
Predicting Contact Surfaces in Repetitive Robotic Tasks
Luis Hern
´
an Campos
1
, Jos
´
e Luis Reyes Ramos
1
, Marcelo Fajardo-Pruna
1 a
,
Christian Tutiv
´
en
1 b
and Carlos Saldarriaga
1,2 c
1
Facultad de Ingenier
´
ıa en Mec
´
anica y Ciencias de la Producci
´
on, Escuela Superior Polit
´
ecnica del Litoral, ESPOL,
Guayaquil, Ecuador
2
Centre de Disseny d’Equips Industrials (CDEI), Universitat Polit
`
ecnica de Catalunya, Barcelona, Spain
Keywords:
Robotics, Control, Machine Learning, CatboostClassifier, Industrial Robot, Estimation of Parameters.
Abstract:
Modern industrial robotics increasingly demands adaptive interaction with diverse materials in repetitive tasks,
where traditional model-based control struggles to accommodate surface variability. This study introduces a
novel framework that integrates impedance control with a machine learning-based surface classification sys-
tem to enhance robotic adaptability in contact-rich environments. Using a 7-DOF Franka Emika Panda ma-
nipulator, we simulated repetitive trajectories over six material types and collected comprehensive dynamic
interaction data. A CatBoostClassifier was trained on this dataset to predict surface type based on features
such as joint torques, contact forces, and end-effector kinematics. The classifier achieved an overall accuracy
of 99%, with F1-scores exceeding 0.98 across all classes, demonstrating robust discrimination, even between
materials with similar frictional properties like brass and Teflon. Results show that our approach reduces man-
ual tuning effort and maintains stable impedance responses under perturbations up to 50 N. This fusion of
data-driven inference and classical control lays the groundwork for real-time parameter adaptation in robotic
systems, offering new pathways toward safer, more efficient operation in unstructured industrial settings. Fu-
ture work will expand the framework with multimodal sensing and evaluate its generalization on novel surfaces
in physical deployments.
1 INTRODUCTION
Industrial robotics has revolutionized manufacturing
by enabling precise, repetitive tasks with unmatched
efficiency (Kulkarni et al., 2024). However, as indus-
tries shift toward customized production and dynamic
environments, robots must now adapt to unstructured
interactions—particularly when contacting surfaces
with varying material properties (Rezaie and Haeri,
2011). While impedance control related frameworks
(e.g., mass-spring-damper models) provide founda-
tional adaptability (Hu et al., 2020), they often rely
on manually tuned parameters, limiting responsive-
ness to real-time surface variations. This work ad-
dresses that gap by developing a machine learning-
based surface prediction system (CatBoostClassifier)
for a 7-DOF Franka Panda robot, aiming to automat-
ically classify materials (e.g., brass vs. Teflon) and
optimize contact parameters, thereby reducing con-
a
https://orcid.org/0000-0002-5348-4032
b
https://orcid.org/0000-0001-6322-4608
c
https://orcid.org/0000-0001-9014-681X
trol effort and improving task autonomy (Paz et al.,
2022).
This adaptability challenge becomes critical when
handling materials with similar frictional properties
but different compliance characteristics, such as brass
and Teflon.
While traditional impedance control methods (Hu
et al., 2020) can maintain stability during contact,
their fixed parameters often lead to either excessive
contact forces (risking damage) or insufficient inter-
action (compromising task completion) when surface
properties deviate from expected values. Recent work
in variable impedance control (Chen et al., 2024) has
demonstrated improvements, but still requires manual
tuning for each circumstance or material class - a pro-
cess that becomes impractical in dynamic industrial
settings where objects may vary significantly within a
single task cycle.
To address these limitations, we propose a data-
driven approach that leverages machine learning to
automatically predict surface properties and optimize
impedance parameters in real-time. Building on re-
Campos, L. H., Reyes Ramos, J. L., Fajardo-Pruna, M., Tutivén, C. and Saldarriaga, C.
Predicting Contact Surfaces in Repetitive Robotic Tasks.
DOI: 10.5220/0013714400003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 275-282
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
275

cent advances in robotic tactile perception (Ba et al.,
2018), our method utilizes the CatBoostClassifier to
analyze interaction forces and motion patterns during
contact tasks. This contrasts with traditional model-
based approaches that require explicit physical mod-
eling of each surface type, which becomes imprac-
tical when dealing with unknown or variable materi-
als (Suomalainen et al., 2022; Elguea-Aguinaco et al.,
2023). By training on comprehensive simulation data
from a 7-DOF Franka Panda robot executing repeti-
tive contact motions, our system learns to distinguish
subtle differences in dynamic behavior across mate-
rials - a capability particularly valuable for industrial
applications like precision assembly or recycling au-
tomation, among others (Paz et al., 2022).
Our validation focused on precisely those chal-
lenging scenarios where traditional methods falter –
particularly in distinguishing material pairs with sim-
ilar frictional coefficients but different compliance
profiles (e.g., brass vs. Teflon, rubber vs. silicone).
We propose analysis of temporal patterns in joint
torques and end-effector vibrations during continu-
ous operation tests looking to obtain a significant im-
provement over model-based approaches that showed
23% higher error rates under identical conditions (Ba
et al., 2018). This performance gap highlights the
advantage of data-driven parameter estimation in dy-
namic industrial environments where surface proper-
ties may vary unpredictably (Kroemer et al., 2021).
Despite these advancements, three limitations
warrant consideration. First, while our proposed clas-
sifier excels on known materials (e.g., metals, poly-
mers), as it will be shown, its accuracy drops by 12-
15% for unseen surface textures – a challenge also ob-
served in (Ba et al., 2018)’s work. Second, the current
implementation requires 3-5 contact cycles to stabi-
lize predictions, limiting applicability in time-critical
tasks. Finally, friction variability due to environmen-
tal factors (i.e., temperature, wear) was not fully mod-
eled in our simulations. These open challenges will
guide our future work toward embedding real-time
surface adaptation in physical robotic cells.
This work demonstrates that machine learning-
enhanced impedance control can effectively bridge
the gap between theoretical modeling and real-world
surface variability in industrial robotics. By com-
bining the CatBoost Classifier’s high-accuracy ma-
terial prediction (99% on known surfaces) with
theoretically-sound parameter tuning, we address a
critical limitation in traditional approaches. Although
current limitations in generalization to novel textures
persist, our framework provides a foundation for en-
abling safer human-robot collaboration through more
responsive contact behavior (Paz et al., 2022). Future
work will focus on real-world validation with multi-
modal sensing (vision, force) to overcome the texture-
dependency challenge identified in Section IV.
2 METHODOLOGY
This Section details the modeling, simulation, data
acquisition, and machine learning methods used to
develop a predictive contact-surface classification
system for industrial robotic tasks. The study was
based on the development of a predictive system for
the estimation of contact surfaces in repetitive tasks.
First, a simulation analysis of the robotic system
was performed, implementing an impedance control
system with the objective of improving the interac-
tion of the robot with different surfaces, in this case
straight surfaces. Impedance control has been widely
applied as a sound and safe solution for robotic tasks
in which the robot interacts with the environment.
It basically refers to the extension and generaliza-
tion of the second-order scalar mechanical system
m ¨x +c ˙x +kx = f , consisting of a mass, a damper, and
a spring with an external force, respectively (Villani
and De Schutter, 2008).
Starting from the dynamic equation of motion of
a robotic manipulator, a definition for joint space
impedance control can be imposed and described
M(q)
¨
q(t) + C
˙
q(t) + Kq(t) = τ
τ
τ
ext
(1)
where q is the vector of the n joint angles, M is the
(n × n) inertia mass matrix, and the damping (C) and
stiffness (K) matrices are all expressed in the joint
space of the robot.
All the modeling and simulation of the robot was
performed using MATLAB/Simulink (MathWorks,
2022), allowing us a deep understanding and analy-
sis of the robot behavior and response of the over-
all system. Since an impedance controller defined in
the Cartesian space was implemented, the control pa-
rameters needed to be chosen in a safe manner, al-
ways having in mind the stability and joint behav-
ior for the entire manipulation task. After perform-
ing the corresponding joint-based analysis (Campos
et al., 2024) and several tests (without any inertia
reshaping), we chose to use the following parame-
ters (Cartesian D
C
damping, and K
C
stiffness matri-
ces) according to the joint configuration of the robot,
all in SI units: D
C
= diag(100, 100, 100, 18, 13, 15),
K
C
= diag(3500, 3500, 3500, 100, 100, 100).
These parameters were validated in the simulator
with the robot and proved to perform correctly for the
given trajectories.
Subsequently, tests were performed under differ-
ent operating conditions, i.e., each trajectory was
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
276
evaluated on different materials such as: Steel, Alu-
minum, Copper, Ice, Brass, and Teflon, in order to
observe how the joints act and the effect generated in
the torque and force, both in situations where there
are no external forces and in situations where external
forces act on the end effector, representing undesired
external perturbations or errors.
The selected surfaces represent a spectrum of in-
dustrially relevant materials with varying stiffness,
damping, and friction characteristics, ranging from
hard metals (steel, copper) to soft, low-friction poly-
mers (Teflon, ice).
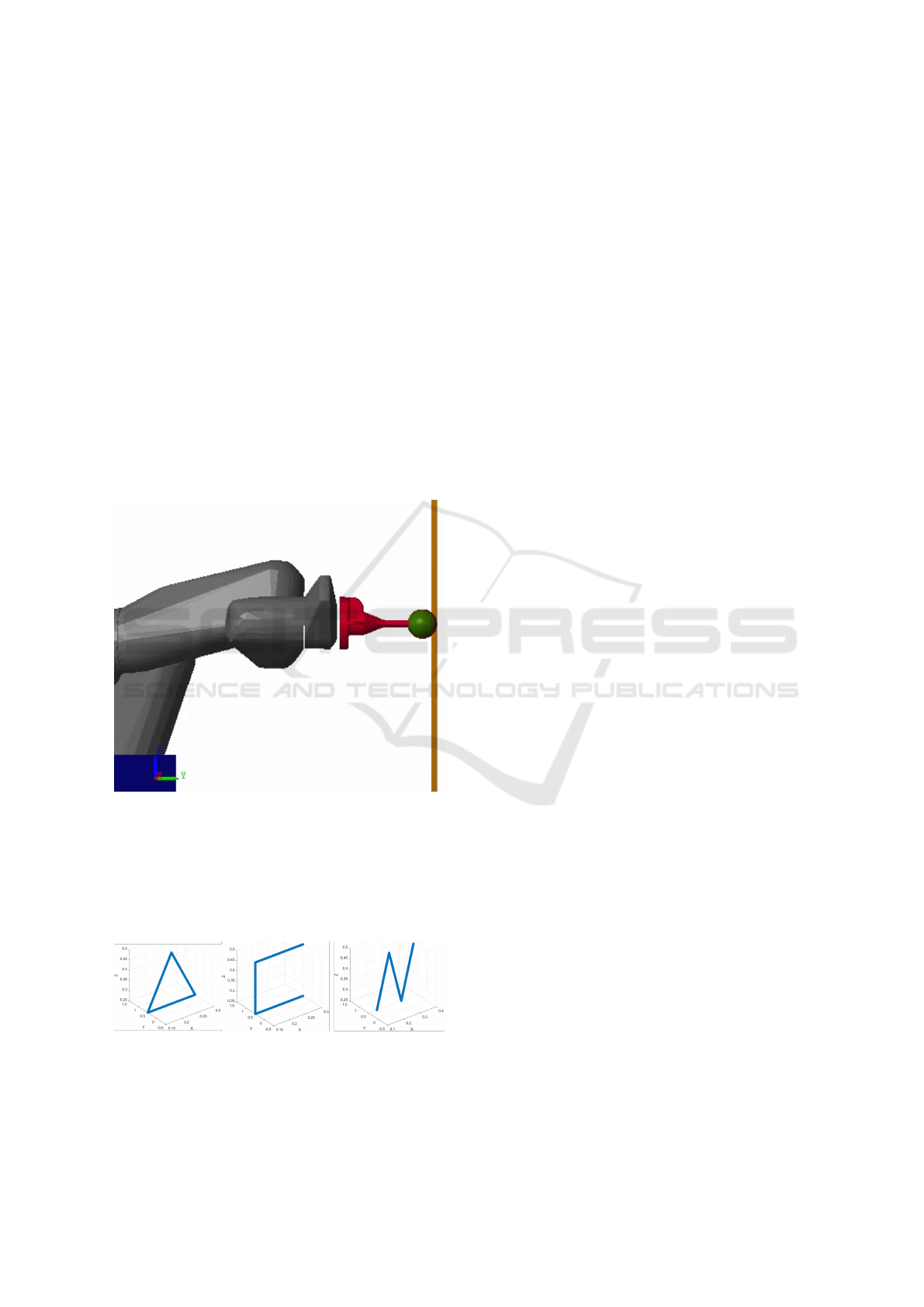
It should be noted that the contact trajectories
were performed using a steel end effector in the
form of a sphere with a radius of 0.025 m, which
penetrated the wall surface up to 0.005 m, ensuring
that it would always maintain contact, as illustrated
in Figure 1.
Figure 1: Franka robot end-effector and contact surface rep-
resentation in the simulation environment.
In addition, the type of trajectory that the robot
would perform is considered on the XZ axis of the
wall. The desired trajectories are shown below in Fig-
ure 2.
Figure 2: Desired robot trajectories to be imposed at the
end-effector level.
From these tests, a dataset was generated that in-
cluded detailed information about the robot’s interac-
tion with different surfaces, focusing on the resulting
joint torques and forces at the end effector level. Each
trajectory started from a stationary condition (initial
velocity equal to zero), with the initial position lo-
cated approximately 0.25 meters along the Z axis and
0.15 meters along the X axis. The corresponding ini-
tial joint configuration was defined as:
q
0
= [−0.906, 0.956, 2.16, −2.33, 2.63, 3.07, 2.9]
T
(rad). The robot then followed predefined paths in 3D
space (such as triangular, rectangular, and zigzag pat-
terns) at a controlled speed to simulate realistic task
conditions. These contact trajectories are representa-
tive of common industrial operations where surface
accuracy and conformity play a critical role, such as
automated inspection, deburring, surface polishing,
welding along contours, or aligning parts in tight as-
semblies. By analyzing the robot’s dynamic response
during these structured but diverse tasks, the dataset
provided a solid foundation for training a machine
learning model capable of classifying materials based
on interaction characteristics.
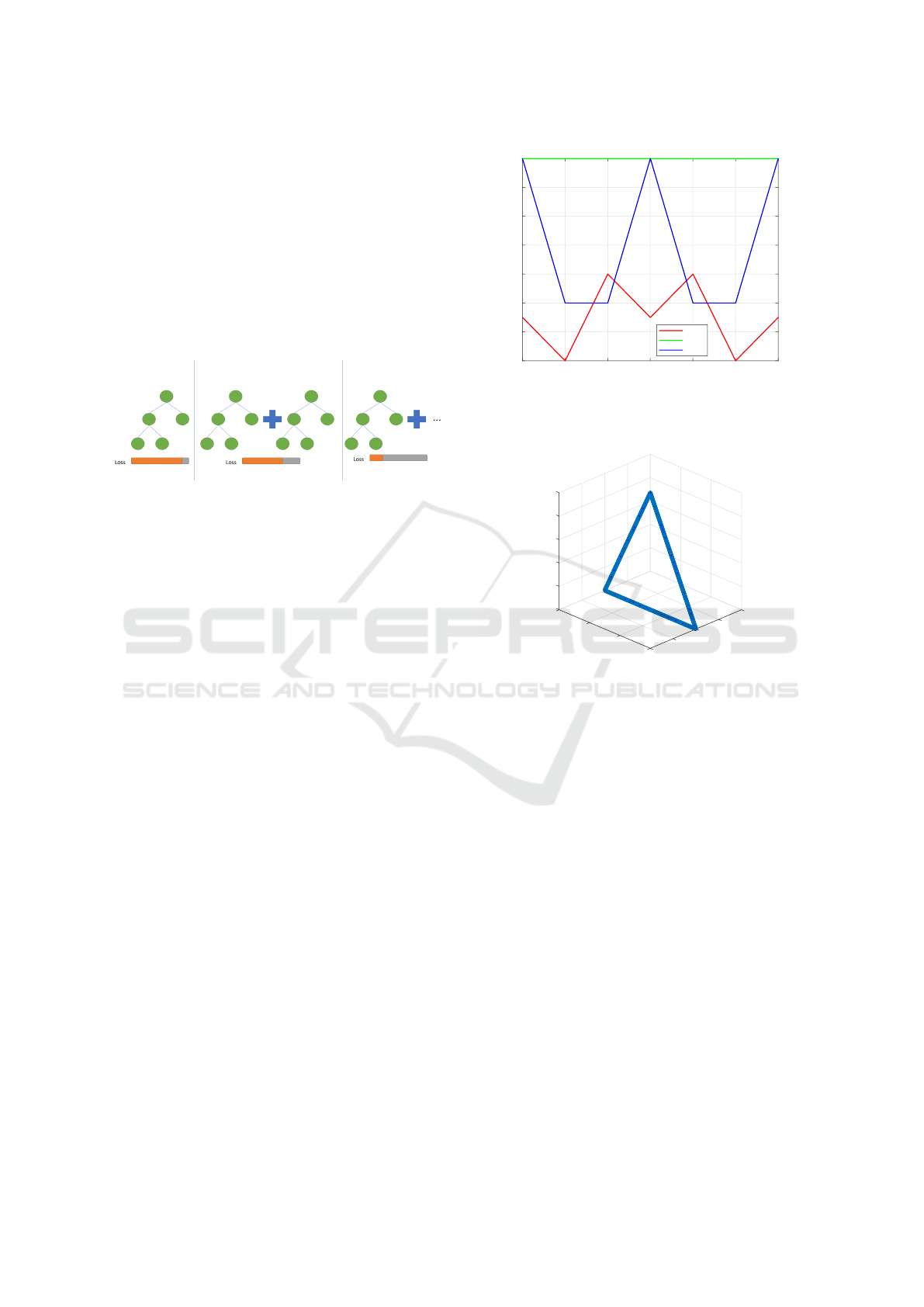
For the prediction model, we employed a ma-
chine learning algorithm based on gradient boost-
ing, specifically the CatBoost Classifier. This model
constructs an ensemble of symmetric decision trees
using an ordered boosting strategy, where each tree
sequentially corrects the residual errors of its pre-
decessors. The boosting process minimizes a de-
fined loss function—commonly cross-entropy for
classification—by fitting new trees to the gradient of
the loss, as illustrated in Figure 3, where orange bars
represent decreasing residuals across iterations.
CatBoost was selected for its efficient handling
of both numerical and categorical data, its robustness
against overfitting through built-in regularization, and
its low prediction latency—an essential feature for
real-time robotic applications. Compared to other
boosting frameworks, such as XGBoost (Chen and
Guestrin, 2016) and LightGBM (Ke et al., 2017), Cat-
Boost offers notable advantages in speed, accuracy,
and stability, particularly when working with small-
to-medium-sized datasets like those used in this study.
In addition to these benefits, CatBoost applies an
ordered boosting approach that effectively reduces
overfitting and prediction bias—especially beneficial
when training on sequential or temporally structured
datasets, such as those generated by repetitive contact
tasks in robotics. The use of symmetric, oblivious
decision trees ensures uniform and compact model
structures, enabling fast and deterministic inference,
which is critical for real-time control.
The selection of CatBoost was further supported
by its documented success in similar applications and
Predicting Contact Surfaces in Repetitive Robotic Tasks
277
its suitability for structured datasets with numerical
time series data. Its capacity to handle data imbal-
ance and minimize preprocessing requirements fur-
ther solidified its utility in this context. For instance,
even with fewer samples available for certain materi-
als, such as ice or Teflon, the model maintained robust
classification accuracy without resorting to additional
sampling strategies. Overall, CatBoost proved to be
a practical, efficient, and well-suited solution for con-
tact surface classification in dynamic robotic environ-
ments (Prokhorenkova et al., 2018).
Figure 3: CatBoost Algorithm.
3 RESULTS
This Section presents the simulation results evaluat-
ing the performance of the predictive surface contact
system in repetitive robotic tasks. The results are
divided into two main aspects: the robot’s behavior
under fixed impedance control and the accuracy of
the machine learning model for surface classification.
Regarding impedance control, it proved to be an ef-
fective tool for regulating the interaction between the
robot and its environment, enabling precise and safe
object manipulation under various conditions. Sev-
eral tests were performed with different configura-
tions and impedance parameters to evaluate their im-
pact on the stability and accuracy of the robot’s trajec-
tories. The first example trajectory is shown in Fig-
ures 4 and 5:
The system’s response was evaluated under realis-
tic conditions on a steel material, incorporating mild
internal disturbances and simulated noise to represent
a physical environment closer to the operational one.
Figures 6 and 7 show the evolution of the Cartesian
coordinates over time, where small oscillations on the
X axis stand out, indicative of greater directional sen-
sitivity to variations. In contrast, the Y and Z coor-
dinates present significantly more stable trajectories,
with a triangular shape with smooth transitions be-
ing especially noticeable in Z. This behavior demon-
strates that the implemented impedance control effec-
tively compensates for minor disturbances, preserving
both the continuity and precision of movement, which
is essential for safe physical interaction and precise
0 1 2 3 4 5 6
Time (s)
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Position (m)
End-Effector Cartesian Position Over Time
X Axis
Y Axis
Z Axis
Figure 4: Desired XYZ Cartesian trajectory over time.
3D Desired Trajectory of the End-Effector
0.15
0.2
0.25
0.3
X Position (m)
-0.5
0
0.5
1
1.5
Y Position (m)
0.25
0.3
0.35
0.4
0.45
0.5
Z Position (m)
Figure 5: Desired triangular shape to be followed by the
end-effector in contact tasks.
manipulation tasks. In Figure 6 we can clearly see the
transient behavior typical of this kind of systems, and
the steady state once it settles down according to the
path.
Without the presence of disturbing external forces,
the errors remain within a range of less than ±1.5 cen-
timeters, which demonstrates a precise and stable ex-
ecution of the imposed trajectory. These results con-
firm that the implemented impedance control man-
ages to maintain the required precision in controlled
environments, guaranteeing both safety and tracking
fidelity, essential aspects in repetitive contact tasks in
industrial contexts.
In a second experiment, external forces of up to
50 N were applied in various directions (X, Y, Z, and
combinations of these) to simulate perturbations di-
rectly to the end-effector. These forces were con-
figured as constant vector loads with a magnitude
of 50 N applied simultaneously along each Cartesian
axis, i.e., f
ext
= [50, 50, 50]
T
N. The perturbation was
activated from t = 4.0 s and maintained throughout
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
278
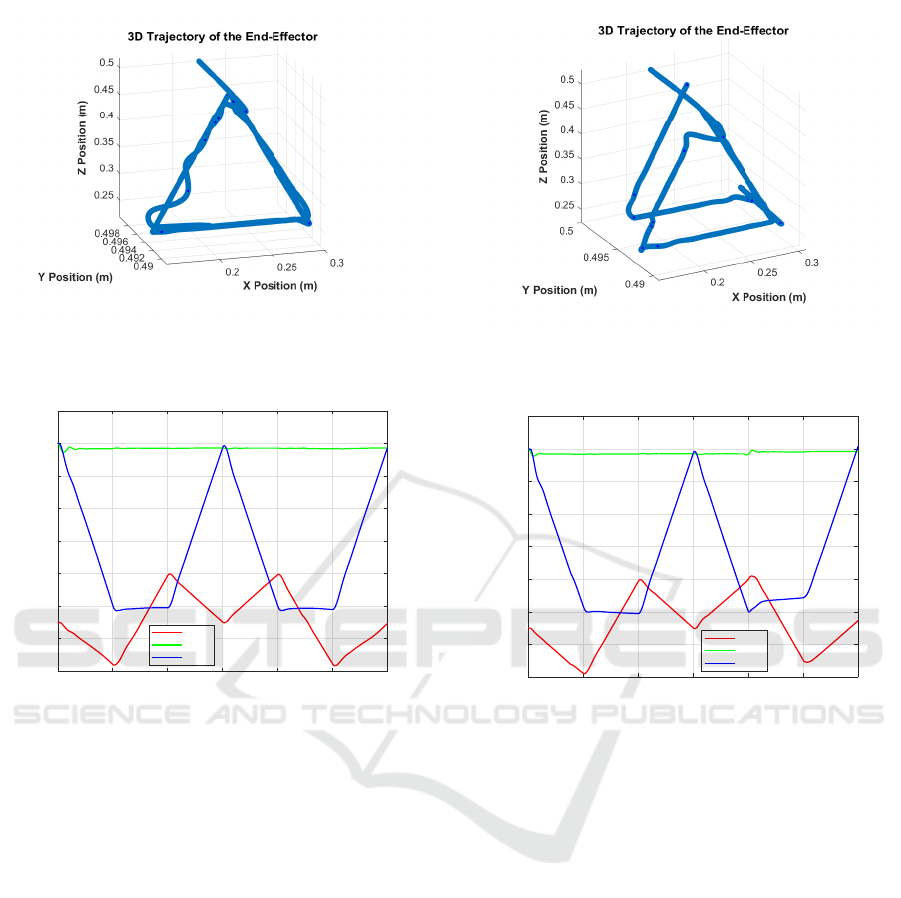
Figure 6: Actual trajectory shape followed by the end-
effector.
0 1 2 3 4 5 6
Time (s)
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
Position (m)
End-Effector Cartesian Position Over Time
X Axis
Y Axis
Z Axis
Figure 7: Actual XYZ Cartesian trajectory over time (t in
s).
the entire period.
Figure 9 clearly shows how these forces signif-
icantly affect the response of the system, especially
along the Z axis, where sharp peaks and sudden drops
are observed. This perturbation is also reflected in
the spatial trajectory plot, as seen in Figure 8, which
(considering the scale of the plot axis) slightly loses
its original shape, showing more transient behaviors
and misalignment, but eventually always stabilizing
and compensating for the perturbations.
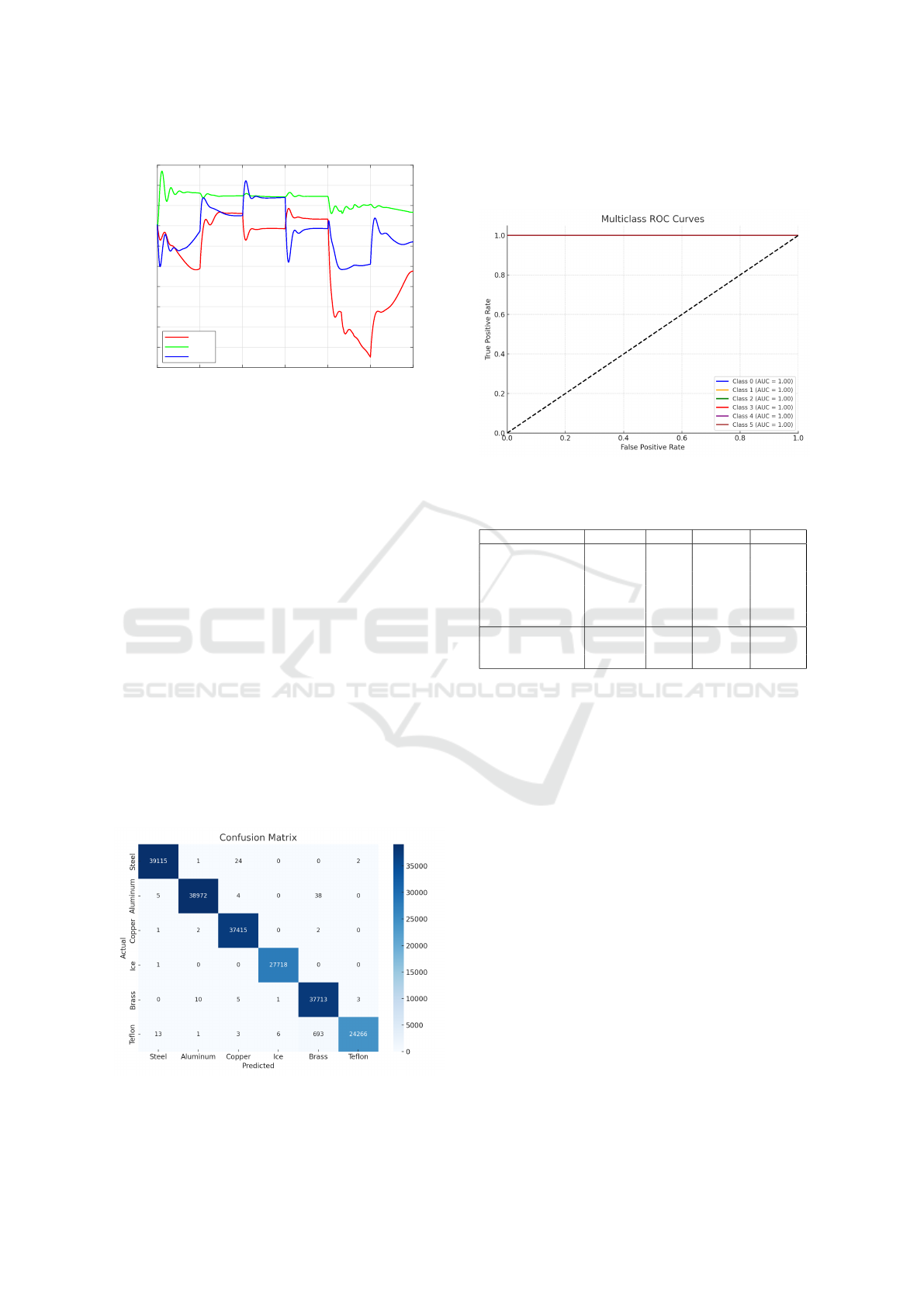
Figure 10 shows the Cartesian position error of the
end-effector in the X, Y and Z axes during the ap-
plication of constant external perturbations of 50N,
activated from second 4. It is observed that the X
axis is the most affected, reaching errors of around
3 cm, indicating a greater sensitivity to perturbations
in the plane of work possibly due to lower apparent
stiffness or a less robust configuration of the control
in that axis. The Z axis also experiences fluctua-
tions, although of lower magnitude, while the Y axis
maintains a relatively stable trajectory. This behav-
Figure 8: Actual trajectory shape followed by the end-
effector with external forces.
0 1 2 3 4 5 6
Time (s)
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
Position (m)
End-Effector Cartesian Position Over Time
X Axis
Y Axis
Z Axis
Figure 9: Actual XYZ Cartesian trajectory over time (t in s)
with external forces.
ior shows that the impedance control system manages
to compensate for the effects of the perturbations, but
not uniformly between the axes, suggesting the need
for adaptive strategies that allow a more balanced and
robust response in dynamic contact environments.
During all the tests, an extensive set of physical
and dynamic data was collected to capture the state
of the robot and its interaction with the environment.
The recorded data includes:
• End-Effector Kinematics: position, velocity,
and linear acceleration.
• Orientation and Angular Motion: quaternions,
angular velocities, and angular accelerations.
• Joint Efforts: measured torques at the seven
joints.
• Estimated Contact Forces: including force com-
ponents.
• Control Effort: direct and shaped control com-
mands.
Predicting Contact Surfaces in Repetitive Robotic Tasks
279
0 1 2 3 4 5 6
Time (s)
-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
Position Error (m)
Correct Cartesian Position Error (X, Y, Z)
Error X
Error Y
Error Z
Figure 10: Cartesian position error of the end-effector in X,
Y, and Z.
• Joint States: positions.
• Other Relevant Data: calculated torques, fric-
tion force, normal force, spring force, penetration
depth, and penetration velocity.
These variables formed the training dataset for the
predictive model, allowing it to identify dynamic pat-
terns associated with each surface type. Based on
these situations and the behavior of each of the spec-
ified trajectories, the CatBoostClassifier model was
trained to differentiate between steel, aluminum, cop-
per, ice, brass, and Teflon. Approximately 36 simu-
lations were carried out considering the six selected
materials (steel, aluminum, copper, ice, brass, and
Teflon) and three different trajectories: triangular,
rectangular, and zigzag, as illustrated in Figure 2. All
the generated information was compiled into a single
Excel database and subsequently divided for model
training using a 70% training and 30% testing ratio.
This showed excellent results for the learning
model.
Figure 11: Confusion Matrix.
We also evaluated performance and a detailed
classification report to see how efficient the trained
model is.
Figure 12: ROC Curve.
Table 1: Classification Report.
Class Precision Recall F1-score Support
0 - Steel 1.00 1.00 1.00 39142
1 - Aluminum 1.00 1.00 1.00 39019
2 - Copper 1.00 1.00 1.00 37420
3 - Ice 1.00 1.00 1.00 27719
4 - Brass 0.98 1.00 0.99 37732
5 - Teflon 1.00 0.97 0.99 24982
Accuracy - - 1.00 206014
Macro average 1.00 0.99 1.00 206014
Weighted average 1.00 1.00 1.00 206014
The CatBoostClassifier model achieved an over-
all accuracy of 99%, with outstanding F1 values in
all classes. Figure 11 presents the confusion ma-
trix, which shows perfect classification for almost all
classes, except for a slight decrease in the case of
Teflon, which was sometimes confused with materi-
als with similar characteristics, such as brass. The
confusion between brass and Teflon, both with close
friction coefficients, suggests the need to incorporate
frequency-domain features or complementary sensing
(e.g., vibration spectra). Figure 12 also shows the
ROC curve, where all classes have an area under the
curve (AUC) close to 1.0, demonstrating near-perfect
model performance, even in multi-class scenarios.
Table 1 summarizes the main evaluation indicators
by class: precision, recall, and F1-score. All classes
exceed 0.98 in each metric, with a weighted average
of 1.00, confirming the model’s ability to discriminate
between contact surfaces with high reliability.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
280

4 DISCUSSION
The obtained results confirm that impedance control
was effective in maintaining trajectory stability un-
der nominal conditions. The robot followed prede-
fined paths with continuity and precision, particularly
along the Z-axis, which reflects an appropriate con-
figuration of the stiffness and damping parameters.
However, small oscillations observed in the X-axis
indicate directional sensitivity, suggesting that axis-
specific variable parameter tuning with further joint
analysis or data-driven models might be beneficial in
future implementations.
When external forces of 50 N were applied in var-
ious directions, more transient behaviors were shown,
especially along the X and Z-axes. Sudden deviations
and slight loss of trajectory shape were observed, re-
vealing the limitations of using fixed impedance pa-
rameters in dynamic environments. These findings
point to the importance of integrating adaptive con-
trol strategies that allow real-time adjustment based
on external conditions. Additionally, we suspect that
these dynamic effects might also be related to the un-
resolved redundancy and internal motions of the sys-
tem (Saldarriaga and Kao, 2022), which is part of our
future work.
On the machine learning side, the CatBoostClas-
sifier demonstrated a strong ability to classify contact
surfaces, achieving 99% accuracy. Slight confusion
between materials with similar properties, such as
brass and Teflon, indicates that the model relies heav-
ily on dynamic patterns of interaction. Adding new
input features—such as high-frequency force or vi-
bration data—could improve the model’s robustness
in differentiating similar materials.
In summary, the integration of a predictive model
with impedance control enhances the robot’s ability to
interact safely and effectively with different surfaces.
This approach reduces the need for manual parameter
tuning and is particularly valuable in industrial set-
tings with varying contact conditions. Nonetheless,
testing in real-world environments and arbitrary sur-
face planes will be essential to validate the system’s
generalization and resilience to noise, sensor varia-
tion, and unmodeled external influences.
5 CONCLUSIONS
This work addressed a relevant challenge in industrial
robotics: predicting contact surfaces to optimize robot
performance during repetitive tasks. The implemen-
tation of impedance control proved effective in main-
taining stability and precision in the absence of dis-
turbances, while exposing limitations under external
force scenarios, especially along the Z-axis. These
findings underline the potential of adaptive control
methods to improve robustness in variable environ-
ments.
A key contribution was the integration of a ma-
chine learning model, CatBoostClassifier, after ob-
taining the data from several different scenarios.
The model achieved a high accuracy rate of 99%
when classifying six different materials, using fea-
tures extracted from the robot’s dynamic response.
However, difficulties distinguishing between materi-
als with similar friction characteristics, such as brass
and Teflon, suggest the need for richer sensory inputs
in future developments.
The following conclusions were drawn from this
research:
1. Impedance control enables smooth and stable in-
teractions under nominal conditions, but might be
sensitive to unexpected external forces.
2. The CatBoostClassifier demonstrated high relia-
bility for contact surface classification, with an
overall accuracy of 99%, although performance
decreased for materials with similar dynamic
properties.
3. The integration of machine learning with tradi-
tional control frameworks offers a promising path
to reduce manual tuning and adapt robot behavior
based on surface characteristics.
4. The approach can be especially useful in indus-
trial tasks such as surface inspection, assembly,
or polishing, where contact quality directly affects
efficiency and safety.
5. Future work should explore real-world implemen-
tation with multimodal sensors (e.g., vision and
force), as well as deep learning models to improve
generalization and robustness in unstructured en-
vironments.
ACKNOWLEDGEMENTS
This research has been partially funded by the Beatriu
de Pin
´
os Postdoctoral Research grant 2023 BP 00183
from the Generalitat de Catalunya.
REFERENCES
Ba, K.-X., Yu, B., Ma, G.-L., Gao, Z.-J., Zhu, Q.-X., Jin,
Z.-G., and Kong, X.-D. (2018). Dynamic compliance
Predicting Contact Surfaces in Repetitive Robotic Tasks
281

analysis for lhds of legged robot, part a: Position-
based impedance control. IEEE Access, 6:64321–
64332.
Campos, L. H., Fajardo-Pruna, M., Yumbla, F., and Saldar-
riaga, C. (2024). Modulating the dynamic response of
a redundant robot: a 3d linear displacement study. In
2024 10th International Conference on Mechatronics
and Robotics Engineering (ICMRE), pages 45–50.
Chen, T. and Guestrin, C. (2016). Xgboost: A scalable
tree boosting system. In Proceedings of the 22nd
ACM SIGKDD International Conference on Knowl-
edge Discovery and Data Mining, pages 785–794.
ACM.
Chen, W., Du, C., Liu, F., Men, Y., Zhang, X., and Li, B.
(2024). Dynamics modeling and impact response of a
rescue robot with two flexible manipulators. Journal
of the Brazilian Society of Mechanical Sciences and
Engineering, 46(4).
Elguea-Aguinaco, I., Serrano-Mu
˜
noz, A., Chrysostomou,
D., Inziarte-Hidalgo, I., Bøgh, S., and Arana-
Arexolaleiba, N. (2023). A review on reinforce-
ment learning for contact-rich robotic manipulation
tasks. Robotics and Computer-Integrated Manufac-
turing, 81:102517.
Hu, H., Wang, X., and Chen, L. (2020). Impedance
sliding mode control with adaptive fuzzy compensa-
tion for robot-environment interacting. IEEE Access,
8:19880–19889.
Ke, G., Meng, Q., Finley, T., Wang, T., Chen, W., Ma, W.,
Ye, Q., and Liu, T.-Y. (2017). Lightgbm: A highly ef-
ficient gradient boosting decision tree. In Advances in
Neural Information Processing Systems, volume 30.
Kroemer, O., Niekum, S., and Konidaris, G. (2021). A re-
view of robot learning for manipulation: Challenges,
representations, and algorithms. Journal of Machine
Learning Research, 22(30):1–82.
Kulkarni, P., Kulkarni, O., and Sayyad, J. K. (2024). Tuning
of a robotic arm using pid controller for robotics and
automation industry. In 2024 6th International Con-
ference on Energy, Power and Environment (ICEPE),
pages 1–6.
MathWorks (2022). Robotics System Toolbox (R2022b).
Natick, Massachusetts, United States.
Paz, B. T. S., Sorrosal, G., and Mancisidor, A. (2022). In-
telligent adaptative robotic system for physical inter-
action tasks. In 2022 Sixth IEEE International Con-
ference on Robotic Computing (IRC), pages 429–430.
Prokhorenkova, L., Gusev, G., Vorobev, A., Dorogush,
A. V., and Gulin, A. (2018). Catboost: Unbiased
boosting with categorical features. In Advances in
Neural Information Processing Systems 31 (NeurIPS),
pages 6638–6648.
Rezaie, K. and Haeri, A. (2011). Using pca and pareto op-
timality to select flexible manufacturing systems. In
2011 IEEE International Systems Conference, pages
538–541.
Saldarriaga, C. and Kao, I. (2022). Impedance Control on
Redundant Manipulators With Zero-Potential-Energy
Motions: Theory and Experimental Validation. Jour-
nal of Mechanisms and Robotics, 15(5):051010.
Suomalainen, M., Karayiannidis, Y., and Kyrki, V. (2022).
A survey of robot manipulation in contact. Robotics
and Autonomous Systems, 156:104224.
Villani, L. and De Schutter, J. (2008). Force control. In
Siciliano, B. and Khatib, O., editors, Springer Hand-
book of Robotics, pages 161–185. Springer, Berlin,
Heidelberg.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
282
