
Towards Scalable and Fast UAV Deployment
Tim Felix Lakemann
a
and Martin Saska
b
Department of Cybernetics, Czech Technical University, Karlovo namesti 13, Prague, Czech Republic
Keywords:
Object Detection, Segmentation and Categorization, Omnidirectional Vision, Multi-Robot Systems, Computer
Vision for Automation.
Abstract:
This work presents a scalable and fast method for deploying Uncrewed Aerial Vehicle (UAV) swarms. De-
centralized large-scale aerial swarms rely on onboard sensing to achieve reliable relative localization in real-
world conditions. In heterogeneous research and industrial platforms, the adaptability of the individual UAVs
enables rapid deployment in diverse mission scenarios. However, frequent platform reconfiguration often re-
quires time-consuming sensor calibration and validation, which introduces significant delays and operational
overhead. To overcome this, we propose a method that enables rapid deployment and calibration of vision-
based UAV swarms in real-world environments.
1 INTRODUCTION
Collaborative multi–UAV systems improve robust-
ness and operational efficiency across a wide range of
applications, from search and rescue to environmen-
tal monitoring (Bartolomei et al., 2023). Accurate
relative localization of team members is essential for
safe navigation, collision avoidance, and coordinated
task execution (Chung et al., 2018; Chen et al., 2022).
Global Navigation Satellite System (GNSS) alone is
often insufficient for these tasks due to its limited pre-
cision, unavailability in GNSS–denied environments,
and vulnerability to interference (Xu et al., 2020;
Zhou et al., 2022). Although alternatives such as
Real Time Kinematics (RTK)-GNSS and motion cap-
ture systems provide high accuracy, they require ex-
ternal infrastructure or connectivity, making them un-
suitable for many real-world scenarios (Chung et al.,
2018).
In swarm applications, vision-based relative local-
ization systems onboard offer scalable, cost-effective,
and decentralized solutions to detect and track other
UAVs, as shown in recent studies (Li et al., 2023;
Zhao et al., 2025).
From our experience deploying large-scale
swarms with diverse robot configurations and sen-
sors, we identified sensor calibration as a primary
bottleneck for fast real-world deployment. In both
industrial and research settings–such as object de-
tection, terrain analysis, or communication–aware
navigation-sensor changes are common and often ne-
a
https://orcid.org/0009-0000-4863-3235
b
https://orcid.org/0000-0001-7106-3816
Figure 1: Overview of collaborating UAVs using our prior
auto-generated masks for save collaboration.
cessitate recalibration. Although recent vision-based
methods based on deep learning (Schilling et al.,
2021; Xu et al., 2020; Oh et al., 2023) have shown
promise, Convolutional Neural Networks (CNNs)
are typically computationally intensive, require
large annotated datasets, tend to overfit to specific
platforms, and struggle to generalize to unseen
conditions like sun reflections (Funahashi et al.,
2021). Additionally, visible parts of UAV—-such as
the rotor arms, landing gear, or camera mount–can
introduce artifacts, degrade algorithm performance,
or require manual pre-processing. Such artifacts can
lead to false detections or misclassifications, causing
onboard systems to make incorrect decisions. In the
worst case, this can result in collisions with obstacles
or other agents in a collaborating swarm. One
possible mitigation strategy is to mount the camera
so that no part of the UAV frame appears in Field of
View (FOV); however, this is often impractical for
small aerial vehicles or when omnidirectional vision
Lakemann, T. F. and Saska, M.
Towards Scalable and Fast UAV Deployment.
DOI: 10.5220/0013713500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 243-250
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
243

is required. In addition, off-center mounting can shift
the center of mass, compromising flight stability,
particularly critical for agile or tightly constrained
UAV platforms.
An effective solution to mitigating reflections and
other artifacts caused by the UAV frame in camera im-
ages is to generate a mask that excludes these regions.
However, manually annotating such frame regions in-
troduces a significant bottleneck, hindering scalability
and delaying the deployment of perception pipelines
across different UAV platforms. The problem of au-
tomatically identifying and masking the visible UAV
frame has received limited attention in the literature
and, to the best of the authors’ knowledge, is often ne-
glected entirely, risking the misclassification of struc-
tural elements of the observing UAV–or handled man-
ually.
In this work, we propose a novel approach for
automatic detection and masking of the UAV frame
in on-board imagery. This method serves as an en-
abling technology for the rapid preparation and de-
ployment of large-scale aerial swarms (Fig. 1). It is
lightweight, does not require prior training, and is
adaptable to various camera models and UAV config-
urations. The approach supports user interaction and
validation, producing high-quality masks that effec-
tively exclude visible UAV structures, thereby facil-
itating faster deployment while improving the safety
and reliability of swarm operations.
The proposed approach is open-source and avail-
able at https://github.com/ctu-mrs/uvdar core/blob/
master/scripts/extract mask.py.
2 STATE OF THE ART
The automatic mask generation to extract the frame
of UAV is a problem not present in the current litera-
ture. However, object detection algorithms have been
employed to identify and mask unwanted elements in
UAV imagery. For example, in (Pargieła, 2022), the
authors used YOLOv3 to detect and mask vehicles
in images acquired from UAV, thereby enhancing the
quality of digital elevation models and orthophotos.
CNNs have been widely adopted for semantic
segmentation. These models assign class labels to
each pixel, facilitating a detailed understanding of
the scene. For example, in (Soltani et al., 2024),
the authors demonstrated the efficacy of segmentation
based on CNN in orthoimagery UAV for the classi-
fication of plant species. They use a two–step ap-
proach. First they trained a CNN-based image clas-
sification model using simple labels and applied it in
a moving-window approach over UAV orthoimagery
to create segmentation masks. In the second phase,
these segmentation masks were used to train state-of-
the-art CNN-based image segmentation models with
an encoder–decoder structure.
However, training such models requires labeled
datasets, which are often scarce in UAV applications
due to the labour-intensive nature of manual annota-
tion. To mitigate this, researchers have explored the
use of synthetic data. In (Hinniger and R
¨
uter, 2023),
the authors generated synthetic training data using
game engines to simulate UAV perspectives, thereby
augmenting real datasets and improving model per-
formance. The recent work of (Maxey et al., 2024)
introduces a simulation platform for UAV perception
tasks using Neural Radiance Fields (NeRF) (Milden-
hall et al., 2021). While the focus is on generating
synthetic datasets for tasks like obstacle avoidance
and navigation, a key contribution is the explicit 3D
modeling of the UAV structure and camera perspec-
tives, which inherently involves managing occlusions
and self-visibility. Mask-guided techniques have also
been explored in generative tasks. For instance,in
(Zhou et al., 2024), the authors used semantic masks
to control UAV-based scene synthesis, showcasing
the broader applicability of mask-based conditioning
in UAV imagery.
Recent advancements have seen the integration of
transformer architectures in UAV image segmenta-
tion. Models like the Aerial Referring Transformer
(AeroReformer) (Li and Zhao, 2025) and Pseudo
Multi-Perspective Transformer (PPTFormer) (Ji et al.,
2024) have been proposed to address the unique
challenges posed by UAV imagery, such as vary-
ing perspectives and scales. AeroReformer lever-
ages vision-language cross-attention mechanisms to
enhance segmentation accuracy, while PPTFormer in-
troduces pseudo-multiperspective learning to simu-
late diverse UAV viewpoints.
2.1 Contributions
While existing works primarily focus on the detec-
tion and segmentation of external objects, we address
the less-explored task of automatically detecting and
masking the UAV frame within onboard imagery. Ac-
curate extraction of the UAV frame enables more reli-
able downstream tasks such as object detection, track-
ing, and relative localization, by preventing false de-
tections on the UAV’s own structure. The main con-
tributions of our work are as follows:
1. We propose a novel method for the automatic de-
tection and masking of the UAV frame in onboard
UAV imagery.
2. Our approach incorporates camera-specific
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
244

heuristics and leverages spatial relationships via
a k-d tree structure, resulting in a lightweight and
adaptable solution that generalizes across differ-
ent UAV platforms and camera configurations.
3. The proposed user-interactive mask generation
pipeline does not require prior training or la-
beled datasets, enabling rapid deployment and
customization without the need for supervised
learning.
4. Automation of this process facilitates the efficient
preparation and deployment of large-scale UAV
swarms independent of the UAV platform.
3 METHOD
The method presented in this paper enables a user-
interactive mask generation pipeline that extracts the
UAV frame from camera images, improving both the
faster deployment of UAV swarms and safety. The
goal is to automatically detect the frame of the UAV
and mask out the frame of the UAV without any user
editing. Our method is not limited to a specific sys-
tem, but applies to any system that requires mask gen-
eration of shining parts, usually part of the UAV car-
rying the camera.
3.1 Image Acquisition
To achieve consistent results, the exposure time and
gain settings are fixed, but can be easily adjusted. A
dark floor as well as a bright UAV frame is benefi-
cial but is not explicitly required. Further, a dominant
light source should be placed above the UAV to en-
sure visibility of the frame of the UAV.
3.2 Automated Mask Generation
Automated mask generation is the core of the pro-
posed method. In case the image is not a grayscale
image, the image would need to be converted to
grayscale. Therefore, the grayscale image is denoted
by
I : {0, . . . , H −1} × {0, . . . ,W − 1} → {0, . . . , 255}
(1)
with H denoting the height of the image and W the
width of the image, where I(y, x) denotes the inten-
sity of the pixels with y ∈ {0, . . . , H − 1} and x ∈
{0, . . . ,W − 1}. Each candidate pixel is checked us-
ing camera-specific constraints to suppress irrelevant
regions and reduce false-positive detections. These
heuristics depend on the physical location of the cam-
era (e.g. left, right, or back on the UAV) and aim to
eliminate known areas with ambient reflections or ar-
tifacts.
To reduce false positives due to ambient reflec-
tions, we define a camera-specific geometric heuris-
tic:
H
cam
⊆ {0, . . . , H −1} × {0, . . . ,W − 1} (2)
which encodes regions of the image known to produce
spurious reflections.
We define the filtered domain as:
D
′
= (0, . . . , H −1 × 0, . . . ,W − 1) \ H cam, (3)
and restrict the image I to this domain:
I
′
= I|D
′
. (4)
Our mask generation algorithm is therefore only ap-
plied to I
′
. In I
′
pixel values exceeding a threshold σ
are considered as potential regions of the UAV frame
and stored in the set, denoted by:
P =
(y, x) ∈ D
′
| I
′
(y, x) > σ
. (5)
Further,
η < |P |, (6)
must be satisfied, with η denoting the minimum de-
tected points in the camera image. By discarding
these dark images, potentially fine masks are not cre-
ated.
To improve computational efficiency, the points in
P are stored in a k-d tree T with leaf size l. The
tree T is then used to find the k nearest neighbors of
each point in P . For each point p ∈ P , the Euclidean
distance to each of its k nearest neighbors q ∈ N
k
(p)
is computed as
d(p, q) = ∥p − q∥
2
, (7)
where N
k
(p) denotes the set of k nearest neighbors of
p. For each q ∈ N
k
(p), if
d(p, q) < τ, (8)
then, the pixel q and the pixel p are considered to be-
long to the same mask in the image, and q is added to
the mask set M
p
associated with p. The collection of
all such mask sets is denoted by
M = {M
p
| p ∈ P }. (9)
The sets in M are filled with black color.
To approximate spatial groupings of bright points,
each set M
p
is used to construct a polygon. The points
in M
p
are not explicitly ordered, which may lead to
self-intersecting polygons. These polygons are raster-
ized and used to produce a binary mask in which each
Towards Scalable and Fast UAV Deployment
245

UV Camera
UV LEDs
Figure 2: The UVDAR system attached to a UAV and used
in the experiments (Licea et al., 2023).
region is filled with black. Overlaps between differ-
ent sets M
p
are not explicitly handled; hence, inter-
secting areas may be filled multiple times, resulting
in a binary mask. Once all regions have been filled,
the contours are extracted from the previously gen-
erated binary mask. These contours are then explic-
itly drawn on the same mask image with a specified
line thickness (κ), reinforcing the region boundaries
in the binary mask. The union of all rasterized and
contoured polygons is denoted as poly(M
p
), and the
final binary mask image Imasked is defined as:
I
masked
(x) =
black, if x ∈
S
p∈P
poly(M
p
)
white, otherwise
. (10)
3.3 Interactive Mask Generation
Since validating the masks after creation is essential, a
lightweight user interface is provided to support real-
time inspection. The user monitors the live stream
from the camera and, when the mask creation is acti-
vated, the generated binary mask I
masked
, the original
image I, and their overlay I
overlay
are displayed. The
overlay image I
overlay
is calculated as a visual combi-
nation of the original image and the binary mask:
I
overlay
= overlay(I, I
masked
), (11)
where overlay denotes a pixel-wise operation that
highlights masked regions on top of the original im-
age for visualization. This allows the user to imme-
diately assess whether the mask is satisfactory or if it
should be discarded and regenerated.
4 EVALUATION
To evaluate our proposed mask generation system,
we used the UltraViolet Direction And Ranging
(UVDAR) system, a mutual relative localization
framework for UAV swarms that operates in the Ul-
tra Violet (UV) spectrum (Fig. 2) (Walter et al.,
2019; Horyna et al., 2024; Walter et al., 2018). In
(a) (b)
Figure 3: (a) Side view of the UAV frame, and (b) top view
of the UAV frame used in the experiments Two cameras
with approximately a FOV of 180 degrees.
Table 1: Parameter settings used during the experiments.
Parameter Value Description
σ 120 Binarization threshold
η 20 Min. number of detected points
l 10 Leaf size of T
κ 50 Border Thickness
k 20 nearest neighbors
τ 50 max. distance between neighbors
the UVDAR system, cameras are equipped with UV
bandpass filters (Walter et al., 2018), which signifi-
cantly attenuate visible light and allow only UV light
to pass through. The swarm members are equipped
with UV-Light Emitting Diodes (LEDs) that blink in
predefined sequences, enabling the unique identifica-
tion of each UAV within the swarm. However, the
UV light emitted by these LEDs can reflect off the
structure of the observing UAV, potentially causing
false detections in the camera image. As a result, ac-
curately masking the own structure of the UAV be-
comes a critical requirement for reliable operation of
the UVDAR system. In typical indoor environments
such as offices–where ambient UV illumination is
minimal–the captured images appear predominantly
dark. Therefore, to ensure proper scene visibility, the
user was holding a strong UV light source above the
observing UAV, as described in Section 3.1, thereby
illuminating the environment for effective mask gen-
eration (see Figs. 4a and 4b). Grayscale cameras op-
erating under adequate ambient lighting conditions do
not require such additional UV illumination.
The evaluation was conducted on two UAV frames
using different exposure settings, as detailed in Tab. 2.
The high rotational speed of the propellers prevents
them from generating noticeable reflections in the
camera image. Therefore, they were removed during
our mask-generation process. Fig. 3 shows a UAV
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
246
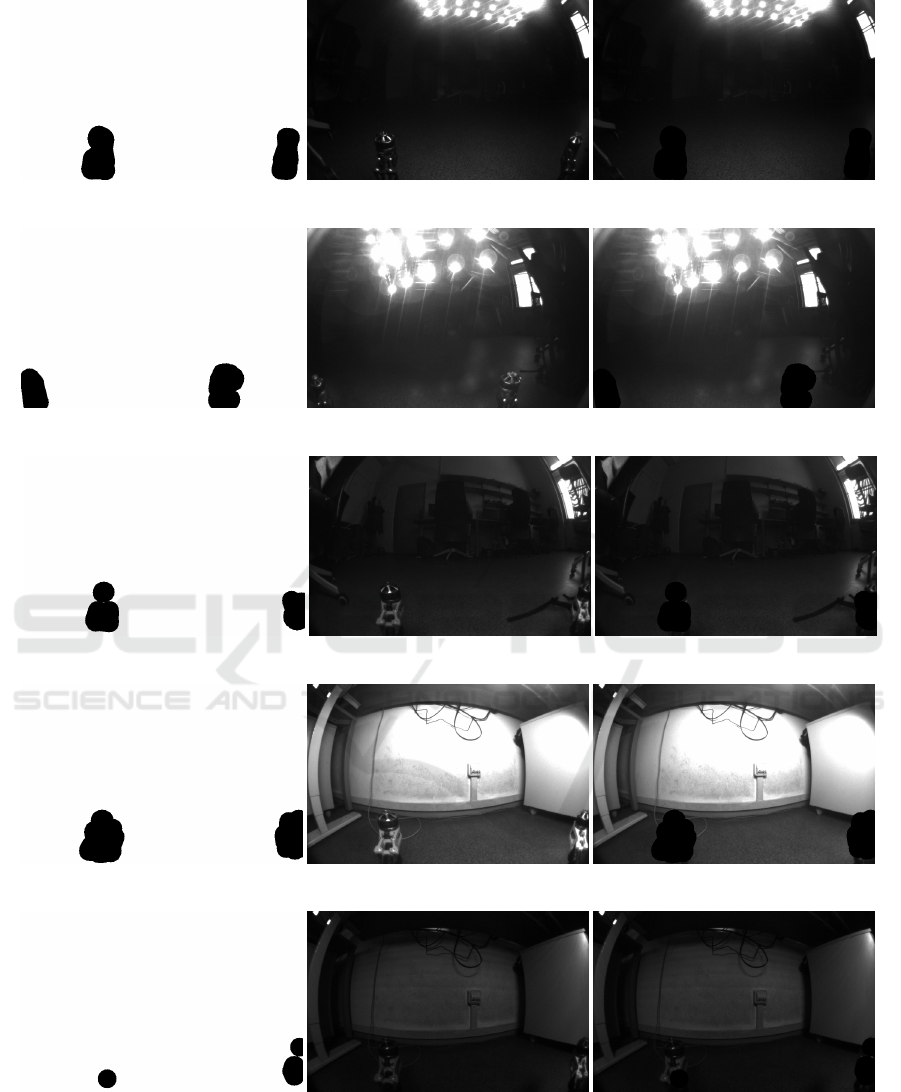
(a) Exp. 1: Sample from UAV1, right camera, with exposure setting: 5000 µs.
(b) Exp. 2: Sample from UAV1, left camera, with exposure setting: 5000 µs.
(c) Exp. 3: Sample from UAV2 right camera, with exposure setting: 25000 µs.
(d) Exp. 4: Sample from UAV2, right camera, with exposure setting: 5000 µs.
(e) Exp. 5: Sample from UAV2, right camera, with exposure setting: 5000 µs.
Figure 4: Qualitative analysis of the generated segmentation masks from different experimental trials. Left to right: generated
mask (I
masked
), input image (I), and overlay image (I
overlay
). Figures 4a–4d demonstrate successful mask extraction, while
Fig.4e shows a failure case under identical conditions to Fig.4d, caused by the removal of the external light source.
Towards Scalable and Fast UAV Deployment
247
Table 2: Average Area, Perimeter, and Compactness with standard deviation for each camera (left or right), exposure time
(µs), and UAV for each mask in the image (left and right).
Area [px
2
] Perimeter [px] Compactness
left right left right left right
Exp. UAV Cam Exposure [µs] µ ± σ µ ± σ µ ± σ µ ± σ µ ± σ µ ± σ
1 1 right 5000 8199 ± 619 11477 ± 1042 400 ± 29 471 ± 30 19.6 ± 2.3 19.3 ± 0.9
2 1 left 5000 5901 ± 438 8931 ± 568 317 ± 16 401 ± 13 17.1 ± 0.8 18.0 ± 1.2
3 2 right 25000 11268 ± 2808 7013 ± 1019 458 ± 74 342 ± 26 18.9 ± 2.1 16.8 ± 0.5
4
2 right 2500 9147 ± 3172 5479 ± 1567 392 ± 88 293 ± 49 17.4 ± 1.6 16.0 ± 0.6
5 2 right 5000 7486 ± 2206 6992 ± 1943 393 ± 69 383 ± 88 21.8 ± 4.4 21.4 ± 5.0
frame used for evaluation, equipped with two cam-
eras oriented 140 degrees apart, each with a FOV of
180 degrees. In total, we tested our approach on three
BlueFOX-USB cameras mounted on the two UAVs.
The evaluation is divided into two parts: quantitative
and qualitative analysis.
The quantitative analysis focuses on the consis-
tency and variability of the segmentation masks gen-
erated across different cameras and exposure settings.
This includes analyzing geometric properties such
as the area, perimeter, and compactness of the seg-
mented regions. Qualitative analysis, on the other
hand, evaluates the visual quality of the masks and
their ability to accurately exclude the UAV frame.
In the context of the UVDAR system, a horizon-
tal cut is applied to each frame to separate the upper
and lower image regions. This is necessary because
the upper part of the image may contain parts of the
light source illuminating the image, which should be
excluded from the analysis. We define the top and
bottom regions of the image as follows:
I
top
(y, x) = I(y, x), for y ∈
0,
3
4
H
− 1
∩ D
′
,
(12)
I
bottom
(y, x) = I(y, x), for y ∈
3
4
H
, H − 1
∩ D
′
.
(13)
The segmentation process is designed to run off-
board, on a computer with graphical output capabil-
ities. This setup is usually not feasible or cumber-
some on lightweight onboard computers such as the
NVIDIA Jetson or Intel NUC platforms commonly
used on UAVs.
4.1 Mask Shape Analysis via
Compactness Metrics
To quantitatively assess the consistency and quality of
the generated segmentation masks, we analyzed their
geometric properties under varying exposure settings,
cameras, and UAVs. In total, we evaluated 70 masks,
each generated under different conditions.
We applied connected component analysis to each
binary mask after filtering out the UAV frame, iden-
tifying valid contiguous regions. For each compo-
nent, we computed three key shape descriptors: area,
perimeter, and compactness, where compactness is
defined as:
compactness =
perimeter
2
area
. (14)
This metric captures the shape regularity of a com-
ponent, with lower values generally indicating more
compact, circular shapes, and higher values reflecting
more elongated or irregular regions.
Masks were categorized by UAV, camera orien-
tation (left or right), and exposure time. Since each
UAV included masked regions for both the left and
right arms, we evaluated these regions separately. For
each category, we computed the mean and standard
deviation of the area, perimeter, and compactness in
all valid components, as shown in Table 2.
We observed that masks generated under low ex-
posure settings exhibited higher standard deviations,
particularly in Experiment 4 (UAV 2, right camera,
2500 µs exposure time). This increased variability
indicates a greater sensitivity to lighting conditions,
where reduced exposure results in noisier and less
consistent segmentations. In contrast, masks captured
with exposure times of 5000 µs and 25000 µs showed
lower variation and more stable compactness values,
suggesting improved reliability in mask generation.
Among these, an exposure time of 5000 µs provides a
favorable balance between noise suppression and seg-
mentation quality.
4.2 Qualitative Analysis
The qualitative analysis focused on evaluating the
visual quality of the generated segmentation masks.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
248

Figure 4 presents five examples of mask images
(I
masked
) under varying exposure settings, environ-
mental conditions (background), and camera configu-
rations, along with the corresponding input image (I)
and overlay image I
overlay
. Our approach successfully
extracted the UAV frame across all scenarios tested.
As illustrated in Fig. 4e, mask generation failed in
the absence of the artificial light source, highlight-
ing the sensitivity of the method to scene illumination.
However, as shown in Fig. 4d, the algorithm success-
fully extracted the UAV frame using the same camera
and setup, the only difference being the positioning
of the light source. This underscores the importance
of maintaining consistent and adequate lighting con-
ditions during mask generation to ensure reliable re-
sults.
4.3 Limitations
The generated segmentation masks are generally of
good quality, with relatively few false positives and
false negatives, although some noise or artifacts may
still be present. To further improve robustness, the al-
gorithm should be evaluated across a wider range of
frame types and color variations. In low-light condi-
tions, detection of the UAV frame can become more
challenging, which can occasionally lead to missed
detections.
4.4 Future Work
The proposed algorithm successfully generated masks
for the UAV frame in all evaluated scenarios. For fu-
ture work, we plan to explore the use of an unsuper-
vised Vision Transformer (ViT) to learn the structural
characteristics of different UAV frames and enable
automatic mask generation. Specifically, our goal is
to employ a self-supervised learning framework based
on a student-teacher architecture, which can learn ro-
bust representations of the frame structure without the
need for labeled data. This would further improve
the adaptability and scalability of the masking process
across varying UAV configurations.
5 CONCLUSIONS
This work introduced a novel method for automati-
cally detecting and masking the frame of a UAV in
the images of the camera onboard. By excluding
the structure of the UAV in the onboard camera, the
method reduces the risk of misclassification, prevent-
ing parts of the UAV from being interpreted as obsta-
cles or other agents in multi-UAV systems. This au-
tomation significantly enhances the scalability and ef-
ficiency of swarm deployment, addressing a task that
is otherwise labour-intensive and does not scale when
done manually. Leveraging camera-specific geomet-
ric heuristics and a k-d tree structure, the proposed
algorithm achieves accurate and efficient frame detec-
tion across varying UAV designs and camera config-
urations. Quantitative and qualitative results across
multiple platforms confirm the adaptability and ro-
bustness of the method in various operating condi-
tions. In general, the proposed approach improves the
safety of swarm navigation and onboard vision sys-
tems, while also streamlining the preparation and de-
ployment of multi-UAV systems.
ACKNOWLEDGEMENTS
This work was funded by CTU grant no
SGS23/177/OHK3/3T/13, by the Czech Science
Foundation (GA
ˇ
CR) under research project no.
23-07517S and by the European Union under the
project Robotics and advanced industrial production
(reg. no. CZ.02.01.01/00/22 008/0004590).
REFERENCES
Bartolomei, L., Teixeira, L., and Chli, M. (2023). Fast
multi-uav decentralized exploration of forests. IEEE
Robotics and Automation Letters, 8(9):5576–5583.
Chen, S., Yin, D., and Niu, Y. (2022). A survey of
robot swarms’ relative localization method. Sensors,
22(12).
Chung, S.-J., Paranjape, A. A., Dames, P., Shen, S., and
Kumar, V. (2018). A survey on aerial swarm robotics.
IEEE Transactions on Robotics, 34(4):837–855.
Funahashi, I., Yamashita, N., Yoshida, T., and Ikehara, M.
(2021). High reflection removal using cnn with de-
tection and estimation. In 2021 Asia-Pacific Signal
and Information Processing Association Annual Sum-
mit and Conference (APSIPA ASC), pages 1381–1385.
Hinniger, C. and R
¨
uter, J. (2023). Synthetic training data for
semantic segmentation of the environment from uav
perspective. Aerospace, 10(7).
Horyna, J., Kr
´
atk
´
y, V., Pritzl, V., B
´
a
ˇ
ca, T., Ferrante, E.,
and Saska, M. (2024). Fast swarming of uavs in
gnss-denied feature-poor environments without ex-
plicit communication. IEEE Robotics and Automation
Letters, 9(6):5284–5291.
Ji, D., Jin, W., Lu, H., and Zhao, F. (2024). Pptformer:
Pseudo multi-perspective transformer for uav segmen-
tation.
Li, H., Cai, Y., Hong, J., Xu, P., Cheng, H., Zhu, X., Hu,
B., Hao, Z., and Fan, Z. (2023). Vg-swarm: A vision-
based gene regulation network for uavs swarm behav-
Towards Scalable and Fast UAV Deployment
249

ior emergence. IEEE Robotics and Automation Let-
ters, 8(3):1175–1182.
Li, R. and Zhao, X. (2025). Aeroreformer: Aerial referring
transformer for uav-based referring image segmenta-
tion.
Licea, D. B., Walter, V., Ghogho, M., and Saska, M. (2023).
Optical communication-based identification for multi-
uav systems: theory and practice.
Maxey, C., Choi, J., Lee, H., Manocha, D., and Kwon,
H. (2024). Uav-sim: Nerf-based synthetic data gen-
eration for uav-based perception. In 2024 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 5323–5329.
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2021). Nerf: represent-
ing scenes as neural radiance fields for view synthesis.
Commun. ACM, 65(1):99–106.
Oh, X., Lim, R., Foong, S., and Tan, U.-X. (2023). Marker-
based localization system using an active ptz camera
and cnn-based ellipse detection. IEEE/ASME Trans-
actions on Mechatronics, 28(4):1984–1992.
Pargieła, K. (2022). Vehicle detection and masking in
uav images using yolo to improve photogrammetric
products. Reports on Geodesy and Geoinformatics,
114:15–23.
Schilling, F., Schiano, F., and Floreano, D. (2021). Vision-
based drone flocking in outdoor environments. IEEE
Robotics and Automation Letters, 6(2):2954–2961.
Soltani, S., Ferlian, O., Eisenhauer, N., Feilhauer, H., and
Kattenborn, T. (2024). From simple labels to semantic
image segmentation: leveraging citizen science plant
photographs for tree species mapping in drone im-
agery. Biogeosciences, 21:2909–2935.
Walter, V., Saska, M., and Franchi, A. (2018). Fast mutual
relative localization of uavs using ultraviolet led mark-
ers. In 2018 International Conference on Unmanned
Aircraft System (ICUAS 2018).
Walter, V., Staub, N., Franchi, A., and Saska, M. (2019).
Uvdar system for visual relative localization with ap-
plication to leader–follower formations of multiro-
tor uavs. IEEE Robotics and Automation Letters,
4(3):2637–2644.
Xu, H., Wang, L., Zhang, Y., Qiu, K., and Shen, S. (2020).
Decentralized visual-inertial-uwb fusion for relative
state estimation of aerial swarm. In 2020 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 8776–8782.
Zhao, J., Li, Q., Chi, P., and Wang, Y. (2025). Active
vision-based uav swarm with limited fov flocking in
communication-denied scenarios. IEEE Transactions
on Instrumentation and Measurement, pages 1–1.
Zhou, W., Zheng, N., and Wang, C. (2024). Synthesizing
realistic traffic events from uav perspectives: A mask-
guided generative approach based on style-modulated
transformer. IEEE Transactions on Intelligent Vehi-
cles, pages 1–16.
Zhou, X., Wen, X., Wang, Z., Gao, Y., Li, H., Wang, Q.,
Yang, T., Lu, H., Cao, Y., Xu, C., and Gao, F. (2022).
Swarm of micro flying robots in the wild. Science
Robotics, 7(66):eabm5954.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
250
