
ROSBLOCKS: A Visual Programming Interface for ROS2 Robots
Fernando Costa Nogueira
1 a
, Dieisson Martinelli
1,2 b
, Lucas Alexandre Zick
1,2 c
,
Andr
´
e Schneider de Oliveira
2 d
and Vivian Cremer Kalempa
1 e
1
Department of Information Systems, Universidade do Estado de Santa Catarina (UDESC), S
˜
ao Bento do Sul, Brazil
2
Graduate Program in Electrical and Computer Engineering, Universidade Tecnol
´
ogica Federal do Paran
´
a (UTFPR),
Curitiba, Brazil
Keywords:
ROS2, Blockly, Visual Programming, Educational Robotics.
Abstract:
This work presents the development of a visual programming interface for robots compatible with ROS2,
called ROSBLOCKS, using a modern architecture based on React, Blockly, Node.js, and Electron. The pro-
posal aims to make robot programming more accessible, especially in educational contexts, by allowing users
to create complex robotic behaviors through visual blocks, without the need for prior knowledge in program-
ming languages such as Python or C++. The system is cross-platform and flexible, working with both sim-
ulated and physical robots that use ROS2, and allows for automatic code generation and execution from the
visual assembly. Additionally, the system was designed to facilitate integration with different types of ROS2
topics, services, and actions. The system was tested in the classroom with undergraduate students who already
have practical experience with ROS, enabling an assessment of its applicability in real teaching scenarios and
allowing the observation of gains in productivity, engagement, and clarity in the construction of robotic be-
haviors. The complete source code and all validation materials from this study are openly available on GitHub
at https://github.com/ferssor/rosblocks.
1 INTRODUCTION
The use of robots has significantly expanded across
various domains, such as education (Favaretto et al.,
2024), industry (Lettera et al., 2025), agriculture
(Maldonado-Mendez et al., 2025), and scientific re-
search (Martinelli et al., 2020; Zick et al., 2024;
Kalempa et al., 2023). In this context, the Robot Op-
erating System (ROS) has established itself as one of
the main platforms for the development of robotic ap-
plications, offering a modular, scalable infrastructure
that is widely adopted by both the academic and in-
dustrial communities (Patkar et al., 2023). With the
emergence of ROS2, substantial improvements have
been incorporated, such as support for distributed sys-
tems, security, real-time capabilities, and a standard
middleware, making it even more attractive for robust
and collaborative projects.
a
https://orcid.org/0009-0009-4751-0546
b
https://orcid.org/0000-0001-7589-1942
c
https://orcid.org/0009-0001-8645-9781
d
https://orcid.org/0000-0002-8295-366X
e
https://orcid.org/0000-0001-9733-7352
Despite these advantages, the learning curve of
ROS2 remains a challenge, especially for beginners
or undergraduate students in the early stages of their
academic journey. The need to understand concepts
such as nodes, topics, services, and actions, combined
with the use of programming languages like Python or
C++, can represent a significant entry barrier. Tools
that simplify this complexity and make robot pro-
gramming more accessible are, therefore, of great im-
portance.
Some solutions have sought to address this need
through visual programming interfaces. TurtleBot3
Blockly (Industries, 2017) allows programming the
TurtleBot3 using visual blocks integrated with ROS,
but it is strongly coupled to that specific robot and ver-
sion of ROS. The Robot Ignite Academy (The Con-
struct, 2025), developed by The Construct, offers an
online environment with simulations and block sup-
port, but requires a cloud connection and is gener-
ally geared toward controlled exercises. Another ap-
proach is the use of tools like Niryo Studio (Niryo,
2025), designed for Niryo’s robotic arms, which also
uses Blockly blocks but is specific to the brand’s own
Nogueira, F. C., Martinelli, D., Zick, L. A., Schneider de Oliveira, A. and Kalempa, V. C.
ROSBLOCKS: A Visual Programming Interface for ROS2 Robots.
DOI: 10.5220/0013714000003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 267-274
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
267

robots.
The solution presented in this work stands out for
its generality and portability: it is a cross-platform
system that allows the creation of visual programs for
any robot using ROS2, without depending on specific
robots or external infrastructures. The system can be
run locally on conventional computers and offers a di-
rect bridge to ROS2 topics, services, and actions, en-
abling full control of real or simulated robots through
visual blocks.
This work presents the development of a block-
based visual programming interface designed to
facilitate the use of ROS2 through an intuitive
graphical experience. The system was built us-
ing modern web and desktop development tech-
nologies React(React, 2025), Blockly(Google, 2025),
Node.js(Node.js, 2025), and Electron(OpenJS Foun-
dation, 2025) and enables the creation of robot pro-
grams through a drag-and-drop block logic, abstract-
ing implementation details and syntax.
The proposed solution is cross-platform, exten-
sible, and compatible with any robot using ROS2,
whether in a simulated or real environment. The sys-
tem was validated in the classroom with undergrad-
uate students who already had prior experience with
ROS, allowing the observation of gains in clarity, pro-
ductivity, and engagement in building robotic behav-
iors.
This paper is organized as follows: Section 2
presents related work and existing visual program-
ming solutions in robotics; Section 3 describes the
system architecture; Section 4 presents use cases and
tests in an educational environment; Section 5 dis-
cusses the results and limitations; and Section 6 pro-
vides the conclusions and future directions for the
project.
2 RELATED WORKS
Several initiatives aim to simplify the development of
robotic applications through visual programming in-
terfaces, especially in educational contexts. These ap-
proaches are inspired by the success of tools such as
Scratch (Resnick et al., 2009), which popularized the
use of visual blocks to introduce programming logic
in an accessible way. In robotics, this paradigm has
been applied at different levels of complexity and in-
tegration with middlewares such as ROS.
One of the most well-known solutions is Turtle-
Bot3 Blockly, developed by ROBOTIS, which allows
controlling the TurtleBot3 robot through a Blockly in-
terface integrated with ROS. While effective for in-
troducing robotics, this tool is strongly coupled to the
TurtleBot3 robot and to the ROS version, limiting its
applicability in more general contexts or with differ-
ent robot platforms.
Its main merit lies in its educational approach,
which makes the learning process more accessible,
especially for high school students or early under-
graduates. Through pre-configured blocks, users can
perform tasks such as moving the robot, reading sen-
sors, and executing conditional behaviors without
writing code in Python or C++.
In contrast, the system proposed in this work was
designed to operate with any robot that uses ROS2, re-
gardless of model or manufacturer, and allows modu-
lar creation of new Blockly blocks directly connected
to the specific resources of each robot. This pro-
vides greater flexibility, reusability, and applicability
in both educational and industrial contexts.
The Robot Ignite Academy, developed by the
company The Construct, offers an online environment
for learning ROS with real-time simulations. Al-
though the platform provides visual blocks in some
introductory courses, their use is restricted to the
cloud environment, requiring a constant connection
and a subscription structure. Furthermore, the code
generation is more focused on demonstration than on
direct applications with local physical robots.
The system offers a complete learning experience,
allowing users to switch between code, simulation,
and conceptual explanations within the same web en-
vironment. In addition, it supports both ROS and
ROS2 in several courses, making it an excellent teach-
ing tool for beginners and intermediate users.
The system proposed in this paper stands out for
its local execution and independence from the cloud,
offering a Blockly interface that can be used directly
with real robots controlled via ROS2. Furthermore,
the tool is designed to be freely extensible, allow-
ing the creation of custom blocks that connect to any
ROS2 node, which expands its applicability for both
teaching and the development of real-world applica-
tions.
These characteristics make the tool especially at-
tractive for use in technical and university level educa-
tional environments, promoting autonomy in the con-
struction of robotic behaviors and incremental learn-
ing of ROS2.
3 SYSTEM ARCHITECTURE
The system developed in this work was designed with
the goal of providing an accessible, modular visual
programming interface compatible with any robot us-
ing ROS2. To achieve this, an architecture based
on modern frontend and backend technologies was
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
268

adopted, with a strong emphasis on extensibility and
portability.
The system architecture is composed of three
main layers, each responsible for a specific role in
the application’s operational flow: (i) the visual in-
terface layer (frontend), which provides the user with
an intuitive block-based programming experience; (ii)
the middleware layer (backend), which interprets the
blocks and manages communication between the in-
terface and the robots; and (iii) the robotic execution
layer, composed of the ROS2 environment, which ex-
ecutes commands and controls the robots, whether
simulated or real.
The flowchart presented in Figure 1 illustrates the
communication flow between the editor and the ROS2
API (Application Programming Interface). When the
user interacts with the graphical interface, a request is
sent to the middleware, which in turn translates this
request into a command compatible with the ROS2
command-line interface (CLI). The execution occurs
in the backend, and the response, containing the re-
quested data or the result of the operation, is then re-
turned to the user.
Figure 1: Request and response flow.
One of the main differentiators of the system is the
functionality that allows creating and managing ROS
workspaces and packages directly through the visual
interface. Through this integration, the user can gen-
erate new ROS2 packages with customized dependen-
cies, create internal nodes, and encapsulate the code
generated by the blocks into scripts compatible with
the ROS2 ecosystem.
This integration strengthens the bridge between
visual programming and traditional textual develop-
ment, offering a continuous and coherent experience.
Additionally, it promotes good project organization
practices by introducing from the outset the modular
structure characteristic of ROS, with its concepts of
packages and nodes.
3.1 Frontend
The visual interface layer is responsible for pro-
viding the user with an accessible, interactive,
and intuitive experience for building robotic pro-
grams. This interface was developed using Re-
act(React, 2025), a widely adopted JavaScript li-
brary for modern interface development, in conjunc-
tion with Blockly(Google, 2025), a Google library for
block-based visual programming.
The frontend layer was implemented with a focus
on modularity, responsiveness, and seamless integra-
tion with the backend and the ROS2 system. It uses
React(React, 2025) to build the user interface, lever-
aging the paradigm of reusable components and ef-
ficient Document Object Model (DOM)(Mozilla De-
veloper Network, 2025) manipulation through the vir-
tual DOM. The styling and visual organization follow
modern responsive design standards, with automatic
adaptation to different screen resolutions.
Visual programming is made possible through the
Blockly(Google, 2025) library, embedded as a custom
React component. Each Blockly block is defined as
an Extensible Markup Language (XML) template ex-
tended with dynamic toolboxes, where the blocks are
directly mapped to Python(Python Software Founda-
tion, 2025) source code templates. This code gen-
eration is handled by a code generator adapted from
Blockly.Python, extended to support ROS2-specific
semantic structures such as rclpy, node, topic publish-
ing and subscribing, and timer usage.
The system allows the code generated from block
manipulation to be displayed in real time in an em-
bedded text editor, enabling switching between visual
and textual programming. Additionally, the interface
allows the user to create, open, and manage ROS2
workspaces, with support for multiple packages, files,
and nodes, ensuring that the generated structure com-
plies with the official ROS2 directory convention.
Figure 2 presents an example of creating a func-
tional publisher node using the ROSBLOCKS editor.
Figure 2: ROSBLOCKS editor with a functional publisher
node.
The platform provides visual blocks that enable
the construction of specific robotic behaviors in an in-
tuitive way. After building the node, its execution can
be initiated directly from the editor, facilitating quick
validation of its functionality. The entire process of
script generation and inclusion of the required pack-
ages is performed automatically, reducing complexity
ROSBLOCKS: A Visual Programming Interface for ROS2 Robots
269
for the user and accelerating the development cycle.
However, the entire orchestration between the in-
terface, data persistence, flow control, and ROS2
command execution depends on a robust intermedi-
ate layer. This responsibility lies with the backend,
whose role is to mediate interactions between the user,
the local file system, and the ROS2 execution layer.
3.2 Backend
The application’s backend functions as a middleware
between the visual interface and the ROS2 environ-
ment, being responsible for interpreting commands
from the frontend, performing file system operations,
and forwarding instructions to the ROS execution
layer. This modular architecture ensures decoupling
between interface and execution, promoting system
portability and scalability.
The application was developed using
Node.js(Node.js, 2025), which provides an asyn-
chronous, event-driven runtime environment ideal
for file manipulation, process execution, and real-
time communication with the frontend via IPC
(interprocess communication). The use of the
Electron(OpenJS Foundation, 2025) framework
allows the system to be packaged as a cross-platform
desktop application, combining web technologies
(JavaScript, HTML, CSS) with native operating
system access, including reading and writing files,
creating directories, and executing shell commands.
The backend handles requests such as: workspace
creation, ROS2 package generation, node inclusion,
automatic saving of executable Python(Python Soft-
ware Foundation, 2025) files, and script execution
in integrated terminals. Each frontend request is
mapped to a backend routine, which performs valida-
tions and then executes the corresponding ROS2 CLI
commands (ros2 pkg create, ros2 run, etc.). Commu-
nication between layers is carried out using messages
structured in JavaScript Object Notation (JSON), en-
suring interoperability and ease of debugging.
Additionally, the backend maintains an abstrac-
tion of the ROS2 directory structure within the appli-
cation, dynamically mirroring the actual state of the
workspace in the editor. This ensures that any opera-
tion performed in the interface accurately reflects the
state of the ROS development environment.
With this structure, the backend acts as the link be-
tween the system’s visual logic and the actual ROS2
processes, but it is not directly responsible for robotic
execution, a role played by the ROS2 layer.
3.3 ROS2 Layer
The ROS2 layer is responsible for executing the
scripts generated in the editor, as well as handling
middleware requests. Its main role is to serve as
a bridge between the visual elements and the actual
ROS2 ecosystem, converting user actions into nodes,
topics, and other entities typical of the ROS architec-
ture.
This layer interacts directly with the ROS2
command-line interface (CLI), using commands such
as ros2 run, ros2 topic, ros2 service, among others,
to launch nodes, monitor topics, publish messages, or
retrieve system information. Script execution is han-
dled via Node.js(Node.js, 2025), which triggers sub-
processes in the locally installed ROS2 environment.
As a result, the system ensures full compatibility with
native ROS2 tools and allows the visual code gener-
ated to be tested, executed, and debugged within the
same environment used by professionals in the field.
This approach is especially advantageous for be-
ginners, as it abstracts the complexity associated with
directly handling the command line and the ROS2 file
structure. At the same time, it maintains fidelity to
the original ROS architecture, allowing visually de-
veloped projects to be exported, manually edited, and
used in professional environments.
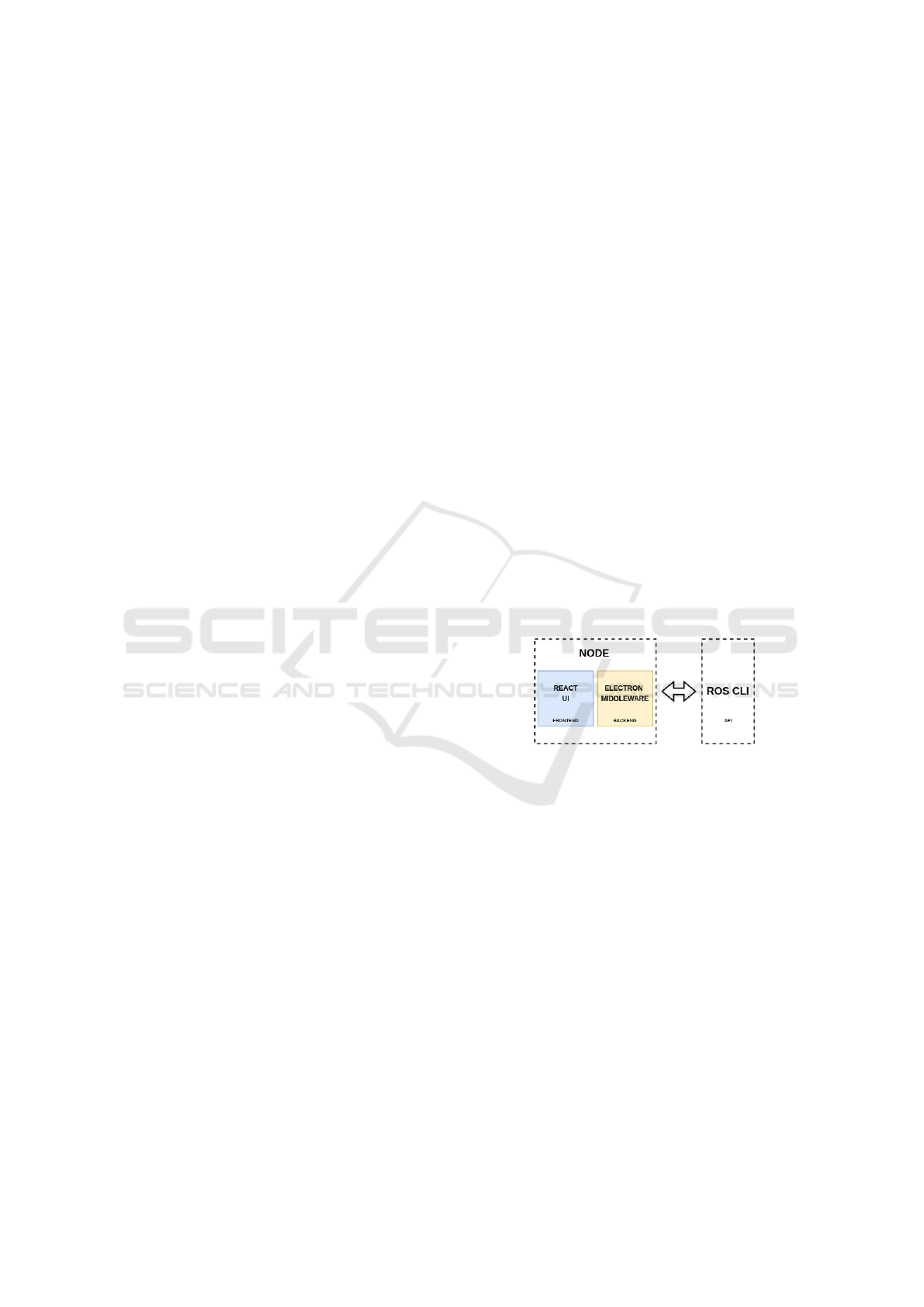
Figure 3: Editor architecture diagram.
Figure 3 illustrates the architecture of the editor,
where the application functions as a repository that
houses the user interface and middleware layers. The
Node.js(Node.js, 2025) is responsible for executing
these scripts, and the request is made by executing a
command in the ROS command-line interface, which
runs and provides important information about the
ROS node.
4 VALIDATION
In order to validate the applicability and pedagogical
effectiveness of the proposed system, controlled tests
were conducted in an educational environment with
undergraduate students from the Information Systems
program at the State University of Santa Catarina
– CEPLAN. The participants had prior exposure to
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
270
the ROS ecosystem, having completed practical ac-
tivities with both simulated and real robots using
traditional programming in Python(Python Software
Foundation, 2025).
The integration of the system into the robotics
course aimed to investigate its ability to:
• Reduce the complexity of programming robotic
behaviors;
• Accelerate the development of tasks with ROS2
robots;
• Promote greater clarity in the logical structure of
programs;
• Stimulate students’ creativity and engagement
through the visual interface.
The tests were conducted in a laboratory en-
vironment with workstations running the Ubuntu
24.04(Canonical, 2025) Linux operating system and
the ROS2 Jazzy Jalisco distribution. Each station was
equipped with the developed interface, allowing the
creation, editing, and execution of nodes directly from
the provided visual blocks.
For educational and experimental control pur-
poses, the Turtlesim simulator (ROS Documentation,
2025) was used due to its simplicity, lightweight na-
ture, and compatibility with fundamental ROS2 con-
cepts. This choice enabled a focus on programming
logic while abstracting hardware complexities.
During the activities, students were challenged to
complete a set of tasks with increasing complexity,
including basic movement control with linear and an-
gular velocity adjustments, reading and processing
data from simulated sensors with reactive responses
to environmental stimuli, and finally, the implementa-
tion of a simple proportional-integral-derivative (PID)
logic for trajectory control.
All tasks were developed exclusively using the
blocks provided in the interface, without the need to
manually write code. The experience allowed for the
verification of the tool’s expressiveness and its ability
to represent complex control and flow structures in an
accessible way.
The system evaluation was conducted through a
survey with structured Likert scale questions (Likert,
1932), complemented by direct observations during
the practical activities. The results were analyzed in
terms of perceived usability, clarity in program struc-
ture, and impact on student engagement.
The survey was completed by a total of 10 stu-
dents immediately after the conclusion of the practical
activities. The Likert scale ranged from 1 (strongly
disagree) to 5 (strongly agree). Responses were sta-
tistically analyzed using measures of central tendency
(mean and standard deviation), in addition to quali-
tative analysis of open-ended responses. Among the
evaluated aspects, highlights include: ease of use of
the interface, understanding of node and topic con-
cepts, perception of productivity gains, and overall
satisfaction with the experience.
5 RESULTS
The system evaluation was conducted with 10 un-
dergraduate students from the Information Systems
program at the State University of Santa Cata-
rina (UDESC/CEPLAN), all enrolled in a practical
robotics course that uses ROS2 as its technological
foundation. The participants had previous exposure to
ROS through activities involving Python(Python Soft-
ware Foundation, 2025) programming and the control
of both simulated and real robots.
The evaluation instrument was a structured ques-
tionnaire composed of 23 items, of which 16 were for-
mulated using a 5-point Likert scale (1 = strongly dis-
agree, 5 = strongly agree), and 7 were open-ended and
demographic questions aimed at gathering qualitative
feedback and characterizing the participants’ profiles.
Of the 10 students, 100% had previously used
ROS, with 80% reporting an intermediate level of fa-
miliarity and 20% a basic level. Furthermore, 60% of
the students had used some form of visual program-
ming tool before, such as Scratch(MIT Media Lab,
2025) or Blockly-based interfaces.
The responses to the Likert scale questions were
grouped into four main dimensions: usability, logical
clarity, understanding of ROS2 concepts, and engage-
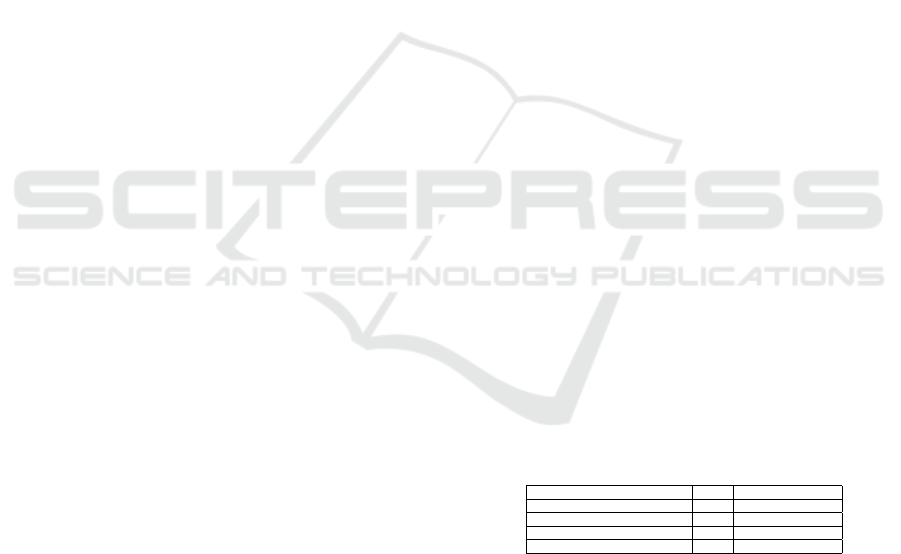
ment with the tool. Table 1 summarizes the means
and standard deviations for each dimension.
Table 1: Means and standard deviations of the evaluated
dimensions.
Dimension Mean Standard Deviation
Usability 4,40 0,81
Clarity and Logical Structure 4,65 0,66
Understanding of ROS2 concepts 4,70 0,67
Engagement and motivation 4,76 0,52
It was observed that all dimensions obtained av-
erage scores above 4, highlighting a broadly positive
perception among students regarding the block-based
programming tool for ROS2.
The Engagement and Motivation dimension stood
out with the highest average (4.76) and the lowest
standard deviation (0.52), indicating not only a high
level of student involvement but also low variability
in responses, suggesting consensus on the motivating
nature of the tool.
The Understanding of ROS2 Concepts dimension
ROSBLOCKS: A Visual Programming Interface for ROS2 Robots
271
also showed a high average (4.70), demonstrating that
the visual interface significantly contributed to the
technical learning of the ROS architecture, particu-
larly in understanding nodes, topics, and messages.
The Logical Clarity and Structure (4.65) and Us-
ability (4.40) dimensions also received positive eval-
uations. However, usability showed the highest stan-
dard deviation (0.81), indicating greater variation in
students’ experiences with the interface—possibly re-
lated to factors such as prior familiarity with vi-
sual programming environments, first contact with the
tool, or with the logic of block construction.
These quantitative results reinforce the effective-
ness of the tool both as an educational resource and
as a means of engagement, making it particularly rel-
evant for introducing ROS2 in an accessible and mo-
tivating way to undergraduate students.
The open-ended responses were analyzed using
thematic content analysis, revealing four main cat-
egories: ease of use, improved conceptual under-
standing, creativity, and suggestions for expansion, as
shown in Table 2.
Table 2: Thematic Categories Extracted from Open-Ended
Responses.
Category Example Responses
Ease of Use “I liked how intuitive the
tool is, and how easily you
can follow a logical flow.”
Conceptual Clarity “I was able to understand
more easily how nodes,
publishers, and subscribers
work.”
Creativity/Exploration “I felt more motivated to
learn ROS2.”
Improvement Suggestions “Avoid manually repeat-
ing names in chained
blocks by allowing reuse
through dropdown or auto-
complete.”
The most frequent mentions were concentrated in
the categories Ease of Use and Conceptual Clarity,
reflecting the students perception that the tool con-
tributed to making the development process more ac-
cessible and intuitive, even for those with limited
prior familiarity with ROS2 or programming in gen-
eral.
In the Ease of Use category, comments high-
lighted the intuitive interface and the logical linear-
ity in constructing programs through blocks, which
aligns with the high satisfaction levels observed in the
quantitative usability questions. Meanwhile, the Con-
ceptual Clarity category underscores the tool’s poten-
tial to make fundamental ROS2 components, such as
nodes, topics, and messages—more understandable,
fostering active and practical learning of these con-
cepts.
Additionally, the Creativity/Exploration category
shows that students not only understood the concepts
but also felt encouraged to experiment with new ideas,
indicating an environment conducive to engagement
and autonomy in the learning process.
Finally, the Improvement Suggestions category
gathers relevant observations about limitations per-
ceived by users, such as the need for features that en-
hance the reuse of fields between blocks. These con-
tributions are valuable for improving the tool, show-
ing that students acted not only as users but also as
critical collaborators in the pedagogical development
process.
This qualitative analysis complements the quanti-
tative data, offering a deeper insight into how the tool
was perceived in terms of usability, learning, and mo-
tivation.
The collected data demonstrate that the tool
achieved the proposed educational objectives: it facil-
itated the programming of ROS2 robots, increased the
structural clarity of programs, and promoted greater
student engagement. Moreover, the fact that students
themselves suggested future expansions of the tool in-
dicates a high level of ownership and interest in the
technology.
6 CONCLUSION
This work presented the development and valida-
tion of a visual programming system for robots that
use the ROS2 middleware, aiming to facilitate the
learning and development of robotic behaviors in ed-
ucational environments. The proposed tool com-
bines a graphical interface built with React(React,
2025) and Blockly(Google, 2025) with a backend in
Node.js(Node.js, 2025) and Electron(OpenJS Foun-
dation, 2025), enabling the creation, editing, and exe-
cution of ROS2 nodes directly from visual blocks.
Unlike other existing solutions, which are often
restricted to specific robots or limited to cloud-based
environments, the system described here stands out
for its flexibility, portability, and compatibility with
any ROS2-based robot. Additionally, it allows the
creation and organization of ROS packages directly
through the interface, seamlessly integrating the vi-
sual paradigm with the modular structure native to
ROS.
The validation conducted with undergraduate stu-
dents demonstrated promising results: the tool was
positively evaluated in terms of usability, clarity in
program structuring, and positive impact on student
engagement. Participants reported that the visual in-
terface facilitated the understanding of fundamental
ROS2 concepts and encouraged experimentation and
creativity in the development of robotic behaviors.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
272

Despite the positive results, some limitations were
observed. The tool still relies on pre-configured
blocks and lacks support for advanced features such
as complex actions, integration with Artificial Intel-
ligence (AI) or computer vision pipelines, and vi-
sual debugging mechanisms. Furthermore, the valida-
tion sample was relatively homogeneous, composed
of students with prior experience in ROS, which may
limit the generalizability of the results.
As a continuation perspective, the expansion of
the block library is proposed to include specific sen-
sors and actuators, integration with more advanced
simulators such as Gazebo, and the application of the
tool at other educational levels, such as technical ed-
ucation and teacher training. The addition of collab-
orative features and visual debugging resources also
emerges as a promising path to make the system even
more complete.
In summary, the developed tool represents a sig-
nificant advancement toward making ROS2 more ac-
cessible and educational by facilitating the teaching
and development of robotic applications through a vi-
sual, modular, and extensible approach.
ACKNOWLEDGEMENTS
The project is supported by the National Council for
Scientific and Technological Development (CNPq)
under grant number 407984/2022-4; the Fund for
Scientific and Technological Development (FNDCT);
the Ministry of Science, Technology and Innovations
(MCTI) of Brazil; Brazilian Federal Agency for Sup-
port and Evaluation of Graduate Education (CAPES);
the Araucaria Foundation; the General Superinten-
dence of Science, Technology and Higher Education
(SETI); and NAPI Robotics.
REFERENCES
Canonical (2025). Ubuntu: Open source operating sys-
tem for enterprise and developers. Avaliable: https:
//ubuntu.com/. Accessed: 2025-07-30.
Favaretto, D., de Assis, V., Martinelli, D., Schneider
De Oliveira, A., and Kalempa, V. (2024). Low-cost
robot construction focused on educational environ-
ments. Proceedings of the 21st International Con-
ference on Informatics in Control, Automation and
Robotics, pages 66–72.
Google (2025). Blockly: A visual programming editor.
Avaliable: https://developers.google.com/blockly?hl=
en. Accessed: 2025-03-07.
Industries, D. (2017). Turtlebot3 blockly documenta-
tion. Avaliable: https://turtlebot-3-blockly-wiki.
readthedocs.io/. Accessed: 2025-06-04.
Kalempa, V. C., Piardi, L., Limeira, M., and de Oliveira,
A. S. (2023). Multi-robot task scheduling for
consensus-based fault-resilient intelligent behavior in
smart factories. Machines, 11(4).
Lettera, G., Costa, D., and Callegari, M. (2025). A hybrid
architecture for safe human–robot industrial tasks. Ap-
plied Sciences, 15(3):1158.
Likert, R. (1932). A technique for the measurement of atti-
tudes. Archives of Psychology, 22(140):1–55.
Maldonado-Mendez, C., Ruiz-Paz, S. F., Machorro-Cano,
I., Marin-Hernandez, A., and Hernandez-Mendez, S.
(2025). The optimization of pid controller and color
filter parameters with a genetic algorithm for pineap-
ple tracking using an ros2 and microros-based robotic
head. Computation, 13(3):69.
Martinelli, D., Cerbaro, J., Fabro, J. A., de Oliveira, A. S.,
and Teixeira, M. A. S. (2020). Human-robot interface
for remote control via iot communication using deep
learning techniques for motion recognition. In 2020
Latin American Robotics Symposium (LARS), 2020
Brazilian Symposium on Robotics (SBR) and 2020
Workshop on Robotics in Education (WRE), pages 1–
6. IEEE.
MIT Media Lab (2025). Scratch: Imagine, program, share.
Avaliable: https://scratch.mit.edu/. Accessed: 2025-
04-04.
Mozilla Developer Network (2025). Introduction to
the dom. Avaliable: https://developer.mozilla.org/
en-US/docs/Web/API/Document Object Model/
Introduction/. Accessed: 2025-07-30.
Niryo (2025). Niryostudio: Application for robotics pro-
gramming and simulation. Avaliable: https://niryo.
com/niryostudio/. Accessed: 2025-06-04.
Node.js (2025). Node.js: Javascript runtime environment.
Avaliable: https://nodejs.org. Accessed: 2025-03-07.
OpenJS Foundation (2025). Electron: Build cross-platform
desktop apps with javascript, html, and css. Avaliable:
https://www.electronjs.org. Accessed: 2025-03-07.
Patkar, U. C., Mandhalkar, V., Chavan, A., Songire, S., and
Kothawade, H. (2023). Robot operating system: A
comprehensive analysis and evaluation. International
Journal of Intelligent Systems and Applications in En-
gineering, 12(7s):516–520.
Python Software Foundation (2025). Python: Programming
language and community resources. Avaliable: https:
//www.python.org/. Accessed: 2025-03-07.
React (2025). React: The library for web and native user
interfaces. Avaliable: https://react.dev/. Accessed:
2025-03-07.
Resnick, M., Maloney, J., Monroy-Hern
´
andez, A., Rusk,
N., Eastmond, E., Brennan, K., Millner, A., Rosen-
baum, E., Silver, J., Silverman, B., and Kafai, Y.
(2009). Scratch: Programming for all. Communica-
tions of the ACM, 52(11):60–67.
ROS Documentation (2025). Using turtlesim, ros2, and
rqt: Beginner tutorial. Avaliable: https://docs.
ros.org/en/jazzy/Tutorials/Beginner-CLI-Tools/
ROSBLOCKS: A Visual Programming Interface for ROS2 Robots
273

Introducing-Turtlesim/Introducing-Turtlesim.html.
Accessed: 2025-03-19.
The Construct (2025). Robot ignite academy: Online ros
courses. Avaliable: https://www.robotigniteacademy.
com/en/. Accessed: 2025-06-04.
Zick, L. A., Martinelli, D., Schneider de Oliveira, A., and
Cremer Kalempa, V. (2024). Teleoperation system for
multiple robots with intuitive hand recognition inter-
face. Scientific Reports, 14(1):1–11.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
274
