
Enhancing PI Tuning for Plant Commissioning Using Transfer Learning
and Bayesian Optimization
Boulaid Boulkroune, Joachim Verhelst, Branimir Mrak, Bruno Depraetere and Joram Meskens and
Pieter Bovijn
Flanders Make vzw, Oude Diestersebaan 133, 3920 Lommel, Belgium
fl
Keywords:
Controller Tuning, Transfer Learning, Bayesian Optimization, Thermal Plant.
Abstract:
A novel approach for accelerating the auto-tuning of PI controllers during the commissioning phase is pro-
posed in this study. This approach combines transfer learning and Bayesian optimization (BO) to minimize
the number of iterations required to converge to the optimal solution. Transfer learning is employed to extract
valuable information from available historical data derived from expert tuning of other equivalent process vari-
ants. In the absence of historical data, a simulation model can also be utilized to generate data from different
model variants (e.g., changing the value of unknown parameters). In this study, a simulation model is used
for generating historical data. The approach’s efficiency is demonstrated through its application to a thermal
plant, achieving a significant reduction in the number of iterations required to reach the optimizer’s optimal
solution.
1 INTRODUCTION
Proportional-Integral-Derivative (PID) controllers are
the most commonly used controllers in industrial pro-
cesses, despite the availability of numerous advanced
controller variants in academia. The popularity of
these controllers can be attributed to their simplicity,
robustness, ease of use, and the fact that they do not
require model knowledge. Numerous manual tuning
methods involve monitoring the process response fol-
lowing adjustments to the controller setpoint are pro-
posed. However, PID tuning remains a tedious and
time-consuming process, and it is generally very diffi-
cult to achieve optimal performance when done man-
ually.
Several auto-tuning approaches have been pro-
posed in the literature with the aim of automating the
process of selecting appropriate controller parameters
(for instance, (Aidan, 2006), (Liuping, 2017), (Ho
et al., 2003)). Broadly speaking, these methodologies
can be classified into data-driven and model-based
approaches. Data-driven controller design (see, for
instance, (Bazanella et al., 2011)) offers the advan-
tage of not requiring prior model knowledge. Notable
works in this area include Virtual Reference Feedback
Tuning (VRFT) (Campi et al., 2002), Fictitious Refer-
ence Iterative Tuning (FRIT) (Hjalmarsson, 1998), It-
erative Feedback Tuning (IFT) (Kaneko et al., 2005),
a one-step tuning scheme for a 2DOF control system
(Kinoshita and Yamamoto, 2018), and step response-
based methods (Sanchis and Pe
˜
narrocha-Al
´
os, 2022).
While data-driven PID tuning approaches offer nu-
merous advantages, they are not without their draw-
backs. These drawbacks include data dependency,
limited generalization to diverse operating conditions,
sensitivity to noisy data, and the risk of overfitting
when the process diverges from the data distribution.
The second category consists of model-based ap-
proaches, which include a variety of techniques. For
more in-depth information, readers are referred to
sources such as (Boyd et al., 2016) and related ref-
erences. Model-based methods demonstrate their full
potential when accurate models are available. How-
ever, in practice, developing precise and robust mod-
els is often difficult due to the lack of practical and
comprehensive descriptions of uncertainties (Gevers,
2002).
An alternative solution is to use a hybrid approach
that combines data-driven and model-based methods,
as proposed in (Fujimoto et al., 2023). This ap-
proach is formulated within the Bayesian optimiza-
tion framework, where the process model is used to
define the prior mean function. While promising, the
effectiveness of this approach heavily depends on the
accuracy of the underlying model. Inaccurate models
may lead to convergence toward local minima, par-
Boulkroune, B., Verhelst, J., Mrak, B., Depraetere, B., Meskens, J. and Bovijn, P.
Enhancing PI Tuning for Plant Commissioning Using Transfer Learning and Bayesian Optimization.
DOI: 10.5220/0013712600003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 235-242
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
235
ticularly if the optimization process emphasizes ex-
ploitation over exploration. A similar approach is pro-
posed by (Boulkroune et al., 2024), where the method
utilizes both process model knowledge and Bayesian
optimization capabilities. Initially, the model is re-
fined by identifying unknown or uncertain parame-
ters. The improved model is then used in simula-
tions to search for an optimal configuration of the PI
controller. The results obtained—including the initial
estimate, upper and lower bounds, and the Gaussian
process mean—are subsequently used to initialize the
Bayesian optimization process during the commis-
sioning phase. By properly initializing the Bayesian
optimization, the number of iterations required to
reach the optimizer’s optimal solution can be signifi-
cantly reduced.
In (Reynoso-Meza et al., 2014), a hybrid multi-
objective optimization method for tuning PI con-
trollers is introduced, with a particular focus on
reliability-based optimization scenarios. The study
employs Monte Carlo simulations to quantitatively
evaluate performance degradation of the controller
due to unforeseen or unmodeled system dynamics.
The utilization of a multi-objective framework adds
a level of complexity for users, requiring proficiency
in multi-objective optimization techniques.
Other auto-tuning approaches have been proposed
based on reinforcement learning (RL), where con-
troller parameters are adjusted through a training pro-
cess (see, for example, (Lu et al., 2017), (Doerr et al.,
2017)). These methods exploit RL’s capacity to learn
optimal control policies through interaction with the
environment, making them well-suited for dynamic
and uncertain systems. In contrast, the approach in
(Shipman, 2021) focuses on training a combination of
value and policy functions, rather than directly tun-
ing controller gains. This strategy aims to enhance
controller stability and performance by optimizing the
underlying decision-making process. Overall, these
advanced auto-tuning techniques present promising
solutions for improving the performance and reliabil-
ity of PI controllers across a range of industrial ap-
plications. However, they also introduce added com-
plexity and demand a deeper understanding of opti-
mization and machine learning principles.
In this paper, we present an approach similar to
that of (Boulkroune et al., 2024), incorporating sev-
eral key enhancements. We assume the availability
of historical data, which may either originate from
other processes or be generated through simulation
models. The simulation data can come from different
model variants, offering a diverse set of insights. To
extract valuable knowledge from this historical data,
we employ the two-stage transfer learning approach
proposed in (Li et al., 2022). This method is particu-
larly effective in managing the complementary nature
of source tasks (historical data) and system dynamics
during the knowledge aggregation process, thereby
facilitating more efficient information transfer across
different tasks. The proposed approach is tested using
data from a thermal plant setup. The collected exper-
imental data, which was originally gathered for dif-
ferent purposes, is fitted to a Gaussian Process (GP)
model. This model serves as a surrogate for the actual
plant, eliminating the need for additional costly and
time-consuming experiments. Additionally, a simpli-
fied thermal model is used to generate historical data
by varying the values of some unknown parameters
(e.g., cupper mass) within specified ranges.
This paper is organized as follows: In Section 2,
we introduce the preliminary concepts and define the
problem. Section 3 presents the main approach, fo-
cusing on how it accelerates the PI controller tuning
process during the commissioning phase. Section 4
demonstrates the application of this approach to auto-
tune a PI controller for a thermal plant. Finally, Sec-
tion 5 provides the conclusions and summarizes the
key takeaways from the study.
2 PRELIMINARY AND PROBLEM
FORMULATION
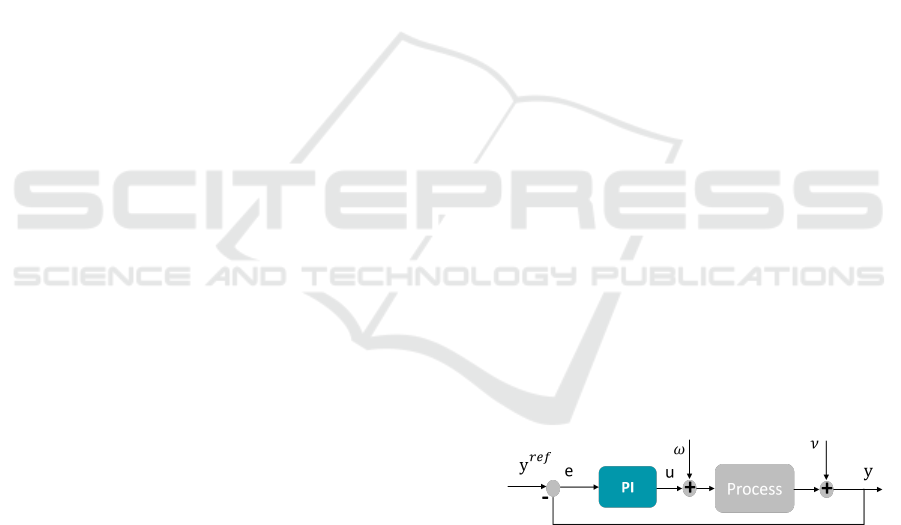
The auto-tuning of a PI controller in a real plant is the
focus of this paper. A simple scheme of the PI con-
troller is shown in Fig. 2. The signal y
re f
is the refer-
ence or set point to be tracked. u and y are respectively
the input and output of the process. ω represents the
process perturbation, and ν denotes the measurement
noise. e = y
re f
− y is the tracking error.
Figure 1: PI controller.
The PI controller has the following structure:
u
t
=K
p
e(t)+ K
I
Z
e(t)dt (1)
where K
p
and K
i
represents the proportional and inte-
gral gains. An anti-windup measure is also considered
to ensure the actuator constraints.
To tune the controller gains (K
p
and K
i
), we need
to define a cost function based on the desired track-
ing performance of the PI controller (i.e., overshoot,
settling time, integral absolute error (IAE), integral
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
236
time absolute error (ITAE), etc.). In this paper, a lin-
ear combination of commonly used control key per-
formance indicators (KPIs): settling time, overshoot,
and IAE is defined in the following equations:
J
θ
=a
1
Osh(θ) + a
2
St(θ) + a
3
IAE(θ) (2)
where a
i
,i = 1 : 3, are known and constant weights. θ
is a vector that contains the control parameters. Osh
and St are the overshoot and settling time, respec-
tively. IAE represents the Integrated Absolute Error
and is given by: IAE =
R
∞
0
| e(t) | dt.
This specific set of KPIs is chosen to cover typ-
ical dynamic responses of interest, such as settling
when changing references (settling time), minimizing
error to reference (IAE), and limiting overshoot, as
many thermal plants are particularly sensitive to very
low overshoot. The weights are selected to provide
a quantifiable performance from the step response,
based on qualitative evaluation by a plant expert.
The auto-tuning PI controller is now formulated
as a black-box multi-objective optimization problem
given by:
min
θ
J
θ
s.t. θ = [K
p
,K
I
],θ
up
≤ θ ≤ θ
l p
(3)
θ
up
and θ
l p
are respectively the upper and lower
bounds of each element in the vector θ. The primary
objective at this juncture is to find the optimal solution
for the challenging optimization problem (3). Given
the absence of a closed-form expression for the ob-
jective function and its expensive evaluation (or sam-
pling), the Bayesian optimization approach emerges
as the most appropriate choice. The costly nature of
objective function evaluation is attributed to the in-
tended tuning on the actual process during the com-
missioning phase. In Figure 2, we illustrate the ex-
ecution of the optimization framework using the BO
approach. Due to space limitations, we refrain from
providing in-depth technical details about the BO op-
timization approach. Readers seeking a comprehen-
sive explanation are encouraged to refer to the rele-
vant literature, such as (Garnett, 2023), for a more
detailed understanding. Unfortunately, even though
the BO approach is a promising technique, its perfor-
mance faces efficiency challenges due to the limited
number of configuration evaluations possible within
a constrained budget. Moreover, incorporating avail-
able historical data is not straightforward. This prob-
lem is very challenging, mainly due to the difficulties
in extracting source knowledge from available data
and aggregating and transferring this knowledge to
the new target domain. In the literature, this prob-
lem is primarily addressed in hyper-parameter opti-
mization, with some interesting solutions proposed.
Figure 2: BO-based PI controller auto-tuning, where i indi-
cates a closed-loop experiment with controller parameters
θ
i
.
For instance, (Perrone et al., 2019) suggested limiting
the search space of the optimized process (target task)
to sub-regions extracted from historical data. In (Li
et al., 2022), a different two-phase transfer learning
framework for automatic hyper-parameter optimiza-
tion is proposed, which can simultaneously handle the
complementary nature among source tasks and dy-
namics during knowledge aggregation. This solution
is adopted in this paper to accelerate the Bayesian op-
timization framework, and the approach will be pre-
sented in the next section.
3 ACCELERATE THE PI TUNING
IN COMMISSIONING PHASE
USING TRANSFER LEARNING
In this section, we explain how to use transfer learn-
ing technique for accelerating the auto-tuning of a
PI controller in the commissioning phase. Without
loss of generality, it is assumed that historical data is
available or can be generated from existing simulation
models. Indeed, data can be generated from variants
of the same model by altering the values of unknown
or uncertain parameters. For instance, if you have a
simulation model with several parameters whose ex-
act values are not known, you can create different
scenarios by systematically varying these parameters
within plausible ranges. This process allows you to
explore a wide range of possible outcomes and gen-
erate a diverse datasets. Additionally, this approach
provides a richer set of data that captures the variabil-
ity and uncertainty inherent in real process.
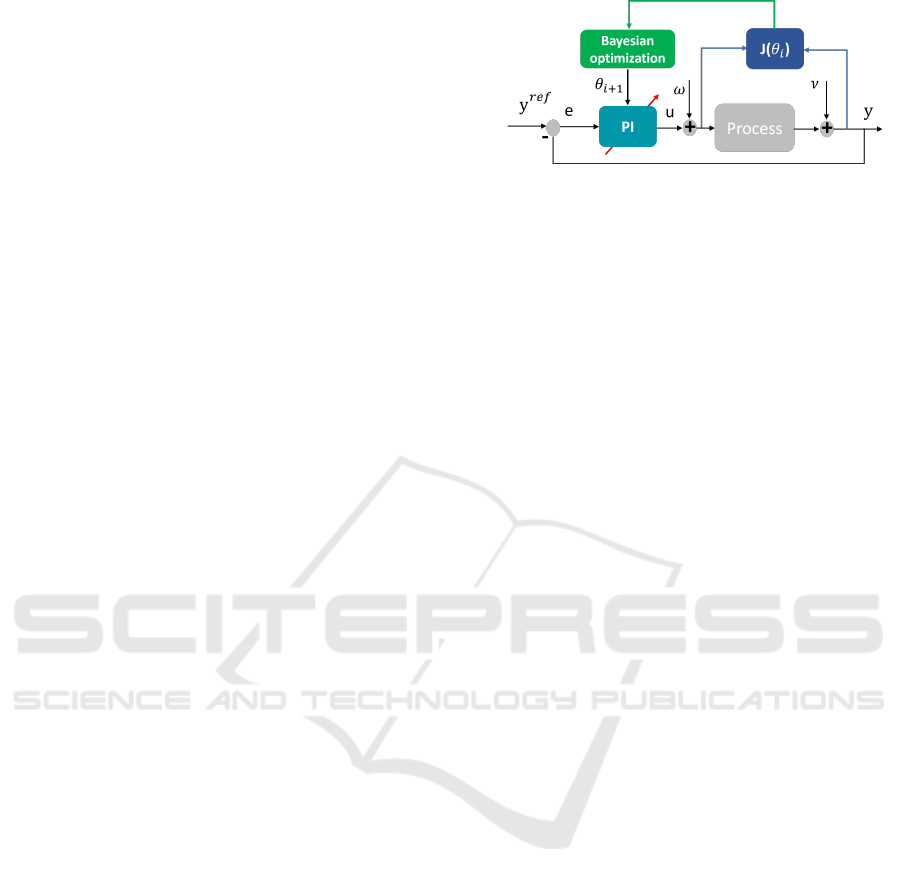
The transfer learning is conducted using the ap-
proach proposed by (Li et al., 2022) and illustrated
in Fig. 3. This approach addresses two main chal-
lenges. The first challenge is how to tackle the
complementary nature among source tasks and ex-
tract source knowledge cooperatively. To solve this,
TransBO builds a source surrogate by combining base
surrogates from multiple source tasks using learned
weights. This phase ensures that the complementary
Enhancing PI Tuning for Plant Commissioning Using Transfer Learning and Bayesian Optimization
237
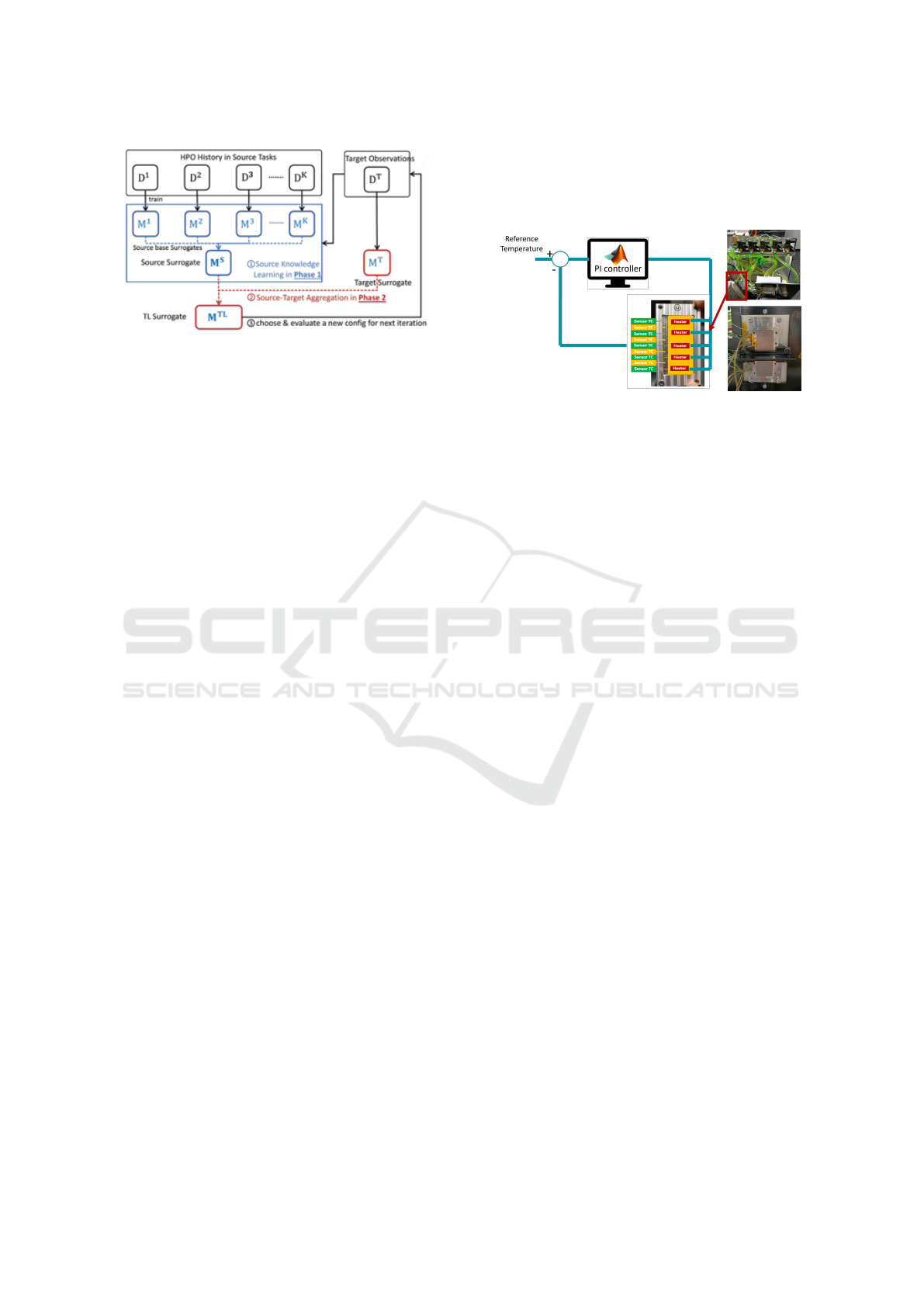
Figure 3: Two-Phase Transfer Learning Framework (Li
et al., 2022).
nature of different source tasks is utilized effectively.
The second challenge is how to handle knowledge
transfer as more target measurements become avail-
able. This is solved in a second phase, where the
source surrogate is combined with the target surro-
gate to form the final transfer learning surrogate. This
combination is done in an adaptive manner, allowing
the framework to balance between source and target
knowledge dynamically. TransBO learns the weights
for combining surrogates by solving constrained op-
timization problems with a differentiable ranking loss
function. This principled approach ensures that the
knowledge transfer is both effective and adaptive,
leading to better performance with fewer evaluations.
To maximize the generalization ability of the transfer
learning surrogate, TransBO uses cross-validation to
learn the aggregation weights. This helps in prevent-
ing overfitting and ensures that the surrogate model
remains robust.
4 AUTO-TUNING PI
CONTROLLER FOR A
THERMAL PLANT
4.1 Set-Up
As a practical use case a thermal plant setup has been
used to demonstrate and validate the tuning meth-
ods in a realistic environment, resembling on one end
cooling of powertrain components, and on the other
typical industrial plastic curing, and drying applica-
tions.
The setup shown in figure 4, consists of an alu-
minum plate split into five distinct zones each heated
by a cartridge heater of 113W, which is in turn pow-
ered by a solid-state relay (SSR) applying a PWM 0-
220 V DC. Next to the heating, each of the zones is
also actively cooled on the back end by liquid cooling
through a cooling channel using water-glycol. The
valves on the entry of each of the five cooling chan-
nels allows for opening and closing, while the speed
controllable pump, enables flow control through the
opened channels.
Figure 4: Experimental setup: thermal plant.
The thermal measurements are recorded by a to-
tal of nine (9) thermocouples, glued into each of the
five aluminum zones, but also the boundary between
each two zones. The thermocouples are calibrated to
+-1C accuracy. The fluid temperature are measured
by Pt100 sensors on input/output coolant lines. Addi-
tionally, pressure across the setup and the flow rate of
the water glycol are measured, both for safety and for
validation purposes.
All the controls and measurements are interfaced
to a Beckhoff I/O stack connected over EtherCAT to
a Xenomai Triphase real-time target. The base sam-
pling time of the control loop is Ts = 1ms while the
sensor measurements are logged at Tmeas = 100ms,
which is deemed sufficient for a rather slow thermal
process. This allows for rapid prototyping of control
code in Simulink and easy integration to test environ-
ment in MATLAB.
4.2 Thermal Plant Model
As mentioned in 3, a model is needed for calculating
the initial condition and the upper and lower bounds
of the controller gains before running the BO with
the real plant in the commissioning phase. The used
model is a physics-based white box model with dy-
namic of heat dissipation, convection losses and heat
exchange between different components. This plant
model is excited by multiple disturbances and evalu-
ated in a closed loop simulation with a feedback con-
troller (PI).
4.2.1 Thermal Model Assumptions
The thermal plant model is a second order model,
consisting of two connected metal masses. The model
buildup and numerical evaluation was performed in
python. The thermal model under investigation in-
cludes the main modes of heat exchange between and
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
238

within the components:
• One block, ”mass 1 (copper)” is heated internally,
through direct heat injection. this is equivalent to
heating by an electric resistor inserted in this vol-
ume.
• A second block, ”mass 2 (aluminium)” is cooled
internally, driven by a cooling temperature and
given transfer area and heat transfer coefficient.
This is equivalent to cooling through a glycol-
water mixture, circulating at high throughput rate
through pipes in the volume).
• The two metal blocks (aluminium and copper)
are connected and do exchange (when at differ-
ent temperatures) heat by conduction through an
area of contact.
• Also, both blocks are in contact with surrounding
air and lose or gain thermal energy through con-
vection.
4.2.2 Model Structure
The model structure is as follows:
Two states are defined, representing the bulk cop-
per temperature (T
node,Cu
) and the bulk aluminum
temperature (T
node,Alu
). Heat injection and loss
(through cooling and resistive heating) and heat losses
or gains are injected directly into these states.
The node temperatures are updated every time
step using a backward Euler scheme, with the com-
bined energy inputs of each of the heat losses and
gains.
The heat gains and losses from heating dT
H
and
cooling dT
H
are a defined as:
dT
H,t−1→t
= Q
H
/m/cp ∗ dt
and
dT
C,t−1→t
= Q
C
/m/cp ∗ dt
whereby the heat gain Q
H
is driven directly by the
PI-controller, and
Q
C
= −(h
alu,C
∗ A
alu,C
∗U
alu,C
∗ (T
C,t
− T
alu
) ∗ dt)
As the two blocks have a different temperature and
are physically connected along area A, a heat flow
through conduction dT
othermat
will be induced. The
flux q
Alu,Cu
is a function of their respective temper-
atures and distance of bulk temperature nodes. The
joint temperature is defined as a function of to the per-
pendicular distances between the cooling and heating
nodes and the joint:
T
joint,t
=
T
cu
∗ k
alu
∗ L
node,alu
+ T
Alu
∗ k
cu
∗ L
node,cu
k
alu
∗ L
node,alu
+ k
cu
∗ L
node,cu
The resulting heat flow Q
Alu,Cu
depends on the
contact area and mass of the materials(s):
A
alu,cu
∗ q
Alu,Cu
= −A
alu,cu
∗ q
Cu,Alu
= (T
node,Alu
− T
joint,t
) ∗ cp
alu
∗ m
alu
∗ dt
On the other hand, heat loss to the environment
is modelled using conduction through a given surface
A
air
with thermal transmittance U
air
and T
ext
the exte-
rior temperature:
dT
air,t−1→t
= −(T
node,t−1
−T
ext
)∗A
air
∗U
air
/m/cp∗dt
The numerical values for the model parame-
ters and initial state are summarized in Table 1 of
(Boulkroune et al., 2024). For this analysis, these val-
ues are primarily held constant; however, they can be
made variable, and noise can be introduced into the
disturbance, input, and output signals.
4.3 Results and Benchmarking
Experiment description follows (see Figure 5). Each
experiment lasts for a total of 380 seconds. It begins
with a warmup to 25C for min relying on a well-tuned
PI parameters (this ensures consistency in compari-
son between different runs), followed by a bumpless
transfer of control parameters to the tested PI combi-
nation, so that the sudden change in integrator param-
eter does not create a large step in the output of the
controller. Finally, a step reference is applied at 140
seconds and is recorded for length of 120 seconds.
The experiment ends with a cool-down period of 120
seconds back to below 25C so that the next experi-
ment can be started. For the computation of the ob-
jective function, exclusively the data within the time
interval of 140 to 260 seconds is considered.
The description of how the experiments were re-
alized is illustrated in Figure 5. Each experiment lasts
for a total of 380 seconds. It begins with a warm-
up to 25°C for a few minutes, relying on well-tuned
PI parameters (this ensures consistency in compari-
son between different runs). This is followed by a
bump less transfer of control parameters to the tested
PI combination, so that the sudden change in the in-
tegrator parameter does not create a large step in the
output of the controller. Finally, a step reference is
applied at 140 seconds and is recorded for a length of
120 seconds. The experiment ends with a cool-down
period of 120 seconds back to below 25°C so that the
next experiment can be started. For the computation
of the objective function, exclusively the data within
the time interval of 140 to 260 seconds is considered.
In a previous study, we conducted a total of 256
experimental runs based on the procedure explained
earlier. Due to the significant time and financial costs
Enhancing PI Tuning for Plant Commissioning Using Transfer Learning and Bayesian Optimization
239
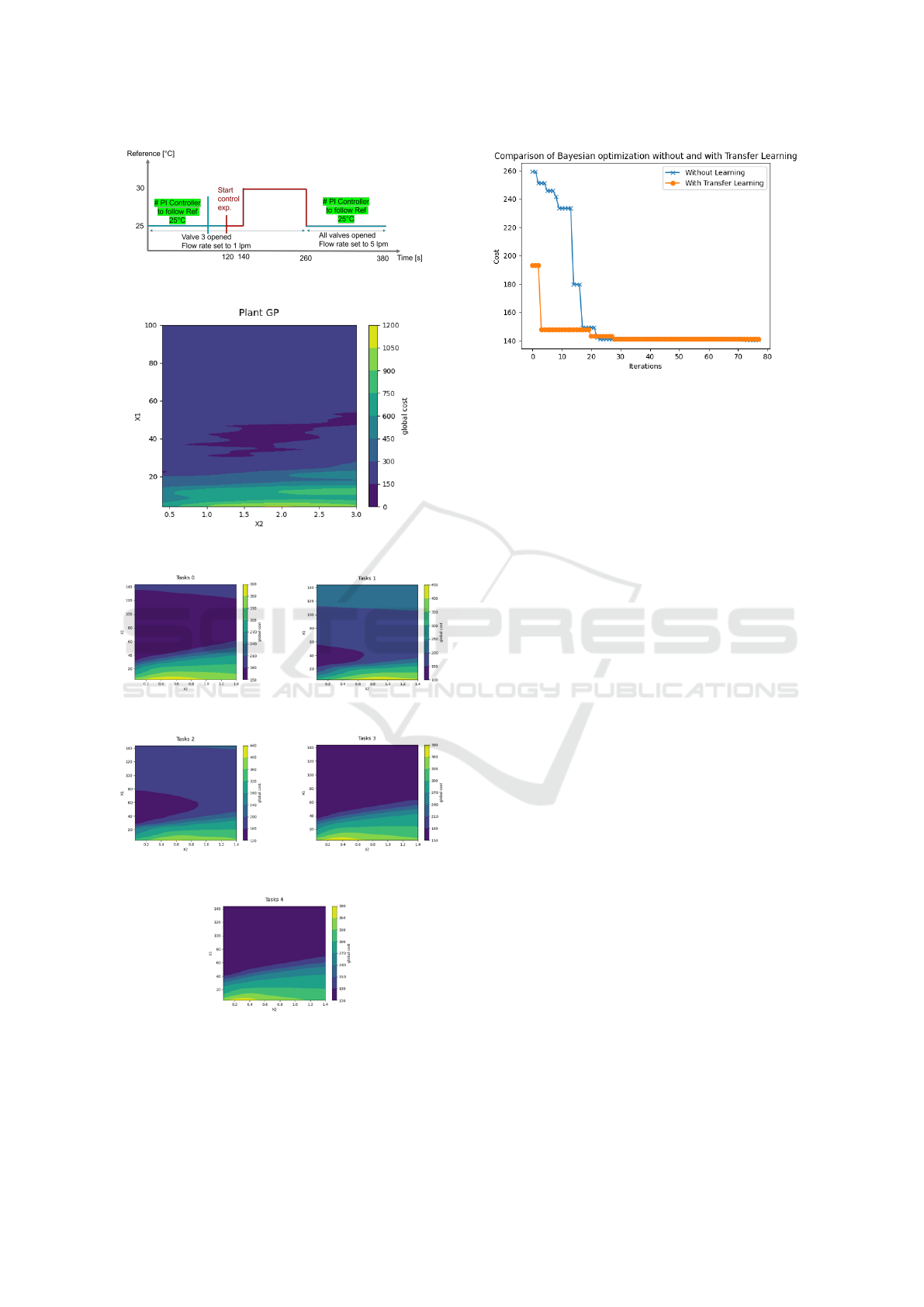
Figure 5: Experiment description.
Figure 6: Cost heat map.
(a) m
cu
= 0.5 ∗ ˆm
node,cu
(b) m
cu
= 0.75 ∗ ˆm
node,cu
(c) m
cu
= 1 ∗ ˆm
node,cu
(d) m
cu
= 1.25 ∗ ˆm
node,cu
(e) m
cu
= 1.75 ∗ ˆm
node,cu
Figure 7: Data generated from different thermal model vari-
ants.
Figure 8: Comparison of BO without and with transfer
learning.
associated with repeating these tests, we opted to uti-
lize the collected data by fitting it to a Gaussian Pro-
cess (GP) model. This model is then used as a sur-
rogate for the actual plant, thereby avoiding the need
for further costly and time-consuming experiments.
The cost heat map of the collected data is presented
in Figure 6. On the other hand, to compensate for the
lack of historical data, the presented thermal model
will be used for generating data. First, the unknown
parameters in the thermal model are identified using
a Bayesian approach. The main idea is to enhance
the model prediction capability by trying to iden-
tify as accurately as possible the unknown parame-
ters. It is both reasonable and non-limiting to assume
that the model parameters are identifiable. Alterna-
tively, it may be feasible to downsize the model, re-
taining only the identifiable sub-system whenever ap-
plicable. At this stage, acquiring experimental data
is essential to understand the true dynamics of the
plant and only one single experiment is required. It
is worth noting that the objective is not to get an
exceedingly precise model, but rather to achieve a
model of satisfactory accuracy, suitable for generat-
ing historical data from the model variants. These
variants can be obtained from the identified model
by varying the values of the identified unknown pa-
rameters within a specified ranges. Other alternatives,
if you have a simulation model with several parame-
ters whose exact values are not known, you can cre-
ate different scenarios by systematically varying these
parameters within plausible ranges. In our study,
the first approach is used. The mass of the cupper
(i.e,m
node,cu
) is the only unknown parameters identi-
fied and five (5) simulation data are obtained using
the values : 0.5 ∗ ˆm
node,cu
, 0.75 ∗ ˆm
node,cu
, 1 ∗ ˆm
node,cu
,
1.25 ∗ ˆm
node,cu
and 1.75 ∗ ˆm
node,cu
, where ˆm
node,cu
is
the identified parameter ( ˆm
node,cu
= 0.8262). The ob-
tained cost heat maps are presented in figure 7. This
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
240

data will be used as historical data for transfer learn-
ing purposes. As we can see, this data exhibits dif-
ferent optimal regions depending on the mass of the
cupper.
Instead of conducting a comparison with manual
tuning, we opted to employ another optimization ap-
proach: Bayesian Optimization (BO) without transfer
learning. For both BO techniques (with and without
transfer learning), we used the developed tool ’Open-
box’ by (Jiang et al., 2024), which is publicly avail-
able at
a
. For BO without transfer learning, the default
configuration was used (i.e, surrogate type =
′
gp
′
,
initial runs = 1, init strategy =
′
de f ault
′
). For
BO with transfer learning, the following configura-
tion was used: initial trials = 5, init strategy =
′
de f ault
′
, surrogate type =
′
tlbo topov3 gp
′
,
acq optimizer type =
′
random scipy
′
. The con-
sidered ranges (upper and lower bounds) for the
proportional gain (KP) and integral gain (KI) were
defined as [4,100] and [0.1,3], respectively. The ini-
tial guess is chosen as K
p0
= 89.96 and K
i0
= 0.2003
for both approaches.
The comparison results between BO with and
without transfer learning are shown in Figure 8. The
x-axis represents the number of iterations, while the
y-axis represents the cost. Evidently, the BO with
transfer learning achieves a convergence rate that is
76% faster than BO without transfer learning. A
notable performance obtained even considering the
moderate model prediction quality. There is poten-
tial for further enhancement in this percentage if ad-
ditional efforts are invested in refining the model pre-
dictions.To ensure a fair comparison between the two
optimization algorithms, it is advisable to run them
with several initial guess points. This approach helps
to mitigate the influence of any single starting point
on the optimization results, providing a more compre-
hensive evaluation of each algorithm’s performance.
By using multiple initial guesses, we can better as-
sess the robustness and effectiveness of the algorithms
across a broader range of scenarios. Due to time con-
straints, this will be done in the future, together with
direct application to the real thermal plant.
5 CONCLUSION
In this study, we proposed a novel approach to ac-
celerate the auto-tuning of PI controllers during the
commissioning phase. By combining transfer learn-
ing and Bayesian optimization, we aimed to minimize
the number of iterations needed to reach the opti-
mal solution. Transfer learning was utilized to extract
a
https://github.com/PKU-DAIR/open-box
valuable insights from historical data obtained from a
simulation model. The effectiveness of our approach
was demonstrated through its application to a thermal
plant, significantly reducing the number of iterations
required to achieve the optimizer’s optimal solution.
ACKNOWLEDGMENT
The research was supported by VLAIO under the
project HBC.2022.0052 Tupic-ICON performed in
Flanders Make.
REFERENCES
Aidan, O. (2006). Handbook of PI and PID Controller Tun-
ing Rules. Imperial College Press.
Bazanella, A. S., Campestrini, L., and Eckhard, D. (2011).
Data-driven controller design: The h
2
approach.
Springer Science and Business Media.
Boulkroune, B., Jordens, X., Mrak, B., Verhelst, J., De-
praetere, B., Meskens, J., and Bovijn, P. (2024). En-
hancing pi tuning in plant commissioning through
bayesian optimization. In ECC 2024, page
3220–3225.
Boyd, S., Hast, M., and
˚
Astr
¨
om, K. (2016). Mimo pid tun-
ing via iterated lmi restriction. Int. J. Robust Nonlin-
ear Control, 26:1718–1731.
Campi, M., Lecchini, A., and Savaresi, S. (2002). Vir-
tual reference feedback tuning: A direct method
for the design of feedback controllers. Automatica,
38(8):1337–1346.
Doerr, A., Nguyen-Tuong, D., Marco, A., Schaal, S., and
Trimpe, S. (2017). Model-based policy search for au-
tomatic tuning of multivariate pid controllers. arXiv.
arXiv:1703.02899.
Fujimoto, Y., Sato, H., and Nagahara, M. (2023). Controller
tuning with bayesian optimization and its accelera-
tion: Concept and experimental validation. Asian J
Control, 25:2408–2414.
Garnett, R. (2023). Bayesian Optimization. Cambridge
University Press, Cambridge, 1st edition.
Gevers, M. (2002). Modelling, identification and control,
page 3–16. Springer-Verlag.
Hjalmarsson, H. (1998). Control of nonlinear systems using
iterative feedback tuning. In Proceedings of the 1998
American Control Conference, page 2083–2087.
Ho, W., Hong, Y., Hansson, A., Hjalmarsson, H., and Deng,
J. (2003). Relay autotuning of pid controllers using
iterative feedback tuning. Automatica, 39(1):149–57.
Jiang, H., Shen, Y., Li, Y., Xu, B., Du, S., Zhang, W., Zhang,
C., and Cui, B. (2024). Openbox: A python toolkit for
generalized black-box optimization. Journal of Ma-
chine Learning Research, 25(120):1–11.
Kaneko, O., Soma, S., and Fujii, T. (2005). A new approach
to parameter tuning of controllers by using one-shot
Enhancing PI Tuning for Plant Commissioning Using Transfer Learning and Bayesian Optimization
241

experimental data - a proposal of fictitious reference
iterative tuning. In 16th IFAC World Congress, vol-
ume 38, page 626–631.
Kinoshita, T. and Yamamoto, T. (2018). Design of a data-
oriented pid controller for a two degree of freedom
control system. In 3rd IFAC Conference on Advances
in Proportional-Integral-Derivative Control PID, vol-
ume 51, page 412–415.
Li, Y., Shen, Y., Jiang, H., Zhang, W., Yang, Z., Zhang, C.,
and Cui, B. (2022). Transbo: Hyperparameter opti-
mization via two-phase transfer learning. In SIGKDD
2022.
Liuping, W. (2017). Automatic tuning of pid controllers
using frequency sampling filters. IET Control Theory
Appl, 11(7):985–95.
Lu, H., Shu-yuan, W., and Sheng-nan, L. (2017). Study and
simulation of permanent magnet synchronous motors
based on neuron self-adaptive pid. In 2017 Chinese
Automation Congress (CAC), page 2668–2672, Jinan,
China.
Perrone, V., Shen, H., Seeger, M., Archambeau, C., and Je-
natton, R. (2019). Learning search spaces for bayesian
optimization: Another view of hyperparameter trans-
fer learning. In Advances in Neural Information Pro-
cessing Systems, volume 32.
Reynoso-Meza, G., Sanchez, H. S., Blasco, X., and Vi-
lanova, R. (2014). Reliability based multiobjective
optimization design procedure for pi controller tuning.
In 19th World Congress, page 10263–10268.
Sanchis, R. and Pe
˜
narrocha-Al
´
os, I. (2022). A new method
for experimental tuning of pi controllers based on the
step response. ISA Trans., 128:329–342.
Shipman, W. (2021). Learning to tune a class of con-
trollers with deep reinforcement learning. Minerals,
11(9):989.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
242
