
Video-Based Vibration Analysis for Predictive Maintenance: A Motion
Magnification and Random Forest Approach
Walid Gomaa
1,2 a
, Abdelrahman Wael Ammar
1 b
, Ismael Abbo
1 c
, Mohamed Galal Nassef
1 d
,
Tetsuji Ogawa
3 e
and Mohab Hossam
1 f
1
Faculty of Engineering, Egypt-Japan University of Science and Technology, Alexandria, Egypt
2
Faculty of Engineering, Alexandria University, Alexandria, Egypt
3
Graduate School of Fundamental Science and Engineering, Waseda University, Tokyo, Japan
Keywords:
Condition Monitoring, Machinery, Video Motion Magnification, Machine Learning, Non-Contact Approach.
Abstract:
Condition monitoring of high-speed machinery is critical to prevent unexpected breakdowns that could lead to
injuries and cost billions. Traditional contact-based vibration sensors face limitations including measurement
perturbations, point-specific data coverage, and installation constraints. This paper presents a novel non-
contact machinery fault detection framework combining Eulerian video motion magnification with machine
learning classification. The methodology comprises two integrated components. Primarily, a video-based
vibration analysis pipeline utilizing Eulerian motion magnification with dense optical flow, which accomplish
comprehensive signal processing for feature extraction using Fast Fourier transform. Then, a Random Forest
classifier trained on video-derived temporal and frequency domain features. The system was validated based
on ground-truth data from the Gunt PT500 machinery diagnosis and the Gunt TM170 balancing apparatus
under four operational conditions: normal operation, outer ring bearing fault, and two imbalance severities
(10g and 37g). Hence, experimental results demonstrate exceptional performance with 96.7% overall accuracy
and a macro-averaged F1-score of 0.965 in discriminating fault conditions using solely video-derived features.
The video processing allowed to identify distinct vibration signatures, from imbalance conditions showing
amplitude variations to proportional fault severity ultimately offering a cost-effective solution for industrial
condition monitoring applications.
1 INTRODUCTION
Modern manufacturing depends heavily on complex
machinery, making reliable condition monitoring a
cornerstone of operational efficiency. Unplanned
equipment failures can halt production, incur safety
risks, and generate substantial costs—estimated at
$28.6 billion per year in Australia alone (Li et al.,
2025; de Koning et al., 2024). Early detection of
issues such as overheating, fluid leaks, or drive-belt
slippage is therefore critical to avert these disruptions.
A range of diagnostic techniques has emerged,
including particle debris analysis, acoustic emission
a
https://orcid.org/0000-0002-8518-8908
b
https://orcid.org/0009-0005-8695-9144
c
https://orcid.org/0009-0003-4834-8962
d
https://orcid.org/0000-0002-3192-7154
e
https://orcid.org/0000-0002-7316-2073
f
https://orcid.org/0000-0003-2075-2050
monitoring, and vibration signal inspection (Zhong
et al., 2025; Xu and Lu, 2025). Among these, vi-
bration and acoustic methods are especially attractive
because they permit online health assessment without
machine disassembly. However, these contact sensors
suffer from alignment errors and environmental noise,
which can degrade accuracy by up to 15% (Kalaiselvi
et al., 2018; Kiranyaz et al., 2024). These limitations
have spurred interest in non-contact alternatives.
Video Motion Magnification (VMM) acts like a
“motion microscope,” amplifying minute movements
in video sequences to reveal hidden dynamics (Lima
et al., 2025). Its applications span medical diag-
nostics (Nieto, 2025), structural health and condition
monitoring (Lado-Roig
´
e and P
´
erez, 2023; Yang and
Jiang, 2024; Zhang et al., 2025). Initial VMM im-
plementations relied on Lagrangian tracking which
are computationally heavy with optical-flow methods
sensitive to occlusion and complex motion (
´
Smieja
et al., 2021). Eulerian techniques then emerged, de-
Gomaa, W., Ammar, A. W., Abbo, I., Nassef, M. G., Ogawa, T. and Hossam, M.
Video-Based Vibration Analysis for Predictive Maintenance: A Motion Magnification and Random Forest Approach.
DOI: 10.5220/0013715900003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 445-452
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
445

tecting pixel-level intensity changes for faster pro-
cessing, though prone to blurring and noise artifacts
that could reduce magnification fidelity by roughly
20% (Wu et al., 2012;
´
Smieja et al., 2021). More re-
cently, data-driven models using Convolutional Neu-
ral Networks (CNNs) or Swin Transformers have
learned optimized filters, delivering sharper results
and up to 30% better noise suppression, yet often de-
pend on synthetic training sets that may not capture
real-world variability (Lado-Roig
´
e et al., 2023; Lado-
Roig
´
e and P
´
erez, 2023; Oh et al., 2018).
In this work, we build upon Eulerian VMM by
integrating enhanced optical-flow estimation and tai-
lored feature extraction to strengthen motion amplifi-
cation. Coupling these video-derived features with a
Random Forest classifier trained on ground-truth vi-
bration measurements from a rotating-machinery test
rig, we introduce a machine learning–driven, non-
contact vibration analysis framework. Our approach
aims to overcome the drawbacks of traditional contact
sensors and synthetic-data bias, offering a robust solu-
tion for continuous condition monitoring in industrial
environments.
The remaining sections are organized as follows.
We present related works in section 2, followed by
a detailed scaffold of our methodology in section 3.
Then we present, illustrate and discuss our results in
section 4. Finally, we acknowledge perspectives in
section 5.
2 RELATED WORKS
According to the review (
´
Smieja et al., 2021), VMM
techniques are commonly divided into two main cat-
egories: Eulerian and Lagrangian approaches. Par-
allel in fluid dynamics, Eulerian methods observe
changes within a stationary volume here, by decom-
posing video sequences into motion-related represen-
tations, which are then mathematically enhanced and
reconstructed into magnified output frames. On the
other hand, Lagrangian methods trace elements as
they move here, focus on tracking individual pixel or
feature trajectories across time. Hence, Eulerian ap-
proaches are particularly effective for detecting subtle
motions but can introduce blur when applied to larger
movements.
Eulerian VMM involves three stages: spatial de-
composition, motion extraction and amplification,
and noise suppression. The VMM problem can be
formulated following (Oh et al., 2018; Lado-Roig
´
e
et al., 2023): given an image signal I(x;t), where x
denotes spatial location and t time, and a displace-
ment function δ(t) representing temporal motion, the
original signal function derived from the original im-
age f (x) is expressed in Equation 1.
I(x;t) = f (x + δ(t)) I(x;0) = f (x) (1)
The goal is to synthesize a magnified version of
the signal expressed in Equation 2.
ˆ
I(x;t) = f (x + (1 + α) ·δ(t)) (2)
Here, α denotes the amplification factor. In prac-
tice, only motions within certain frequency ranges are
meaningful, and thus a temporal band-pass filter T (·),
is applied to isolate those components of δ(t).
Before learning-based advances, most VMM
methods relied on multi-frame temporal filtering to
extract and enhance relevant motion signals (Wu
et al., 2012; Wadhwa et al., 2013; Wadhwa et al.,
2014). Notably, (Wadhwa et al., 2013) proposed an
Eulerian magnification approach using local phase
variations which extracts motion through a complex
steerable pyramid and multi-scale orientation filters.
Oh et al. shifted to a CNN-driven pipeline that
learns motion features end-to-end, removing the need
for explicit temporal filtering (Oh et al., 2018). Due to
scarce real videos, they trained on synthetically gen-
erated sequences with controlled sub-pixel displace-
ments, enabling adaptive, data-driven magnification.
These allowed the application of VMM techniques
in areas such as Structural Health Monitoring (SHM)
and machinery fault diagnosis.
Hence, Yang et al. augmented phase-based
VMM (PVMM) with a gradient-domain filter
(GDGIF) (Yang and Jiang, 2024). In SHM experi-
ments against the original PVMM method (Wadhwa
et al., 2013), their approach raised the SSIM to 0.9222
and the PSNR to 35.2236dB. However, these fil-
ters require manual tuning for the relevant frequency
band, making the process laborious. To address this
drawback, the work of (Lado-Roig
´
e et al., 2023)
followed the LB-VMM framework targeting micro-
displacement bands with minimal prior information.
Under an 20% damage condition, frequency estimates
deviated only by 0.01% from accelerometer readings.
Likewise, machinery fault diagnosis has embraced
VMM. (Zhao et al., 2023) proposed a luminance-
based magnification framework to detect rotor unbal-
ance, loose bearings, and misalignment by amplifying
one to two times rotational frequencies. A rotor un-
balance appeared as axial shaking, loosened bolts as
vertical displacement, and misalignment as axial mo-
tion. Separately, a Swin Transformer–based method
used Residual Swin Transformer Blocks to enhance
magnification (Lado-Roig
´
e and P
´
erez, 2023). Though
fine-tuned on real videos and yielding a 9.63% boost
in MUSIQ (Ke et al., 2021) scores, its initial train-
ing relied on synthetic datasets like PASCAL VOC
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
446

and MS COCO (Lin et al., 2014; Everingham et al.,
2010). Similar caveats apply to LB-VMM and the
band-passed acceleration methods (Oh et al., 2018;
Lado-Roig
´
e et al., 2023; Zang et al., 2025). While
synthetic data simplifies controlled testing, it cannot
fully replicate real-world lighting, texture, and motion
artifacts.
3 METHODOLOGY
This study proposes a video-based approach for ma-
chinery fault detection and condition monitoring, con-
sisting of two main components: (1) a non-contact
video motion magnification pipeline for extracting vi-
bration signals, and (2) a Random Forest classifier us-
ing features derived from the magnified video data.
3.1 Dataset Collection
All extracted features are derived from the working
conditions of two rotating machines. The first is the
Machinery Diagnosis System, Gunt PT500, which
supports vibration measurement and field balancing
tasks (Song et al., 2025; Gunt, 2025a). Three oper-
ating conditions were tested: a normal condition with
healthy components and no added mass, a faulty con-
dition with outer ring bearing damage, and a weighted
condition where a 10g mass was added at a 90
◦
angle
on the flywheel, as shown in Figure 1a.
The second setup is the Balancing Apparatus Gunt
TM170, used to illustrate imbalance scenarios (Gunt,
2025b). It includes weighted condition where 37g is
placed across different slots on the balancing founda-
tion (Figure 1b). These configurations serve as the
basis for video collection and subsequent feature ex-
traction through motion magnification.
3.2 Our Proposed Framework
The overall methodology, as depicted in Figure 2 is
structured as an integrated pipeline comprising se-
quential processing stages that work in tandem.
3.2.1 Motion Magnification
The primary component of our methodology intro-
duces an approach to vibration monitoring that elim-
inates the need for physical sensor contact with ma-
chinery. Here, the computer vision-based system
leverages Eulerian Motion Magnification as the cor-
nerstone step, combined with dense optical flow ex-
traction to capture vibration signatures directly from
video recordings.
The process begins with an interactive region of
interest (ROI) selection corresponding to the vibrating
machine parts. The mathematical representation of
ROI is defined in Equation 3.
I
ROI
(x,y,t) = I(x
0
+ x,y
0
+ y,t) (3)
Where (x
0
,y
0
) represents the top-left corner of the
selected ROI, and (x, y) are the relative coordinates
within the cropped region of the initial frames from
Equation 1.
Given an input video sequence I(x,t) as presented
in Equation 1, the Eulerian magnification process is
applied on a region of interest (ROI) of the frames
to obtain an output similar to Equation 2. Then, the
dense optical flow computation quantifies pixel-wise
motion vectors between consecutive frames within
the ROI as temporal displacement fields vibration pat-
terns. The motion magnitude is computed as the Eu-
clidean norm of the flow vectors, and the spatial aver-
aging across the ROI produces the final motion time-
series as presented in Equation 4.
S(t) =
1
|ROI|
∑
(x,y)∈ROI
q
u(x,y,t)
2
+ v(x,y,t)
2
(4)
Where u, v are the optical flow vectors, and x, y
are the relative spatial coordinates.
3.2.2 Feature Extraction
The extracted motion timeseries undergoes process-
ing to generate discriminative features for fault clas-
sification. The preprocessing pipeline includes DC
component removal by subtracting the signal mean to
eliminate any constant offset as developed in Equa-
tion 5.
x
i
= S(t
i
) −
1
N
N
∑
j=1
S(t
j
) (5)
With S(t
i
) representing the raw motion timeseries
samples from Equation 4, x
i
are the DC-removed sig-
nal samples, N is the total number of samples. Sta-
tistical measures are computed from the DC-removed
motion signal to capture the temporal characteristics
of each working condition. Particularly, the key time
domain features include the mean, variance, skewness
and zero-crossing rate.
As each operating condition is characterized by
distinct vibrational signatures, this pipeline aims to
generate comprehensive datasets for each working
condition of the captured scene.
3.2.3 Frequency Analysis
Comprehensive frequency domain analysis is per-
formed using Fast Fourier Transform (FFT) to iden-
tify dominant vibrational frequencies and extract
Video-Based Vibration Analysis for Predictive Maintenance: A Motion Magnification and Random Forest Approach
447
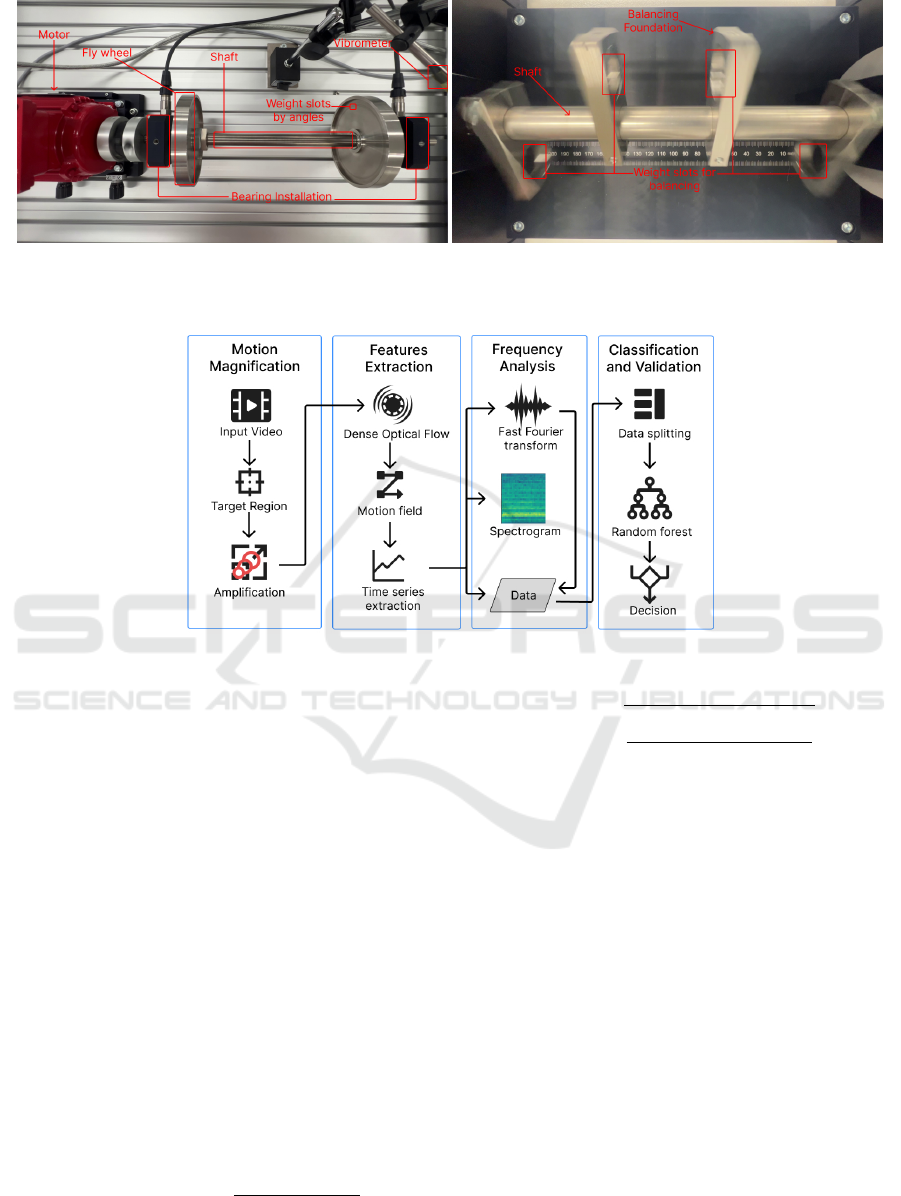
(a) Machinery diagnosis Gunt PT500 setup. (b) Balancing apparatus Gunt TM170 setup.
Figure 1: Setups for machinery diagnosis and balancing apparatus.
Figure 2: Video-based vibration analysis framework.
spectral characteristics relevant to the condition mon-
itored. The FFT computation transforms the dis-
crete time-domain signal to frequency domain, with
an implementation of the Discrete Fourier Transform
(DFT).
From the frequency spectrum, multiple discrim-
inative features are extracted for analysis. These
include the total spectral energy (Equation 6), the
maximum amplitude and its corresponding frequency
(Equations 7 and 8), the spectral centroid (Equa-
tion 9), spectral bandwidth (Equation 10), and the
spectral entropy (Equation 11).
Total Energy =
N/2−1
∑
k=0
A(k)
2
(6)
Max Amplitude = max
k
A(k) (7)
HF = f
k
, where k = argmax
j
A( j) (8)
Spectral Centroid =
∑
N/2−1
k=0
f
k
· A(k)
∑
N/2−1
k=0
A(k)
(9)
SB =
v
u
u
t
∑
N/2−1
k=0
( f
k
− f
c
)
2
· A(k)
∑
N/2−1
k=0
A(k)
(10)
Spectral Entropy = −
N/2−1
∑
k=0
P
k
log
2
(P
k
) (11)
Here, A(k) represents the normalized amplitude at
frequency bin k, f
k
is the corresponding frequency, f
c
is the spectral centroid, and P
k
= A(k)/
∑
N/2−1
j=0
A( j)
is the normalized probability density for entropy cal-
culation.
3.2.4 Classification and Validation
The final component of our framework applies Ran-
dom Forest-based machine learning classification to
the comprehensive features extracted from the video-
based vibration analysis. Here, an important step in-
volves a preprocessing pipeline to ensure data quality
through systematic process such as: data structuring
and, 80-20 train-test split using stratified sampling.
Furthermore, the performance evaluation encom-
passes multiple metrics for comprehensive assess-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
448

ment including the accuracy, and the F1-score com-
puted based on obtained true positives, true negatives,
false positives, and false negatives predictions.
In the following section, we will present the re-
sults of our framework in ground truth test rigs.
4 RESULTS AND DISCUSSION
In this section, we present the configuration in which
we captured the machinery scene and the empirical
results we obtained from our proposed framework de-
picted in Figure 2.
4.1 Experimental Setup
The baseline established in subsection 3.1, we
recorded a set of 1 minute videos of both the Gunt
PT500 and Gunt TM170 (Figure 1) at 4K@60FPS
resolution for each of their operating conditions run-
ning at 250RPM. More precisely, for the Gunt PT500,
the camera has been installed from above at 50cm
height of the base plate supporting the machine; and
from the front at 91.5cm away and elevated at 120cm
height. Regarding the Gunt TM170, we recorded
from the front view at 11cm away with 12cm height
then 16cm away with 20cm height.
Furthermore, we fed the captured scenes into our
proposed framework which runs on a Linux distribu-
tion in a DELL Intel Core i5-2410M 2.3GHz 8GB
RAM to extract and process the features relevant for
frequency analysis.
4.2 Dataset Description
The dataset extraction of our proposed framework
maximizes data utilization and create sufficient train-
ing samples using a sliding window approach imple-
mented for temporal segmentation. More particularly,
each video is systematically divided into overlapping
clips of 20s with a 5s overlap interval. Thus, this
segmentation strategy produces nine clips per initial
video, where the first clip encompasses the range 0
to 20s, the second one covers 5s to 25s, and so on.
We obtained a set of 272 compiled clips for each of
the operational condition. Hence, this overlapping
segmentation approach served multiple purposes: it
increased the available training data from the limited
original recordings, with temporal continuity between
adjacent clips, and ensured that transient vibrational
events were captured in multiple segments.
4.3 Vibration Signal Analysis
The video processing pipeline successfully extracted
meaningful vibration signatures for each of the four
monitored test conditions: normal operation, 10g im-
balance, 37g imbalance, and outer ring bearing fault.
The extracted time-domain signals reveal clear,
condition-dependent signatures. In the healthy
state (Fig. 3a), oscillation amplitudes remain within
±0.002, reflecting a stable baseline with only spo-
radic spikes. Introducing a 10g imbalance (Fig. 3b)
elevates peak excursions to nearly ±0.4, indicating
emergent impulsive events and increased variabil-
ity. Under 37g loading (Fig. 3c), the system ex-
hibits the most severe response, with swings up to
±5 and sustained high-magnitude bursts, underscor-
ing the method’s sensitivity to imbalance severity.
The outer-ring fault (Fig. 3d) produces moderate am-
plitudes (≈ ±0.7) but with pronounced periodic im-
pacts characteristic of bearing defects, distinguishing
it from pure imbalance cases. Together, these patterns
confirm that our pipeline reliably captures both subtle
and extreme vibration behaviors directly from video
data.
The FFT results further validate condition sep-
arability. The normal spectrum (Fig. 4a) shows
low-level peaks near 8Hz, 23.5Hz, and 27Hz (am-
plitudes ≈ 2.5 × 10
−5
), representing nominal rota-
tional harmonics. With a 10g mass (Fig. 4b), energy
concentrates between 20–30Hz, peaking at 28–29Hz
(≈ 0.012), signaling elevated high-frequency con-
tent due to imbalance. The 37g case (Fig. 4c) dis-
plays a broader spectral footprint, with significant
components at 3Hz, 19Hz, and 20Hz (0.1–0.12),
reflecting combined low- and high-frequency exci-
tation. Faulted bearing (Fig. 4d) presents distinct
peaks at 21Hz, 27Hz, and 28.5Hz (0.017–0.018),
yielding a spectral profile that diverges from both
healthy and imbalance conditions. The four-order-
of-magnitude span in amplitude (2.5 × 10
−5
–0.12)
demonstrates that video-derived spectra quantita-
tively capture condition-specific dynamics suitable
for reliable classification.
Spectrograms analysis add temporal resolution to
these findings. Healthy state (Fig. 5) maintain uni-
form energy across the band at –40 to –20dB. The 10g
imbalance (Fig. 6) shows band-limited energy surges
of ≈ –60dB at rotational harmonics, while the 37g
condition (Fig. 7) exhibits stronger bursts between
10–20Hz, particularly at 7–15s approaching –20dB.
The bearing fault (Fig. 8) is marked by a high-energy
event at 6–8s spanning 15–25Hz greater than –60dB,
a different signature from imbalance cases.
Collectively, analysis of 272 video clips yielded
Video-Based Vibration Analysis for Predictive Maintenance: A Motion Magnification and Random Forest Approach
449
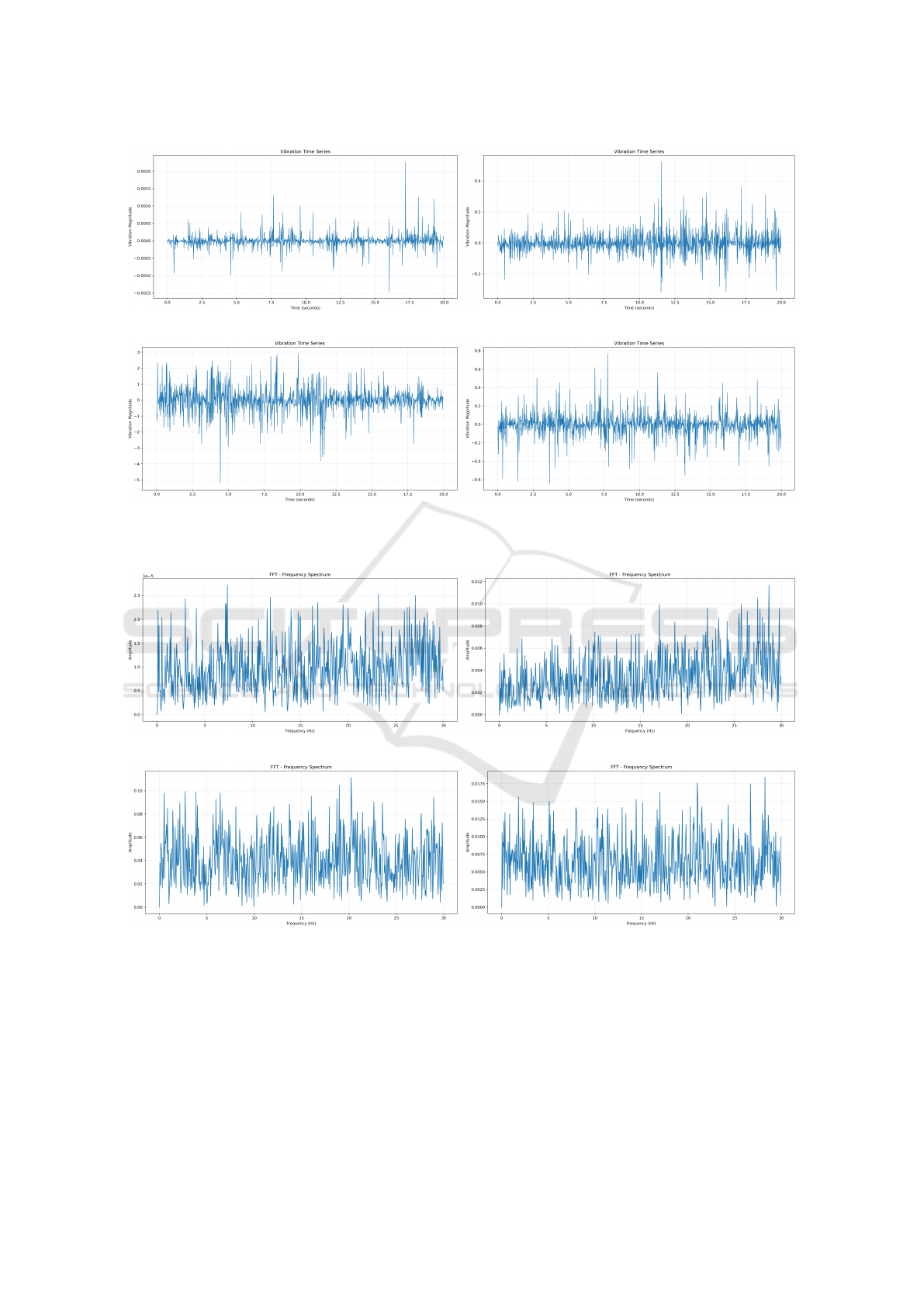
(a) Normal operation. (b) 10g imbalance.
(c) 37g imbalance. (d) Faulty bearing.
Figure 3: Time-domain vibration signals extracted from video recordings under different conditions.
(a) Normal operation. (b) 10g imbalance.
(c) 37g imbalance. (d) Outer ring fault.
Figure 4: Frequency spectra from FFT analysis of vibration signals under different conditions.
14 discriminative frequency features. Their consis-
tency across time, frequency, and time–frequency do-
mains underpins the subsequent Random Forest clas-
sifier’s strong performance.
4.4 Classification Performance
The Random Forest classifier demonstrated excellent
performance in distinguishing between the four ma-
chinery conditions using the video-derived features.
We configured its parameters with 200 estimators at a
maximum depth of 10. To ensure robust model eval-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
450
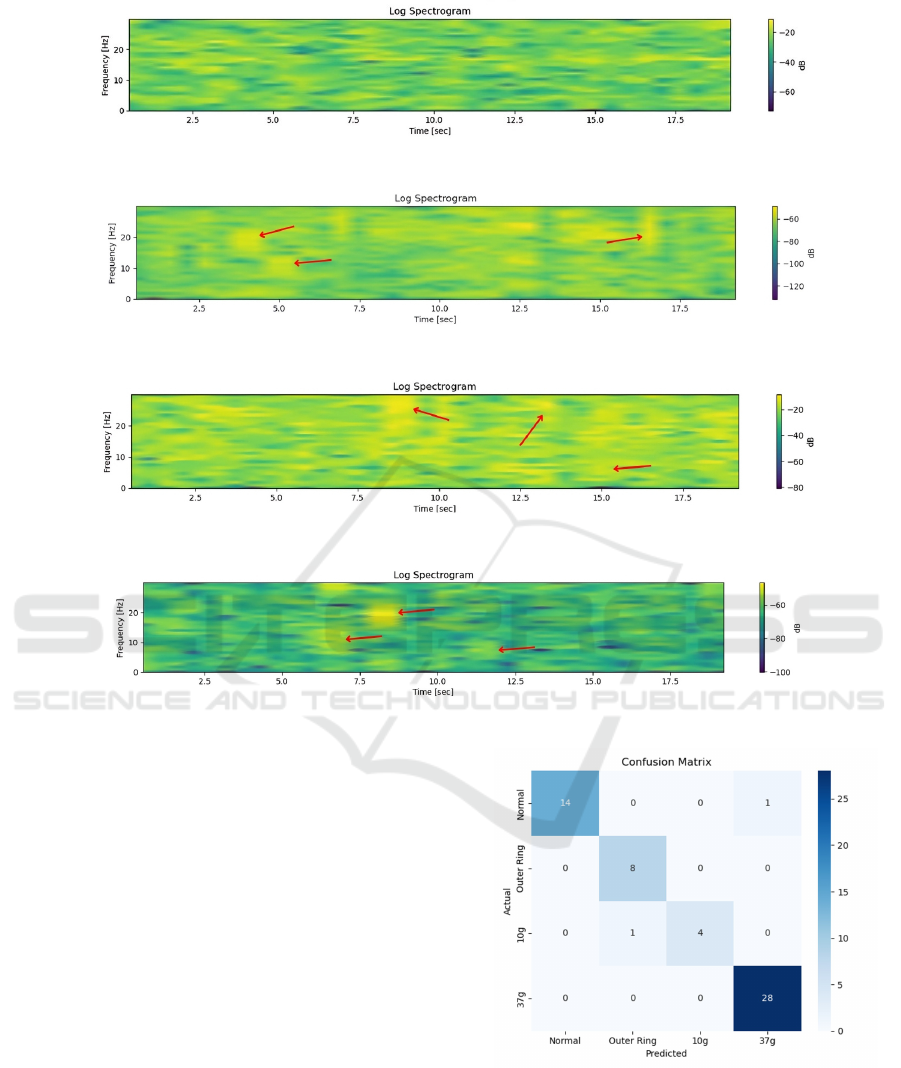
Figure 5: Spectrogram analysis under normal operating condition.
Figure 6: Spectrogram analysis for 10g imbalance showing time-varying frequency patterns.
Figure 7: Spectrogram analysis for 37g imbalance with time-varying frequency patterns.
Figure 8: Spectrogram analysis for faulty condition showing time-varying frequency patterns.
uation, the dataset was partitioned using an 80 − 20
split, allocating 80% of the clips (218 clips) for train-
ing purposes and reserving the remaining 20% (54
clips) for testing. Hence, the model achieved an over-
all accuracy of 96.7% on the test set, demonstrating
robust fault detection capabilities using solely video-
derived vibration features.
Moreover, the macro-averaged F1-score of 0.965
indicates balanced performance across all fault cate-
gories. Figure 9 presents the resulting confusion ma-
trix, where each cell represents the number of classi-
fied video clips from the 54 clips test set, revealing
detailed classification patterns and potential areas for
improvement.
5 CONCLUSIONS
This work confirms that video-based motion mag-
nification can serve as a reliable, non-contact ap-
proach for machinery fault diagnosis. We introduced
Figure 9: Classification performance of all conditions.
a feature extraction pipeline capturing both tempo-
ral and frequency characteristics of vibrations di-
rectly from video frames, and validated it, based on
ground-truth measurements of rotating equipment un-
like prior synthetic-data studies.
Experimental tests on the Gunt PT500 and TM170
Video-Based Vibration Analysis for Predictive Maintenance: A Motion Magnification and Random Forest Approach
451

under four operating conditions demonstrated that
the extracted features effectively discriminate normal,
faulty, and imbalance states. A Random Forest clas-
sifier trained on these features achieved 96.7% accu-
racy and a macro-averaged F1-score of 0.965, under-
scoring the method’s robustness. Nevertheless, future
work will extend this framework to diverse machin-
ery types and fault scenarios, and explore real-time
processing for continuous industrial monitoring.
ACKNOWLEDGEMENTS
This work is funded by the Japan International Coop-
eration Agency (JICA) Program, Egypt – Grant Num-
ber (TB1-25-4: ”Contactless Predictive Maintenance
for Rotating Equipment: An AI and Vision-Based
Approach”).
REFERENCES
de Koning, M., Machado, T., Ahonen, A., Strokina, N., Di-
anatfar, M., De Rosa, F., Minav, T., and Ghabcheloo,
R. (2024). A comprehensive approach to safety for
highly automated off-road machinery under regulation
2023/1230. Safety Science, 175:106517.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88:303–338.
Gunt (2025a). Pt 500 machinery diagnostic system, base
unit.
Gunt (2025b). Tm 170 balancing apparatus.
Kalaiselvi, S., Sujatha, L., and Sundar, R. (2018). Fabri-
cation of mems accelerometer for vibration sensing in
gas turbine. In 2018 IEEE SENSORS, pages 1–4.
Ke, J., Wang, Q., Wang, Y., Milanfar, P., and Yang, F.
(2021). Musiq: Multi-scale image quality transformer.
In Proceedings of the IEEE/CVF international confer-
ence on computer vision, pages 5148–5157.
Kiranyaz, S., Devecioglu, O. C., Alhams, A., Sassi, S.,
Ince, T., Avci, O., and Gabbouj, M. (2024). Exploring
sound vs vibration for robust fault detection on rotat-
ing machinery. IEEE Sensors Journal.
Lado-Roig
´
e, R., Font-Mor
´
e, J., and P
´
erez, M. A. (2023).
Learning-based video motion magnification approach
for vibration-based damage detection. Measurement:
Journal of the International Measurement Confedera-
tion, 206.
Lado-Roig
´
e, R. and P
´
erez, M. A. (2023). Stb-vmm:
Swin transformer based video motion magnification.
Knowledge-Based Systems, 269:110493.
Li, H., Sun, Y., Adumene, S., Goleiji, E., and Yazdi,
M. (2025). Machinery safety improvement in
manufacturing-oriented facilities: a strategic frame-
work. The International Journal of Advanced Man-
ufacturing Technology, pages 1–30.
Lima, J. A., Miosso, C. J., and Farias, M. C. (2025). Syn-
flowmap: A synchronized optical flow remapping for
video motion magnification. Signal Processing: Im-
age Communication, 130:117203.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter vision–ECCV 2014: 13th European conference,
zurich, Switzerland, September 6-12, 2014, proceed-
ings, part v 13, pages 740–755. Springer.
Nieto, J. J. (2025). Digital twins, history, metrics and future
directions. Mechatronics Technology, 2(1).
Oh, T.-H., Jaroensri, R., Kim, C., Elgharib, M., Durand, F.,
Freeman, W. T., and Matusik, W. (2018). Learning-
based video motion magnification. In Proceedings of
the European conference on computer vision (ECCV),
pages 633–648.
Song, Y., Zhuang, Y., Wang, D., Li, Y., and Zhang, Y.
(2025). Fault diagnosis in rolling bearings using
multi-gaussian attention and covariance loss for single
domain generalization. IEEE Transactions on Instru-
mentation and Measurement.
Wadhwa, N., Rubinstein, M., Durand, F., and Freeman,
W. T. (2013). Phase-based video motion processing.
ACM Transactions on Graphics (ToG), 32(4):1–10.
Wadhwa, N., Rubinstein, M., Durand, F., and Freeman,
W. T. (2014). Riesz pyramids for fast phase-based
video magnification. In 2014 IEEE International
Conference on Computational Photography (ICCP),
pages 1–10. IEEE.
Wu, H.-Y., Rubinstein, M., Shih, E., Guttag, J., Durand, F.,
and Freeman, W. (2012). Eulerian video magnifica-
tion for revealing subtle changes in the world. ACM
transactions on graphics (TOG), 31(4):1–8.
Xu, X. and Lu, Y. (2025). Acoustic modal analysis method
for helicopter acoustic scattering. AIAA Journal,
pages 1–21.
Yang, Y. and Jiang, Q. (2024). A novel phase-based video
motion magnification method for non-contact mea-
surement of micro-amplitude vibration. Mechanical
Systems and Signal Processing, 215.
Zang, Z., Yang, X., Zhang, G., Li, S., and Chen, J. (2025).
Video-based subtle vibration measurement in the pres-
ence of large motions. Measurement, 240:115559.
Zhang, G., Hou, J., Wan, C., Li, J., Xie, L., and Xue,
S. (2025). Non-contact vision-based response recon-
struction and reinforcement learning guided evolu-
tionary algorithm for substructural condition assess-
ment. Mechanical Systems and Signal Processing,
224:112017.
Zhao, H., Zhang, X., Jiang, D., and Gu, J. (2023). Research
on rotating machinery fault diagnosis based on an im-
proved eulerian video motion magnification. Sensors
2023, Vol. 23, Page 9582, 23:9582.
Zhong, S., Jin, G., Chen, Y., Ye, T., and Zhou, T. (2025).
Review of vibration analysis and structural optimiza-
tion research for rotating blades. Journal of Marine
Science and Application, 24(1):120–136.
´
Smieja, M., Mamala, J., Pra
˙
znowski, K., Ciepli
´
nski, T.,
and Łukasz Szumilas (2021). Motion magnification
of vibration image in estimation of technical object
condition-review. Sensors, 21.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
452
