated
b
n
RL/RR
rotations are uti-
lized, the calibration accuracy is increased on average,
and furthermore, the calibrations with higher errors
disappear. These should be the cases when the distor-
tion is induced by the input noise. Compared to the
baseline pure batch G-N calibrations, using the pro-
posed method, the worst model with the compensated
signals has a lower error than the 25th percentile with
the uncompensated signals. Considering the reach-
able limit, the median validation error is only 0.1 m,
which indicates a nearly bias-free model calibration
owing to the compensation of the noisy signals with
the highest influence.
6 EVALUATION AND
CONCLUSION
In this paper, a novel architecture integrating the com-
pensation of the wheel rotation input noises was pre-
Calibration Architecture for the Nonlinear Wheel Odometry Model with Integrated Noise Compensation
331

sented for the calibration of the nonlinear odometry
model of a vehicle. This is performed with the batch
version of the Gauss-Newton algorithm for the param-
eter estimation, and with the MPC-type optimal con-
trol technique for the input compensation. The main
contribution of the paper is that, before the parame-
ter identification, wheel rotation noises are compen-
sated in an optimal way to reach the bias-free model
calibration. In the future, we would like to examine
this input estimation from a theoretical context and
expand the method as a general parameter identifica-
tion tool for the calibration of nonlinear models.
ACKNOWLEDGEMENTS
The work of Mate Fazekas has been implemented
within the project no. MEC-R-24 with the support
provided by the Ministry of Culture and Innovation
of Hungary from the National Research, Develop-
ment and Innovation Fund, financed under the MEC-
R 149345 funding scheme. The research was sup-
ported by the European Union within the framework
of the National Laboratory for Autonomous Systems
(RRF-2.3.1-21-2022-00002).
REFERENCES
Antonelli, G., Chiaverini, S., and Fusco, G. (2005). A cal-
ibration method for odometry of mobile robots based
on the least-squares technique: theory and experi-
mental validation. IEEE Transactions on Robotics,
21(5):994–1004.
Brunker, A., Wohlgemuth, T., Frey, M., and Gau-
terin, F. (2017). GNSS-shortages-resistant and self-
adaptive rear axle kinematic parameter estimator (SA-
RAKPE). In 28th IEEE Intelligent Vehicles Sympo-
sium.
Caron, F., Duflos, E., Pomorski, D., and Vanheeghe, P.
(2006). GPS/IMU data fusion using multisensor
Kalman-filtering: Introduction of contextual aspects.
Information Fusion, 7(2):221–230.
Censi, A., Franchi, A., Marchionni, L., and Oriolo, G.
(2013). Simultaneous calibration of odometry and
sensor parameters for mobile robots. IEEE Transac-
tions on Robotics, 29(2):475–492.
Falco, G., Pini, M., and Marucco, G. (2017). Loose
and tight gnss/ins integrations: Comparison of per-
formance assessed in real urban scenarios. Sensors,
17(2).
Fazekas, M., G
´
asp
´
ar, P., and N
´
emeth, B. (2021a). Cali-
bration and improvement of an odometry model with
dynamic wheel and lateral dynamics integration. Sen-
sors, 21(2).
Fazekas, M., G
´
asp
´
ar, P., and N
´
emeth, B. (2021b). Esti-
mation of wheel odometry model parameters with im-
proved gauss-newton method. In IEEE International
Conference on Multisensor Fusion and Integration.
Fazekas, M., N
´
emeth, B., G
´
asp
´
ar, P., and Sename, O.
(2020). Vehicle odometry model identification consid-
ering dynamic load transfers. In 28th Mediterranean
Conference on Control and Automation, pages 19–24.
Funk, N., Alatur, N., and Deuber, R. (2017). Autonomous
electric race car design. In International Electric Ve-
hicle Symposium.
Gao, Z., Ge, M., Li, Y., Chen, Q., Zhang, Q., Niu, X.,
Zhang, H., Shen, W., and Schuh, H. (2018). Odome-
ter, low-cost inertial sensors, and four-gnss data to en-
hance ppp and attitude determination. GPS Solutions,
22(57):147–159.
He, K., Ding, H., Xu, N., and Guo, K. (2023). Wheel odom-
etry with deep learning-based error prediction model
for vehicle localization. Applied Sciences, 13(9).
Jung, D., Seong, J., bae Moon, C., Jin, J., , and Chung, W.
(2016). Accurate calibration of systematic errors for
car-like mobile robots using experimental orientation
errors. International Journal of Precision Engineering
and Manufacturing, 17(9):1113–1119.
Lemmer, L., Heb, R., Krauss, M., and Schilling, K. (2010).
Calibration of a car-like mobile robot with a high-
precision positioning system. In 2nd IFAC Symposium
on Telematics Applications.
Ljung, L. (1987). System Identification:Theory for the User.
PTR Prentice Hall.
Martinelli, A. and Siegwart, R. (2006). Observability prop-
erties and optimal trajectories for on-line odometry
self-calibration. In IEEE Conference on Decision and
Control, pages 3065–3070.
Maye, J., Sommer, H., Agamennoni, G., Siegwart, R., and
Furgale, P. (2016). Online self-calibration for robotic
systems. The International Journal of Robotics Re-
search, 35(4):357–380.
Onyekpe, U., Palade, V., Herath, A., Kanarachos, S., and
Fitzpatrick, M. E. (2021). Whonet: Wheel odome-
try neural network for vehicular localisation in gnss-
deprived environments. Engineering Applications of
Artificial Intelligence, 105:104421.
Schoukens, J. and Ljung, L. (2019). Nonlinear system iden-
tification: A user-oriented roadmap. IEEE Control
Systems Magazine, 39(6):28–99.
Sebastian Thrun, e. a. (2006). Stanley: The robot that
won the DARPA Grand Challenge. Journal of Field
Robotics, 23(9).
Seegmiller, N., Rogers-Marcovitz, F., Miller, G., and Kelly,
A. (2013). Vehicle model identification by integrated
prediction error minimization. The International Jour-
nal of Robotics Research, 32(8).
Tangirala, A. K. (2015). Principles of System Identification:
Theory and Practice. CRC.
Toledo, J., Pi
˜
neiro, J. D., Arnay, R., Acosta, D., and Acosta,
L. (2018). Improving odometric accuracy for an au-
tonomous electric cart. Sensors, 18(1):200–2015.
Zhang, Z., Zhao, J., Huang, C., and Li, L. (2021). Learning
end-to-end inertial-wheel odometry for vehicle ego-
motion estimation. In 5th CAA International Confer-
ence on Vehicular Control and Intelligence.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
332
