
Dual-Arm Manipulation of a T-Shirt from a Hanger
for Feeding a Hem Sewing Machine
Filipe Almeida
1 a
, Gonc¸alo Le
˜
ao
1,2 b
, Carlos M. Costa
1,2 c
, Cl
´
audia D. Rocha
1 d
,
Armando Sousa
1,2 e
, Lara Gomes da Silva
3 f
, Lu
´
ıs F. Rocha
1 g
and Germano Veiga
1 h
1
Centre for Robotics in Industry and Intelligent Systems of INESC TEC, Porto, Portugal
2
Faculty of Engineering of the University of Porto, Porto, Portugal
3
ESI Robotics, Esmeriz, Portugal
fi
Keywords:
Dual-Arm Manipulation, Fabrics, Flexible Materials, Robot Handling, Sewing Automation, Textile Industry.
Abstract:
The textile industry is experiencing rapid advancement, reflected in the adoption of innovative and efficient
manufacturing techniques. The automation of clothing sewing systems has the potential to reduce the alloca-
tion of repetitive tasks to operators, freeing them for more value-added operations. There are several machines
on the market that automatically sew the bottom hem of T-shirts, a key component of the garment that fulfills
both functional and aesthetic purposes. However, most of them require the fabric to be positioned manually
by an operator. To address this issue, this work presents a solution to automate the process of feeding a T-
shirt into a SiRUBA sewing machine using a YuMi dual-arm robot. In this scenario, the T-shirt arrives at the
workstation with the main front and back pieces of cloth sewn together, seams facing out, and with no sleeves
yet. This setup starts by turning the garment inside out with the aid of an automated hanger, ensuring that
the seams are facing inward (as the machine requires), and then using the dual-arm robot to feed the garment
into the sewing machine. With our approach, the feeding and hemming process took less than 35 seconds,
with a feeding success rate of 98%. Therefore, this work can serve as a steppingstone towards more efficient
automated sewing systems within the garment production industry.
1 INTRODUCTION
Since the Industrial Revolution in the 18th century,
the textile industry has been one of the most pre-
dominant global industries. In subsequent decades,
the industry continued to grow rapidly in revenue and
employment, but created very low-quality labor stan-
dards. Over time, this inevitably led to most man-
ufacturing being outsourced to factories in develop-
ing countries, allowing lower labor and manufactur-
ing costs. The repetitive and tiring working condi-
tions of this industry remain a concern to this day,
a
https://orcid.org/0009-0000-1129-2916
b
https://orcid.org/0000-0002-9081-9268
c
https://orcid.org/0000-0001-8453-4031
d
https://orcid.org/0000-0001-7254-0346
e
https://orcid.org/0000-0002-0317-4714
f
https://orcid.org/0009-0006-8412-137X
g
https://orcid.org/0000-0002-8680-4290
h
https://orcid.org/0000-0003-3044-6938
and automation could provide a viable answer by al-
leviating some of the workload of factory workers.
The issue is that manipulating flexible objects, such
as textiles, remains a challenge for automation as their
shape changes as they are handled (Sanchez et al.,
2018; Zhu et al., 2022).
The process of manufacturing garments consists
of taking large rolls of fabric, cutting them into
smaller pieces, and sewing them together to obtain the
desired shape (Grishanov, 2011). There are already
several machines in the market that automate parts of
the process. The issue with these types of systems is
that the garment needs to be placed in a specific po-
sition for the machine to function properly. This cre-
ates a production line where several small processes
are automated, but require the operators to transfer the
garments between several machines, creating a very
repetitive and labor-intensive workload.
In the manufacturing of T-shirts, one important
step during assembly is the sewing of the bottom
hem. The bottom hemming step consists of folding
Almeida, F., Leão, G., Costa, C. M., Rocha, C. D., Sousa, A., Gomes da Silva, L., Rocha, L. F. and Veiga, G.
Dual-Arm Manipulation of a T-Shirt from a Hanger for Feeding a Hem Sewing Machine.
DOI: 10.5220/0013718300003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 93-104
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
93

up a small margin of the bottom tip of the T-shirt and
stitching it down. This hem is important for both aes-
thetic and functional purposes, namely, for maintain-
ing its shape more easily, preventing the bottom edge
from fraying and tearing, thus increasing durability
and adding a small weight for a smoother drape.
This paper presents a solution to automate the pro-
cess of feeding a T-shirt to a SiRUBA ASC-TBH200
(an automated bottom hem sewing machine). In this
scenario, the T-shirt arrives at the bottom hemming
process with the main front and back pieces of cloth
sewn together, seams facing out, and with no sleeves
yet, which corresponds to the typical state of the gar-
ment in this stage of production. Our approach starts
by turning the T-shirt inside out, so the seams are fac-
ing inward, as the machine requires, and then uses a
dual-arm ABB IRB 14000 YuMi robot to place the T-
shirt in the correct position. This setup was developed
for the EU-funded TexP@ct
1
project, which aims to
study the automation of several garment manufactur-
ing processes.
The paper is structured as follows. Section 2 re-
views related work on the use of robots to automate
sewing systems. Section 3 presents the cloth manip-
ulation system, including the robotic setup and the
grasp planning algorithm. Section 4 presents and dis-
cusses the experimental results of the robotic system.
Section 5 summarizes the findings and presents ideas
for future research.
2 RELATED WORK ON ROBOTIC
AUTOMATED CLOTH SEWING
There is already a body of research, spanning over 35
years (Gershon and Porat, 1988; Tokuda et al., 2024),
on the use of robot arms for automated cloth sewing
and assembly systems. Several approaches involving
feeding a cloth item into a sewing machine have been
developed, using either one or more robotic arms.
2.1 Approaches with One Robot Arm
Most of the related work resorts to a single-arm robot
to perform the sewing task.
(Gershon and Porat, 1988; Gershon, 1990) devel-
oped one of the first automated sewing systems within
the FIGARO project, where a PUMA 560 arm with
two spring-loaded, rubber-tipped grippers holds and
moves a cloth panel while it is being sewn in the other
end by a sewing machine. This setup is common to
most other approaches, in which the robot arm holds
1
https://texpact.pt
the cloth by one end while the sewing machine’s nee-
dle sews the cloth on the other end. The main differ-
ences between approaches lie in the hardware used
for the sewing arm, gripper and sensors, alongside
the approach used for motion planning. (Zacharia
et al., 2008; Zacharia, 2010) used fuzzy control to ad-
just the circular motions of a gripper around a nee-
dle. The gripper holds a cloth panel with curved
edges to a worktable during sewing. (Triantafyllou
et al., 2011) use a Selective Compliance Assembly
Robot Arm (SCARA) robot equipped with a pneu-
matic gripper to hold one edge of two plies of fabric
while the other edge is being sewn at an unknown ve-
locity. They use a Proportional–Derivative (PD) fuzzy
controller to move the gripper based on the difference
between the desired and measured force, according
to a force-torque sensor. (Koustoumpardis and As-
pragathos, 2014) improve this later work by adopt-
ing a hierarchical control loop where the force fuzzy
control is performed using an online trained neural
network, which is fed with an estimation of the fab-
ric’s extensibility given by an off-line trained neu-
ral network. (Misios et al., 2019) later further im-
proved on this work with a similar setup by obtaining
the desired tensional force of the robot on the fabric
via a Kelvin-Voigt non-linear model that emulates the
fabric’s physics based on estimations of the fabric’s
type and length. Finally, (Tang et al., 2024) control
a Denso VS-068 arm using a time-scaling model fed
with data from a high-speed camera, and force-torque
impedance control.
One single arm approach that differs from the oth-
ers was developed by (Arai et al., 1989), who instead
mounted a lightweight sewing machine on the robot
arm while the fabric to be sewn was hung in a fix-
ture. A proportional controller based on force feed-
back was used to move each of the robot arm’s joints.
2.2 Approaches with Multiple Robot
Arms
There is also research on the use of two robot arms
for sewing automation. This allows for a finer control
of the cloth but also requires coordinating both arms.
(Kudo et al., 2000) use two different robot arms,
a 4-axis SCARA robot and a 5-axis robot, both with
spring-loaded, rubber-tipped fingers, to hold the fab-
ric and move it while it was sewn by the sewing ma-
chine. (Schrimpf et al., 2012; Schrimpf and Wetter-
wald, 2012) use two UR5 arms to join the four leather
parts of a footstool cover. The use of two robot arms
allows for the parts to be held independently, which is
useful given that they have distinct geometries. They
later incorporated one extra arm in the layout for finer
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
94

material handling and to control the seam when re-
leasing it in front of the sewing machine, given that
the other two robot arms release the part beforehand
to avoid collision with the sewing machine (Schrimpf
and Mathisen, 2016). (Shungo and Hisashi, 2021)
use a horizontal dual-arm manipulator with rollers as
end effectors, which allow for wrinkles in the grasped
cloth to be eliminated more easily. Finally, (Tokuda
et al., 2024) use a DENSO VS-068 dual-arm to sew
two stacked fabric parts together along a desired seam
line printed on the top fabric part. Unlike all the pre-
vious work, rather than feeding the fabric part to the
sewing machine, they hold the fabric on both sides,
and the sewing head is solely used for stitching. This
allows the position and tension of the fabric parts to
be controlled exclusively by the dual-arm manipula-
tor.
Unlike the previous approaches, which use multi-
ple single-arm robots, (Sun et al., 2019) use the same
YuMi dual-arm robot model of this work to place a
cloth piece with holes on a fixture composed of ver-
tical locating pins. The cloth is then sent to a sewing
machine to be sewn, but it is not detailed in their work.
2.3 Comparison with this Work
In comparison with most of the literature, this work
proposes a novel solution as the robot arm does not
have to hold the fabric item during the sewing process,
which is instead inserted around two cylinders of the
sewing machine (similarly to (Sun et al., 2019), who
also rely on fixtures). A dual-arm hardware setup,
along with dual finger grippers, is used to have bet-
ter control over the garment, which is similar to most
of the related research. In addition, the T-shirt being
sewn has larger dimensions than those used in most
related work. As this manuscript corresponds to early
work with a novel robotic setup, no motion control
was performed.
3 CLOTH MANIPULATION
SYSTEM
The cloth manipulation system consists of several
components that work in unison to ensure the suc-
cessful hemming of the T-shirt. The entire system is
displayed in Figure 1. The following subsections pro-
vide details on each component and the final subsec-
tion details the robotic cell’s entire process in detail.
It should be highlighted that the robotic worksta-
tion developed in this work will be integrated into
a larger production cell, which will include another
robot that will pick up the 2 sides of the T-shirt from
a stack for sewing them together, after which the T-
shirt is inserted into a modified version of our T-shirt
holder (to allow it to alternate between a horizontal
configuration alongside the Yumi robot for inserting
the T-shirt and a vertical configuration in front of the
YuMi robot for turning it inside out), after which the
system and processes described in the following sub-
sections will be used to manipulate the T-shirt and
perform the hemming process. Therefore, in the com-
plete system, a human operator will not be required to
place the T-shirt in our workstation, since the entire
production process will be automated.
We developed this prototype to test our T-shirt
feeding approaches, but it will be improved and up-
graded for the integration in the final production cell.
Although it will have several modifications to make it
ready for industrial deployment, the current version is
enough for validating our T-shirt feeding approaches.
3.1 Sewing Machine
As previously stated, the SiRUBA ASC-TBH200
(Figure 2) is an automatic sewing machine that hems
the bottoms of T-shirts or other pieces of clothing
with similar shapes, such as polo shirts and long-
sleeve shirts. The basis for this system is a regu-
lar model of an interlock sewing machine fitted with
guiding wheels and cylinders that move the bottom of
the T-shirt through the machine. There are also sev-
eral sensors and air pressure actuators that shape the
hem throughout the sewing process. Once the T-shirt
is correctly placed, a button can be pressed to start
sewing, and the machine automatically detects when
the hem is finished, completing the cycle by releasing
the T-shirt.
The process of feeding the T-shirt to the sewing
machine, which is the focus of this paper, has three
main conditions to ensure the hem is properly sewn.
• Since the machine will sew the hem by pulling
the edge under the rest of the cloth, the T-shirt
needs to be inserted with the lateral seams fac-
ing inwards. As the T-shirt arrives at this produc-
tion stage in the opposite orientation, it needs to
be flipped inside-out.
• When feeding the machine, the two main cylin-
ders (in black in Figure 2) and all the parts be-
tween them need to stay inside the T-shirt. The
cloth should fit well around this structure, and al-
though it does not need to be perfectly aligned,
large wrinkles or folds should be avoided.
• The T-shirt detection sensor seen in Figure 3
needs to be activated by the bottom edge of the
T-shirt for the sewing to start. Once this sensor is
Dual-Arm Manipulation of a T-Shirt from a Hanger for Feeding a Hem Sewing Machine
95

Figure 1: Cloth manipulation system and all the individual components numbered in blue. Dual-arm ABB YuMi robot (1),
automatic sewing machine (2), hanger structure for initial placement of the T-shirt (3), vertical cylinder to move the hanger
(4), smaller cylinders to hold the T-shirt’s collar in place (5), side supports to open the bottom of the t-shirt.
Figure 2: Automatic sewing machine (SiRUBA ASC-
TBH200). Numbered in blue, the components are: left
cylinder that extends to the left side when a T-shirt is de-
tected (1), right cylinder with guiding wheels to rotate the
T-shirt (2), guiding platform that keeps the T-shirt straight
between the cylinders (3), presser foot and needles of the
sewing machine (4), T-shirt detection sensor (5).
activated, the left cylinder extends to stretch the
T-shirt and begin the hemming process. Ideally, at
this point, the cloth over the left cylinder is mostly
aligned with the one on the right.
If all these conditions are met, the placement of
the T-shirt does not need to be very precise, since the
machine, before starting to sew the fabric, rotates the
T-shirt around the cylinders and uses its sensors and
actuators in an attempt to align as well as possible
the bottom edge, to guarantee the hemming is done
correctly.
3.2 Hanger Structure
The structure that initially holds the T-shirt can be
seen in Figure 1. The basis for this structure functions
essentially as a regular hanger with side profiles for
additional support, ensuring a more predictable start-
ing position. To this structure, two components were
added for improving grasping repeatability.
• Two lateral supports were designed, 3D printed
and installed at the bottom of the vertical pro-
files, for ensuring that the robot had reliable and
fixed grasp zones in the T-shirt, as seen in Fig-
ure 4. Initially, the tests were conducted without
using these 2 supports, and the system was not
capable of having repeatable grasping points, re-
inforcing the importance of the addition of these 2
lateral supports for achieving higher grasping ro-
bustness. The bottom of the supports is larger in
width and depth, where it is in contact with the
bottom edge of the T-shirt, for separating both
sides of the edge of the T-shirt and for straight-
ening the T-shirt side facing the robot, creating a
good grasp point and enough free space for the
gripper to move through. From the bottom to the
top, the piece narrows using smooth surfaces, en-
suring that the T-shirt does not become entangled
or stuck in the structure.
• Two pneumatic cylinders were placed on top of
the hanger, for holding the T-shirt’s collar in place,
while it is being manipulated by the robotic arm.
The cylinders are placed along the same plane as
the hanger but are diagonally relative to the top
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
96

(a) Detection sensor not activated. (b) Detection sensor activated.
Figure 3: Sensor to detect the T-shirt’s presence in the sewing machine.
bar, ensuring that the tip of the pneumatic cylin-
ders are in contact with the profile, locking the
T-shirt in place, as seen in Figure 5. Holding the
T-shirt was critical for ensuring that it was turned
inside out correctly and reliably.
3.3 Dual-Arm Robot
The most practical way human beings manipulate
pieces of clothing is by using both hands, with two
grasping points near the extremities of the fabric’s
shape. As the sewing machine was designed for hu-
man usage, the most precise and time-efficient man-
ner to feed it with T-shirts is by using both arms to
guide the T-shirt. This allows the insertion in the left
and right cylinders to happen simultaneously, provid-
ing better coordination between the actions.
Creating a robotic system that can mimic human
behavior in this action requires a dual-arm setup. For
this task, the robot chosen was the ABB IRB 14000
YuMi (Figure 6), along with its parallel electric grip-
pers. This setup presents the following advantages:
• It already possesses a dual-arm setup fully inte-
grated and programmable, with tools to ease com-
munication between both arms. This means there
is no need for a dual robot setup.
• It is a collaborative robot, meaning it was de-
signed to work safely alongside humans. This
is important for textile factories, since they cur-
rently still rely on a lot of people working along-
side robots in their facilities.
• It has a 7-axis configuration on each arm, unlike
the typical 6-axis robots used in this field (Ger-
shon and Porat, 1988; Schrimpf et al., 2012; Tang
et al., 2024; Tokuda et al., 2024). The additional
joint is fairly similar to the elbow rotation in hu-
man arms and helps create movements similar to
humans.
• It is capable of fast and accurate movements with
a high repeatability. Making the process of feed-
ing the machine as fast as possible is crucial since
it is used for mass production. The YuMi robot
allows movements up to 1500 mm/s while main-
taining accuracy and safety guarantees.
Despite these advantages, some drawbacks need
to be considered for the application studied in this pa-
per, mainly related to its physical capabilities. On the
one hand, there is a limited payload capacity of 0.5 kg
per arm. Although that is sufficient to hold a regular
T-shirt, it does not allow a lot of stretching of the fab-
ric, which may be necessary for smaller T-shirt sizes
to fit into the sewing machine. On the other hand, the
robot’s reach is only 559 mm, which often forces it to
be used near its range limits, making reaching certain
poses more difficult.
3.4 Vertical Pneumatic Cylinder
The entire hanger structure presented in Section 3.2 is
supported by a vertical pneumatic cylinder with a 700
mm of course. This allows the T-shirt to be removed
from the hanger in a much more compact working
area, reducing the vertical size of the entire setup. It
also ensures that the hanger does not block the path
for the robot to feed the sewing machine once the T-
shirt is removed from it.
3.5 Sewing Machine Feeding Pipeline
Figure 7 portrays a full cycle performed by the robotic
cell and shows how all the components work together
to feed a T-shirt into the sewing machine.
The T-shirt starts by being manually placed in the
hanger, with the seams facing out and the vertical
cylinder in the highest position (Figure 7(a)). The bot-
tom edge of the T-shirt falls over the wider part of the
2 lateral structures, and the top pneumatic cylinders
are in the retracted position. The workcell then per-
forms the following sequence of steps:
1. The top pneumatic cylinders extend for locking
the top of the T-shirt in place (Figure 5(b)).
Dual-Arm Manipulation of a T-Shirt from a Hanger for Feeding a Hem Sewing Machine
97

(a) Lateral support. (b) Lateral support with T-shirt placed in the struc-
ture.
Figure 4: Lateral support structures added on each side to help find grasping points.
(a) Pneumatic cylinders in the retracted position. (b) Pneumatic cylinders extended for holding the T-
shirt.
Figure 5: Pneumatic cylinders on the hanger to hold the T-shirt in place.
Figure 6: ABB IRB 14000 YuMi dual-arm robot.
2. The robot starts moving its arms towards the pre-
grasp positions, underneath the T-shirt (prepro-
grammed for the T-shirt size).
3. The grippers then move slightly upwards to the
grasp points inside the 2 lateral supports. When
both are in the right position, the gripper closes
their fingers, grabbing the T-shirt (Figure 7(b)).
4. The vertical cylinder starts lowering while the
robot slowly moves the T-shirt upwards (Figures
7(c) and 7(d)). These opposing motions remove
the T-shirt from the hanger and by relying on the
pneumatic cylinders to hold the T-shirt, the robot
is able to turn the T-shirt inside-out reliably.
5. Once the T-shirt is out of the hanger, the robot
pushes it through the guiding cylinders of the
sewing machine with the grippers slightly above
the structure (Figure 7(e)). At this stage, since
the grasp points used in the T-shirt were slightly
shifted towards the robot from each lateral seam,
there should be enough fabric hanging underneath
so that it can pass around the cylinders without
getting stuck.
6. The left arm inserts the left side of the T-shirt all
the way through, releases it and moves out of the
way (Figure 7(f)).
7. The right arm carefully places the right side of the
T-shirt as forward as possible for ensuring that the
sewing machine sensor is activated (Figures 7(g)
and 7(h)). This will cause the left cylinder of the
sewing machine to extend and stretch the T-shirt
(which is why the left arm needs to finish and
move out of the way first, otherwise the sewing
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
98
machine left cylinder would collide with the left
robotic arm). The right arm then releases the T-
short and moves out of the way.
8. The top pneumatic cylinders then retract, releas-
ing the T-shirt from the hanger.
9. The sewing machine can now start the hemming
process.
4 EXPERIMENTAL RESULTS
This section begins by describing the T-shirts used for
the experiments, followed by the three types of tests
performed.
• Machine feeding tests, where the T-shirts are fed
to the machine (but not sewn), focused on mea-
suring the robotic operation’s time.
• Stress tests, where the T-shirts are displaced with
respect to their expected initial state in the hanger,
in order to evaluate the system’s robustness.
• Full sewing tests, where the full cycle time of
the robotic cell is evaluated, alongside the success
rate of correctly sewing the T-shirt. These metrics
are compared with two human operators.
A video of the robotic cell in operation was made
publicly available at the URL below
2
.
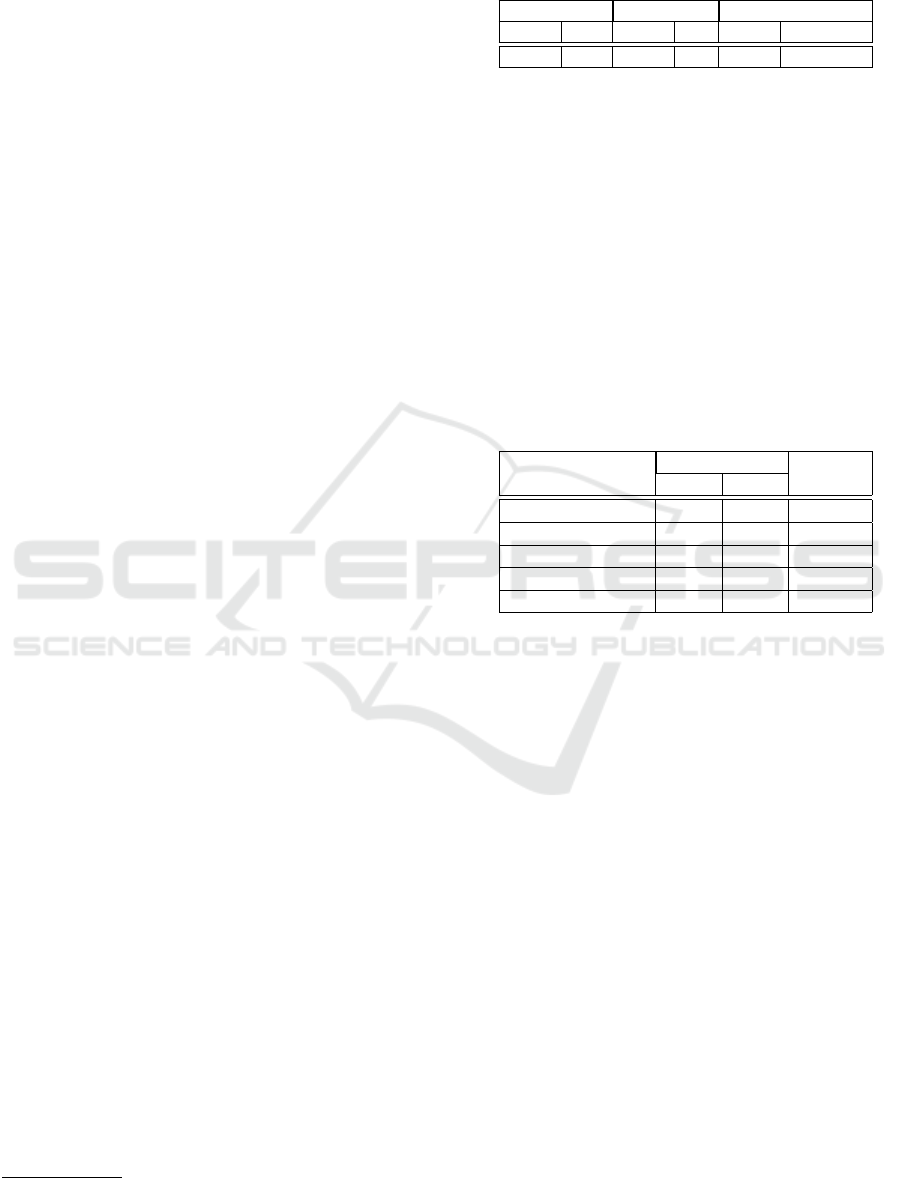
4.1 T-Shirts Testing Samples
All the T-shirts used in the experiments were identical
(depicted in Figure 8) and made of cotton fabric. For
the fabrication addressed studied in this paper, it is as-
sumed that the T-shirts arrive at this production stage
with no sleeves yet, so all the T-shirts used in our tests
were sleeveless. A total of 32 different T-shirts were
used in the tests. The mean and standard deviation for
their height and hip width (Figure 8), and curved edge
score are presented in Table 1. These measures cor-
respond to an XL-sized T-shirt, but results may vary
based on the comparison chart used.
After being handled for some time, the T-shirt fab-
ric starts to curl near the edges, which can introduce
some variance in the T-shirts. To quantify this curl,
a “curved edge score” was subjectively evaluated for
each T-shirt, indicating how rounded the bottom edge
was on a scale from 1 (least rounded) to 5 (most
rounded). As all the 32 T-shirts were never used in
prior experiments, this score tended to be low, as seen
in the last two columns of Table 1.
2
https://github.com/GoncaloLeao/Scientific-Research
Table 1: Mean and standard deviation (SD) for metrics re-
lated to the size and shape of 32 T-shirts.
Height (mm) Hip (mm) Curved edge score
Mean SD Mean SD Mean SD
795 5 577 8 1.56 1.01
4.2 Machine Feeding Tests
The sewing machine is designed for mass production
of garments in an industrial setting, and as such, we
tested our prototype under similar conditions. To sim-
ulate this scenario, the cycle described in Section 3.5
was repeated a total of 86 times. On every itera-
tion the time necessary to complete each stage were
recorded (grasping the T-shirt, pulling it out of the
hanger while flipping, inserting the left side, inserting
the right side, and total time), alongside the success
rates. These results are presented in Table 2.
Table 2: Performance metrics for some steps of the T-shirt
feeding process (detailed in subsection 3.5), over 86 runs.
Steps
Time (s)
Success
rate
Mean SD
Grasp (1-3) 2.242 0.013 1
Lower hanger (4) 2.234 0.013 1
Insert left (5-6) 2.798 0.022 0.98
Insert right (7) 2.186 0.015 1
Total (1-8) 9.461 0.031 0.98
From the results, some conclusions can be drawn.
• A total of 84 of the 86 tests were successful, which
shows that the setup can consistently perform the
T-shirt feeding task.
• The only 2 tests that failed had the same issue,
that was excessive force in one of the robotic arm
joints while pushing the T-shirt towards the ma-
chine. The most likely cause for these failures
could be a slight desynchronization between the
start of the motions of the left and right robotic
arms. This stretches the T-shirt, provoking the ex-
cessive force on the joints of the robot.
• All the robotic arm movements were done at the
maximum possible speed, limited either by the
motors’ maximum speed or the payload, except
the ones close to the sewing machine, to guarantee
precision. Moreover, both arms’ tasks were coor-
dinated to be performed simultaneously whenever
it was possible to do so. This allowed the total
cycle time to be lowered to under 10 seconds.
• The robot takes approximately the same time run-
ning the cycle without grabbing the T-shirt, mean-
ing the weight does not affect the motor’s perfor-
mance significantly. This is the most likely expla-
Dual-Arm Manipulation of a T-Shirt from a Hanger for Feeding a Hem Sewing Machine
99

(a) Initial position. (b) Grasping.
(c) Flipping the T-shirt inside out. (d) T-shirt flipped inside out.
(e) Starting insertion into sewing machine. (f) Inserting left arm.
(g) Inserting right arm. (h) Activation of sewing machine sensor.
Figure 7: Sewing machine feeding pipeline.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
100
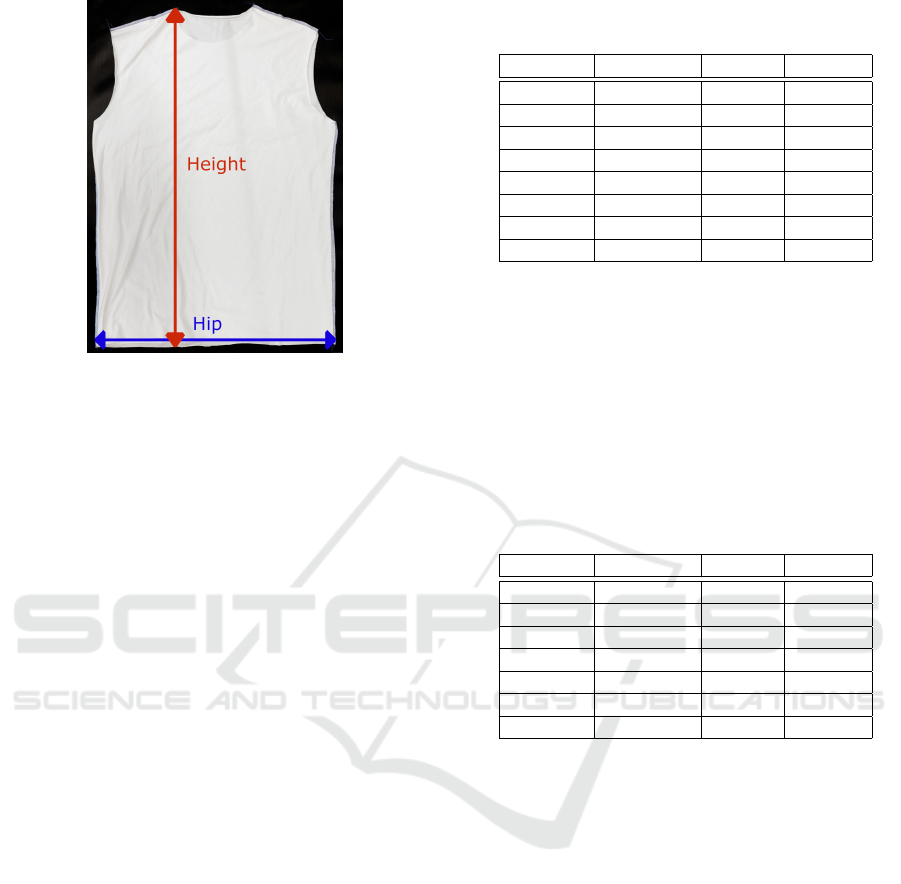
Figure 8: Example of a T-shirt’s height and hip width.
nation for the low standard deviation values for
the execution time.
• All the 32 T-shirts were used 2 or 3 times, half
of them with the front facing the robot and the
other half facing the sewing machine. Neither the
variations in the T-shirts nor the rotation appeared
to have any effect on the time or success rate.
4.3 Stress Tests
Since the setup is dependent on the starting position
of the T-shirt when it is placed in the hanger, it is im-
portant to know how much margin of error there is
when placing the T-shirt in the initial pose. To retrieve
some data on this metric, some stress tests were per-
formed that increasingly introduced more variation in
the starting state, to try to find possible points of fail-
ure. This section will present those variations and the
results obtained.
The first test consisted of adding a horizontal shift
to the T-shirt. This was achieved by moving the T-
shirt collar on top of the hanger so that the point that
meets the lateral seam of the T-shirt with the bottom
edge is at a certain distance from the lateral supports,
as seen in Figure 9(a). The results of this experiment
are presented in Table 3.
Despite the large shifts, the tests remained suc-
cessful, and the cycle times were unaffected. It is
important to note that the larger the shift, the more
likely it becomes that the top cylinders of the hanger
are no longer capable of holding the T-shirt in place
due to the shape of the collar. This will cause the setup
to lose some control of the T-shirt and can prevent
it from flipping properly, creating a possible point of
failure. Even considering this, the shifts tested were
very significant, so it is possible to say that the system
Table 3: Stress testing the setup by rotating the T-shirt hor-
izontally.
Direction Shift (mm) Result Time (s)
Right 60 Success 9.492
Right 110 Success 9.518
Right 160 Success 9.480
Right 210 Success 9.483
Left 60 Success 9.484
Left 110 Success 9.495
Left 160 Success 9.462
Left 210 Success 9.505
is very resilient to horizontal shifting.
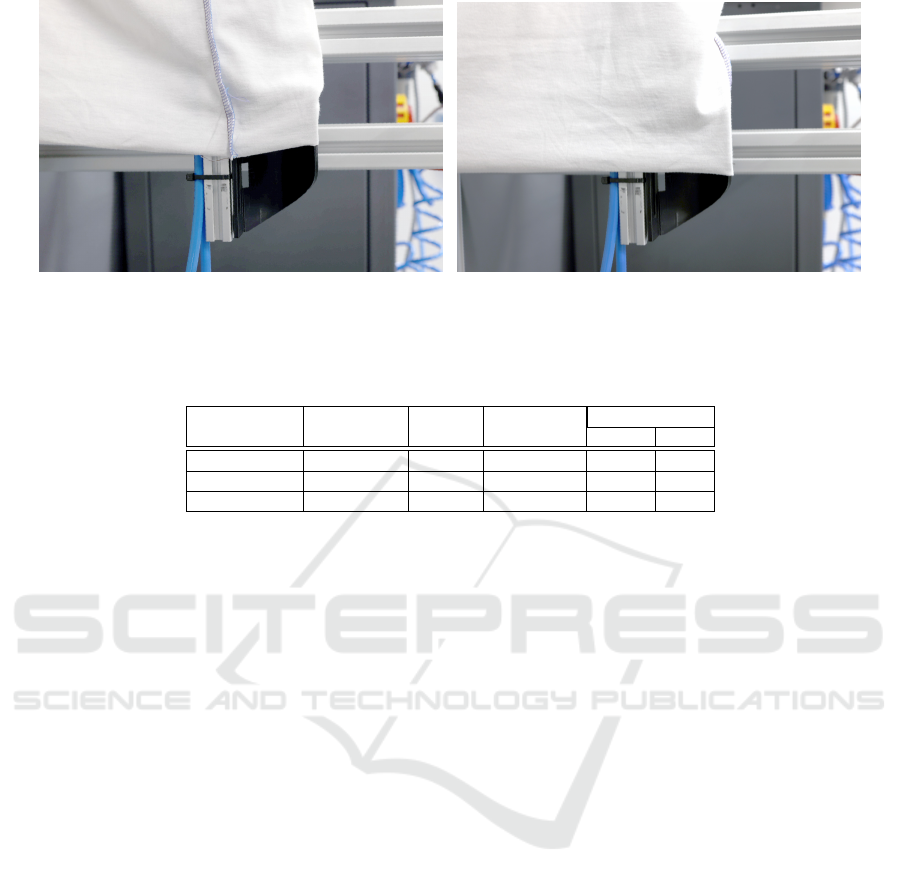
The following experiment was to attempt a verti-
cal shift of the position where the bottom edge of the
T-shirt sits on the lateral supports. This was achieved
by pulling up or pushing down the edge of the T-shirt,
as seen in Figure 9(b), and letting it hold itself in po-
sition with the friction with the hanger, as can happen
accidentally when placing the T-shirt at the start. Ta-
ble 4 shows the results of these tests.
Table 4: Stress testing the setup by shifting the bottom edge
of the T-shirt vertically.
Direction Shift (mm) Result Time (s)
Up 10 Success 9.456
Up 20 Success 9.438
Up 30 Failed -
Down 10 Success 9.426
Down 20 Success 9.438
Down 30 Success 9.426
Down 40 Success 9.436
When pulling the T-shirt up, the problem that first
occurred at 30 mm was that the grip achieved was too
weak, and the robot dropped the T-shirt when pulling
it out of the hanger. Pushing the T-shirt down does not
result in a failure to feed the machine, but it causes
the robot to grab too much fabric. It ends up placing
the T-shirt too close to the sensor, which can lead to
problems with the hemming process. The system is
much more sensitive to vertical shifts. Future itera-
tions of the prototype should include a way to adjust
the height of the grasping points.
4.4 Sewing Tests with Human
Comparison
Although this paper focuses more on the automated
feeding process, it is also necessary to ensure that the
T-shirt’s placement in the hanger is good enough for
a successful hemming. To evaluate this stage, after
being inserted by the robot, a total of 21 T-shirts were
sewn, and the results were observed. To get a base-
Dual-Arm Manipulation of a T-Shirt from a Hanger for Feeding a Hem Sewing Machine
101
(a) Placement with horizontal shift (pulled to the left). (b) Placement with vertical shift (pulled down).
Figure 9: Examples of placements from the stress tests.
Table 5: Performance metrics for a set of sewing tests performed by the prototype and the experienced/unexperienced opera-
tors (using solely the sewing machine).
Operator
Num.
experiments
Success
rate
Perfect hem
rate
Time (s)
Mean SD
Inexperienced 10 0.7 0.6 18.865 3.461
Experienced 10 0.9 0.8 9.573 2.079
Prototype 21 0.76 0.67 9.445 0.024
line of comparison, another 20 tests were done with
a person performing the same procedure of picking
up the T-shirt, flipping it, and inserting it into the ma-
chine. Half of these tests were done by an operator
with more experience with the sewing machine, and
the other half by one with less experience. Table 5
shows the results for this experiment.
From the analysis of these results we can conclude
the following:
• Regarding the time of insertion, there is a signif-
icant difference between an experienced (9.573
seconds) and an inexperienced person (18.865
seconds). As the mean and standard deviation re-
sults show, with more practice, operators can get
faster and achieve better success rate.
• The prototype has a very similar mean time (9.445
seconds) when compared to an experienced opera-
tor (9.573 seconds). The operator can perform the
task faster (fastest time was 8.0 seconds), but it is
very hard to do it consistently, as demonstrated by
the standard deviations. Over time, the average
times seem to even out.
• The sewing machine operation times were also
registered, with the sewing of the hem taking on
average 20.7 seconds. This makes the complete
hem sewing process take around 30 seconds.
• As for the success rate, the prototype performed
better than an inexperienced operator but not as
well as an experienced one.
• Some tests were considered successful even if the
hem had some flaws. Perfect hem rate only con-
sidered the ones where no defects were found,
such as the one in Figure 10.
• Compared to the overall success rate, it decreases
consistently for all operators by around 0.1 sec-
onds, which is probably due to the fine-tuning of
the sewing machine.
• Most of the prototype failures seem to be due to
excess fabric being pushed beyond the sensor on
the sewing machine (5 on 21 tests). This caused
the machine to not properly align the hem fold of
the T-shirt and to sew either with no fold or too
many folds (Figure 11(a)).
• Other defects were incomplete hem in which the
sewing did not catch the inside of the hem (1 on
21 tests) in some sections (Figure 11(b)) and also
misalignment at the end of the hem (1 on 21 tests)
(Figure 11(c)).
5 CONCLUSIONS
The main contribution of this work was a robotic sys-
tem that is able to sew the bottom hem of a T-shirt
using an industrial sewing machine and a dual-arm
robotic arm. Although fabric manipulation is a very
difficult problem which requires precise manipulation
and grasping, our prototype performed this task effi-
ciently and consistently, achieving a T-shirt feeding
success rate of 98%.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
102

(a) Hem. (b) Hem ends overlapping correctly.
Figure 10: Example of a correct hemming done by the sewing machine.
(a) Hem sewing failure due
to excessive folding of the
fabric.
(b) Hemming did not fully catch
the fabric.
(c) Hemming did not have cor-
rect overlap at the end.
Figure 11: Examples of hemming failures.
The experimental results provided some general-
ized insights into fabric manipulation. For indus-
trial applications, focused on speed and repeatability,
robotic manipulation alone can pose some problems
due to the unpredictability of the material. In this pro-
totype, the most successful solution relied on mechan-
ical holding and guiding components. One of them is
the top pneumatic cylinders that hold the T-shirt col-
lar on the hanger, which, in combination with the two
grippers, create a total of four grasping points, well
distributed along the T-shirt. The conclusion is that
the more the T-shirt is constrained, the less loose fab-
ric will exist, leading to more repeatable manipulation
of the T-shirt. Another phenomenon that can be used
is the fact that, when a fabric is stretched, it transitions
from being deformable to having more elastic proper-
ties, creating a much more consistent shape. The 2
lateral supports of our prototype that take advantage
of this effect, which stretch the fabric in the bottom
edge to ensure good grasping points.
This work opens several lines of future work,
where this robotic workcell can be improved. First
of all, our prototype that feeds the sewing machine
will also need to be fed, which is not a trivial prob-
lem. Namely, another workcell will be performing
the sewing of the side of the T-shirt, after which will
feed it to our hanger.
Secondly, grasp and motion planning can be per-
formed, rather than using fixed grasp points and post-
grasp robot motions for both arms. Providing the sys-
tem with perception capabilities is the best solution
as it would both allow the system to work with dif-
ferent T-shirt sizes, and make it more robust against
potential defective initial T-shirt placements, fixing
the problem shown in Section 4.3. This way, the
robot could also have better and more reliable grasp-
ing points, avoiding the problem described in Section
4.4, of too much fabric going over the sensor.
Thirdly, a different robot arm could be used for
manipulation. Although ABB YuMi presented a lot
of advantages, its low payload and limited reach were
the two main issues. There are plenty of alternatives
that could be considered and that could result in im-
provements in reliability and speed. Alternatives in-
clude other dual-arm robot models, but also a pair of
single-arm robots, similar to most of the related work
Dual-Arm Manipulation of a T-Shirt from a Hanger for Feeding a Hem Sewing Machine
103

presented in Section 2.2.
Finally, it could also be interesting to have one
robot operating several sewing machines at the same
time. Namely, while one machine is sewing, the dual-
arm can rotate 180º and feed another sewing machine
or the dual-arm can be mounted on a track and feed
several sewing machines.
ACKNOWLEDGEMENTS
This work is co-financed by Component 5 - Capital-
ization and Business Innovation, integrated in the Re-
silience Dimension of the Recovery and Resilience
Plan within the scope of the Recovery and Resilience
Mechanism (MRR) of the European Union (EU),
framed in the Next Generation EU, for the period
2021 - 2026, within project TEXPACT, with reference
61.
The authors would also like to thank Vitor Tavares
Santos (from INESC TEC) for all the high-quality
photos and the edition of the video showcasing the
robotic cell.
REFERENCES
Arai, T., Nakamura, T., and Sato, M. (1989). Auto-
mated sewing with direct drive manipulator. In
IFAC/IFIP/IFORS/IMACS Symposium on Information
Control Problems in Manufacturing Technology, vol-
ume 23, pages 365–370. Elsevier.
Gershon, D. (1990). Parallel process decomposition of a
dynamic manipulation task: Robotic sewing. IEEE
Transactions on Robotics and Automation, 6:357–
367.
Gershon, D. and Porat, I. (1988). Vision servo control of a
robotic sewing system. In IEEE International Con-
ference on Robotics and Automation (ICRA), pages
1830–1835. IEEE.
Grishanov, S. (2011). Structure and properties of textile
materials, pages 28–63. Elsevier.
Koustoumpardis, P. N. and Aspragathos, N. (2014). In-
telligent hierarchical robot control for sewing fab-
rics. Robotics and Computer-Integrated Manufactur-
ing (RCIM), 30:34–46.
Kudo, M., Nasu, Y., Mitobe, K., and Borovac, B. (2000).
Multi-arm robot control system for manipulation of
flexible materials in sewing operation. Mechatronics,
10:371–402.
Misios, I. H., Koustoumpardis, P. N., and Aspragathos, N.
(2019). Gain scheduled pid force control of a robotic
arm for sewing fabrics. In International Conference
on Robotics in Alpe-Adria Danube Region (RAAD),
volume 980, pages 104–114. Springer.
Sanchez, J., Corrales, J. A., Bouzgarrou, B. C., and
Mezouar, Y. (2018). Robotic manipulation and sens-
ing of deformable objects in domestic and indus-
trial applications: a survey. International Journal of
Robotics Research, 37:688–716.
Schrimpf, J. and Mathisen, G. (2016). Differential feed con-
trol applied to corner matching in automated sewing.
In IEEE International Conference on Robotics and
Automation (ICRA), pages 3894–3900. IEEE.
Schrimpf, J. and Wetterwald, L. E. (2012). Experiments to-
wards automated sewing with a multi-robot system. In
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 5258–5263. IEEE.
Schrimpf, J., Wetterwald, L. E., and Lind, M. (2012). Real-
time system integration in a multi-robot sewing cell.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages 2724–2729. IEEE.
Shungo, T. and Hisashi, D. (2021). Development of fab-
ric feed mechanism using horizontal articulated dual
manipulator for automated sewing. In IEEE Interna-
tional Conference on Automation Science and Engi-
neering (CASE), volume 2021-August, pages 1832–
1837. IEEE.
Sun, P., Hu, Z., and Pan, J. (2019). A general robotic frame-
work for automated cloth assembly. In IEEE Interna-
tional Conference on Advanced Robotics and Mecha-
tronics (ICARM), pages 47–52. IEEE.
Tang, K., Tokuda, F., Seino, A., Kobayashi, A., Tien, N. C.,
and Kosuge, K. (2024). Time-scaling modeling and
control of robotic sewing system. IEEE/ASME Trans-
actions on Mechatronics, 29:3166–3174.
Tokuda, F., Murakami, R., Seino, A., Kobayashi, A.,
Hayashibe, M., and Kosuge, K. (2024). Fixture-free
2d sewing using a dual-arm manipulator system. IEEE
Transactions on Automation Science and Engineer-
ing, 22:7927–7940.
Triantafyllou, D., Koustoumpardis, P. N., and Aspragathos,
N. (2011). Model reference fuzzy learning force con-
trol for robotized sewing. In Mediterranean Confer-
ence on Control & Automation (MED), pages 1460–
1465. IEEE.
Zacharia, P., Mariolis, I. G., Aspragathos, N., and Der-
matas, E. (2008). Robot-handling fabrics with curved
edges based on visual servoing and polygonal ap-
proximation. Journal of Engineering Manufacture,
222:1263–1274.
Zacharia, P. T. (2010). An adaptive neuro-fuzzy inference
system for robot handling fabrics with curved edges
towards sewing. Journal of Intelligent and Robotic
Systems, 58:193–209.
Zhu, J., Cherubini, A., Dune, C., Navarro-Alarcon, D.,
Alambeigi, F., Berenson, D., Ficuciello, F., Harada,
K., Kober, J., Li, X., Pan, J., Yuan, W., and Gienger,
M. (2022). Challenges and outlook in robotic manip-
ulation of deformable objects. IEEE Robotics and Au-
tomation Magazine, 29:2–12.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
104
