
Approximating MPC Solutions Using Deep Neural Networks:
Towards Application in Mechatronic Systems
Edward Kikken, Jeroen Willems, Branimir Mrak and Bruno Depraetere
Flanders Make, Lommel, Belgium
Keywords:
Optimal Control, Motion Control, Trajectory Planning, Artificial Neural Networks, Mechatronics.
Abstract:
Model Predictive Control is an advanced control technique that can yield high performance, but it is often
challenging to implement. Especially for systems with dynamics that are complex to model, have strong non-
linearities, and/or have small time constants, it is often not possible to complete the needed online optimizations
fast and reliable enough. In this work we look at approximating the MPC solutions using black-box models
i.e. deep neural networks, so that the computational load at runtime is strongly reduced. We use a supervised
learning approach to train these models to yield outputs similar to those of an example dataset of offline
pre-computed MPC solutions. We illustrate this approach on three realistic (active-suspension system, parallel
robot, and a truck-trailer), illustrating the typical workflow and how the approach has to be set up to address the
varying challenges. We show that the approximate MPC solutions yield a high level of performance, reaching
nearly the level of the original MPC, yet at a strongly reduced computational load.
1 INTRODUCTION
There is an increasing need for advanced control,
due to stricter requirements for accuracy, productivity
and/or energy efficiency, as well as systems becom-
ing more complex and being used in more variable
conditions. One option to achieve this is Model Pre-
dictive Control (MPC). This is a powerful technique
that, during operation, at every time step, chooses the
best control action by solving a numerical optimiza-
tion problem, using a model for the system dynamics
to evaluate the impact of the different control choices
on the constraints and the cost function (Rawlings,
2000). One of the key drawbacks of MPC is the com-
putational burden associated with the aforementioned
optimization. As a result, MPC becomes too slow
and/or too difficult to run on industrial controllers, es-
pecially for (i) systems with small time constants, (ii)
systems with many states, and/or (iii) systems with
highly non-linear dynamics (for which MPC is often
denoted NMPC).
This can be resolved in two different manners.
Firstly, the MPC can be improved, by e.g., simplifying
the models, or by improving the used optimization
routines so they converge more quickly and more reli-
ably (Vanroye et al., 2023). Secondly, and what this
paper will focus on, is to not solve the MPC itself dur-
ing machine operation, but to instead pre-calculate and
approximate its solution, so that during machine op-
eration the calculation of the control does not involve
the solving of an online optimization problem.
Already several works have looked at such ap-
proaches for pre-calculating MPC solutions. Histori-
cally, explicit MPC was developed in (Bemporad et al.,
2000). In this and later works, it was shown that for
an MPC applied to a system with affine dynamics
and constraints, as well as a quadratic cost, the con-
trol output is a piecewise affine function of the states.
The MPC solution is then essentially equal to a set
of linear controllers, depending on the current system
state. And crucially, these can all be pre-calculated
and stored in a big look up table. The main draw-
backs of this approach are (i) the exponential scaling
of the number of needed regions as a function of the
problem size, and (ii) the lack of support for general
non-linear dynamics. Due to the first, approximations
of non-linear dynamics cause explicit MPC to quickly
become non-tractable.
In an attempt to address these issues, several works
have looked at approximating the MPC solutions, in-
stead of trying to exactly describe them. Approxi-
mations have been built using for example polynomi-
als (Kvasnica et al., 2011) or multi-scale basis func-
tions (Summers et al., 2011). Recently, neural net-
works have also been considered. For example, com-
bined with a learning scheme to adapt weights and
Kikken, E., Willems, J., Mrak, B. and Depraetere, B.
Approximating MPC Solutions Using Deep Neural Networks: Towards Application in Mechatronic Systems.
DOI: 10.5220/0013712900003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 71-81
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
71

biases to capture optimal control outputs (Parisini
and Zoppoli, 1995), and MPC solutions (Winqvist
et al., 2021; Chen et al., 2018). Some more recent
works have switched to using supervised learning, to
directly learn from examples generated using an MPC
or NMPC controller offline (Hertneck et al., 2018; Nu-
bert et al., 2020; Lucia et al., 2021). In recent works
such an approach has been applied to non-linear sys-
tems as well as linear ones (Hertneck et al., 2018; Lu-
cia and Karg, 2018). Several works have also looked at
describing or bounding the accuracy or suboptimality
of the solutions (Hertneck et al., 2018), trained sec-
ondary networks (Zhang et al., 2019) to indicate when
suboptimality or even infeasibility becomes an issue,
or proposed architectures relying on cloud-based su-
pervision (Adamek and Lucia, 2023). Recent work
has also looked at fine-tuning such methods after de-
ployment (Hose et al., 2024).
Such Approximate MPC or A-MPC has been
applied to various applications, including building
HVAC (Karg and Lucia, 2018), a polymerization (Lu-
cia and Karg, 2018) and a stirred tank reactor (Hert-
neck et al., 2018), step down (Maddalena et al., 2020)
and resonant power convertors (Lucia et al., 2021),
robots (Nubert et al., 2020), and battery charging
(Pozzi et al., 2022). Our contribution is to apply it
to several more and diverse examples: one straightfor-
ward, one with a finite task and an economical cost,
and one on path planning with two families of differ-
ing solutions. These later two introduce challenges
not tackled in the existing examples, and we propose
several A-MPC changes to handle those. To tackle
the finite tasks we provide the A-MPC with extra in-
formation on the remaining task, allowing the net-
work to adapt during the execution. To tackle the
path planning we treat the A-MPC as a mixed integer
control problem, and add a classifier for the integer
values. This differs from existing approaches like us-
ing deeper networks (Karg and Lucia, 2018), or using
stochastic (Bernoulli) layers to handle integer vari-
ables (Okamoto et al., 2024). Furthermore we will
look into the trade-off between the number of MPC
training examples and the resulting A-MPC perfor-
mance, since in practice generating data for training
these A-MPC takes significant time. Detailed statisti-
cal analysis of robustness for these applications will
however be left to future work.
2 PRELIMINARIES
In this section, we first introduce the mathematical no-
tation considered in this paper, and then give a generic
MPC formulation, on which we will build further.
2.1 Notation
We denote
R
n
as the set of real vectors of dimension
n
, and
R
m×n
as the set of real matrices of dimension
m × n
. A control sequence [
u
1
u
2
· · · u
N
]
T
∈ R
is denoted by the bold vector u with
N ∈ N
discrete
samples. A specific sample is given by integer
·
(
k
)
with k ∈ N.
2.2 Generic Model-Predictive Control
(MPC)
Model Predictive Control (MPC) is a generic class
of control methods which utilize a dynamic model to
predict the future response of the system, and choose
the control actions yielding the best predicted response
(given a cost function and constraints). To do so, at
each control interval in a given finite-time horizon (of
N
samples), MPC optimizes current and future con-
trols and state trajectories (Qin and Badgwell, 2003).
Once the optimal controls are found, the first values
are applied at the current time-step, the system’s re-
sponse is observed, and the MPC is optimized again
starting from the observed system state. This proce-
dure is repeated at every time step, which allows the
MPC to react in a manner similar to feedback control,
to deviations due to e.g., model-plant mismatch and
disturbances. Using the predictive approach it also
becomes straightforward to exploit preview or predic-
tions of upcoming events like disturbances or external
loads.
As said, the MPC relies on a model. Here, we
consider a discrete-time model:
x(k + 1) = f (x(k), u(k)),
(1)
with the dynamic states x(
k
)
∈ R
n
x
and the control
actions u(
k
)
∈ R
n
u
, with
n
x
and
n
u
the number of states
and inputs respectively. In the above,
f
denotes the
state propagation function (e.g., ordinary differential
equation (ODE)). This generic function can be linear
or non-linear, SISO or MIMO, etc.
This model can then be used to set up the MPC
formulation. Here, we use a horizon of
N ∈ N
intervals
(samples), yielding:
minimize
x(·),u(·)
J (x(·), u(·)), (2a)
s. t. (1) ∀ k ∈ [1, N],
(2b)
¯
x ≤ x(k) ≤
¯
x ∀ k ∈ [1, N + 1],
(2c)
¯
u ≤ u(k) ≤
¯
u ∀ k ∈ [1, N],
(2d)
¯
g ≤ g(x(·), u(·), y(·), p) ≤
¯
g. (2e)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
72

with cost function
J
(x
(·),
u
(·)
). Matrix x
(·) ∈
R
n
x
×N+1
contains the optimization variables over
the entire horizon for the differential states: x
(·)
=
x
1
, x
2
, . . . , x
N
, x
N+1
, and u
∈ R
n
u
×N
similarly con-
tains all control actions. In the above, (2a) implements
the cost function, (2c) and (2d) implement lower and
upper bounds on the state and input variables, and
(2e) implements miscellaneous constraints (e.g., initial
condition and path constraints).
As mentioned previously, MPC solves the opti-
mization problem denoted in (2) at every time step.
After solving, the first sample of the computed input
sequence u
(·)
is then applied to the system, i.e., u
(1)
,
and we again solve the optimization problem for the
next time sample.
3 PROPOSED APPROACH
Our proposed approach to approximate MPC solutions
using black-box models, namely deep neural networks
(DNN) consists out of three steps:
1.
Offline, we formulate the MPC problem (see Sec-
tion 2.2) for the use-case at hand and solve it for a
large combination of states, constraints, possibly
model-variants, etc. The goal is to capture the de-
sired operating region of the system / task. The
result is an input dataset
X
containing the system
states and additional features like e.g. obstacle
locations or the time left to task completion, and
an output dataset
U
containing the optimal control
actions as computed by the MPC.
2.
Still offline, DNN is trained that aims to approxi-
mate the mapping from input dataset
X
to output
dataset U.
3.
At run-time, DNN is used to calculate the plant
input as a function of the current input features, and
aims to act as a direct replacement to the original
MPC controller.
3.1 MPC Problem Formulation and
Dataset Generation
In order to set-up the MPC for a given application,
we use the template from Section 2.2 and implement
application-specific costs and constraints. We use
CasADi (Andersson et al., 2019) to set-up the mod-
els and optimization problems, and the solver IPOPT
(Biegler and Zavala, 2009) is used to efficiently solve
the problem.
As mentioned previously, the goal is to create two
datasets:
•
Input dataset
X ∈ R
N
x
×M
containing
N
x
∈ N
fea-
tures, such as states, as well as additional features
like current sample in the task and time to com-
pletion, potentially a preview of upcoming distur-
bances or other external signals relevant to the con-
troller, locations of obstacles, etc.
M ∈ N
denotes
the total number of MPC solutions in the dataset.
•
Output dataset
U ∈ R
N
u
×M
containing the optimal
control actions (e.g. torques, forces, trajectories).
N
u
∈ N denotes the number of outputs.
The goal is to generate a rich dataset, covering the
states, inputs, etc. of interest. The richer the datasets,
the better the approximate controller will perform in a
variety of unseen conditions, but the higher the compu-
tational effort required to build the dataset and to train
the DNN. To address this, we followed an iterative
approach for building our dataset. We first defined a
bounded region of realistic values for states, inputs,
etc. Then, we started with a relatively compact dataset
of MPC solutions i.e.,
X
and
U
, sampled from the
complete region of operation and used these to fit a
DNN. Afterwards, we analyzed the performance on
a wide set of test points
X
val
within the desired re-
gion of operation but which are not included in
X
.
If the performance on
X
val
is not yet sufficient more
points were added thereby increasing the density of
X
, until the performance is sufficient. This was done
in ad-hoc manner since this paper focuses on the ap-
plications, but more thorough statistical analysis of
performance for training set size has been performed
in e.g. (Hertneck et al., 2018). We also used random
samples of states or trajectories through the operation
space. Through optimal design of experiments (DoE),
a more targeted choice could be made regarding this
trade-off, like in (Gupta et al., 2023; Chen and Peng,
2017).
3.2 Training Deep Neural Networks
A DNN is trained to fit the mapping from input dataset
X
to output dataset
U
. Various design choices can
be made, e.g., the type of network (DNN, possibly in
tandem with additional networks as classifiers), the
corresponding architecture and its hyperparameters.
Typically, the appropriate choice of the architecture
follows from the complexity of the considered use-
case.
In the most basic format, we consider a feedfor-
ward neural network, because of its general purpose na-
ture. The neural network architecture includes an input
layer with
N
x
input features,
N
layers
fully-connected
hidden layers each containing
N
hidden
neurons, and
an output layer with
N
u
output features representing
the control actions. All layers are fully connected. In
Approximating MPC Solutions Using Deep Neural Networks: Towards Application in Mechatronic Systems
73

between the layers, we use activation functions, e.g.,
ReLU or Tanh. A simple example of such a neural
network is shown in Figure 1.
Figure 1: A simple multi-layer feedforward neural network
mapping inputs to outputs.
We implement DNN models using Torch (Paszke
et al., 2019) and use the Adam optimizer (Kingma and
Ba, 2014) to optimize the weights and biases. The cost
function used to train the DNN is the mean squared
error between the output features in
U
and the model’s
predictions. After scaling the input and output datasets,
the training is ran for a number of epochs until the
fitting error is sufficiently low.
3.3 Deployment
After the DNN has been trained using the approach
in Sections 3.1 and 3.2, it can be deployed on the
machine controller. There it receives online measure-
ments and computes its approximate MPC control ac-
tions, thereby replacing the original MPC.
4 VALIDATION
In this section, we validate the proposed algorithm on
a range of use-cases:
•
An active-suspension system, where the suspen-
sion is controlled to optimize comfort, while sub-
ject to road variations. This is a simple linear case
to start with, with a relatively small timescale, and
a classical quadratic cost of states and control ac-
tions.
•
A parallel SCARA robot, executing energy-
optimal point-to-point motions while avoiding an
obstacle. This is a more complex case, with non-
linear dynamics, a lower time constant, and a finite
task to be completed.
•
A truck-trailer, which has to make a U-turn in a
tight space. This is an even more challenging case,
due to the non-linear dynamics, and since the (in-
teger) numbers of reversals is not the same for all
possible turns.
The performance difference between the two ap-
proaches can be addressed on multiple fronts:
•
Performance in terms of cost and constraints. The
results can be compared to the original MPC ones,
initially on training data to study the impact of
fitting errors, and then on validation data.
•
Computational efficiency. The goal of the ap-
proach is to reduce the computational effort re-
quired during run-time. Nevertheless, the proposed
method requires an increased pre-calculation cost
for building the training set and training the net-
work. Here we use the needed calculation time
for both, but ideally this should be done based on
FLOPS.
For each of the examples, we assume all states are
measurable without noise and / or disturbances. In
practice, it can be needed to add estimators to obtain
these, like for most MPC implementations.
4.1 Active-Suspension System
In this section, we consider the active suspension use-
case. The suspension system can be controlled to
manage the vertical movement of the car. Unlike pas-
sive suspension systems, which rely on fixed springs
and dampers, active suspension systems are able to
adjust in real-time to the road conditions and driving
dynamics, thereby improving passenger comfort. The
considered system is modeled as a quarter car, shown
schematically in Figure 2. It consists of a car body and
a suspension, driving on a given road.
Figure 2: The considered quarter car with active suspension.
The system has 5 states:
x =
x
body
v
body
x
susp
v
susp
x
road
∈ R
5
,
and 2 inputs:
u =
u
susp
v
road
∈ R
2
,
where
x
,
v
and
u
denote displacement, speed and input
force respectively. The linear dynamics are given in
ODE format as:
˙x
road
= v
road
,
˙x
body
= v
body
,
˙x
susp
= v
susp
,
˙v
body
=
1
m
body
(−F
susp
+ u
susp
)),
˙v
susp
=
1
m
susp
(+F
susp
− u
susp
+ F
road
)),
(3)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
74
where:
F
susp
= d
susp
(v
body
− v
susp
) + k
susp
(x
body
− x
susp
),
and:
F
road
= d
tire
(v
road
− v
susp
) + k
tire
(x
road
− x
susp
).
The model parameters are shown in Table 1.
Table 1: Model parameters for the active suspension.
Parameter Value Unit Description
m
body
625 kg
Body mass (25%)
m
susp
320 kg
Mass of
suspension
d
susp
0 Ns/m
Damping constant
of suspension
d
tire
3755 Ns/m
Damping constant
of wheel and tire
k
susp
80000 N/m
Spring constant
of suspension
k
tire
125000 N/m
Spring constant
of wheel and tire
The control goal of the MPC is to minimize the
displacement of the car body,
x
body
, by controlling
u
susp
. Therefore, the cost function (Eq. 2a) is set to:
J = w
x
i=N
∑
i=1
x
body
(i)
2
+ w
u
i=N
∑
i=1
u
susp
(i)
2
.
Scalar weights
w
x
∈ R
and
w
u
∈ R
trade off the two
cost functions: minimization of displacement and in-
put regularization respectively. The constrains are
given by:
•
Initial condition: x
1
= x
current
, i.e., the initial state
of the optimization problem is set to the current
state of the system.
• Input constraint: −3000 ≤ u
susp
≤ 3000.
We consider a sampling time of 0.04 s and an MPC
horizon of 0.2 seconds (
N
= 5 samples). A forward
Euler integrator is used to integrate the dynamics. The
MPC receives preview of the road profile (
x
road
and
v
road
) 5 samples ahead.
After setting up the MPC, it is run for a grid of con-
ditions to construct input dataset
X
to output dataset
U, which contain the following features:
•
The input features are selected as the 5 states at the
current sample, and 5 samples ahead (preview) of
v
road
.
•
A single output feature is considered: the next
sample of u
susp
.
In total, 1000 MPC solutions are generated by varying
the input features as follows:
•
The first 4 states are excited at
−0.3 0 0.3
,
and the last state at
−0.1 0 0.1
.
•
The road profile,
v
road
, is excited at
−3 0 3
for each of the samples.
Note that a full factorial sampling grid is considered,
but that the coverage is relatively sparse. Due to the
linear dynamics of the system, the model trained next
performs well at intermediate points, removing the
need for additional intermediate samples in the training
data.
The considered neural network is designed as a
feed-forward neural network consisting of 2 fully
connected hidden layers with 20 neurons each, with
ReLU activation functions. After training, a root-mean-
squared error of 18 N is achieved on the training data
(0.85%) Next, the result is tested / deployed for a given
road profile with a length of 50 samples (10 times the
MPC horizon), and benchmarked with the MPC so-
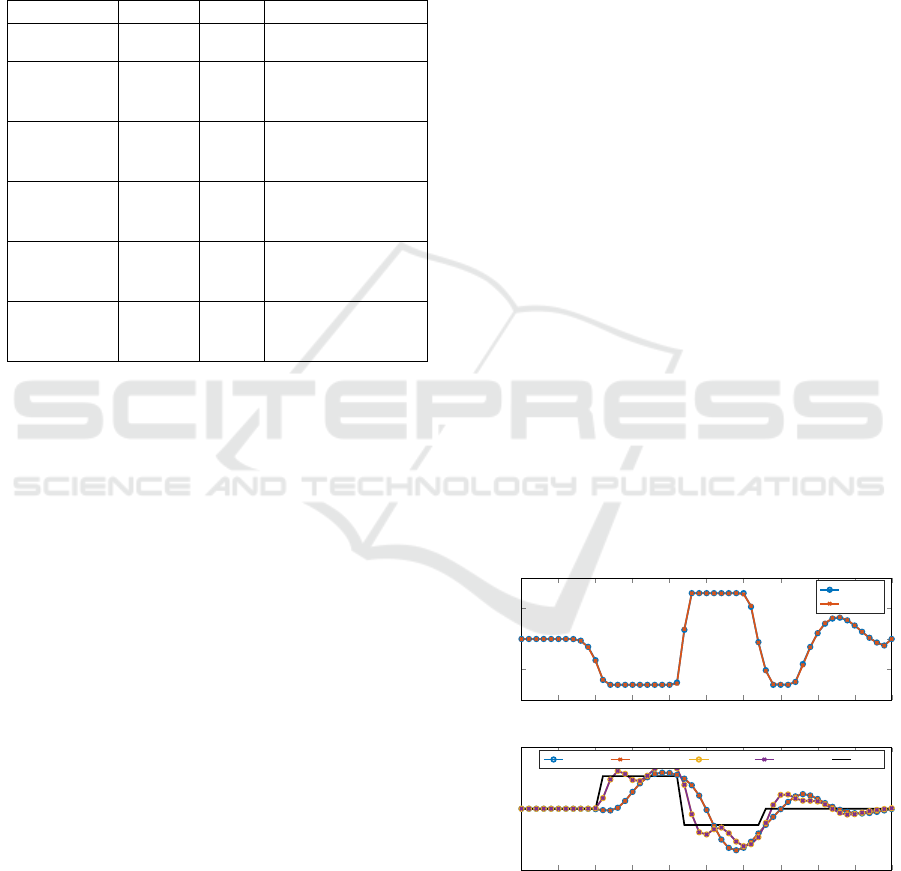
lutions. In Figure 3, the results are shown. It can
be seen that the solution of the proposed approach
closely matches that of the original MPC, also if the
input constraints are active. In terms of the cost, the
original MPC has a cost of 0.127, while the MPC-
approximation has a 0.5 percent higher cost. Regard-
ing evaluation time: evaluating the original MPC takes
33 ms per iteration, while the proposed A-MPC ap-
proximation only requires 0.5 ms per iteration, which
is limited by our non real-time operating system and
is expected to be significantly faster on a typical em-
bedded controller.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−4,000
−2,000
0
2,000
4,000
Time [s]
Force [N]
MPC
A-MPC
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
−0.15
0.15
Time [s]
Displacement [m]
MPC (b) A-MPC (b) MPC (s) A-MPC (s) Road
Figure 3: Validation on a given road profile. (b) denotes the
body, (s) denotes the suspension.
Approximating MPC Solutions Using Deep Neural Networks: Towards Application in Mechatronic Systems
75

4.2 Parallel SCARA
In this section, we consider a parallel SCARA robot,
shown in Figure 4. Such a system is often used for
pick-and-place or assembly operations, where high
speed and accuracy are required. The considered sys-
tem is driven by two motors, and controls the location
of an end-effector. The system has non-linear dynam-
ics and is MIMO, making it challenging to control.
Figure 4: The considered SCARA setup.
The system is driven by two motors (left and right),
yielding motor torques u =
T
le f t
T
right
∈ R
2
, and
controls the position of an end-effector, yielding states
x =
x
ee
˙x
ee
y
ee
˙y
ee
∈ R
4
. In this paper, we con-
sider a simulation study, based on a model designed
using ROBOTRAN (Docquier et al., 2013). For the
sake of brevity, we refer to (Singh et al., 2024) for the
detailed model equations.
For this case, the control goal of the MPC is to con-
duct a point-to-point motion, from a given initial end-
effector state (x
init
=
x
init
0 y
init
0
) to a final
end effector state (x
end
=
x
end
0 y
end
0
), while
minimizing the required input torque. Therefore, the
cost function (Eq. 2a) is set to minimize the torques:
J =
i=N
∑
i=1
T
le f t
(i)
2
+
i=N
∑
i=1
T
right
(i)
2
. (4)
The constrains are given by:
•
Initial condition: x
1
= x
current
, i.e., the initial state
of the optimization problem is set to the current
state of the system. For the first sample of the task,
x
1
= x
init
.
•
Obstacle avoidance: the end-effector has to stay
outside of a given constraint surface: a circle with
a radius of 0.05 m, illustrated later.
There is also the constraint to ensure the robot reaches
the desired target x
end
at the end of the task length,
which is 0.25 s. To do so, we re-solve the MPC every
sample with a sampling time of 0.0025 s, and as the
task is executed, each time, the length of the MPC
horizon
N
is decreased by 1, going from 100 initially
down to 1 as the task is completed.
We consider the following features for input dataset
X to output dataset U:
•
The input features are selected as the current states
x
current
, the desired final positions of the end-
effector,
x
end
and
y
end
, and finally also the (integer)
number of samples until the end of the total task
horizon. This last feature provides a notion of how
many samples are left until the end of the task.
•
Two output features are considered: the motors
torques T
le f t
and T
right
.
The datasets
X
and
U
are constructed by varying
the initial and final condition (end-effector positions)
of the point-to-point motion. We vary the initial and
final x-position between -0.23 and 0.23 m in 8 steps.
Similarly, we vary the y-position between 0.20 and
0.34 m in 8 steps, yielding a number of 4096 config-
urations. Each of the configurations has a task length
of 100 samples, so in total we have 409600 MPC so-
lutions. All trajectories, including the obstacle, are
visualized in Figure 5 where it can be seen that the
training data covers the region of interest densely.
Figure 5: The generated trajectories, including the obstacle.
Again, we consider a feed-forward neural network,
but in this case it consists of 2 fully connected hid-
den layers with 150 neurons, with ReLU activation
functions. After training, a root-mean-squared error of
0.14 Nm is achieved on the training dataset.
In order to test the proposed approach we consider
two cases. First, we will consider an initial and final
point within the training data. Second, we consider an
intermediate point, to investigate how well the algo-
rithm extrapolates to unseen conditions.
The first case considers
x
init
= 0
.
23,
y
init
= 0
.
28
and
x
end
=
−
0
.
23,
y
end
= 0
.
2, which are direct mem-
bers of the training data. With respect to the cost
function, the original MPC has an RMS torque of 0.82
Nm and the A-MPC an RMS torque of 0.83 Nm.
The second case considers
x
init
=
−
0
.
13,
y
init
=
0
.
33 and
x
end
= 0
.
13,
y
end
= 0
.
23. In this case, the
initial and final conditions are placed relatively far way
from the grid points in the training dataset, aiming to
investigate how well the proposed algorithm general-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
76
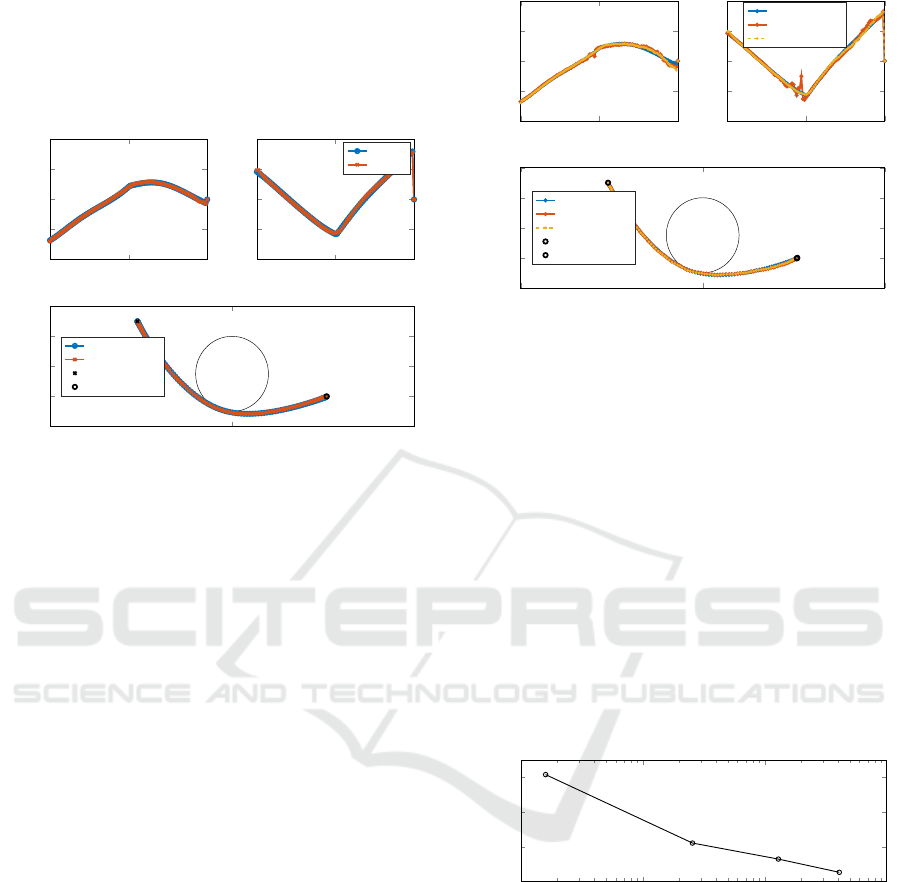
izes to unseen data. In Figure 6, the results are shown.
In the figure, it can be seen that the solutions are still
very similar. With respect to the cost function, the
original MPC has an RMS torque of 0.660 Nm and the
A-MPC an RMS torque of 0.662 Nm.
0
0.125 0.25
−10
−5
0
5
10
Time [s]
Torque (left) [Nm]
0
0.125 0.25
−10
−5
0
5
10
Time [s]
Torque (right) [Nm]
MPC
A-MPC
−0.25
0
0.25
0.19
0.23
0.27
0.31
0.35
x-position [m]
y-position [m]
MPC
A-MPC
Initial condition
Final condition
Figure 6: Result for conditions outside the training set.
Next, we study the effect of measurement noise on
the performance. To do so, a white noise disturbance
is added to the states (magnitude of 0.5 mm (position)
and 1 mm/s (velocity) respectively). For each of the
controllers, the same noise profile is applied. The
results are shown in Figure 7. The following observa-
tions are made:
•
When noise is added, both the MPC as well as the
A-MPC deviate from the original solution.
•
The obtained input / displacement profiles are rel-
atively similar, but the input signal of the MPC
has more oscillations (especially when it nears the
circular constraint). The A-MPC does not display
this effect, since these effects were not accounted
for in the training data.
•
The computed costs for both solutions are the same,
0.665 Nm. However, both solutions do slightly vio-
late the constraints. This will be further dealt with
in future work: by designing an MPC robust to
noise, and by training an A-MPC on the resulting
solutions.
Regarding evaluation time: evaluating the original
MPC takes 40 ms per iteration (on average), while the
MPC approximation only requires 0.5 ms per iteration
(as before limited by our non real-time system). Hence,
the original MPC is on average 16 times slower com-
pared to the sampling time of the system (and thereby
does not meet the real-time requirements), compared
to the proposed approach which is 5 times faster. Note
however that it took approximately 4 hours to generate
the dataset and train the model used for the A-MPC.
0
0.125 0.25
−10
−5
0
5
10
Time [s]
Torque (left) [Nm]
0
0.125 0.25
−10
−5
0
5
10
Time [s]
Torque (right) [Nm]
MPC (no noise)
MPC (noise)
A-MPC (noise)
−0.25
0
0.25
0.19
0.23
0.27
0.31
0.35
x-position [m]
y-position [m]
MPC (no noise)
MPC (noise)
A-MPC (noise)
Initial condition
Final condition
Figure 7: Result for conditions outside the training set, in-
cluding noise.
To arrive at the presented A-MPC performance, we
applied the iterative training data generation approach
from Section 3.1. We varied the initial and final
x
and
y
positions in either 2, 4, 6 or 8 steps, yielding
increasingly rich training data sets of 16, 256, 1024
and 4096 trajectories, respectively. After each data set
generation we analyzed the root-mean-squared error
of the torques predicted by the A-MPC obtained on
those versus those of the original MPC, on a different
validation dataset, and increased the number of steps
further if accuracy was not yet sufficient. The result
is shown in Figure 8. In the figure, we can see that
denser input space sampling (and more trajectories in
the training dataset), yields better performance on the
validation set, as is to be expected.
10
1
10
2
10
3
10
4
0
1
2
3
Number of trajectories in training dataset [-]
RMSE (validation) [Nm]
Figure 8: Trade-off between the number of trajectories in the
dataset and the fitting performance on a validation dataset.
4.3 Truck-Trailer
The last case considered in this paper is a truck-trailer,
which has to make a U-turn. Depending on the avail-
able space, it can sometimes be needed to make a
number of speed reversals, but not always. An exam-
ple without reversal is shown in Figure 9, and one with
one speed reversal in Figure 10. For the latter, the
truck moves from a given initial condition with the
truck oriented to the top of the page, to a final con-
dition with it oriented down, while subject to space
Approximating MPC Solutions Using Deep Neural Networks: Towards Application in Mechatronic Systems
77
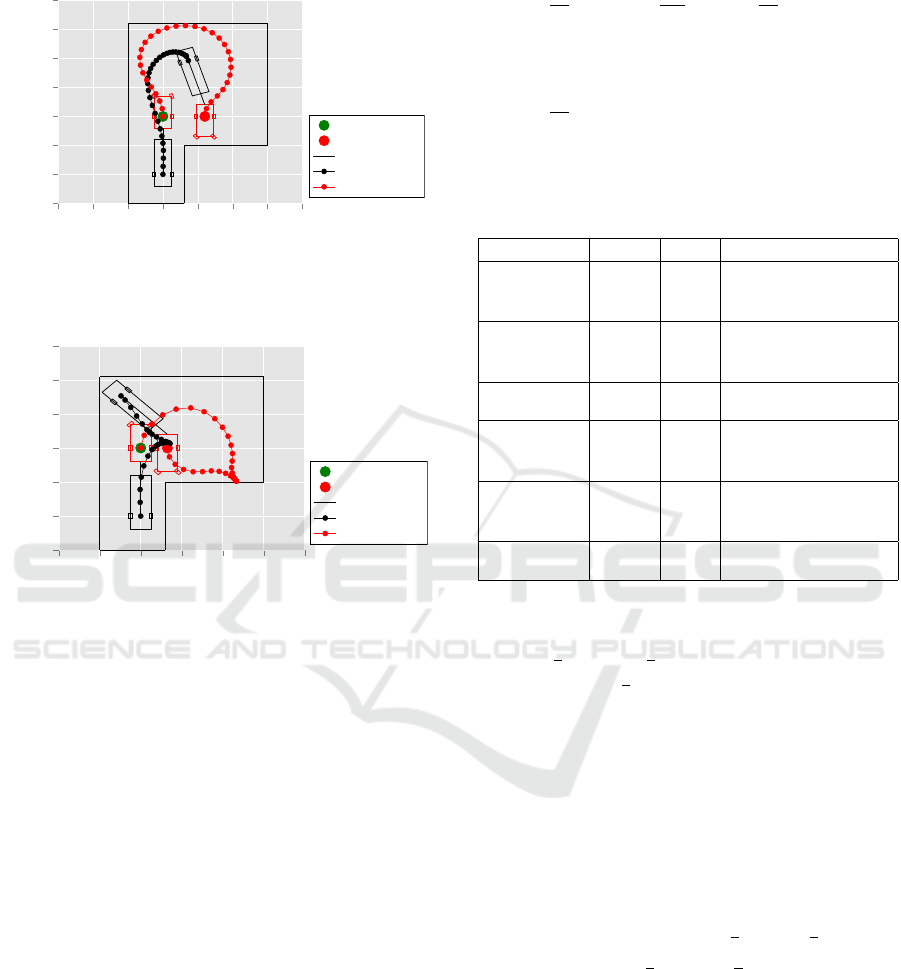
constraints.
−15
−10
−5
0
5
10
15
20
−15
−10
−5
0
5
10
15
20
x-position [m]
y-position [m]
Initial condition
Final condition
Constraints
Trailer (MPC)
Truck (MPC)
Figure 9: Example of paths for truck and trailer when per-
forming a U-turn without a speed reversal.
−10 −5 0 5 10 15 20
−15
−10
−5
0
5
10
15
x-position [m]
y-position [m]
Initial condition
Final condition
Constraints
Trailer (MPC)
Truck (MPC)
Figure 10: Example truck-trailer paths with one speed rever-
sal.
In contrast to the previous use-cases discussed in
this paper, we do not consider an MPC which is solved
at each time step in the horizon. Instead, we construct
a model that is able to predict the ideal trajectory (cov-
ering the entire horizon) at once. We do this since
in reality we would then let an external path-tracking
controller track the path, not an MPC, which is left out
of scope for this paper.
The system has 4 states:
x =
θ
b
x
a
y
a
θ
a
∈ R
4
,
and 2 inputs:
u =
δ
a
v
a
∈ R
2
,
where
x
and
y
denote displacements in their respective
direction,
v
the velocity,
θ
denotes the heading and
δ
the steering angle input. Subscript (
·
)
a
denotes the
truck, and subscript (·)
b
the trailer.
The non-linear dynamics are given in ODE format
as:
˙
θ
b
=
v
a
L
b
sin(β
ab
) −
M
a
L
b
cos(β
ab
)
v
a
L
a
tan(δ
a
),
˙x
a
= v
a
cos(θ
a
),
˙y
a
= v
a
sin(θ
a
),
˙
θ
a
=
v
a
L
a
tan(δ
a
),
(5)
where
β
ab
=
θ
a
− θ
b
. The model parameters are shown
in Table 2.
Table 2: Model parameters for the truck-trailer.
Parameter Value Unit Description
L
a
3.5 m
Truck: axle
to axle distance
M
a
2 m
Truck: distance
of hitch behind axle
W
a
2.5 m
Truck: width
L
b
8 m
Trailer: axle to
hitch distance
M
b
2 m
Trailer: distance of
axle to rear wall
W
b
2.5 m
Trailer: width
For this case, the control goal is to conduct
a point-to-point motion, from a given initial state
(x
init
=
π
2
0 0
π
2
) to a final state (x
end
=
(·) x
end
0 −
π
2
). Note that the final trailer an-
gle θ
b
is left free.
The considered cost function is to minimize:
J =
i=N
∑
i=1
˙v
2
a
,
so the motion is completed in as smooth a manner as
possible. We consider the following constraints:
•
Initial and final condition, as mentioned previ-
ously.
• Steering angle constraint: −
π
4
≤ δ
a
≤
π
4
.
• Relative angle: −
π
2
≤ β
ab
≤
π
2
.
• Truck speed: −3 ≤ v
a
≤ 3.
•
Space constraints:
y
a
< y
max
,
y
b
< y
max
,
x
a
> −
5,
x
b
< −5.
To solve the optimal control problem, we consider a
sampling time of 1 s and a total task length of
N
= 30
samples. We solve the entire task at once.
In order to generate the input and output dataset,
we vary
x
end
∈ R
between 3.25 and 6 m in 12 steps and
y
max
∈ R
between 8 and 16 m in 33 steps, yielding 396
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
78
solutions in total. The resulting truck trajectories (x
a
and y
a
) are visualized in Figure 11. All solutions start
from an initial condition of 0 in
x
- and
y
-direction. It
can be seen that some solutions have 0 speed reversals,
whereas other solutions have 1. Sometimes, the speed
reversal occurs towards the beginning of the trajectory
(causing the truck to move in negative
y
-direction) and
sometimes towards the end. The amount of turns is af-
fected by the settings
y
max
and
x
end
, further illustrated
later on in this section.
Using this data, we then define the following fea-
tures that will be used for training the A-MPC:
•
Input features:
x
end
,
y
max
. Note that some of the
initial and final states are fixed (eg also
x
end
varies)
and thus omitted from the dataset, but in general
these would also need to be included as input.
•
Output features: the truck trajectories (with length
N) x
a
∈ R
N
, y
a
∈ R
N
, v
a
∈ R
N
.
−6 −4 −2 0 2 4 6 8 10 12 14
−10
0
10
20
x-position [m]
y-position [m]
Figure 11: The trajectories of the truck, used for training.
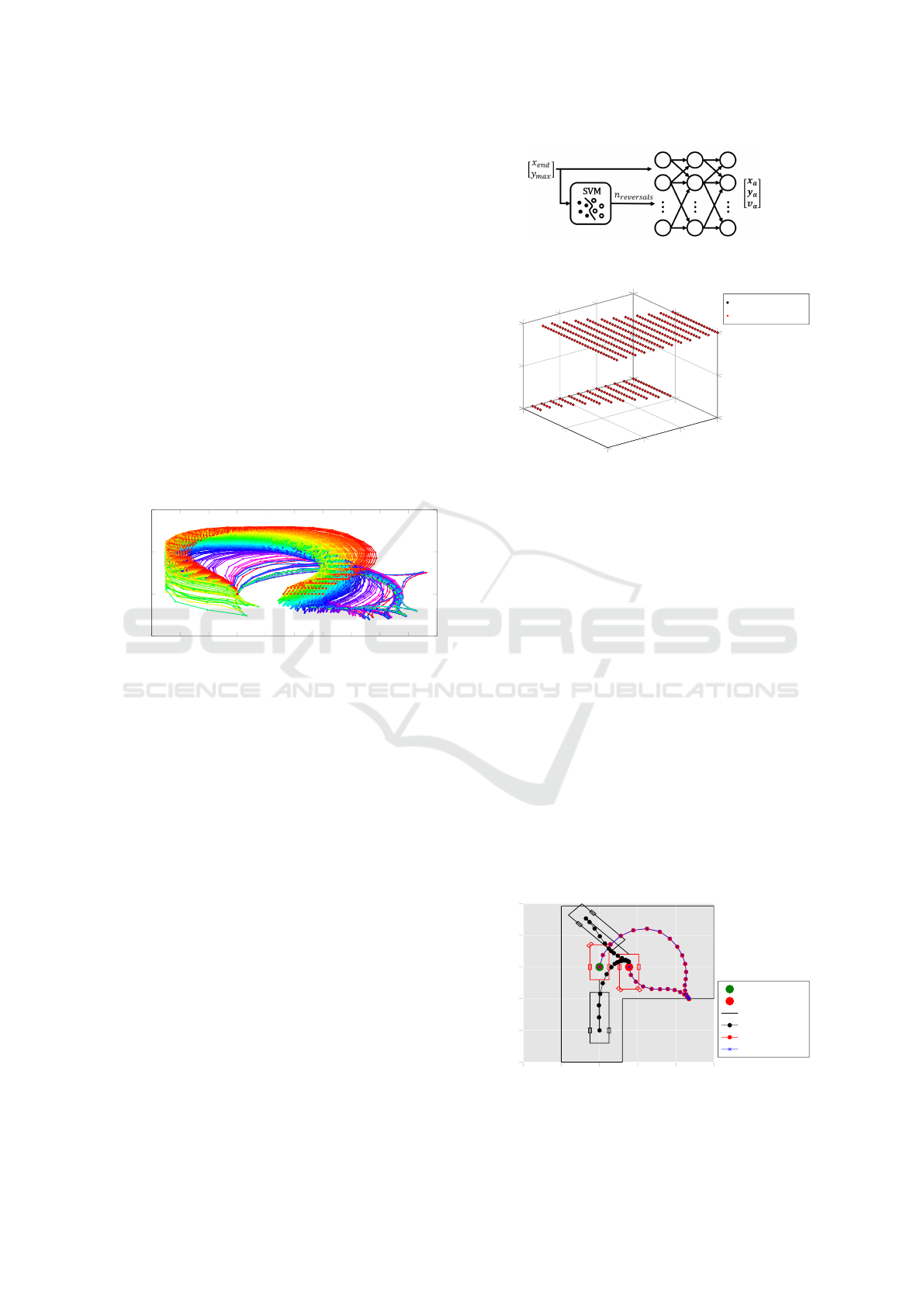
An extra feature that is relevant here is the (inte-
ger) number of speed reversals (0 or 1)
n
reversals
∈ N
.
This makes the path planning problem a mixed integer
control problem. Rather than solving this using deeper
networks (Karg and Lucia, 2018), or using stochastic
(Bernoulli) layers (Okamoto et al., 2024), we augment
the neural network with a separate classifier.
To do so, we have chosen a binary classifier to first
predict the number of speed reversals, based on input
features:
x
end
and
y
max
. Hereby, for simplicity, this is
done using a support-vector machine (SVM), employ-
ing an RBF kernel. In another application use of neural
network classifiers could be preferred. The predicted
n
reversals
by this classifier is used as an input to the next
part of our A-MPC, which is a feed-forward neural
network, consisting of 2 fully connected hidden layers
with 1500 neurons, with ReLU activation functions.
The overall interconnection is shown in Figure 12.
The result of this SVM is shown in Figure 13. For
the training set, it is able to perfectly predict the num-
ber of speed reversals.
Regarding the neural network, it converges to a
root-mean-squared error of 0.017 m for the displace-
Figure 12: The interconnection of the neural network and
SVM.
3
4
5
6
8
12
16
0
0.5
1
x
end
[m]
y
max
[m]
Amount of reversals [-]
Reversals (true)
Reversals (pred.)
Figure 13: The amount of speed reversals (true and pre-
dicted), based on the input features.
ment in
x
- and
y
-direction (0.25%) and 0.003 m/s for
the truck velocity (0.23%) on the training data.
Next, the approach is first validated on a trajectory
for one of the grid points in the training data:
y
max
=
16 m,
x
end
= 6 m. For this case, no speed reversals are
present, not in the optimal solution used for training
and also not in the approximation. With respect to the
trajectories in
x
- and
y
-direction, a root-mean-squared
error of 0.01 m is achieved. Next, we consider a tra-
jectory within the same ranges for
y
max
and
x
end
, but
not on any of the grid points used for training, with
y
max
= 9.625 m,
x
end
= 3.875 m. Now there is one
speed reversal for the approximation, which matches
the outcome of the optimal solution that we find when
we calculate it for validation (but this was not used
for training), as shown in Figure 14. In this case, the
root-mean-squared error is small as well: 0.02 m.
Regarding computational effort: solving the MPC
takes on average 3 seconds, whereas inference of the
DNN requires only 3 milliseconds.
−10 −5 0 5 10 15
−15
−10
−5
0
5
10
x-position [m]
y-position [m]
Initial condition
Final condition
Constraints
Trailer (MPC)
Truck (MPC)
Truck (A-MPC)
Figure 14: Validation on conditions outside the training set.
Approximating MPC Solutions Using Deep Neural Networks: Towards Application in Mechatronic Systems
79

5 CONCLUSION
We have shown application of an approximate MPC
technique on several challenging mechatronics cases.
It relies on supervised learning, to train DNNs to match
MPC examples. This allows to pre-calculate the MPCs,
and thereby reduces the computational load at runtime.
This makes this approach very usable for cases with
complex or non-linear dynamics and/or small time
constants, for which classical MPC would otherwise
typically not be realistic. We have illustrated the versa-
tility of the approach by applying it to several different
examples. We have also shown the workflow for how
to tailor the approach for each of those examples, in-
cluding extensions for handling finite tasks and mixed
integer control problems.
We have worked in a pragmatic manner, but in the
future will work on (i) a thorough stochastic analysis
of training set and optimality or feasibility, allowing
to give stronger validations or even verifications of
the A-MPC, (ii) more targeted procedures to generate
training data, and (iii) different architectures, wherein
approximations are used alongside classical methods,
for example like in (Chen et al., 2022) where an MPC
is given a feasible initialization using an efficient ap-
proximation.
While we have only reported needed training time
and inference time, it is interesting for future work
to study the ecological impact, tradeing off increased
pre-processing cost with the reduced run-time cost like
done in (Lacoste et al., 2019).
ACKNOWLEDGMENT
This research was supported by: Flanders Make, the
strategic research centre for the manufacturing indus-
try in Belgium, specifically by its DIRAC SBO and
LearnOPTRA SBO research projects, and the Flemish
Government in the framework of the Flanders AI Re-
search Program (https://www.flandersairesearch.be/en)
that is financed by EWI (Economie Wetenschap & In-
novatie).
REFERENCES
Adamek, J. and Lucia, S. (2023). Approximate model predic-
tive control based on neural networks in a cloud-based
environment. In 2023 9th International Conference
on Control, Decision and Information Technologies
(CoDIT), pages 567–572. IEEE.
Andersson, J. A., Gillis, J., Horn, G., Rawlings, J. B., and
Diehl, M. (2019). Casadi: a software framework for
nonlinear optimization and optimal control. Mathemat-
ical Programming Computation, 11(1):1–36.
Bemporad, A., Morari, M., Dua, V., and Pistikopoulos, E.
(2000). The explicit solution of model predictive con-
trol via multiparametric quadratic programming. In
Proceedings of the 2000 American Control Conference.
ACC (IEEE Cat. No.00CH36334), volume 2, pages
872–876 vol.2.
Biegler, L. T. and Zavala, V. M. (2009). Large-scale nonlin-
ear programming using ipopt: An integrating frame-
work for enterprise-wide dynamic optimization. Com-
puters & Chemical Engineering, 33(3):575–582.
Chen, S., Saulnier, K., Atanasov, N., Lee, D. D., Kumar, V.,
Pappas, G. J., and Morari, M. (2018). Approximat-
ing explicit model predictive control using constrained
neural networks. In 2018 Annual American Control
Conference (ACC), pages 1520–1527.
Chen, S. W., Wang, T., Atanasov, N., Kumar, V., and Morari,
M. (2022). Large scale model predictive control with
neural networks and primal active sets. Automatica,
135:109947.
Chen, Y. and Peng, C. (2017). Intelligent adaptive sampling
guided by gaussian process inference. Measurement
Science and Technology, 28(10):105005.
Docquier, N., Poncelet, A., and Fisette, P. (2013). Robotran:
a powerful symbolic gnerator of multibody models.
Mechanical Sciences, 4(1):199–219.
Gupta, S., Paudel, A., Thapa, M., Mulani, S. B., and Wal-
ters, R. W. (2023). Optimal sampling-based neural
networks for uncertainty quantification and stochas-
tic optimization. Aerospace Science and Technology,
133:108109.
Hertneck, M., Köhler, J., Trimpe, S., and Allgöwer, F.
(2018). Learning an approximate model predictive
controller with guarantees. IEEE Control Systems Let-
ters, 2(3):543–548.
Hose, H., Brunzema, P., von Rohr, A., Gräfe, A., Schoellig,
A. P., and Trimpe, S. (2024). Fine-tuning of neural net-
work approximate mpc without retraining via bayesian
optimization. In CoRL Workshop on Safe and Robust
Robot Learning for Operation in the Real World.
Karg, B. and Lucia, S. (2018). Deep learning-based embed-
ded mixed-integer model predictive control. In 2018
European Control Conference (ECC), pages 2075–
2080.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kvasnica, M., Löfberg, J., and Fikar, M. (2011). Stabilizing
polynomial approximation of explicit mpc. Automatica,
47(10):2292–2297.
Lacoste, A., Luccioni, A., Schmidt, V., and Dandres, T.
(2019). Quantifying the carbon emissions of machine
learning. arXiv preprint arXiv:1910.09700.
Lucia, S. and Karg, B. (2018). A deep learning-based ap-
proach to robust nonlinear model predictive control.
IFAC-PapersOnLine, 51(20):511–516. 6th IFAC Con-
ference on Nonlinear Model Predictive Control NMPC
2018.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
80

Lucia, S., Navarro, D., Karg, B., Sarnago, H., and Lucía, O.
(2021). Deep learning-based model predictive control
for resonant power converters. IEEE Transactions on
Industrial Informatics, 17(1):409–420.
Maddalena, E., da S. Moraes, C., Waltrich, G., and Jones,
C. (2020). A neural network architecture to learn ex-
plicit mpc controllers from data. IFAC-PapersOnLine,
53(2):11362–11367. 21st IFAC World Congress.
Nubert, J., Köhler, J., Berenz, V., Allgöwer, F., and Trimpe,
S. (2020). Safe and fast tracking on a robot manipu-
lator: Robust mpc and neural network control. IEEE
Robotics and Automation Letters, 5(2):3050–3057.
Okamoto, M., Ren, J., Mao, Q., Liu, J., and Cao, Y. (2024).
Deep learning-based approximation of model predic-
tive control laws using mixture networks. IEEE Trans-
actions on Automation Science and Engineering.
Parisini, T. and Zoppoli, R. (1995). A receding-horizon regu-
lator for nonlinear systems and a neural approximation.
Automatica, 31(10):1443–1451.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., DeVito,
Z., Raison, M., Tejani, A., Chilamkurthy, S., Steiner,
B., Fang, L., Bai, J., and Chintala, S. (2019). Pytorch:
An imperative style, high-performance deep learning
library. In Advances in Neural Information Processing
Systems 32, pages 8024–8035. Curran Associates, Inc.
Pozzi, A., Moura, S., and Toti, D. (2022). A neural network-
based approximation of model predictive control for a
lithium-ion battery with electro-thermal dynamics. In
2022 IEEE 17th International Conference on Control
& Automation (ICCA), pages 160–165. IEEE.
Qin, S. J. and Badgwell, T. A. (2003). A survey of industrial
model predictive control technology. Control engineer-
ing practice, 11(7):733–764.
Rawlings, J. B. (2000). Tutorial overview of model predic-
tive control. IEEE control systems magazine, 20(3):38–
52.
Singh, T., Mrak, B., and Gillis, J. (2024). Real-time model
predictive control for energy-optimal obstacle avoid-
ance in parallel scara robot for a pick and place applica-
tion. In 2024 IEEE Conference on Control Technology
and Applications (CCTA), pages 694–701. IEEE.
Summers, S., Jones, C. N., Lygeros, J., and Morari, M.
(2011). A multiresolution approximation method for
fast explicit model predictive control. IEEE Transac-
tions on Automatic Control, 56(11):2530–2541.
Vanroye, L., Sathya, A., De Schutter, J., and Decré, W.
(2023). Fatrop: A fast constrained optimal control
problem solver for robot trajectory optimization and
control. In 2023 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), pages 10036–
10043. IEEE.
Winqvist, R., Venkitaraman, A., and Wahlberg, B. (2021).
Learning models of model predictive controllers using
gradient data. IFAC-PapersOnLine, 54(7):7–12. 19th
IFAC Symposium on System Identification SYSID
2021.
Zhang, X., Bujarbaruah, M., and Borrelli, F. (2019). Safe
and near-optimal policy learning for model predictive
control using primal-dual neural networks. In 2019
American Control Conference (ACC), pages 354–359.
Approximating MPC Solutions Using Deep Neural Networks: Towards Application in Mechatronic Systems
81
