
Simultaneous Learning of State-to-State Minimum-Time Planning and
Control
Swati Dantu
a
, Robert P
ˇ
eni
ˇ
cka
b
and Martin Saska
c
Department of Cybernetics, Faculty of Electrical Engineering, Czech Technical University in Prague, Czech Republic
Keywords:
Unmanned Aerial Vehicle, Planning and Control, Reinforcement Learning.
Abstract:
This paper tackles the challenge of learning a generalizable minimum-time flight policy for UAVs, capable of
navigating between arbitrary start and goal states while balancing agile flight and stable hovering. Traditional
approaches, particularly in autonomous drone racing, achieve impressive speeds and agility but are constrained
to predefined track layouts, limiting real-world applicability. To address this, we propose a reinforcement
learning-based framework that simultaneously learns state-to-state minimum-time planning and control and
generalizes to arbitrary state-to-state flights. Our approach leverages Point Mass Model (PMM) trajectories
as proxy rewards to approximate the true optimal flight objective and employs curriculum learning to scale
the training process efficiently and to achieve generalization. We validate our method through simulation
experiments, comparing it against Nonlinear Model Predictive Control (NMPC) tracking PMM-generated
trajectories and conducting ablation studies to assess the impact of curriculum learning. Finally, real-world
experiments confirm the robustness of our learned policy in outdoor environments, demonstrating its ability to
generalize and operate on a small ARM-based single-board computer.
1 INTRODUCTION
Unmanned Aerial Vehicles (UAVs) are becoming in-
creasingly used in applications that benefit from fast
and agile flight between given goals, such as inspec-
tion (Chung et al., 2021), surveillance (Tsai et al.,
2023), and humanitarian search and rescue (Alotaibi
et al., 2019). In these scenarios, the ability to fly be-
tween desired positions as quickly as possible is cru-
cial for maximizing efficiency. The problem of flying
a drone to a target location in minimum time typically
involves two key aspects: (1) planning a minimum-
time trajectory and (2) controlling the drone such that
it accurately follows the planned trajectory. Success-
fully solving this problem allows UAVs to navigate at
high speeds and thus efficiently finish e.g. an inspec-
tion mission.
Solving for planning and control together while
achieving minimum-time flight is, however, challeng-
ing due to several fundamental reasons. UAVs have
highly nonlinear dynamics and must be controlled at
the edge of their actuation limits to achieve the fastest
a
https://orcid.org/0009-0003-8895-3462
b
https://orcid.org/0000-0001-8549-4932
c
https://orcid.org/0000-0001-7106-3816
possible motion. Unlike stable hovering or slow navi-
gation, agile flight demands precise control under ex-
treme conditions, where any model mismatches or ex-
ternal disturbances can lead to catastrophic failures.
A significant challenge remains in designing an algo-
rithm, in our case a learning-based planner-controller
leveraging Deep Reinforcement Learning (DRL), that
can generalize to arbitrary starting and ending states,
and thus can solve simultaneously the state-to-state
planning and control for general purpose flight. This
is in contrast, e.g., with existing learning-based ap-
proaches for UAV racing (Kaufmann et al., 2023) that
have been designed to work only with predefined gate
sequences.
Prior work on learning-based UAV flight has pri-
marily focused on specific racing scenarios (Kauf-
mann et al., 2023), achieving impressive performance
but failing to generalize beyond small deviations in
predefined tracks (Song et al., 2021a). While recent
advances demonstrate the ability to learn flight poli-
cies in a matter of seconds (Eschmann et al., 2024) or
adapt to different UAV configurations (Zhang et al.,
2024), these approaches have been validated only un-
der near-hover conditions or moderate speeds. The
key limitation remains the lack of a robust, learning-
based minimum-time planner-controller that can gen-
Dantu, S., P
ˇ
eni
ˇ
cka, R. and Saska, M.
Simultaneous Learning of State-to-State Minimum-Time Planning and Control.
DOI: 10.5220/0013716800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 283-291
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
283

Figure 1: Illustration from real-world flight: quadrotor in
flight using proposed learned policy.
eralize to arbitrary start-goal positions while main-
taining agility in general flight conditions.
To bridge this gap, we propose a approach for
learning-based minimum-time flight by effectively
solving both planning and control with a single pol-
icy that generalizes to arbitrary start-goal configura-
tions. We leverage Deep Reinforcement Learning ap-
proach that incorporates two key ideas: (1) leveraging
Point Mass Model (PMM) trajectories as proxy re-
wards, ensuring that the learning objective closely ap-
proximates the true performance metric of minimum-
time flight (Teissing et al., 2024), and (2) employing
a curriculum learning strategy to progressively scale
the learning process, enabling the policy to handle in-
creasingly large position variations in agile flight and
at the same time be able to hover smoothly. To the
best of our knowledge, this is the first work that in-
tegrates these concepts into a reinforcement learning
framework for UAV minimum-time flight, achieving
a balance between hovering stability and high-speed
manoeuvrability.
We evaluate the proposed approach in both sim-
ulation and real-world experiments. In simulation,
we compare our learned policy against Nonlinear
Model Predictive Control (NMPC) tracking PMM-
generated trajectories over various maneuvers, in-
cluding straight-line, zigzag, and semicircular paths,
demonstrating comparable flight times while main-
taining more stable execution. We show that the cur-
riculum learning significantly improves convergence
and performance compared to conventional reinforce-
ment learning. Finally, real-world tests validate our
policy’s robustness in outdoor environments, show-
casing its ability to control a small agile drone with
limited compute power as shown in Figure 1.
2 RELATED WORKS
Recently, learning-based approaches have shown
promising outcomes for diverse tasks of minimum-
time planning and control. One of the learning-
based approaches (Song et al., 2021b), designed for
drone racing scenarios, leverages deep reinforcement
learning framework with additional privileged infor-
mation for high-speed racing drones reaching speeds
of ∼17m/s to navigate through gates autonomously.
Similarly, (Song et al., 2023) additionally include per-
ception awareness for navigation in cluttered envi-
ronments to optimize for flight efficiency and visual
awareness. Perception awareness has also shown re-
markable progress in drone racing (Kaufmann et al.,
2023) to achieve performance at the level of the best
human pilots. However, these works have been only
designed for specific race tracks with minimum per-
turbations (as seen in (Song et al., 2021b)) and do not
generalize for state-to-state agile flight.
The prior methods are limited to a single task of
navigation through race tracks. To address this limita-
tion, (Xing et al., 2025) presented a multi-Task DRL
framework with a shared physical dynamics across
tasks through shared actor and separate critic for each
task. The authors provided a single policy that is ca-
pable of performing multiple tasks: stabilizing, track-
ing a racing trajectory, and velocity tracking, without
the need for separate policies. Yet, without an explicit
transition mechanism between different flight modes
(e.g., switching between tracking a racing trajectory
and stabilizing task mid-flight).
Learning-based control methods have also been
shown to adapt to different quadrotor dynamics with-
out manual tuning. The work presented in (Zhang
et al., 2023) introduces a DRL based near-hover posi-
tion controller that adjusts control gains in real-time
that showed a rapid adaptation to quadrotors with
mass variations up to 4.5 times along with distur-
bances such as external force, payloads or disparities
in drone parameters. The authors of (Zhang et al.,
2024) combined imitation learning (for a warm start)
and reinforcement learning to fine-tune control in re-
sponse to changing dynamics. This work demon-
strated adaptation to disturbances arising from an off-
center payload and external wind for quadrotors with
mass differences and various propeller constants.
Deep reinforcement learning has also shown im-
mense promise for landing a quadrotor. The authors
of (Kooi and Babuška, 2021) illustrated landing of a
quadrotor on an inclined surface by using PPO with
sparse rewards. Prior to this, (Polvara et al., 2018)
presented the use of DRL for landing on ground mark-
ers with low resolution images, while (Rodriguez-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
284

Ramos et al., 2019) showed the possibility of landing
on a moving platform.
The work presented in (Eschmann et al., 2024)
elucidated the feasibility of real-time learning by
training an off-policy asymmetric actor-critic RL
framework within 18s on a consumer-grade laptop
with demonstration of successful real-world flight
with minimal tuning. Previously, (Hwangbo et al.,
2017) successfully showed waypoint following using
an approach based on Deterministic Policy Optimiza-
tion (DPG). However, the aforementioned methods do
not consider the minimum-time objective. Our pro-
posed algorithm tackles this problem by designing a
learning-based planner-controller optimized for min-
imizing time, capable of generalizing across varying
start and goal positions. Our policy is not restricted
to a single task, capable of seamlessly transitioning
between waypoint flight and stable hovering.
3 PROBLEM FORMULATION
AND METHODOLOGY
In this section we present the quadrotor dynamics
considered during the training and deployment of our
proposed method, formulate the control problem and
explain the choice of observation and action spaces
together with design of applied rewards.
3.1 System Dynamics
The quadrotor is modeled with state x =
[p, q, v, ω, Ω]
T
which consists of position p ∈ R
3
,
velocity v ∈ R
3
, unit quaternion rotation q ∈ SO(3),
body rates ω ∈ R
3
, and the rotors’ rotational speed
Ω. The dynamics equations are
˙
p = v , (1a)
˙
q =
1
2
q ⊙
0
ω
, (1b)
˙
v =
R(q) (f
T
+ f
D
)
m
+ g , (1c)
˙
ω = J
−1
(τ − ω ×Jω) , (1d)
where ⊙ denotes the quaternion multiplication, R(q)
is the quaternion rotation, f
D
is the drag force vector
in the body frame, m is the mass, J is diagonal inertia
matrix, and g denotes Earth’s gravity. The speeds of
the propellers Ω are modelled as a first-order system,
˙
Ω =
1
k
mot
(Ω
c
− Ω) with Ω
c
being the commanded
speed and k
mot
the time constant.
The collective thrust f
T
and torque τ
b
are calcu-
lated as:
f
T
=
0
0
P
f
i
, (2)
τ =
l/
√
2 (f
1
− f
2
− f
3
+ f
4
)
l/
√
2 (−f
1
− f
2
+ f
3
+ f
4
)
κ (f
1
− f
2
+ f
3
− f
4
)
, (3)
where κ is the torque constant and l is the arm length.
Here, individual motor thrusts f
i
are functions of the
motor speeds using the thrust coefficient c
f
,
f
i
(Ω) =
c
f
· Ω
2
. (4)
3.2 Task Formulation
The minimum-time planning and control problem is
formulated in the reinforcement learning (RL) frame-
work using a Markov Decision Process (MDP) repre-
sented as a tuple (S, A, P, R, γ). The action a
t
∈ A
is executed at every time step t to transition the agent
from the current state s
t
∈ S to next state s
t+1
with
the state transition probability P(s
t+1
|s
t
, a
t
) receiv-
ing an immediate reward r
t
∈ R.
The objective of deep reinforcement learning is to
optimize the parameters θ of a neural network policy
π
θ
so that the learned policy maximizes the expected
discounted reward. The objective function is formu-
lated as
π
∗
θ
= arg max
π
E
"
∞
X
t=0
γ
t
r
t
#
. (5)
3.3 Observation and Action Spaces
The observation space is defined as the vector o
t
=
[v
t
, R
t
, p
t
, ω
t
, ϕ
t
, a
t−1
] ∈ R
23
which corresponds to
linear velocity of the quadrotor, rotation matrix, rela-
tive position of the quadrotor to that of the goal posi-
tion, input body rates around each axis of the quadro-
tor, relative heading of the quadrotor to that of the
goal and the action executed at the previous time step.
The agent is such that the observation is mapped
to the action consisting of collective thrust and body
rates around each of the axes. This defines the action
space to be a
t
= [τ
t
, ω
c
xt
, ω
c
yt
, ω
c
zt
].
3.4 Reward Shaping
The objective of deep reinforcement learning is to
maximize the cumulative discounted reward. To this
end, our rewards consist of two main components,
one direct, simple function-based rewards for posi-
tion and velocity, and one capturing proxy reward
Simultaneous Learning of State-to-State Minimum-Time Planning and Control
285

via the usage of point-mass model (PMM)(Teissing
et al., 2024) trajectories to consider the minimum-
time state-to-state objective.
3.4.1 Direct Rewards
These rewards are designed to consider various as-
pects that are crucial for both hovering and the
minimum-time state-to-state objective. In this paper,
we consider total direct reward (r
D
) to be the sum of
the following components.
• Distance to Goal: r
g
= K
g
1 −
∥p
t
−p
g
∥
G
• Heading: r
ϕ
= K
ϕ
|ϕ
t
− ϕ
g
|
• Stay at Goal: r
s
= K
s
(s
p
· s
g
), where s
p
=
∥p
t
− p
t−1
∥, s
g
= ∥p
t
− p
g
∥
• Acceleration: r
a
= K
a
∥a
t
∥
• Angular Velocity: r
ω
= K
ω
ω
t
• Thrust Smoothing: r
τ
= K
τ
|τ
t
− τ
t−1
|
• Commanded Angular Velocity: r
c
= K
c
|ω
c
t
−
ω
c
t−1
|,
where p ∈ R
3
, a
t
∈ R
⊯
, ϕ
t
∈ [−π, π], ω
t
∈ R
⊯
are
the current position, acceleration, heading and angu-
lar acceleration of the UAV at time t, p
g
∈ R
3
, ϕ
g
∈
[−π, π] are the position and heading of the desired
goal. G is the acceptable convergence radius from the
goal point. ω
c
t
∈ R
3
, ω
c
t−1
∈ R
3
are the commanded
velocities and τ
t
, τ
t−1
are the commanded thrusts at
times t, t − 1. K
g
, K
ϕ
, K
s
, K
a
, K
ω
, K
τ
, K
c
are the
scaling factors.
The Distance to Goal reward acts as an indica-
tor for the quadrotor to move towards the goal, which
is especially valuable during the exploration phase.
Heading reward awards if the quadrotor moves to-
wards the heading goal and penalises it if not by a
factor of the absolute difference between the current
heading and the goal heading. The Stay at Goal re-
ward keeps the quadrotor at the goal by rewarding
if the movement direction vector of the quadrotor is
aligned with the vector towards the goal. The Acceler-
ation and Angular Velocity rewards penalize if either
of these quantities are too high. These rewards are
essential in finding the balance between stable hover-
ing and agile start-to-goal flight. We observed that, in
the absence of these penalties, the quadrotor demon-
strated effective agile start-to-goal flight but failed to
maintain stable hovering. These reward components
are crucial for enabling consistent multi-goal behav-
ior. The Thrust Smoothing and Commanded Angu-
lar Velocity rewards are temporal smoothing rewards.
They penalise the quadrotor if the change is too high
within immediate time steps of particular commanded
values. This ensures the outputs of the policy do not
contain any sharp perturbation which could cause in-
stability during flight.
3.4.2 Proxy Reward with PMM
In order to drive the minimum state-to-state objec-
tive, we use trajectories generated by the PMM plan-
ner (Teissing et al., 2024) to compute proxy reward
to closely approximate the true performance objec-
tive while providing feedback at every time step.
The proxy reward is also instrumental in combining
the planning and control objective for the learning
process. The PMM planner planner generates the
minimum-time trajectories over multiple waypoints
within milliseconds by utilizing a point-mass model
of the UAV combined with thrust decomposition al-
gorithm that enables the UAV to utilize all of its col-
lective thrust.
A time-optimal PMM trajectory segment can be
described as:
p
1
= p
0
+ v
0
t
1
+
1
2
a
1
t
2
1
, v
1
= v
0
+ a
1
t
1
,
p
2
= p
1
+ v
1
t
2
+
1
2
a
2
t
2
2
, v
2
= v
1
+ a
2
t
2
,
(6)
where p
0
, v
0
∈ R are the start position and velocity,
p
2
, v
2
∈ R are the end position and velocity, t
1
, t
2
∈
R are the time durations of the corresponding sub-
segments of the trajectory and
a
i
∈ {a
min
, a
max
}, i = 1, 2, a
i
∈ R, (7)
are the optimal control inputs. a
1
= a
2
is omitted as
it is equivalent to t
1
= 0 or t
2
= 0. This omission
leaves two two combinations of possible values for
a
1
and a
2
.
Analytical solutions to the equations (6) can be
derived, revealing a total of four possible solutions.
For each combination of a
1
and a
2
values, two solu-
tions exist. The final solution is selected based on the
criteria that all unknowns must be real numbers and
that the real-world constraint of non-negative times,
t
1
≥ 0 and t
2
≥ 0, is met.
We sample a PMM trajectory generated between
the initial and goal position. The proxy reward r
P M M
is defined as
r
P M M
= k
P M M
p
∥p
t
−p
P M M
t
∥+k
P M M
v
∥v
t
−v
P M M
t
∥
(8)
where p
t
, v
t
describe the state of UAV at time t and
p
P M M
t
, v
P M M
t
are position and velocity values sam-
pled from PMM trajectory generated between the ini-
tial and goal position. k
P M M
p
, k
P M M
v
are scaling fac-
tors.
This reward incentivises the quadrotor to track the
PMM trajectory akin to a linear MPC tracking the tra-
jectory.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
286
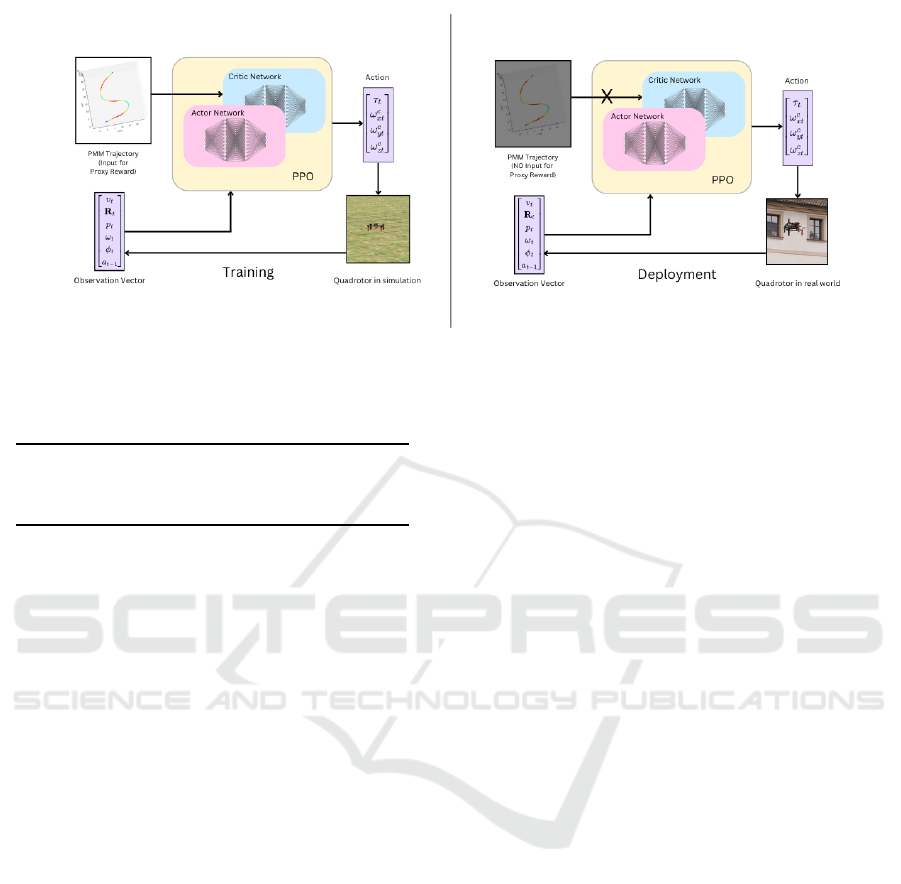
Figure 2: System Overview: We train the network with the trajectories generated through PMM planner as a proxy reward
for minimum-time state-to-state objective. The network later does not have access to these trajectories during deployment.
Table 1: Values of the rewards scaling parameters.
K
g
0.2 K
ϕ
-1.0 K
s
0.2
K
a
-0.15 K
ω
0.25 K
τ
0.4
K
c
0.35 k
P M M
p
-3.0 k
P M M
v
-0.3
4 IMPLEMENTATION DETAILS
This section details the specifications of the simula-
tion environment we used for training and evaluation,
the details of the hardware equipment used for the
real-world experiments along with the network archi-
tecture and implementation details of the proposed al-
gorithm.
4.1 Simulation Environment
We use an in-house developed simulator for training
and testing of our control policies. The inputs to our
policy are linear velocity of the quadrotor, rotation
matrix, relative position of the quadrotor to that of the
goal position, input body rates around each axis of the
quadrotor, relative heading of the quadrotor to that of
the goal, and the action executed at the previous time
step. The state of the quadrotor (position, velocity,
rotation matrix, linear and angular velocities) comes
from the simulation platform and the reference PMM
trajectories are generated at the simulated time point.
The policy outputs mass-normalized collective thrust
and the body rates. The maximum duration of each
of the simulated environments is 5s with early termi-
nation if the quadrotor goes out of the bounds of the
simulated environment. The simulation step size is
1ms and the control frequency is set to 100Hz.
We integrate the trained RL algorithm into the
multirotor Unmanned Aerial Vehicle control and es-
timation system developed by the Multi-robot Sys-
tems Group (MRS) at the Czech Technical University
(CTU) (Bá
ˇ
ca et al., 2021), (He
ˇ
rt et al., 2023). For the
simulated experiments, we use the existing multiro-
tor dynamics simulation tools available in the system
(He
ˇ
rt et al., 2023).
4.2 Hardware Specifications
We utilize a custom-built agile quadrotor with a di-
agonal motor-to-motor span of 300 mm and a total
weight of 1.2 kg. It is controlled by our open-source
MRS system architecture (He
ˇ
rt et al., 2023) operat-
ing on a Khadas Vim3 Pro single-board computer.
The quadrotor has a CubePilot Cube Orange+ flight
controller with PX4 firmware acting as the low-level
controller. It is powered by a 4S Lithium Polymer
battery. We use Holybro F9P RTK GNSS module
on the quadrotor for the state estimation. It receives
real-time corrections from a base station, which are
combined with the flight controller’s IMU to generate
odometry for the system.
4.3 Policy Training
We use Proximal Policy Optimization (PPO) algo-
rithm (Schulman et al., 2017), a first order policy gra-
dient method to train our agent. Although PPO is
popular for its simplicity in implementation, our task
is challenging due to the large dimensionality of the
search space and the complexity of learning two dis-
tinctly different behaviours. Therefore, we emphasize
important details that allowed us to achieve a policy
capable of planning and control simultaneously.
Simultaneous Learning of State-to-State Minimum-Time Planning and Control
287
4.3.1 Network Architecture
We represent the control policy with a deep neu-
ral network. We use PPO (Schulman et al., 2017)
network architecture with 2 hidden layers with 256
ReLU nodes. The learning rate is linearly decreased
starting from 5e −4 ending at 2e −5. Discount factor
γ is set to 0.99. The algorithm is set to collect 2000
experiences from each environment into the batch.
Since parallelise the training with 500 environments
the total batch size is 1 million. Such a large batch
size is needed to encapsulate the different behaviour
in a large observation space.
4.3.2 Parallelization
We trained our agent in simulation with 500 environ-
ments in parallel to increase the speed of the data col-
lection process. Additionally, we were able to lever-
age this parallelization process to diversify the data
collected by interacting with the environment. Since
training requires significantly different environment
interactions for flying in minimum-time between start
and goal and hover at a setpoint, rollouts could be per-
formed with multiple, diverse environments to learn a
generalizing policy.
4.3.3 Randomized Initialization and Dynamics
The training aims to learn simultaneously minimum-
time planning and control. To this end, we ran-
domize initial setpoint in position and heading to en-
sure exploration of necessary areas of state space.
The position is randomly sampled within the interval
[−20, 20]m and the heading is randomly sampled in
the interval [−π, π] radians.
Furthermore, to ensure robustness, for each
episode, the quadrotor’s mass and inertia are random-
ized. These are used to imitate variations caused in
the quadrotor parameters due to disturbances caused
by environmental factors such as wind. The mass and
inertia are both randomized by 30%.
4.3.4 Curriculum Strategy
Having a large(40m) sampling range, that is essen-
tial for learning state-to-state generalizing behaviour,
makes the problem incredibly challenging to learn.
Therefore, we employ a curriculum approach to
achieve the successful learning of desired objectives.
The training is divided into 4 sub-tasks. The task
difficulty increases with every stage in the curricu-
lum. In the first stage, the start position (in the be-
ginning of each episode) is sampled from the interval
of [−1, 1]m for each of X, Y, Z axes. This ensures
that the state space is small enough for successful ex-
ploration and helps the quadrotor learn the behaviour
of moving towards the goal considering PMM trajec-
tory as reference, which is given as proxy reward.
The stage is stepped up once the RSME error cal-
culated between the reached position after the rollout
and the goal gets below 2 for 100 sampled trajectories.
The position is sampled in the intervals of [−5, 5]m
,[−10, 10]m ,[−20, 20]m for all the 3 axes in the sec-
ond, third, and the fourth sub-tasks respectively. The
heading is sampled from the interval [−π, π] radians
for all the stages of the curriculum training.
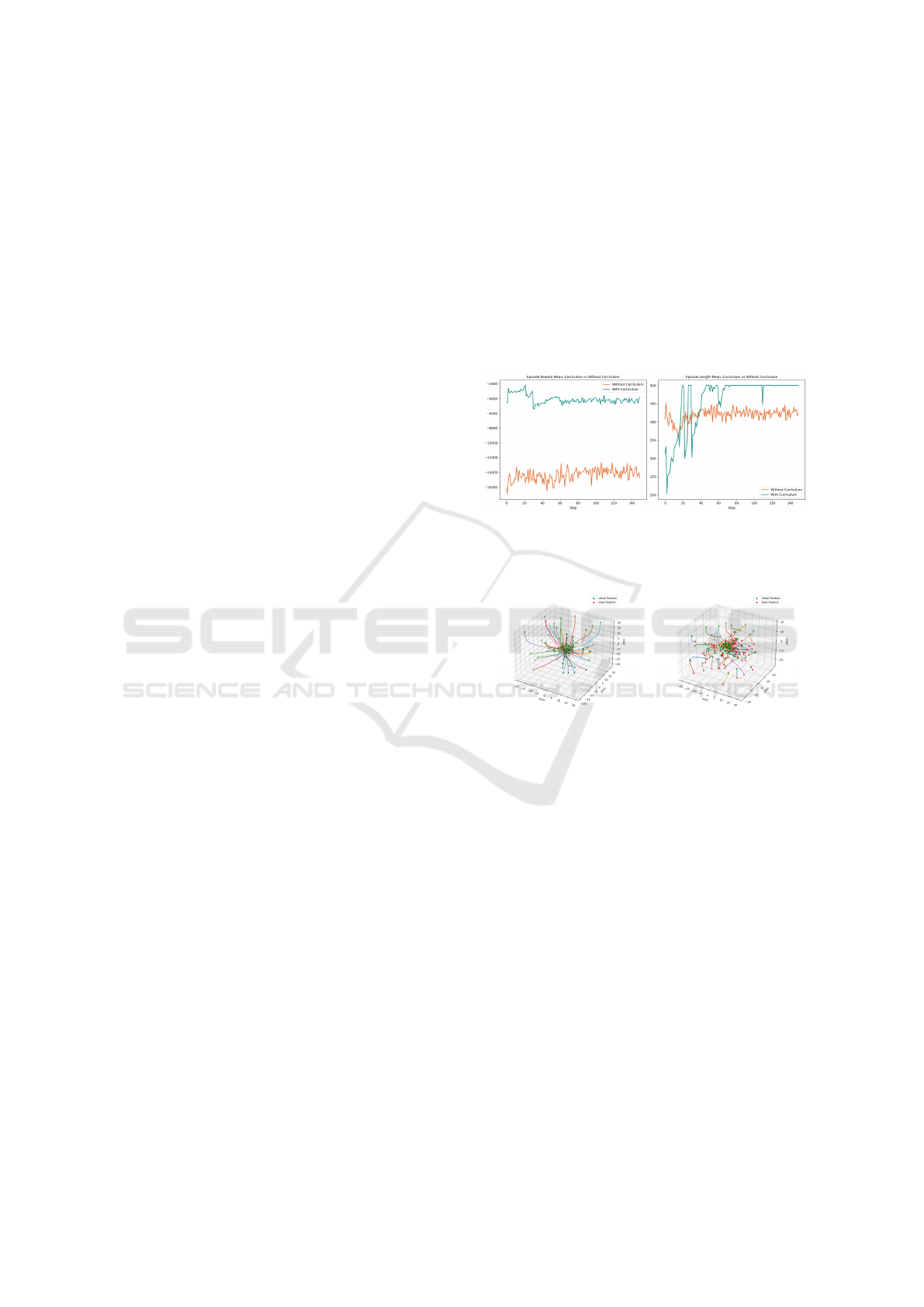
Figure 3: Comparison of mean rewards (left) and episode
lengths (right) for policies trained with curriculum (green)
and without curriculum (orange).
(a) With curriculum (b) Without curriculum
Figure 4: Visualization of typical desired quadcopter trajec-
tories in 3D space during simulated tests with curriculum
and without curriculum. We sampled 100 initial positions.
The goal conditions of all trajectories are hovering at the
origin.
5 EXPERIMENTAL RESULTS
In this section, we outline the details of the exper-
iments we conducted to validate our experiments.
We begin by establishing the importance of the cur-
riculum approach by evaluating the same objective
learned with and without curriculum. Subsequently,
we evaluate the performance of our method against a
set of baseline methods in a controlled simulation en-
vironment. Eventually, we show the deployment of
our controller on a real quadrotor (see Fig. 1) to vali-
date the robustness of our approach.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
288
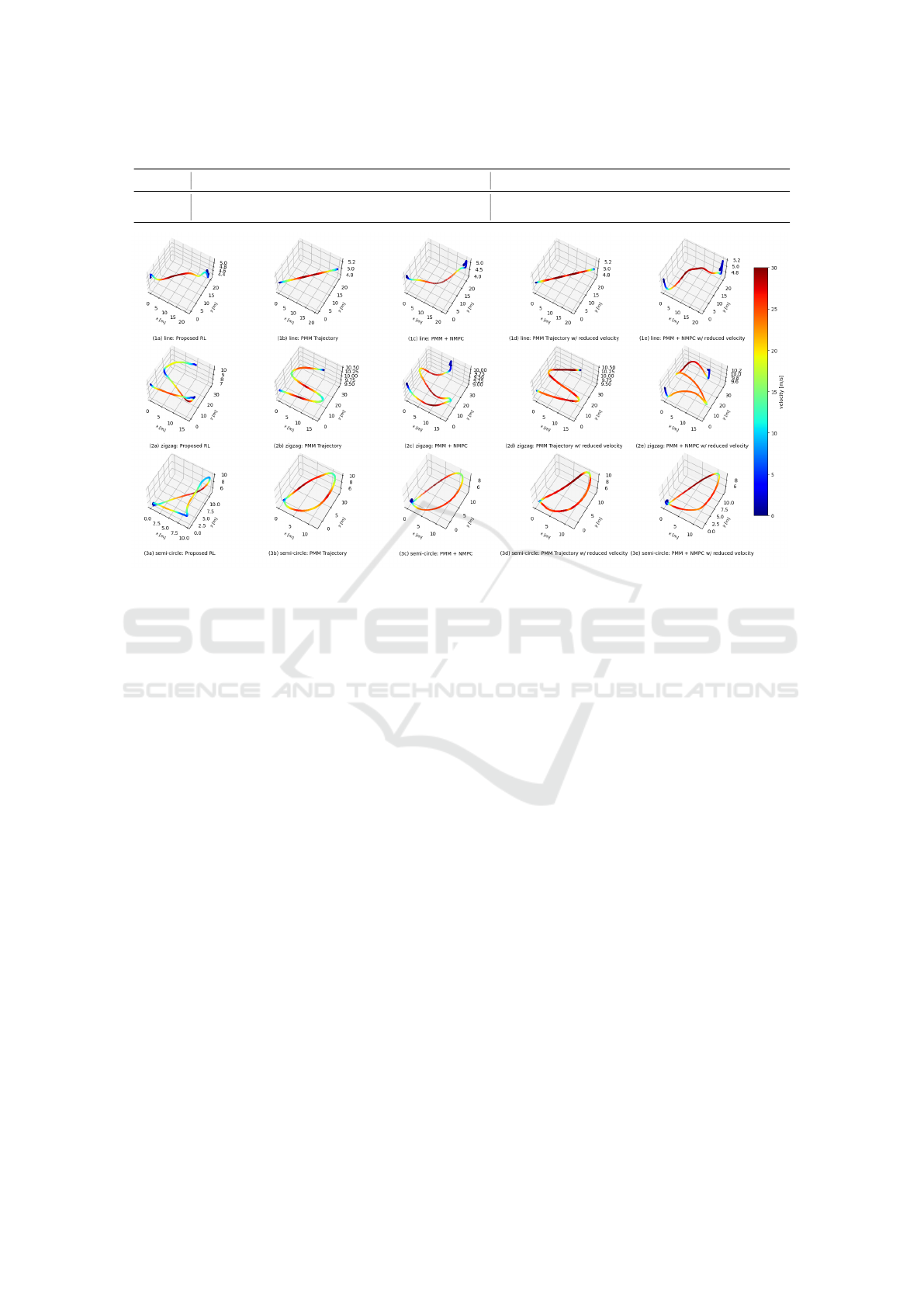
Table 2: Comparision of Flight Times and Maximum Velocity wrt baseline.
Trajectory
Flight time in seconds Maximum Velocity in m/s
Proposed RL PMM + NMPC (Foehn et al., 2021) PMM + NMPC w/ reduced velocity Proposed RL PMM + NMPC (Foehn et al., 2021) PMM + NMPC w/ reduced velocity
line 4.239 3.119 4.127 17.20 28.8 20.1
zigzag 7.924 5.092 7.503 14.5 22.6 15.9
3D semi-circle 8.169 5.614 8.202 12.8 19.0 12.5
Figure 5: Velocity Profiles of proposed RL controller along with the generated PMM trajectories and NMPC tracking perfor-
mance. The PMM trajectories with full and reduced velocities along with NMPC performance are shown.
5.1 Simulation Experiments
5.1.1 Ablation Studies
We compare the performance of the RL policy ob-
tained when the training scheme contains curriculum
and also when it is absent. To maintain consistency,
we trained both of these polices with an objective to
reach the same goal position when starting at a ran-
dom initial position obtained from sampling a space
spanning 40 x 40 x 40 m. Both the policies have ac-
cess to proxy reward in the form of PMM trajecto-
ries during training. They are trained for 3000 mil-
lion time steps with the hyperparameters detailed in
section 3.4 and scaling factors for rewards specified
in Table 1. The training scheme used is the only sole
distinction between the polices.
The results of the ablation studies are visualized
through Figures 3 and 4. The learning approach with
curriculum converges compared to training solely
with the conventional approach. It could be observed
from Fig. 3 that both the mean cumulative discounted
reward as well as the mean episode length are higher
with the use of the curriculum approach, substantiat-
ing the convergence of the proposed approach. This
is more evident from the visualizations of 100 roll-
outs with each of the approaches shown in Fig. 4. The
policy with the curriculum training paradigm success-
fully learns the objective while conventional RL fails
to do so.
5.1.2 Comparison with Baseline
We choose 3 trajectories: line, zigzag, and slanted
semicircle as shown in Fig. 5 to evaluate the perfor-
mance against the Nonlinear Model Predictive Con-
troller (NMPC) (Foehn et al., 2021) tracking the tra-
jectory generated by the PMM planner. Identical
waypoints were provided to both the PMM planner
and the proposed RL-based planner-controller. Sub-
sequently, the trajectory generated by the PMM plan-
ner—tracked by an NMPC controller—and that pro-
duced directly by the proposed RL planner-controller
are evaluated. These curves together encapsulate the
common manoeuvrers a UAV is expected to execute
in the majority of applications.
Despite providing the same velocity and acceler-
ation constraints to the PMM during training of the
proposed RL algorithm and for the NMPC controller,
we observe a significant loss in performance using the
proposed algorithm. The proposed RL algorithm has
to learn diametrically opposite behaviours of hover-
ing and agile flight over a large distance. Therefore,
the proposed RL algorithm learns to accommodate the
opposing behaviours and realize a stable behaviour
with smaller speed. To further substantiate this, we
compared the performance of the proposed RL con-
troller to NMPC tracking the PMM trajectories with
Simultaneous Learning of State-to-State Minimum-Time Planning and Control
289
reduced velocity. The velocity profiles for the trajec-
tories flown are shown in Fig. 5. When we matched
the maximum velocity of the PMM trajectory to that
of the proposed RL controller, the flight times are
comparable as seen in Table 2. It is also interesting to
note that since the proposed RL controller was trained
on state-to-state trajectories, the path it takes between
two waypoints is straighter when compared to the tra-
jectory generated by the PMM planner, as shown in
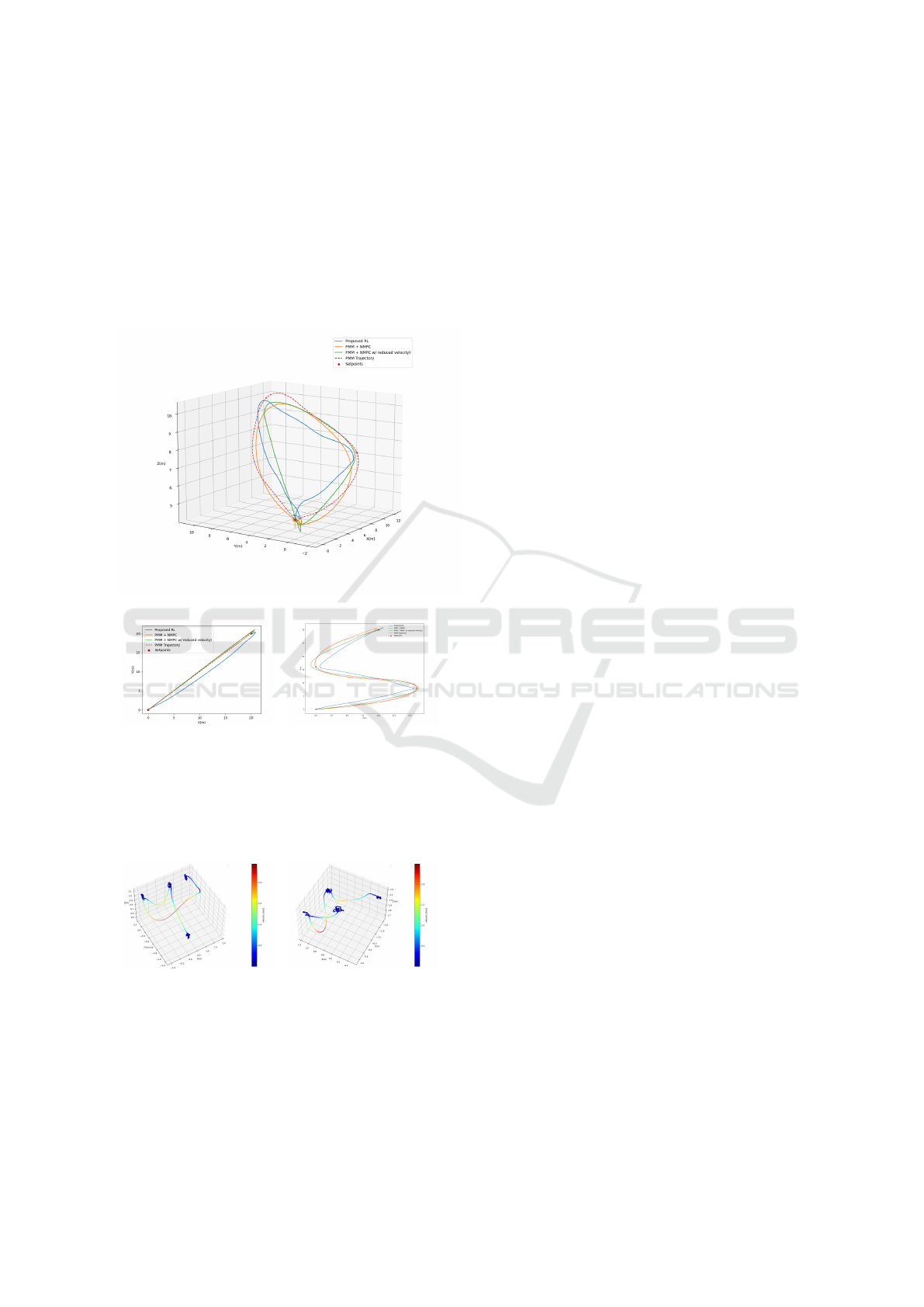
the Figures 6 and 7.
Figure 6: Comparison of path of the proposed RL algorithm
with the baseline for the waypoints of a semi-circle.
(a) line (b) zigzag
Figure 7: Comparison of path of the proposed RL algorithm
with the baseline for the waypoints of line and zigzag curve.
5.2 Real World Experiments
(a) Run 1 (b) Run 2
Figure 8: Performance of the proposed RL planner-
controller between arbitrary way points in the real world.
After verifying the proposed solution in simula-
tion, we conducted experiments in the real world. We
gave random goal waypoints to our controller to test
the robustness of the generalization of the proposed
controller. Due to constraints in space with the out-
door testing environment, we were only able to input
goal points maximally 2m far. Therefore, we were
only able to reach a maximum speed of 2.5 m/s.
Our proposed solution was able to hover stably
and reach the given way points successfully in two
different runs as shown in Fig. 8 which showcases an
ability of sim-to-real transfer. On the other hand, we
observe loss of altitude initially. We believe this is due
to the aggressive nature of the policy and mismatch in
the PID control coefficients in the lower-level control
and communication delays between the simulated en-
vironment and the real-world system. This shows the
ability of our controller to be robust against the mis-
matches, which is a consequence of artificially intro-
ducing system mismatches by randomizing the mass,
inertia and gravity coefficient during training.
6 CONCLUSION
In this work we introduced a reinforcement learning
framework that enables quadrotors to perform gen-
eralizable, minimum-time flights between any given
start and goal states. Unlike traditional methods in au-
tonomous drone racing that rely on predefined track
layouts, this approach focuses on balancing agile
flight with stable hovering. The key innovation lies in
using Point Mass Model (PMM) trajectories as proxy
rewards to approximate the optimal flight objective.
Additionally, curriculum learning is employed to en-
hance training efficiency and generalization. The pro-
posed method is validated through simulations, where
it is compared against Nonlinear Model Predictive
Control (NMPC) tracking PMM-generated trajecto-
ries. Ablation studies further highlight the benefits of
curriculum learning. Finally, real-world outdoor ex-
periments demonstrate the robustness and adaptabil-
ity of the learned policy, confirming its effectiveness
in various challenging scenarios. In the future, we
would like to conduct experiments over longer dis-
tances to better understand the potential of the ap-
proach and its full transferability to the real world.
ACKNOWLEDGMENT
The authors thank Ond
ˇ
rej Procházka for helping
with the real-world experiments. This work has
been supported by the Czech Science Foundation
(GA
ˇ
CR) under research project No. 23-06162M,
by the European Union under the project Robotics
and Advanced Industrial Production (reg. no.
CZ.02.01.01/00/22_008/0004590) and by CTU grant
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
290

no SGS23/177/OHK3/3T/13.
REFERENCES
Alotaibi, E. T., Alqefari, S. S., and Koubaa, A. (2019).
Lsar: Multi-uav collaboration for search and rescue
missions. IEEE Access, 7:55817–55832.
Bá
ˇ
ca, T., Petrlík, M., Vrba, M., Spurný, V., Pe
ˇ
ni
ˇ
cka, R.,
He
ˇ
rt, D., and Saska, M. (2021). The mrs uav system:
Pushing the frontiers of reproducible research, real-
world deployment, and education with autonomous
unmanned aerial vehicles. Journal of Intelligent &
Robotic Systems, 102(26).
Chung, H.-M., Maharjan, S., Zhang, Y., Eliassen, F., and
Strunz, K. (2021). Placement and routing optimiza-
tion for automated inspection with unmanned aerial
vehicles: A study in offshore wind farm. IEEE Trans-
actions on Industrial Informatics, 17(5):3032–3043.
Eschmann, J., Albani, D., and Loianno, G. (2024). Learn-
ing to fly in seconds. IEEE Robotics and Automation
Letters, 9(7):6336–6343.
Foehn, P., Romero, A., and Scaramuzza, D. (2021). Time-
optimal planning for quadrotor waypoint flight. Sci-
ence Robotics, 6(56):eabh1221.
He
ˇ
rt, D., Bá
ˇ
ca, T., Pet
ˇ
rá
ˇ
cek, P., Krátký, V., Pe
ˇ
ní
ˇ
cka,
R., Spurný, V., Petrlík, M., Vrba, M., Zaitlík, D.,
Stoudek, P., Walter, V., Št
ˇ
epán, P., Horyna, J., Pritzl,
V., Srámek, M., Ahmad, A., Silano, G., Licea, D. B.,
Štibinger, P., Nascimento, T., and Saska, M. (2023).
MRS Drone: A Modular Platform for Real-World De-
ployment of Aerial Multi-Robot Systems. Journal of
Intelligent & Robotic Systems, 108(64):1–34.
Hwangbo, J., Sa, I., Siegwart, R., and Hutter, M.
(2017). Control of a quadrotor with reinforcement
learning. IEEE Robotics and Automation Letters,
2(4):2096–2103.
Kaufmann, E., Bauersfeld, L., Loquercio, A., Müller, M.,
Koltun, V., and Scaramuzza, D. (2023). Champion-
level drone racing using deep reinforcement learning.
Nature, 620(7976):982–987.
Kooi, J. E. and Babuška, R. (2021). Inclined quadro-
tor landing using deep reinforcement learning. In
2021 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 2361–2368.
Polvara, R., Patacchiola, M., Sharma, S., Wan, J., Manning,
A., Sutton, R., and Cangelosi, A. (2018). Autonomous
quadrotor landing using deep reinforcement learning.
Rodriguez-Ramos, A., Sampedro, C., Bavle, H., de la
Puente, P., and Campoy, P. (2019). A deep reinforce-
ment learning strategy for uav autonomous landing on
a moving platform. Journal of Intelligent & Robotic
Systems, 93(1-2):351–366.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms.
Song, Y., Shi, K., Penicka, R., and Scaramuzza, D. (2023).
Learning perception-aware agile flight in cluttered en-
vironments. In 2023 IEEE International Conference
on Robotics and Automation (ICRA), pages 1989–
1995.
Song, Y., Steinweg, M., Kaufmann, E., and Scaramuzza, D.
(2021a). Autonomous drone racing with deep rein-
forcement learning. In 2021 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 1205–1212. IEEE.
Song, Y., Steinweg, M., Kaufmann, E., and Scaramuzza, D.
(2021b). Autonomous drone racing with deep rein-
forcement learning. In 2021 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 1205–1212.
Teissing, K., Novosad, M., Penicka, R., and Saska, M.
(2024). Real-time planning of minimum-time trajec-
tories for agile uav flight. IEEE Robotics and Automa-
tion Letters, 9(11):10351–10358.
Tsai, H.-C., Hong, Y.-W. P., and Sheu, J.-P. (2023). Com-
pletion time minimization for uav-enabled surveil-
lance over multiple restricted regions. IEEE Trans-
actions on Mobile Computing, 22(12):6907–6920.
Xing, J., Geles, I., Song, Y., Aljalbout, E., and Scara-
muzza, D. (2025). Multi-task reinforcement learning
for quadrotors. IEEE Robotics and Automation Let-
ters, 10(3):2112–2119.
Zhang, D., Loquercio, A., Tang, J., Wang, T.-H., Malik, J.,
and Mueller, M. W. (2024). A learning-based quad-
copter controller with extreme adaptation.
Zhang, D., Loquercio, A., Wu, X., Kumar, A., Malik, J., and
Mueller, M. W. (2023). Learning a single near-hover
position controller for vastly different quadcopters. In
2023 IEEE International Conference on Robotics and
Automation (ICRA), pages 1263–1269.
Simultaneous Learning of State-to-State Minimum-Time Planning and Control
291
