
Verifying Positivity of Piecewise Quadratic Lyapunov Functions*
Sigurdur Hafstein
a
and Eggert Hafsteinsson
University of Iceland, Faculty of Physical Sciences, Dunhagi 5, 107 Reykjavik, Iceland
Keywords:
Lyapunov Function, Piecewise Quadratic, Numerical Algorithm, Switched Systems, Cone-Wise Linear
Systems.
Abstract:
Continuous, piecewise quadratic (CPQ) Lyapunov functions are frequently used to assert stability for switched,
cone-wise linear systems. It is advantageous to construct such Lyapunov functions in two steps: first a function
is parameterized that is decreasing along all system trajectories, then it is verified whether this function is
positive definite. Usually these steps have been performed using linear matrix inequalities (LMIs), but recently
a linear programming (LP) approach for the first step has been suggested. In this paper we present a new
algorithm to verify the positivity of CPQ Lyapunov function candidates, parameterized either with LMIs or
LP. Further, we prove that the algorithm is non-conservative and will always be able to either assert positive
definiteness of a CPQ Lyapunov function candidate or find a point where it is negative.
1 INTRODUCTION
Switched, cone-wise linear systems have received
much interest in the control engineering community,
in particular since the seminal works of Mikael Jo-
hansson and Anders Rantzer (Johansson and Rantzer,
1998; Johansson, 1999). For these systems, the sta-
bility of the origin has been, inter alia, asserted by us-
ing continuous and piecewise affine (CPA) Lyapunov
functions, see e.g. (Andersen et al., 2023b; Ander-
sen et al., 2023a), or by using continuous and piece-
wise quadratic (CPQ) Lyapunov functions as in the
works of Johansson and Rantzer. Such systems have,
for example, been successfully used to study hybrid
integrator-gain systems (HIGS), see e.g. (van den Ei-
jnden et al., 2020; Deenen et al., 2021; van den Eijn-
den et al., 2022).
Recently an algorithm different to the usual lin-
ear matrix inequality (LMI) approach for the com-
putation of CPQ Lyapunov functions was presented,
where linear programming (LP) is used instead of
semi-definite optimization to parameterize CPQ Lya-
punov functions, see (Palacios Roman et al., 2024;
Andersen et al., 2024). Just as in the LMI approach,
it is advantageous to construct the CPQ Lyapunov
function in two steps; see Section 4.8 in (Johansson,
1999). First, a CPQ real-valued function V from the
a
https://orcid.org/0000-0003-0073-2765
∗
This work was supported in part by the Icelandic Re-
search Fund under Grant 228725-051.
state-space is parameterized, that is decreasing along
all system trajectories; this function is referred to as
Lyapunov function candidate. In a second step it is
verified whether V is positive definite or not. If V
is positive definite, i.e. V (0
0
0) = 0 and V(x) > 0 for
all x ∈ R
n
\ {0
0
0}, then V is a Lyapunov function for
the system and the origin is asymptotically stable. If
there exists an x ∈ R
n
\ {0
0
0} such that V (x) < 0, then
the origin is unstable. Both of these properties follow
from the fact that V is decreasing along all system tra-
jectories. In more detail: If V is positive definite, then
all solution trajectories must approach the minimum
at the origin. If there is an x ∈ R
n
\ {0
0
0} such that
V (x) < 0, then V (ax) < 0 for all a > 0, and solutions
starting at a point ax must approach infinity, where the
values of V are lower. It follows that it is impossible
that V takes on negative values if the origin is asymp-
totically stable. Further, the third possibility, i.e. that
V (x) ≥ 0 for all x ∈ R
n
and there is an y ∈ R
n
differ-
ent to the origin such that V (y) = 0, is impossible; see
Theorem 1.
Hence, dividing the algorithm into two steps is
not only computationally more efficient, but asymp-
totic stability of the origin will be asserted if it is
asymptotically stable, and as an added bonus, insta-
bility can be asserted for instable systems. The main
contribution of this paper is the presentation of a new
algorithm to verify the positivity of CPQ Lyapunov
function candidates parameterized with the method
from (Palacios Roman et al., 2024; Andersen et al.,
Hafstein, S. and Hafsteinsson, E.
Verifying Positivity of Piecewise Quadratic Lyapunov Functions.
DOI: 10.5220/0013713600003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 435-444
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
435

2024) or by LMIs. We prove in Theorem 11 that this
new method is non-conservative. Note that our new
algorithm is computationally more efficient than the
LMI approach from (Johansson, 1999), discussed in
Section 2.4, which additionally introduces some con-
servatism; see e.g. (Scherer, 2006) for various LMI
relaxation methods used in control theory. Further,
our approach can be used to verify positivity for more
general functions than piecewise quadratic. Compar-
ison with more recent LMI approaches presented in
(Kruszewski et al., 2009; Sala and Arino, 2007; Gon-
zaleza et al., 2017), which are sufficient and asymp-
totically necessary, will be the subject of a subsequent
publication.
2 CPQ LYAPUNOV FUNCTIONS
In this paper we consider switched, cone-wise linear
systems and CPQ Lyapunov functions that are posi-
tively homogeneous of order two. For this it is ad-
vantageous to first consider triangulations of a neigh-
borhood of the origin of a specific type and then ex-
tend these triangulations to a conical subdivision of
the whole state-space R
n
. Hence, we first define trian-
gulations suitable for our application, before we dis-
cuss conical subdivisions, our class of systems, and
CPQ Lyapunov functions.
2.1 Triangulations
A triangulation T of a set D
T
⊂ R
n
is a set of
n-simplices T := {S
ν
: ν ∈ I}, such that D
T
=
S
ν∈I
S
ν
; I is an index set. Recall that an n-simplex
S
ν
is defined as
S
ν
:=co{x
ν
0
,x
ν
1
,...,x
ν
n
}
=
(
x ∈ R
n
: x =
n
∑
i=0
λ
i
x
ν
i
,λ
i
≥ 0,
n
∑
i=0
λ
i
= 1
)
,
where the vectors x
ν
i
∈ R
n
are called the vertices
of S
ν
and are assumed to be affinely independent,
i.e. the vectors x
ν
i
− x
ν
0
, i = 1,2,...,n are linearly in-
dependent. For our purposes, we additionally require
that the triangulation T is shape-regular, i.e., every
two different simplices S
ν
,S
µ
∈ T either intersect in
a common lower-dimensional face or do not intersect
at all. This means that if S
ν
∩S
µ
̸=
/
0, then S
ν
∩S
µ
is
a k-simplex, 0 ≤ k < n, whose vertices are the vertices
common to S
ν
and S
µ
.
For our specific application we further demand
that x
ν
0
= 0
0
0 for all S
ν
∈ T and that D
T
is a neigh-
borhood of the origin 0
0
0 ∈ R
n
.
An efficient implementation of a triangulation
that satisfies these requirements is the triangular fan
T
std
K,fan
, K ∈ N := {1,2,...}, discussed in (Hafstein,
2019) where a formula for the vertices x
ν
i
is given.
In the following we write T
K
for T
std
K,fan
. The vertex
set of the triangulation T
K
, i.e. the set of all vertices
of all simplices, is
{0
0
0} ∪
{
z ∈ Z
n
:
∥
z
∥
∞
= K
}
,
where the scaling parameter K ∈ N determines the
fineness of the triangulation around zero. The num-
ber of simplices in the triangulation T
K
is given by
the formula 2
n
· K
n−1
· n!.
For computations it is usually better to map the
vertices T
K
with the mapping F : R
n
→ R
n
, F(0
0
0) = 0
0
0
and F(x) =
∥x∥
∞
∥x∥
2
x. The resulting triangulation is de-
noted T
F
K
and the set D
T
F
K
is approximately spheri-
cally symmetric, see Figures 1 and 2.
For proving theorems, it is often convenient to
scale down all the vertices of T
K
by the factor K
−1
.
The resulting triangulation is denoted K
−1
T
K
and all
its non-zero vertices are at the boundary of the unit
hypercube [−1,1]
n
and for any two different non-
zero vertices x,y of a simplex S
ν
∈ K
−1
T
K
we have
∥x −y∥
∞
= K
−1
.
For a fixed K ∈ N, all the triangulations T
K
, T
F
K
,
and K
−1
T
K
give the same conical subdivision of the
state-space R
n
discussed in the next section.
2.2 Conical Subdivision of the
State-Space
Given a triangulation T as in the last section, one
can define a corresponding conical subdivision of the
state-space through
C
ν
:= {x ∈ R
n
: cx ∈ S
ν
for some c > 0}
for every S
ν
∈ T . Since S
ν
= co{x
ν
0
,x
ν
1
,...,x
ν
n
} it is
easy to see that
C
ν
= cone{x
ν
1
,x
ν
2
,...,x
ν
n
}
:
=
(
n
∑
i=1
λ
i
x
ν
i
: λ
i
≥ 0
)
.
Hence, every x ∈ C
ν
has a unique set of numbers
λ
1
,λ
2
,...,λ
n
≥ 0 such that x =
∑
n
i=1
λ
i
x
ν
i
because the
x
ν
i
are linearly independent; recall that x
ν
0
= 0
0
0. Since
T is a triangulation of a neighborhood of the origin
D
T
, the set-theoretic union of all C
ν
is equal to R
n
.
2.3 Switched Linear Systems and CPQ
Lyapunov Functions
We consider systems of the form
˙
x(t) = A
s(t)
x(t), A
j
∈ R
n×n
for j ∈ {1,2,...,M},
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
436
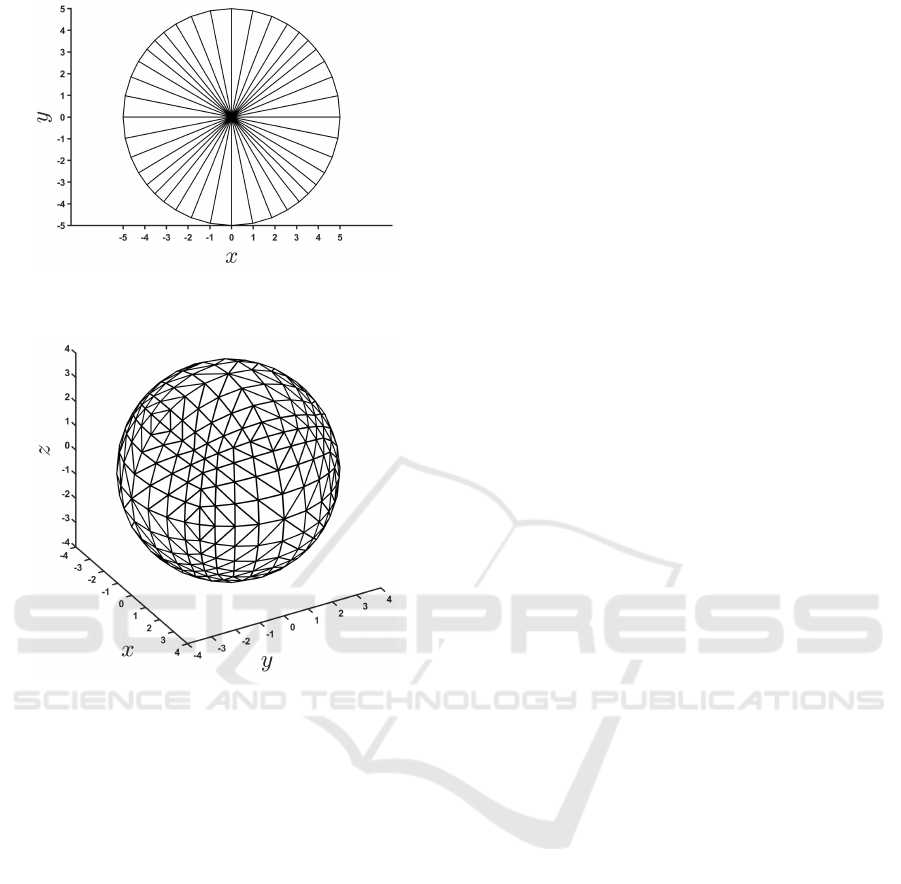
Figure 1: The triangulation T
F
K
in two dimensions and with
K = 5.
Figure 2: The triangulation T
F
K
in three dimensions and
with K = 4. Note that every simplex in T
F
K
is a tetrahedron
with zero as a vertex, together with three other vertexes at
the boundary of a sphere centered at the origin and with ra-
dius K.
where s : [0,∞) → {1,2,...,M}, M ∈ N, is a
right-continuous, piecewise constant function, called
switching signal, with a only a finite number of dis-
continuity points, called switching times, on any fi-
nite time interval. The switching signal can either
be arbitrary, in which case the systems is said to be
arbitrary switched, or one can introduce restrictions
in the form σ(t) = j only if x(t) ∈ F
j
, where the
F
1
,F
2
,...,F
M
⊂ R
n
are closed simplicial cones with
the apex at the origin, similar to the C
ν
s above, ful-
filling that the
S
M
j=1
F
j
= R
n
and the intersection of
the interiors F
◦
j
and F
◦
k
of two different cones F
j
and
F
k
is empty. In the latter case the system is said to
have state-dependent switching; see (Palacios Roman
et al., 2024) for more details.
The solutions to arbitrary switched systems
are understood in the sense of Carathéodory, see
e.g. (Walter, 1998), and the solutions to systems with
state-dependent switching are understood in the sense
of Filippov, see (Filippov, 1988) or e.g. (Camlibel and
Pang, 2006) for cone-wise linear systems, which takes
care of sliding modes. For both arbitrary switched
systems and systems with state-dependent switching,
the origin is said to be globally uniformly exponen-
tially stable (GUES) if there exist constants c ≥ 1,
λ > 0 such that all solutions fulfill
∥x(t)∥
2
≤ ce
−λt
∥x(0)∥
2
for all t ≥ 0.
In both cases the GUES of the origin can be as-
serted with the existence of a CPQ Lyapunov function
fulfilling: Let {C
ν
}
ν∈I
be a conical subdivision of the
state-space as in Section 2.2 and assume V : R
n
→ R
is a continuous function such that for, w.l.o.g. sym-
metric, matrices P
ν
∈ R
n×n
we have
V (x) = x
T
P
ν
x if x ∈ C
ν
. (1)
Assume that the matrices P
ν
∈ R
n×n
fulfill for
some constants c
1
,c
2
,c
3
> 0, that for all ν ∈ I and
all j ∈ {1,2,...,M} we have
c
1
∥x∥
2
2
≤ x
T
P
ν
x ≤ c
2
∥x∥
2
2
, ∀x ∈ C
ν
, (2)
x
T
(A
T
j
P
ν
+ P
ν
A
j
)x ≤ −c
2
∥x∥
2
2
, ∀x ∈ C
ν
∩ F
j
, (3)
where in (3) we set F
j
:= R
n
for all j in the case of
arbitrary switched systems.
We emphasize: if the conditions (2) and (3) are
fulfilled for the arbitrary switched system or the sys-
tem with state-dependent switching, the function V is
called a CPQ Lyapunov function for the system and
the origin is GUES; see e.g. Theorems 3 and 5 in
(Palacios Roman et al., 2024).
2.4 Computing CPQ Lyapunov
Functions
Both the LMI method from (Johansson and Rantzer,
1998; Johansson, 1999) and the LP method from
(Palacios Roman et al., 2024; Andersen et al., 2024)
parameterize a CPQ Lyapunov function candidate of
the form (1) fulfilling the conditions (3). The condi-
tions (2) are then verified a posteriori for the candidate
using the LMI:
For every ν ∈ I find a symmetric matrix U
ν
∈ R
n×n
with entries [U
ν
]
i j
≥ 0 such that
P
ν
− (X
−1
ν
)
T
U
ν
X
−1
ν
⪰ 0, (4)
where ⪰ 0 means that the matrix on the left-hand-side
is symmetric and positive definite and
X
ν
:
=
x
ν
1
x
ν
2
... x
ν
n
∈ R
n×n
has the non-zero vertices of S
ν
as its columns.
Since for every x ∈ C
ν
there are unique λ
λ
λ =
Verifying Positivity of Piecewise Quadratic Lyapunov Functions
437

(λ
1
,λ
2
,...,λ
n
)
T
, λ
i
≥ 0, such that x =
∑
n
i=1
λ
i
x
ν
i
, the
condition (4) implies for every such x ∈ C
ν
that
0 ≤ x
T
(P
ν
− (X
−1
ν
)
T
U
ν
X
−1
ν
)x (5)
= x
T
P
ν
x −λ
λ
λ
T
Uλ
λ
λ
≤ x
T
P
ν
x.
The fact that V fulfills the constraints 2 now easily fol-
lows from the fact that V is continuous, homogeneous
of order two, and that V (x) = 0 for x ̸= 0
0
0 is impossi-
ble if V (x) ≥ 0 for all x ∈ R
n
by the next theorem; see
also Section 3.2.
Theorem 1. Assume V is of the form (1) and fulfills
the conditions (3). If V (x) ≥ 0 for all x ̸= 0
0
0, then
V (x) > 0 for all x ̸= 0
0
0.
Proof. Let V fulfill the assumptions of the theorem
and assume V(ξ
ξ
ξ) = 0, ξ
ξ
ξ ̸= 0
0
0, and consider a solu-
tion x(t) starting at x(0) = ξ
ξ
ξ for an arbitrary switched
system. Let h > 0 be so small that x(t) ̸= 0
0
0 for all
0 ≤ t ≤ h, which is possible because x(t) is con-
tinuous, and so small that no switching occurs on
the interval [0,h]. Then for appropriate ν ∈ I and
j ∈ {1,2,...,M} we have
V (x(h)) = V (x(h)) −V (x(0)) =
Z
h
0
d
dt
V (x(t))dt
=
Z
h
0
x(t)
T
(A
T
j
P
ν
+ P
ν
A
j
)x(t)dt
≤ −c
3
Z
h
0
∥x(t)∥
2
2
dt < 0 (6)
which contradicts V (x) ≥ 0 for all x ̸= 0
0
0.
For systems with state-dependent switching this
follows similarly, but by the Fundamental Theorem of
Calculus for Lebesgue Integrals, see e.g. Chapter III,
Section 10 in (Walter, 1998). For Filippov solutions
we have
˙
x(t) =
M
∑
j=1
λ
j
(t)A
j
x(t),
M
∑
j=1
λ
j
(t) = 1, a.e.,
for some non-negative functions λ
j
and since a.e.
d
dt
V (x(t)) =
˙
x(t)P
ν
x(t) + x(t)
T
P
ν
˙
x(t)
=
M
∑
j=1
λ
j
(t)x(t)
T
(A
T
j
P
ν
+ P
ν
A
j
)x(t)
≤ −c
3
∥x(t)∥
2
2
we can conclude, similarly as in (6), that V (x(t)) < 0
for small enough t > 0, in contradiction to V (x) ≥ 0
for all x ̸= 0
0
0.
Although the LMIs conditions (4) are sufficient to
assert the conditions (2) for a CPQ Lyapunov func-
tion, they are not necessary. In the following section
we propose a different method that is both sufficient
and necessary, and, as an added bonus, computation-
ally less demanding.
Remark 2. Note that the condition x
T
P
ν
x ≥ 0 for all
x ∈ C
ν
in (5) is nothing else than the condition of
copositivity of the matrix X
T
ν
P
ν
X
ν
, i.e.
λ
λ
λ
T
X
T
ν
P
ν
X
ν
λ
λ
λ ≥ 0 for all λ
λ
λ ∈ R
n
+
:= [0,∞)
n
.
This problem of deciding whether a matrix is coposi-
tive is known to be co-NP-complete; for more details
on copositive matrices see e.g. (Ikramov and Savel-
eva, 2000).
3 VERIFICATION OF
POSITIVITY
We start by discussing in general how the positivity of
a function defined on a simplex can be verified. The
following lemma, proved as Lemma 4.16 in (Marinós-
son, 2002) using Taylor-expansions, is fundamental
for our approach:
Lemma 3. On an m-simplex S :=
co{x
0
,x
1
,...,x
m
} ⊂ R
n
, m ≤ n, we have for a
function g ∈ C
2
(U), U ⊂ R
n
open neighbor-
hood of S, and every x =
∑
m
i=0
λ
i
x
i
∈ S and any
d ∈ {0,1,. . . , n}, that
g(
m
∑
i=0
λ
i
x
i
) −
m
∑
i=0
λ
i
g(x
i
)
≤
m
∑
i=0
λ
i
E
i
, (7)
where
E
i
≥
n
∑
r,s=1
B
rs
2
|[x
i
− x
d
]
r
|(|[x − x
d
]
s
| + |[x
i
− x
d
]
s
|),(8)
[y]
i
is the ith component of the vector y and
B
rs
:= max
x∈S
∂
2
g
∂x
r
∂x
s
(x)
.
□
This lemma can be used to rigorously verify com-
putationally whether g(x) ≥ 0 on an m-simplex S :=
co{x
0
,x
1
,...,x
m
} ⊂ R
n
, m ≤ n.
Test for Positivity 4. The test consist of the three fol-
lowing steps:
1. If g(x
i
) < 0 for some i ∈ {0, 1,...,m} then clearly
g(x) ≥ 0 for every x ∈ S does not hold true.
2. If
g(x
i
) − E
i
≥ 0 for i = 0,1,...,m, (9)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
438

then, because
g(x) = g(x) −
m
∑
i=0
λ
i
g(x
i
) +
m
∑
i=0
λ
i
g(x
i
)
≥
m
∑
i=0
λ
i
g(x
i
) − |g(x) −
m
∑
i=0
λ
i
g(x
i
)|
≥
m
∑
i=0
λ
i
(g(x
i
) − E
i
) ≥ 0,
we have g(x) ≥ 0 for every x ∈ S.
3. If neither of the criteria above hold true, i.e. if
g(x
i
) ≥ 0 for all i = 0,1,...,m but there is an i ∈
{0,1,...,m} such that g(x
i
)−E
i
< 0, then the test
is inconclusive.
In the inconclusive case one can subdivide the
simplex S into smaller m-simplices and verify
whether g(x) ≥ 0 on these smaller simplices or not
with the same method. If we can guaranty that the
bounds E
i
s approach zero as the simplices get smaller
and smaller, this will indeed give us an algorithm that
asserts computationally that g(x) ≥ 0 for all x ∈ S
if min
x∈S
g(x) > 0. Further, if the vertices of the
ever further subdivided simplices build a dense set in
S, the method will also deliver a point x ∈ S with
g(x) < 0 if min
x∈S
g(x) < 0. Both these conditions
are easy to guaranty if the diameter of the simplices
converges to zero as we keep on subdividing the sim-
plices; we prove this in Corollary 8 and Lemma 10.
3.1 Some Notes on the Bounds E
i
For the term |[x − x
d
]
s
| in (8) we can use
max
j∈{0,1,...,m}
|[x
j
− x
d
]
s
| as an upper bound, which
is independent of x, because x =
∑
m
j=0
λ
j
x
j
and
"
m
∑
j=0
λ
j
x
j
− x
d
#
s
=
m
∑
j=0
λ
j
[x
j
− x
d
]
s
(10)
≤
m
∑
j=0
λ
j
[x
j
− x
d
]
s
≤ max
j∈{0,1,...,m}
|[x
j
− x
d
]
s
|.
Hence, max
j∈{0,1,...,m}
|[x
j
− x
d
]
s
| can be substi-
tuted for |[x − x
d
]
s
| in the formula on the right-hand-
side of (8).
A less conservative bound for right-hand-side of
(8), shown analogously, is given by
n
∑
r,s=1
B
rs
2
|[x
i
− x
d
]
r
|(|[x − x
d
]
s
| + |[x
i
− x
d
]
s
|) (11)
≤ max
j∈{0,1,...,m}
n
∑
r,s=1
B
rs
2
|[x
i
− x
d
]
r
|×
(|[x
j
− x
d
]
s
| + |[x
i
− x
d
]
s
|).
However, using these tighter bound is computa-
tionally somewhat more involved.
Further, one can choose the d ∈ {0, 1,...,m} in
formula (8) freely, or try different ones and select the
best according to some criteria, but note that one must
use the same d for all the E
i
s for (7) to hold true.
A rather straight-forward a priori choice is to select
d such that
g(x
d
) ≤ g(x
i
) for i = 0,1,...,m,
because we can set E
d
= 0 and this automatically de-
livers that (9) holds true for i = d if g(x
d
) ≥ 0.
3.2 Positivity of CPQ Functions
For a CPQ Lyapunov functions candidate V as in
(1), that fulfills the conditions (3), we want to assert
whether the conditions (2) hold true or not. The con-
ditions (2) hold true, if for every ν ∈ I we have that
V (x) = x
T
P
ν
x > 0 for every x ∈ C
ν
\ {0
0
0}; just note
that since V is continuous and positively homogenous
of order two, i.e. V (sx) = s
2
V (x) for every s > 0, we
have with
0 < c
1
:= min
∥x∥
2
=1
V (x) and c
2
:= max
∥x∥
2
=1
V (x)
that
c
1
∥x∥
2
2
≤ V (x) ≤ c
2
∥x∥
2
2
.
To verify that V (x) > 0 for all x ∈ C
ν
\ {0
0
0}, it
suffices to verify that V (x) ≥ 0 for all x ∈ S
∗
ν
:=
co{x
ν
1
,x
ν
2
,. . . ,x
ν
n
}, as for every x ∈ C
ν
there is a
unique set of numbers λ
i
≥ 0 such that x =
∑
n
i=1
λ
i
x
ν
i
and for x ̸= 0
0
0 we have λ :=
∑
n
i=1
λ
i
> 0. Hence,
x := x/λ ∈ S
∗
ν
and V (x) = λ
2
V (x) ≥ 0; by Theorem 1
this implies that indeed V (x) > 0. Note that S
∗
ν
is the
face of S
ν
obtained by removing the vertex x
ν
0
= 0
0
0.
One might be tempted to think that to verify the
positivity of V on C
ν
\ {0
0
0} it might be enough to
check the positivity at the non-zero vertices of S
ν
,
or maybe all vertices and all midpoints between ver-
tices (x
ν
i
+ x
ν
j
)/2, i, j = 0, 1,...,n, because the values
of V (x) = x
T
P
ν
x at these points completely determine
V , see e.g. Theorem 2.8 in (Giesl et al., 2025). How-
ever, as the next remark shows, this is not the case.
Remark 5. Consider the quadratic function
P(x,y) =
y −
3
4
x
2
−
1
128
xy
on the triangle/simplex co{(0,0)
T
,(1, 0)
T
,(1, 1)
T
}.
At the vertices we have P(0,0) = 0, P(0,1) = 9/16 >
0, and P(1,1) = 7/128 > 0 and at the midpoints be-
tween the vertices we have P(1/2,0) = 9/64 > 0,
P(1/2,1/2) = 7/512 > 0, and P(1,1/2) = 15/256 >
Verifying Positivity of Piecewise Quadratic Lyapunov Functions
439

0. However, by construction P(x, 3x/4) = −3x/512 <
0 for all 0 < x ≤ 1.
Similarly, one can also check that on the
triangle/simplex co{(1/2,0)
T
,(1, 0)
T
,(1, 1)
T
}
the function P is strictly larger than zero
at all vertices and all midpoints between
vertices, as P(3/4,0) = 81/256 > 0 and
P(3/4,1/2) = 1/1024 > 0, although P is not
positive over the triangle/simplex.
□
We will use Lemma 3 to verify the positivity of V
on S
∗
ν
. The constants B
rs
in the E
i
s are easy to get:
B
rs
=
∂
2
∂x
r
∂x
s
x
T
P
ν
x
= 2|[P
ν
]
rs
|.
For the rest of the terms in E
i
we could, for exam-
ple, use (10) or (11).
Another strategy could be use less tight bounds
and use formulas for the E
i
that can be computed
more quickly. For example, with the triangulation
K
−1
T
K
of [−1, 1]
n
from Section 2.1, we have for ev-
ery simplex S
ν
and the face S
∗
ν
at the boundary of
[−1,1]
n
that ∥x
ν
i
∥
∞
= 1 and ∥x
ν
i
− x
ν
d
∥
∞
≤ 1/K for all
i = 1,2,. . . ,n, and ∥x − x
d
∥
∞
≤ 1/K and we can set
E
i
=
2
K
2
n
∑
r,s=1
|[P
ν
]
rs
|.
Hence, if
(x
ν
i
)
T
P
ν
x
ν
i
−
2
K
2
n
∑
r,s=1
|[P
ν
]
rs
| (12)
=
n
∑
r,s=1
[x
ν
i
]
r
[x
ν
i
]
s
[P
ν
]
rs
−
2
K
2
|[P
ν
]
rs
|
≥ 0
for i = 1,2, . ..,n, then V(x) = x
T
P
ν
x > 0 for all x ∈
C
ν
\ {0
0
0}. Note that we can actually skip one i in the
test (12), as we can choose our d with E
d
= 0 freely.
Hence, for x
ν
d
such that 0 < V(x
ν
d
) ≤ V (x
ν
i
) for all
i = 1, 2,...,n we don’t need (12) to hold true for i = d.
As we discussed before, if the test is inconclusive,
i.e.
V (x
ν
i
) > 0 for all i = 1, 2, ...,n but,
V (x
ν
j
) − E
j
< 0 for some j ∈ {1, 2,...,n} ,
then we can subdivide the simplex S
∗
ν
:=
co{x
ν
1
,x
ν
2
,. . . ,x
ν
n
} into smaller simplices, such
that the E
i
s are smaller, and try again. This can
then be repeated for those sub-simplices where the
test is inconclusive. Before we prove that such an
algorithm always succeeds in Theorem 11, be discuss
the subdivision of simplices in the next section.
4 SUBDIVISION OF SIMPLICES
To describe the subdivision we use, it is advanta-
geous to use a little different notations. For a per-
mutation σ ∈ S
m
, i.e. a one-to-one σ: {1,2, . . .,m} →
{1,2, . . .,m}, and a number a > 0, define the m-
simplex
S
a
σ
:= a · co{x
σ
0
,x
σ
1
,. . . ,x
σ
m
} ⊂ R
m
,
where, for i = 0,1,. . . ,m,
x
σ
i
:=
i
∑
j=1
e
σ( j)
.
Here e
i
denotes the standard ith unit vector in
R
m
and recall that the empty sum is defined as zero,
i.e.
∑
0
j=1
e
σ( j)
= 0
0
0 ∈ R
m
Note that for a vector x ∈ S
a
σ
we have
x = a
m
∑
i=0
λ
i
x
σ
i
= a
m
∑
i=0
λ
i
i
∑
j=1
e
σ( j)
= a
m
∑
i=1
m
∑
j=i
λ
j
!
e
σ(i)
and because λ
j
≥ 0 for all j this means that the com-
ponents of x = (x
1
,x
2
,. . . ,x
m
)
T
, x
σ(i)
=
∑
m
j=i
λ
j
, fulfill
a ≥ x
σ(1)
≥ x
σ(2)
≥ .. . ≥ x
σ(m)
≥ 0. (13)
Indeed, it is not difficult to see that
λ
m
:=
1
a
x
σ(m)
,
λ
m−1
:=
1
a
x
σ(m−1)
− x
σ(m)
λ
m−2
:=
1
a
x
σ(m−2)
− x
σ(m−1)
.
.
.
λ
1
:=
1
a
x
σ(1)
− x
σ(2)
λ
0
=
1
a
a −x
σ(1)
and that the simplex S
a
σ
is the set of those vectors
x ∈ R
m
that fulfill (13).
Now consider the simplex S
1
σ
for a permutation
σ ∈ S
m
and a vector y = (y
1
,y
2
,. . . ,y
m
)
T
with y
i
∈
{0,1} for i = 1,2,..., m. We want to find a permuta-
tion α ∈ S
m
such that
y +S
1
σ
⊂ S
2
α
. (14)
To this end consider the matrix
σ(1) σ(2) · · · σ(m)
y
σ(1)
y
σ(2)
· y
σ(m)
(15)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
440

and let
A
1
:= {i ∈ {1,2,. . . , m}: y
i
= 1} = {i
1
,i
2
,. . . ,i
k
},
A
0
:= {i ∈ {1,2,. . . , m}: y
i
= 0} = {i
k+1
,i
k+2
,. . . ,i
m
},
where i
1
< i
2
< .. . < i
k
and i
k+1
< i
k+2
< .. . < i
m
.
Now rearrange the columns in the matrix in (15)
such that
σ(i
1
) ··· σ(i
k
) σ(i
k+1
) ··· σ(i
m
)
y
σ(i
1
)
· y
σ(i
k
)
y
σ(i
k+1
)
·· · y
σ(i
m
)
=
σ(i
1
) ··· σ(i
k
) σ(i
k+1
) ··· σ(i
m
)
1 ·· · 1 0 · · · 0
Now define α ∈ S
m
through
α( j) = σ(i
j
), j = 1, 2,..., m. (16)
Since α is the composition of the two permuta-
tions σ and j 7→ i
j
in S
m
, it is clear that α ∈ S
m
. For
z ∈ y + S
1
σ
we will show that
2 ≥ z
α(1)
≥ z
α(2)
≥ .. . ≥ z
α(m)
≥ 0,
i.e. that z ∈ S
2
α
.
Now for z = y + x, x ∈ S
1
σ
, we have
z
α(1)
= y
α(1)
+ x
α(1)
= y
σ(i
1
)
+ x
σ(i
1
)
≥ y
σ(i
2
)
+ x
σ(i
2
)
= z
α(2)
,
because if k = 1, i.e. |A
1
| = 1, we have y
σ(i
1
)
= 1,
y
σ(i
2
)
= 0, and x
σ(i
1
)
,x
σ(i
2
)
∈ [0,1], so
y
σ(i
1
)
+ x
σ(i
1
)
≥ 1 ≥ y
σ(i
2
)
+ x
σ(i
2
)
,
and if k > 1, then y
σ(i
1
)
= y
σ(i
2
)
= 1 and x
σ(i
1
)
≥ x
σ(i
2
)
and again
y
σ(i
1
)
+ x
σ(i
1
)
≥ y
σ(i
2
)
+ x
σ(i
2
)
.
This argument can be repeated to show that
z
α( j)
= y
α( j)
+ x
α( j)
= y
σ(i
j
)
+ x
σ(i
j
)
(17)
≥ y
σ(i
j+1
)
+ x
σ(i
j+1
)
= z
α( j+1)
for j = 1, 2, ...,k. For j = k + 1, k + 2, . . .,m the in-
equality (17) is equally clear by the construction of α,
because y
σ(i
j
)
= y
σ(i
j+1
)
= 0 and x
σ(i
j
)
≥ x
σ(i
j+1
)
.
This gives an algorithm to subdivide the simplices
in S
2
α
⊂ [0, 2]
m
, α ∈ S
m
, into 2
m
simplices each, that
are congruent to simplices in S
1
σ
⊂ [0,1]
m
, σ ∈ S
m
.
However, every simplex S
a
σ
can be mapped one-to-
one to a general m-simplex
S := co{y
0
,y
1
,. . . ,y
m
} ⊂ R
n
, n ≥ m,
i.e. the vectors y
0
,y
1
,. . . ,y
m
∈ R
n
are affinely inde-
pendent, with the mapping
S(x) = Fx + y
0
, (18)
where the matrix F ∈ R
n×m
is defined by fixing its
σ(i)th column as F
σ(i)
=
1
a
[y
i
− y
i−1
], i = 1,2,..., m,
to see this just note that
S (ax
σ
i
) = aF
i
∑
j=1
e
σ( j)
+ y
0
=
i
∑
j=1
F
σ( j)
+ y
0
=
i
∑
j=1
[y
j
− y
j−1
] + y
0
= y
i
,
from which
S
a
m
∑
i=0
λ
i
x
σ
i
!
=
m
∑
i=0
λ
i
(aFx
σ
i
+ y
0
) =
m
∑
i=0
λ
i
y
i
for
∑
m
i=0
λ
i
= 1 follows.
Hence, to subdivide S into 2
m
simplices, we can
just subdivide
S
2
id
:= {x ∈ R
m
: 2 ≥ x
1
≥ x
2
≥ .. . ≥ x
m
≥ 0}
using the results above and then map the subdivision.
This is indeed very simple. From (16) with α = id it is
clear that a necessary and sufficient condition is that
σ(i
j
) = j for j = 1,2,...,m. Further, y ∈ R
m
in (14)
is given by y =
∑
k
j=1
e
σ(i
j
)
=
∑
k
j=1
e
j
=: 1
k
.
This gives us a simple algorithm. For every z ∈
{0,1}
m
do the following: Let i
1
< i
2
< ... < i
k
be
the indices of z such that z
i
j
= 1 and i
k+1
< i
k+2
<
.. . < i
m
be the indices where z
i
j
= 0. Set σ(i
j
) = j
for j = 1,2, . ..,m, then 1
k
+ S
1
σ
⊂ S
2
id
. Since this
gives us 2
m
different simplices 1
k
+ S
1
σ
, these are ex-
actly the simplices that subdivide S
2
id
. For a graphical
presentation of this approach see Figures 3 and 4
5 THE ALGORITHM
Using the results we have developed in the last sec-
tion, we can now state an algorithm that combines
Test for Positivity 4 with subdivision of simplices.
Test for Positivity 6. Assume the function g: S → R,
S := co{x
0
,x
1
,. . . ,x
m
} ⊂ R
n
an m-simplex, m ≤ n,
fulfills the assumptions of Lemma 3. Then execute:
1. Perform Test for Positivity 4 on S.
2. If the test is inconclusive, then subdivide S into
2
m
sub-simplices,
S
k
:= co{x
k
0
,x
k
1
,. . . ,x
k
m
}, k = 1,2, 3, ...,2
m
,
as described in Section 4 and go back to Step 1
with S = S
k
for k = 1,2,3,..., 2
m
.
3. If Step 2 finishes without having found a vertex
y ∈ R
n
such that g(y) < 0 in Step 1, then g(x) ≥ 0
for all x in the original simplex S.
Verifying Positivity of Piecewise Quadratic Lyapunov Functions
441
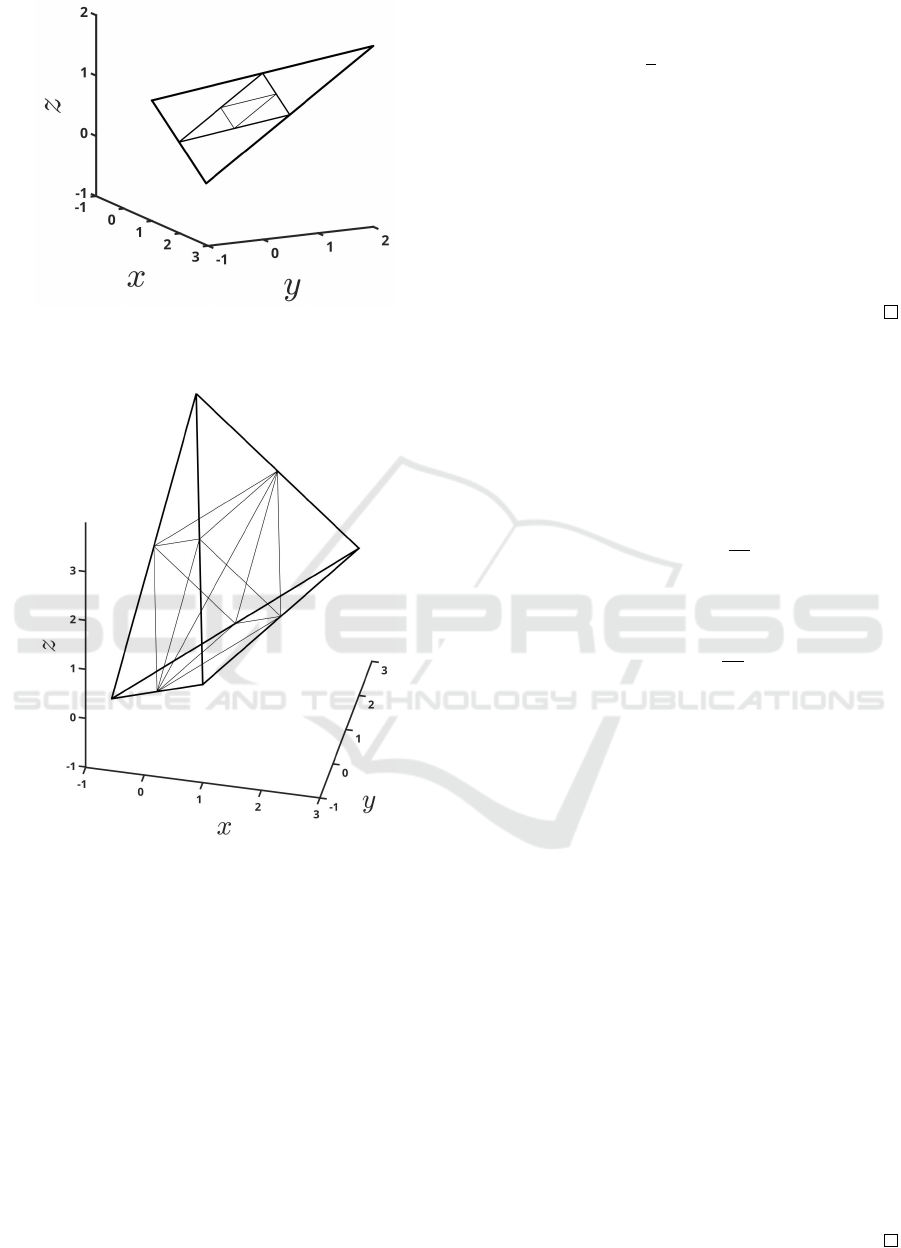
Figure 3: A triangle (2-simplex) in 3 dimensions subdivided
into 2
2
= 4 triangles, of which one is further subdivided into
2
2
= 4 triangles.
Figure 4: A tetrahedron (3-simplex) in 3 dimensions subdi-
vided into 2
3
= 8 tetrahedra.
Note that Test for Positivity 6 might end up in
an infinite loop if g is non-negative but zero at some
points in S. However, we will show that it always
gives a definite answer for CPQ Lyapunov function
candidates in the rest of this section.
Define the diameter of a simplex S =
co{x
0
,x
1
,. . . ,x
m
} ⊂ R
n
as
diam(S) := max
i, j=0,1,...,m
∥x
i
− x
j
∥
2
.
Lemma 7. Let S := co{x
0
,x
1
,. . . ,x
m
} ⊂ R
n
be an
m-simplex and S
k
, k = 1,2, 3, . ..,2
m
, be the simplices
S is subdivided into using the algorithm from Section
4. Let S(x) = Fx + x
0
be the mapping (18) that maps
the vertices of S
2
id
⊂ R
m
to the vertices of S. Then
diam(S
k
) ≤
1
2
max
y,z∈{0,2}
m
∥F(y − z)∥
2
(19)
for k = 1,2,3,..., 2
m
.
Proof. First note that all vertices of all simplices in
S
a
σ
, σ ∈ S
m
, are vectors in the set {0,a}
m
. Since
S(y) − S(z) = F(y − z) and S = F(S
2
id
) is subdi-
vided into simplices of the form F(1
k
+ S
1
σ
), σ ∈ S
m
,
which are congruent to the simplices in F(S
1
σ
), σ ∈
S
m
, which in turn are congruent to the simplices in
F(S
2
σ
), σ ∈ S
m
, scaled down by a factor 1/2, the es-
timate (19) follows.
This lemma has an obvious corollary; just set A :=
max
y,z∈{0,2}
m
∥F(y − z)∥
2
.
Corollary 8. Let S := co{x
0
,x
1
,. . . ,x
m
} ⊂ R
n
be an
m-simplex. Then there is a constant A > 0 such that
if S is K times iteratively subdivided into simplices
using the algorithm from Section 4, i.e. subdivided,
then the simplices in the subdivision are subdivided,
etc., then
diam(S
k
K
) ≤
A
2
K
for every simplex S
k
K
, k = 1,2,3,.. . , 2
mK
, in the Kth
iteration. In particular
|[x − y]
r
| ≤
A
2
K
for every two vectors in S
k
K
and r = 1,2, . ..,n.
Another obvious corollary, and useful for our pur-
poses, is the following.
Corollary 9. If g in Lemma 3 fulfills g(x) > 0 for all
x ∈ S and if the E
i
s from Lemma 3 are scaled down
in the obvious way in the iterations (jump from Step
2 to Step 1) in Test for Positivity 6, then the test will
deliver the results g(x) ≥ 0 for all x ∈ S in a finite
number of steps.
Proof. This is indeed obvious from what we have
shown. The only problem in the formulation is the
inequality (8), as one could successively chose more
and more conservative bounds E
i
in the iterations.
However, since the upper bounds B
rs
cannot become
larger when we go to smaller simplices, and the terms
|[x
i
− x
j
]
r
| can be scaled down by a factor of 1/2
in each iteration, this is unnecessary and makes no
sense. Hence, we can let the E
i
converge to zero
uniformly over the iterations and then, at the latest
in the iteration when all E
i
s are less than or equal
to min
x∈S
g(x) > 0, Test for Positivity 4 in Step 1
of Test for Positivity 6 delivers that g(x) ≥ 0 for all
x ∈ S.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
442

Not only will Test for Positivity 6 deliver an affir-
mative answer if g(x) > 0 for all x ∈ S, but if there
is a y ∈ S such that g(y) < 0, then the test will also
deliver the results that g(x) ≥ 0 for all x ∈ S is false,
in a finite number of steps.
Lemma 10. If for g in Lemma 3 there is a y ∈ S such
that g(y) < 0, then Test for Positivity 6 will deliver a
point y
∗
∈ S such that g(y
∗
) < 0 in a finite number of
steps.
Proof. Since g is continuous there is an open neigh-
borhood U ⊂ S of y such that g(x) < 0 for all x ∈ U,
and since S from (18) is continuous the set S
−1
(U) is
open in S
2
id
⊂ R
m
and there is an open ball B ⊂ S
2
id
where g ◦ S is negative. Now consider that the ver-
tices of S
2
id
are the set {0,2}
m
∩ S
2
id
, the set of all
vertices of all the simplices in the first subdivision of
S
2
id
is {0,1,2}
m
∩ S
2
id
, the set of all vertices of all
the simplices in the second iterative subdivision of
S
2
id
is {0,1/2, 1, 3/2, 2}
m
∩ S
2
id
, etc. Now, for a large
enough K ∈ N, there must exist an
x
∗
∈
0,
1
2
K
,
2
2
K
,. . . ,
2 ·2
K
− 1
2
K
,2
m
∩ B
and with y
∗
= S(x
∗
) we have 0 > (g ◦ S)(x
∗
) = g(y
∗
).
Assume V is a CPQ Lyapunov function candidate,
i.e. is of the form (1) and fulfills the conditions (3). In
Theorem 1 we showed that if V (x) ≥ 0 for all x ̸= 0
0
0,
then V (x) > 0 for all x ̸= 0
0
0. Hence, for every ν ∈ I,
either V (x) > 0 for all x ∈ C
ν
\ {0
0
0} or there exists a
y ∈ C
ν
such that V (y) < 0. Combining Corollary 9
and Lemma 10 with these results delivers:
Theorem 11. For a CPQ Lyapunov function candi-
date V of the form (1) that fulfills the conditions (3),
the Test for Positivity 6 is non-conservative when ver-
ifying the conditions (2) for a CPQ Lyapunov func-
tions. That is, the test will give an affirmative answer
in a finite number of steps, whether (2) holds true or
not.
6 CONCLUSIONS
For switched, cone-wise linear systems, either arbi-
trary switched or with state-dependent switching, we
presented an algorithm to verify the positive definite
conditions for CPQ Lyapunov function candidates pa-
rameterized using LMIs or LP. Further, we proved in
Theorem 11 that the algorithm is non-conservative,
in comparison to earlier approaches that do introduce
some conservatism. In a subsequent publication we
will describe an efficient implementation of our algo-
rithm for n-dimensional system and demonstrate its
applicability. Further, we will compare its numeri-
cal efficiency with the LMI approaches presented in
(Kruszewski et al., 2009; Sala and Arino, 2007; Gon-
zaleza et al., 2017), which are sufficient and asymp-
totically necessary.
ACKNOWLEDGEMENT
We thank the anonymous reviewers for useful sugges-
tions and references.
REFERENCES
Andersen, S., August, E., Hafstein, S., and Piccini, J.
(2023a). Lyapunov function computation for linear
switched systems: Comparison of SDP and LP ap-
proaches. In Proceedings of the 13th International
Conference on Simulation and Modeling Methodolo-
gies, Technologies and Applications, volume 1, pages
61–70.
Andersen, S., Giesl, P., and Hafstein, S. (2023b). Com-
mon Lyapunov functions for switched linear systems:
Linear programming-based approach. IEEE Control
Systems Letters, 7:901–906.
Andersen, S., Hafstein, S., Roman, J., and van den Eijn-
den, S. (2024). Efficient implementation of piece-
wise quadratic Lyapunov function computations for
switched linear systems. In Proceedings of the 21tst
International Conference on Informatics in Control,
Automation and Robotics (ICINCO),, volume 1, pages
277–284.
Camlibel, M. and Pang, S.-J.and Shen, J. (2006).
Conewiselinear systems: Non-zenoness and observ-
ability. SIAM Journal on Control and Optimization,
45(5):1769–1800.
Deenen, D., Sharif, B., van den Eijnden, S., Nijmeijer, H.,
Heemels, M., and Heertjes, M. (2021). Projection-
based integrators for improved motion control: For-
malization, well-posedness and stability of hybrid
integrator-gain systems. Automatica, 133:109830.
Filippov, A. (1988). Differential Equations with Discon-
tinuous Right-hand Side. Kluwer. Translated from
Russian, original book from 1985.
Giesl, P., Hafstein, S., and Pokkakkillath, S. (2025). Piece-
wise quadratic Lyapunov functions for stochastic dif-
ferential equations by linear programm. Discrete Con-
tin. Dyn. Syst. Ser. B, 30(6):2027–2050.
Gonzaleza, T., Sala, A., Bernal, M., and Robles, R.
(2017). Piecewise-Takagi–Sugeno asymptotically ex-
actestimation of the domain of attractionof nonlinear
systems. J. Frank. Inst., 354:1514–1541.
Hafstein, S. (2019). Simulation and Modeling Method-
ologies, Technologies and Applications, volume 873
of Advances in Intelligent Systems and Computing,
Verifying Positivity of Piecewise Quadratic Lyapunov Functions
443

chapter Fast Algorithms for Computing Continuous
Piecewise Affine Lyapunov Functions, pages 274–
299. Springer.
Ikramov, K. and Saveleva, N. (2000). Conditionally definite
matrices. J. Math. Sci., 98(1):1–50.
Johansson, M. (1999). Piecewise Linear Control Systems.
PhD thesis: Lund University, Sweden.
Johansson, M. and Rantzer, A. (1998). Computation of
piecewise quadratic Lyapunov functions for hybrid
systems. IEEE Trans. Automat. Control, 43(4):555–
559.
Kruszewski, A., Sala, A., Guerra, T., and Arino, C. (2009).
A triangulation approach to asymptotically exact con-
ditions for fuzzy summation. IEEE Trans. Fuzzy Syst.,
17(5):985–994.
Marinósson, S. (2002). Stability Analysis of Nonlin-
ear Systems with Linear Programming: A Lyapunov
Functions Based Approach. PhD thesis: Gerhard-
Mercator-University Duisburg, Duisburg, Germany.
Palacios Roman, J., Hafstein, S., Giesl, P., van den Eijnden,
S., Andersen, S., and Heemels, M. (2024). Construct-
ing continuous piecewise quadratic Lyapunov func-
tions with linear programming. [Submitted].
Sala, A. and Arino, C. (2007). Asymptotically necessary
and sufficient conditions for stability andperformance
in fuzzy control: Applications of Polya’s theorem.
Fuzzy Sets Syst., 158:2671–2686.
Scherer, C. (2006). LMI relaxations in robust control. Eur.
J. Control, 12:3–29.
van den Eijnden, S., Heemels, M., Nijmeijer, H., and Heert-
jes, M. (2022). Stability and performance analysis of
hybrid integrator–gain systems: A linear matrix in-
equality approach. Nonlinear Analysis: Hybrid Sys-
tems, 45:101192.
van den Eijnden, S., Heertjes, M., Heemels, M., and Ni-
jmeijer, H. (2020). Hybrid integrator-gain systems:
A remedy for overshoot limitations in linear control?
IEEE Control Systems Letters, 4(4):1042 – 1047.
Walter, W. (1998). Ordinary Differential Equation.
Springer.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
444
