
Experimental Evaluation of Camouflage Effectiveness Against
Ground-Based Surveillance
Viktor Vitoul
a
, Jan Ivan
b
, Ladislav Potužák
c
Michal Šustr
d
and Barbora Hanková
e
Fire Support Department, University of Defence, Kounicova 65, Brno, Czech Republic
Keywords: Perception and Awareness, Thermal Imagining, Optical Sensors, Artillery Multidomain Operation,
Artillery Joint Fire Support, Military Camouflage, Military Equipment, Military Deception, Field Experiment,
Mechanical Sensors, Force and Tactile Sensors, Artillery, Image Processing.
Abstract: Camouflaging mortar firing positions represents a critical force protection measure in modern conflicts,
aiming to prevent enemy observation and subsequent destruction. The objective of this pilot study is to
evaluate the effectiveness of various camouflage techniques in concealing mortars, ammunition assets, and
support equipment from detection by selected ground-based reconnaissance means. The experimental phase
employed a range of artillery reconnaissance sensors, optical devices, and unaided visual observation. The
observed targets including mortar firing positions of various calibres and decoy positions were camouflaged
using different methods and levels of concealment, and deployed in terrain with varying vegetation density
and spatial characteristics. The detected differences in target visibility highlight the strengths and limitations
of individual observation methods depending on target characteristics and environmental conditions. The
findings of this pilot study offer practical recommendations for the effective camouflage of mortar units in
current operational environments.
1 INTRODUCTION
The current battlespace of multi-domain operations,
characterized inter alia by high-intensity sensor
surveillance and widespread deployment of
unmanned systems, imposes extraordinary demands
on unit protection—particularly in terms of
camouflage. Mortar units are especially vulnerable to
detection by enemy artillery reconnaissance assets,
notably during emplacement in firing positions and
while conducting fire missions (Sedláček et al., 2023;
Havlík et al. 2022). This vulnerability underscores the
necessity for rational planning and allocation of
defence resources under conditions of increasing risk
(Šlouf et al., 2023).
Each artillery discharge generates a visual,
acoustic, and thermal signature. The ongoing war in
Ukraine has demonstrated that the integration of
unmanned aerial vehicles (UAVs), thermal imaging
a
https://orcid.org/0009-0000-3624-7986
b
https://orcid.org/0000-0002-6194-8482
c
https://orcid.org/0000-0002-0213-717X
d
https://orcid.org/0000-0002-7342-7641
e
https://orcid.org/0009-0008-3444-591X
devices, and multi-sensor platforms with an efficient
kill chain can significantly increase the probability of
early target acquisition and
rapid destruction of firing
positions (Khoma, 2023; Ali et al., 2023). As a result,
camouflage has become one of the critical
components of artillery force protection.
With the ongoing advancement of technologies,
sophisticated command and control systems
(C2/C4ISR) are increasingly coming to the forefront.
These systems enable the real-time integration of
sensor data and significantly accelerate the decision-
making cycle (Amphenol Aerospace, 2023). Within
this framework, artificial intelligence (AI) is
beginning to assert its role, facilitating automated
object detection, behaviour prediction, and enhancing
the probability of identifying concealed targets
through machine learning methods (Beals, 2023).
Traditional camouflage techniques, when not adapted
to address these emerging threats, can be easily
Vitoul, V., Ivan, J., Potužák, L., Šustr, M. and Hanková, B.
Experimental Evaluation of Camouflage Effectiveness Against Ground-Based Surveillance.
DOI: 10.5220/0013712500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd Inter national Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 425-434
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
425

defeated in combination with image recognition
algorithms (Ali et al., 2023). Therefore, future
development of camouflage systems must be closely
aligned with advancements in AI, computer vision,
and predictive analytics, in order to maintain
operational effectiveness even in environments
characterized by intense digital reconnaissance
(Hughes, 2024). In future implementations,
integrating artificial intelligence and computer vision
into the decision-making process may significantly
enhance the reliability of camouflage assessment and
deployment, particularly by mitigating human error
and enabling automated terrain analysis from UAV
imagery.
Effective protection and concealment of artillery
units require a multi-faceted approach (Ivan et al.,
2022). Currently employed methods include natural
camouflage, technical camouflage systems (e.g.,
camouflage nets), the deployment of decoy firing
positions, and the implementation of "shoot and
scoot" tactics. The overarching objective of these
measures is to reduce the likelihood of unit detection
by enemy reconnaissance assets.
Minimization of visual reflections, suppression of
thermal and electromagnetic signatures, and
environmental adaptation of deployed units also play
a critical role in modern camouflage practices
(Khoma, 2023; Zhang et al., 2021). In contemporary
armed forces, camouflage often relies on traditional
methods (e.g., disruptive patterns, natural materials)
while simultaneously undergoing modernization. For
example, the introduction of the MAD21 camouflage
pattern is intended to enhance concealment in both
natural and urban environments (CZ Defence, 2022).
Parallel to these operational measures, scientific
methodologies have emerged to quantify camouflage
effectiveness. Notable research directions include the
evaluation of visual similarity between objects and
their surroundings based on human perception (Li et
al., 2022), the application of network analysis and
clustering algorithms (Kim, Yang & Kwon, 2021),
and the development of adaptive materials aimed at
reducing thermal signatures (Su & Zhao, 2023).
Advances in detection capabilities have been
driven by the evolution of deep neural networks
utilizing datasets such as MCAM (Hwang & Ma,
2024), and model architectures like MilDETR (Li et
al., 2024), CAMOUFLAGE-Net (Karthiga &
Asuntha, 2025), and YOLOv5/YOLOv7, which have
proven effective when deployed on UAV platforms
(Zeng et al., 2024).
Further studies have examined the impact of
visualization techniques on human decision-making,
particularly the risk of situational awareness
degradation due to excessive target highlighting.
When digital interfaces overemphasize objects
through colour, size, or motion observers may focus
disproportionately on marked elements and overlook
other critical aspects of the tactical environment
(Gardony et al., 2022).
Some lines of research draw inspiration from
biological mechanisms, such as mimicry, bionics, and
adaptive behaviour, which are being applied in the
development of next-generation camouflage systems
(Matthews et al., 2024). However, most of these
studies are conducted under laboratory or simulated
conditions. There remains a lack of experimentally
grounded research that evaluates the effectiveness of
camouflage techniques in real terrain settings and
against a broad spectrum of modern sensors
conditions that closely approximate the operational
battlefield.
This pilot study aims to address this research gap.
The primary objective is to assess the effectiveness of
selected camouflage and deception methods applied
to mortar units under conditions resembling current
combat environments. The study seeks to contribute
to a more comprehensive understanding of protection
strategies for artillery firing positions. At its core, this
research is based on a field experiment.
Based on the outlined context, the study was
designed to address the following research questions
(RQ):
RQ1: What is the difference in detection rates of
camouflaged positions depending on the applied
camouflage method?
RQ2: Which type of sensor is most successful in
detecting realistically camouflaged targets?
RQ3: Can decoy positions be effectively used as
part of a tactical approach to reduce detection
probability?
Drawing from existing knowledge, the working
hypothesis posits that natural camouflage will be
more effective than decoy positions in open terrain
when observed through optical means, while
camouflage nets are expected to perform less
effectively in the infrared spectrum. To test this
assumption, a null hypothesis (H₀) was formulated,
stating that there is no statistically significant
difference in detectability among the different types
of camouflage.
2 EXPERIMENTAL
FRAMEWORKS
This research responds to the current operational need
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
426

to verify the effectiveness of camouflage methods
under conditions that reflect the realities of today’s
sensor-saturated battlefield. Given the widespread
deployment of UAVs, thermal imaging, and
multisensory platforms that enable precise target
acquisition, it is essential to test whether traditional or
modernized camouflage techniques can effectively
reduce the likelihood of detection.
The experiment was designed as an initial pilot
phase of a broader research effort, aimed at
comparing the detectability of objects camouflaged
using various techniques within a selected operational
environment. In addition to measuring direct
detection rates, the study also assessed a range of
supplementary variables relevant to the operational
applicability of sensor systems:
Level of Confidence in Target Detection – a
subjective observer rating on a scale from 1 to 5
indicating the degree of certainty regarding the
correctness of target identification,
Subjective Evaluation of the Observation
System – including clarity of the image, ease of use,
and the observer’s perceived ability to distinguish
between targets,
Type of Detection Error – categorized as Type I
errors (false positives) or Type II errors (missed
detections of actual targets),
Observer Selection Behaviour – the order in
which participants chose specific sensor platforms for
target detection tasks.
The results of this pilot study are intended to
inform the design of a larger-scale experiment
focused on validating camouflage effectiveness
across different seasonal conditions and with an
expanded participant base. This step is essential for
generating repeatable data applicable to the
protection of mortar units operating in contemporary
combat environments.
3 MATERIALS AND METHODS
The primary objective of this study was to
experimentally verify the effectiveness of various
forms of camouflage for mortar firing positions under
realistic field conditions and to analyse their
resistance to detection by ground-based sensor
systems. A secondary objective was to record
variations in the detection rates of individual targets,
including the occurrence of Type I errors (false
positives) and Type II errors (missed detections), as
well as to assess the observers’ subjective confidence
in their detections when employing different types of
camouflage.
3.1 Materials
The parameters for the field experiment were derived
from actual equipment and structures commonly
associated with the operations of mortar units.
Emphasis was placed on creating a diverse set of
observed targets and camouflage configurations,
reflecting both standardized and improvised
concealment techniques typically employed during
real-world deployments.
3.1.1 Variables
The independent variable was the type of
camouflage applied to the target, categorized as
natural camouflage, camouflage netting, no
camouflage, and decoy position.
The dependent variables were: the detection rate
(expressed as a percentage), and the time required to
detect the target.
The controlled variables included: the distance
between the target and the observer, the time of day,
ambient light conditions, and the type of observation
post employed.
3.1.2 Sample Selection
The observation tasks were conducted by students
and members of the Czech Armed Forces (CAF)
representing various military specializations. A total
of 23 students from the Faculty of Military
Leadership participated in the experiment. A
purposive sampling strategy was employed to obtain
a representative sample of users familiar with real
military equipment and operational procedures. The
participants had no prior knowledge of the location or
type of camouflaged and decoy objects.
3.1.3 Environment and Conditions
The experiment was conducted on a designated
training range featuring natural vegetation with
gradual transition into light forest terrain.
Observations were carried out at varying distances
ranging from 150 to 400 meters, allowing the
simulation of dynamic battlefield conditions.
3.2 Methods
Data were recorded using standardized observation
forms, which included:
Fields for the type of detected object, the
observation system employed;
The observer’s confidence level (rated on a 1–
5 scale);
Experimental Evaluation of Camouflage Effectiveness Against Ground-Based Surveillance
427

The type of detection error (Type I – false
positive; Type II – omission of an actual
target);
The estimated distance to the target.
The forms were collected after each observation
block, digitized, and subsequently anonymized for
statistical processing.
For the statistical analysis, a combination of
descriptive and inferential statistical methods was
employed. Descriptive statistics included the
calculation of arithmetic means, standard deviations,
and variances for the observed variables.
To test for statistical associations, a chi-square
test was used to evaluate the relationship between the
type of camouflage and the detection rate.
Furthermore, a one-way analysis of variance
(ANOVA) was conducted to compare the
effectiveness of the different observation systems
employed in the experiment.
3.2.1 Observed Objects and Camouflage
Techniques
Figure 1: Tactical diagram of object positions with distance
scale within the experimental area.
A total of six objects representing either real or decoy
military targets were deployed within the observation
area, as illustrated in Figure 1. Each object employed
a different camouflage method:
1. Decoy light mortar position (81mm),
constructed using a black plastic tube simulating a
mortar barrel, with dimensions corresponding to a
real weapon system. The object was placed
approximately 180 meters from the observation post.
2. Command-type Vehicle, concealed under a
camouflage net, positioned at the edge of a forested
area. The vehicle represented a typical light tactical
automobile. The distance from the observer was
approximately 230 meters.
3. Supplementary Material commonly used at
firing positions, including ammunition crates and
packaging containers for transport and storage
purposes.
4. Medium Mortar Position (120mm), located
in a transition zone between forest and open terrain,
with a single crew member kneeling next to the
weapon system. The observation distance was
approximately 250 meters.
5. Camouflaged Medium Mortar Position
(120mm) in open terrain, utilizing natural vegetation
(grass cover) for concealment. The object was
situated at a distance of approximately 310 meters
from the observation point.
6. Decoy Medium Mortar Position, constructed
from natural materials (logs) cut and arranged to
simulate the dimensions of a real mortar system. The
decoy was placed at approximately 360 meters from
the observer.
An example of natural camouflage and the use of
a technical camouflage system is shown in Figure 2,
which depicts a camouflaged mortar concealed with
natural vegetation and a command-type vehicle
covered with a camouflage net.
Figure 2: Observed objects camouflaged using natural
materials and camouflage net.
3.2.2 Classification and Description of
Sensors
Due to the rapid advancement of technologies,
detection methods used for identifying and evaluating
the effectiveness of camouflage are continuously
evolving. The selection of detection platforms is
therefore a critical factor in the interpretation of results.
Findings from this study may serve as a foundation for
future improvements in military tactics and enhanced
protection against modern reconnaissance systems.
The following detection systems were employed
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
428

in the experiment, representing a spectrum of
platforms commonly available within the armament
of contemporary armed forces:
Human Eye – direct visual observation without
any optical support.
Aiming Circle (PAB-2A) – featuring
8× magnification and a 5° field of view; used for
general observation and orientation.
Standard Military Binoculars – 7×
magnification with a 7.5° field of view; suitable for
rapid terrain scanning and identification of large
targets.
Spotting Scope Meopta MeoStar S2 82 HD is
high-magnification (up to 70) optical device designed
for detailed observation of distant targets.
Thermal Scope HIKMICRO Falcon FH25 –
passive sensor for detecting heat signatures, enabling
observation regardless of lighting conditions. The is a
compact thermal monocular with a 384 × 288 px, 12
µm VOx sensor and thermal sensitivity of ≤ 20 mK.
It features a 25 mm lens, 8× digital zoom, and a
detection range of up to 1200 meters.
Multisensory Device MOSKITO – combines a
daylight optical channel (8× magnification, ~6° field
of view) and a thermal imaging sensor. In this
experiment, optical channel was used for visual target
identification.
Unmanned Aerial Vehicle (UAV) DJI Mavic 3
– equipped with a wide-angle camera and thermal
sensor; manually controlled by the operator without
automated data processing.
The human eye, as the most fundamental means
of sensory perception, was employed as the primary
tool for initial orientation and target acquisition.
Despite its limited range and dependence on ambient
lighting conditions, it remains a widely used method
for rapid detection of targets in natural terrain.
Subsequently, an aiming circle was utilized. This
instrument not only supports observation but also
enables azimuth determination. While it plays an
important role in the field orientation of artillery
units, it was less frequently used by participants
during the experiment.
A multisensory system combining optical and
thermal imaging capabilities provided a
comprehensive visual and thermal representation of the
target, including distance estimation. Its functionality
under reduced visibility and overall versatility made it
one of the most preferred detection tools.
For spatial situational awareness, an UAV
equipped with a camera and thermal sensor was
employed. The UAV was manually piloted by the
evaluator and enabled elevated-area observation
based on operator discretion. All flights were
conducted during daylight hours.
For detailed long-range observation, a spotting
scope with high optical magnification was used. It
enabled the identification of fine details that were not
easily discernible with standard optics, including
specific camouflage patterns and material structures.
A thermal scope was included in the sensor suite,
offering the advantage of detection based on thermal
radiation. It proved effective for revealing objects
concealed by vegetation or camouflage materials
especially targets such a humans and vehicles. Its
independence from ambient light conditions was a
significant benefit under reduced visibility.
The last tool included was a standard military
binocular, which was frequently used by
participants. It enabled the successful detection of
even well-concealed objects, including a vehicle
hidden at the forest edge.
3.2.3 Validity
To ensure repeatability and scientific validity, the
experiment was designed in such a way that it could
be replicated by other research teams under
comparable conditions. All scenarios, environments,
and configurations were meticulously documented.
Internal validity was supported through the use of a
controlled testing environment and standardized
instructions provided to all participants. External
validity was ensured by selecting test parameters that
closely reflect real-world operational deployment
scenarios of mortar units.
3.2.4 Observation Procedure and Applied
Methods
Each participant began the observation phase using
unaided vision, without any technical support.
Subsequently, participants were allowed to choose
the order in which to use the remaining observation
tools based on personal preference.
A maximum time limit of three minutes was allocated
for the use of each tool to ensure uniform exposure
and consistent use of observation time.
After using each detection system, participants
recorded their observations in a standardized
protocol, which included the following data fields:
Type of identified target (e.g., firing position,
vehicle, decoy, personnel, equipment);
Observation tool used;
Estimated distance to the target;
Confidence level in detection, on a 1–5 scale.
Experimental Evaluation of Camouflage Effectiveness Against Ground-Based Surveillance
429
The results indicate that participants likely
selected observation tools based on familiarity and
perceived ease of use:
Aiming circle was frequently chosen as the
second tool, possibly due to its simplicity of
operation;
Spotting scope dominated the third round of
selections, reflecting its strength in optical
magnification;
Multifunctional sensor systems were more
often used later in the process, suggesting a
preference for simpler tools in the early
evaluation stages;
Thermal scope was selected in the later
phases, likely due to their specialized
capability in detecting heat signatures;
UAV (drone) was most commonly deployed
last, likely for targeted final-stage
reconnaissance.
These conclusions are based on observed
selection order, not on direct participant feedback. A
comparison of detection success rates, error types,
and subjective evaluations of each observation
system is presented in Table 1.
Table 1: Sensor Preference Ranking Based on Participant
Selection.
Selection Order
Most
Frequently
Selected Tool
Percentage of
Respondents (%)
2nd Selection aiming circle 35
3rd Selection spotting scope 30
4th Selection MOSKITO 45
5th Selection thermal scope 30
6th Selection UAV 25
The table provides a comprehensive comparative
summary of individual observation systems in terms
of detection success, error rates, and subjective
reliability assessments. For each system, the table
presents the percentage of successfully detected
targets, the number of Type I errors (false detections),
Type II errors (missed actual targets), and the average
subjective confidence rating on a 1 to 5 scale.
The results reveal significant differences between
the systems - some exhibit high detection capability
and low error rates, while others are less reliable or
more demanding to operate. The table thus offers an
integrated comparison of both the technical
effectiveness and the practical usability of each
sensor under the conditions of a field experiment.
3.2.5 Detection Assessment
The evaluation of the detection capabilities of
individual systems was based on three key variables:
detection success (Yes/No), subjective confidence
level, and the classification of detection errors -
specifically, Type I errors (false identification of a
non-existent object) and Type II errors (failure to
detect an actually present target). Each entry in the
observation protocol was further analysed with
respect to the type of sensor used, the identified object
category, and the estimated distance to the target.
For comparison purposes, the data were
aggregated into a summary matrix tracking the
performance of each observation system. The matrix
includes:
Percentage of correctly detected targets;
Average subjective confidence rating (scale
1–5);
Frequency of Type I errors (false positives)
and Type II errors (missed detections);
Detection success rates across different target
types (e.g., actual firing positions, decoy
targets, camouflaged objects).
Table 2: Results of the comparison of individual
observation tools in terms of detection success, error rates,
and subjective reliability assessment.
Observation
Tool
Detection
Success
Rate (%)
Type I
Errors
Type
II
Errors
Subjective
Reliability
(1–5)
Human Eye 92 5 3 5
Aiming
circle
75 10 15 3
Spotting
Scope
80 8 12 4
MOSKITO 88 6 6 5
Thermal
scope
70 12 18 2
UAV 65 15 20 2
Binoculars 78 9 13 3
The results are evaluated using descriptive
statistics, specifically arithmetic mean and standard
deviation, and are compared both across observation
tools and across target types. This approach allows for
the identification not only of the overall effectiveness
of each system but also its limitations in specific
operational scenarios, such as lower confidence levels
when detecting naturally camouflaged targets or
higher false positive rates with decoy objects.
The analysis thus provides a quantitative basis for
comparing the detection efficiency of individual
sensors and enables an evaluation of the effectiveness
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
430
of different camouflage techniques from the
perspective of realistic operational application. A
summary of these key indicators is presented in Table
2, which facilitates a comprehensive comparison of
the observation systems in terms of reliability,
accuracy, and practical usability under field
conditions.
The table provides a comparative summary of
observation tools based on detection success, error
incidence, and subjective reliability ratings. For each
system, it reports the percentage of successfully
detected targets, the number of Type I errors (false
detections), Type II errors (missed actual targets), and
the average subjective rating on a 1 to 5 scale. The
results show clear distinctions between the tools -
some demonstrate high detection performance and
low error rates, while others are less reliable or more
demanding to operate.
This comparison enables a holistic evaluation of
both the technical efficiency and field-level
applicability of each sensor type in a live operational
test environment. While this study focused primarily
on detection success, future research will aim to
quantify additional camouflage performance
indicators, such as time-to-detection and targeting
accuracy, and assess their statistical correlation with
specific camouflage parameters.
4 RESULTS
Descriptive and inferential statistical methods were
employed to process the collected data. Descriptive
statistics were used to evaluate detection rates, error
types, and the average subjective confidence levels
reported by participants. To assess the statistical
significance of relationships between variables, the
chi-square test and one-way analysis of variance
(ANOVA) were applied. The analysis of results
considers both quantitative indicators and the
interrelation between the type of camouflage, the
observation device used, and the success rate of target
detection.
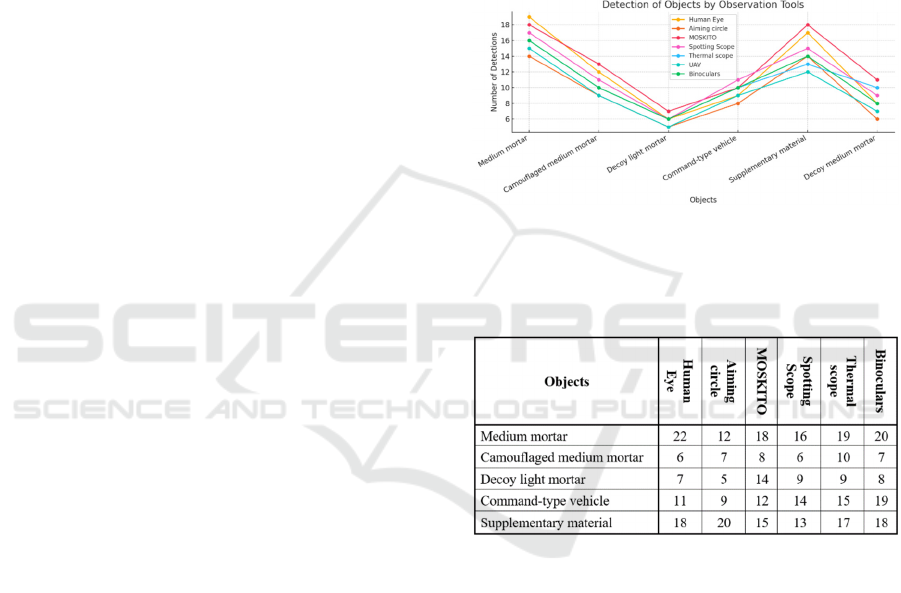
As illustrated in Figure 3, the most frequently
detected object across nearly all observational
methods was the unconcealed mortar, confirming that
the absence of camouflage significantly increases the
probability of detection, regardless of the observation
technology employed. The most effective tool for
visual detection was revealed to be the human eye,
which demonstrated the ability to rapidly and
accurately identify visible objects in most cases.
Notably, its performance surpassed that of certain
technical devices, highlighting the importance of field
experience and innate perceptual acuity in operational
environments.
In contrast, camouflaged objects, particularly
decoy positions, proved significantly more difficult
for observers to detect. The highest detection success
for such targets was achieved using the MOSKITO
device, equipped with multisensory capabilities;
however, even in this case, full and accurate
identification was not consistently ensured. These
results confirm that deception and natural camouflage
techniques substantially reduce the probability of
detection, especially when properly implemented.
Figure 3: Detectability of individual targets based on the
type of reconnaissance asset.
Table 3: Number of successful detections of individual
targets by various reconnaissance assets.
Participant preferences regarding the selection of
individual observation tools are clearly illustrated in
Table 3, which displays the sequence in which tools
were used during the observation trials. The spotting
scope demonstrated consistent, relatively low-
selectivity performance. The number of detections
was evenly distributed across different object types.
This indicates its limited ability to distinguish
between targets under specific conditions and
suggests its suitability more for general observation
rather than the targeted identification of concealed or
decoy assets.
As part of the evaluation, participants’
preferences in the sequence of observation tool usage
were also monitored. Each participant began with
unaided visual observation, followed by optional
selection of additional tools according to personal
Experimental Evaluation of Camouflage Effectiveness Against Ground-Based Surveillance
431
judgment. The table below presents the most
frequently chosen tool at each position in the
selection order (e.g., second, third, etc.). The values
indicate the percentage representation of each tool’s
selection at specific positions and serve primarily to
interpret user decision-making behavior, rather than
to evaluate tool effectiveness. An overview of these
selection preferences is provided in Figure 4, which
illustrates the distribution of tools according to their
order of use.
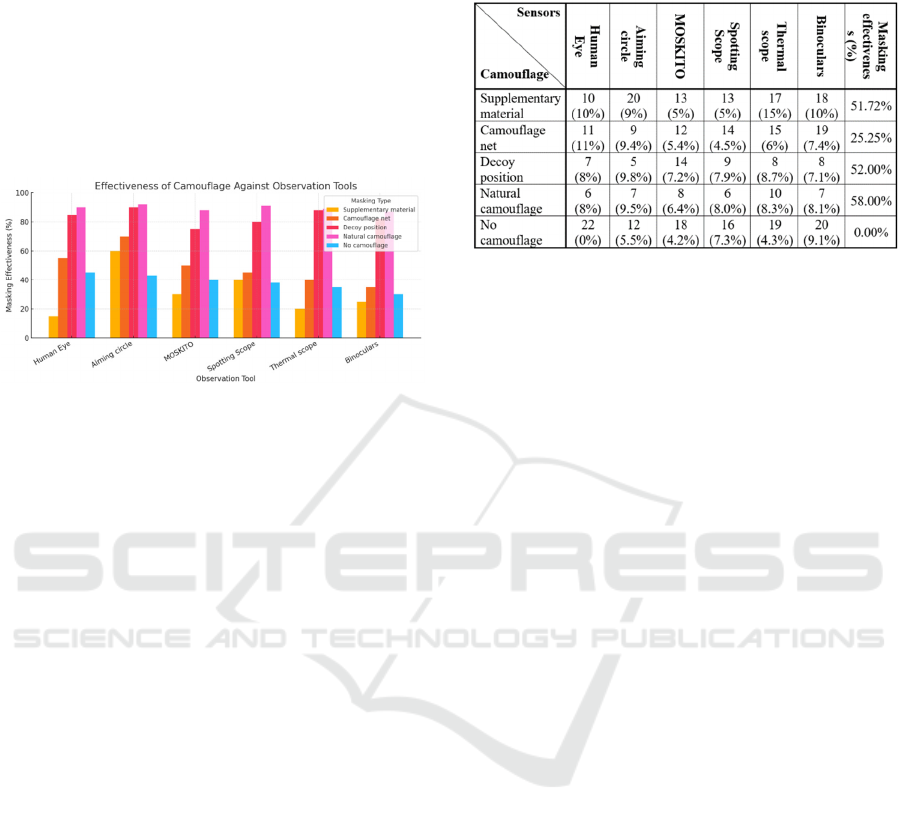
Figure 4: Comparison of the effectiveness of different
camouflage types against various reconnaissance assets.
The data indicate that natural camouflage and
decoy positions achieved the highest levels of
concealment effectiveness, with strong performance
across most observational tools. For instance, when
using the naked eye, natural camouflage yielded
nearly 90% concealment effectiveness, whereas an
unconcealed mortar was detected in 100% of cases,
underscoring the critical role of camouflage
measures. Table 4 shows the percentage differences
in detection success among observation tools across
various target types, including those masked with
natural materials or presented as decoys.
The MOSKITO multisensory device
demonstrated high effectiveness in detecting decoy
positions, but its performance decreased when
identifying naturally camouflaged objects.
Conversely, thermal imaging maintained relatively
consistent results, although camouflage effectiveness
was often lower, particularly for targets with more
prominent thermal signatures.
An important observation is that certain tools such
as the aiming circle showed lower success in
detecting camouflaged or decoy targets, where
concealment effectiveness reached up to 90%. This
finding highlights the limitations of traditional optical
instruments with narrow fields of view, which may
not be suitable for identifying concealed objects in
complex terrain.
Table 4: Detection rate and effectiveness of different
camouflage types by reconnaissance system type.
5 DISCUSSION
Although valuable insights were obtained, several
limitations must be discussed, as they may influence
the results and should be considered in their
interpretation.
The experimental group consisted of 23 students
with varying levels of familiarity and no standardized
experience profile in the use of military optics. This
variability may have affected individual target
recognition performance and represents
a methodological limitation of the study.
Another variable factor potentially affecting the
results was the environmental condition and season in
which the experiment was conducted. Testing took
place in February during the winter when vegetation
offered limited opportunities for natural concealment.
The low density of vegetation increased the visibility
of objects that, during other seasons such as summer,
would typically be more difficult to detect due to
denser foliage and different environmental color
spectra. This factor may have influenced the
effectiveness of natural camouflage and the ability to
detect it. For this reason, it is recommended that the
experiment be repeated. Conducting the study in
summer conditions would enable a comparison with
the winter variant and provide a more comprehensive
understanding of camouflage effectiveness
throughout the year.
The experiment was conducted as a single session
under clear weather conditions, without precipitation,
ensuring favorable lighting. Therefore, the results
cannot be directly extrapolated to low-visibility
scenarios, such as those involving rain, fog, or low-
light conditions. Varying meteorological
circumstances may influence both target visibility
and camouflage effectiveness, and repetition of the
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
432

experiment under different climatic conditions is thus
warranted.
In future research, it would also be beneficial to
broaden the sample of observers to include
professional soldiers, reconnaissance specialists, or
personnel from other combat-oriented military
branches. This would allow for a comparative
analysis of results across different levels of
operational expertise.
A further research direction lies in evaluating the
performance of combined camouflage techniques.
Future studies could investigate the synergy between
natural materials, camouflage nets, and decoy
positions, and assess their resistance to detection by
modern sensor systems, including thermal imaging,
multispectral sensors, and unmanned aerial
reconnaissance platforms. The outcomes of such
research could be applicable not only to tactical
military scenarios but also to civilian domains, such
as infrastructure protection.
Overall, the findings confirm that the
combination of decoy positioning and natural
camouflage provides a high degree of protection,
particularly against conventional optical surveillance
systems. Although the deployment of modern sensors
such as the MOSKITO or thermal imagers enhances
the probability of detection, even these technologies
are not fully reliable when faced with well-executed
concealment techniques.
6 CONCLUSIONS
This experiment served as an initial phase in the
validation of selected camouflage techniques under
conditions approximating those of the contemporary
battlefield specifically, in open and semi-covered
terrain with seasonally limited vegetative cover. The
data obtained provided useful pilot insights that
underscore the significant contribution of natural
camouflage and decoy positions in reducing the
probability of detection, particularly with respect to
optical systems and direct visual observation. In
contrast, unconcealed positions were identified with
high accuracy, confirming the critical role of
camouflage in the protection of firing positions. For
example, the use of natural camouflage reduced
detection success rates by up to 35% across most
sensor types, while decoy positions achieved an
average concealment effectiveness of 70% based on
observer ratings.
When comparing the performance of detection
tools, thermal scope and the MOSKITO multisensory
system emerged as the most effective. Conversely,
the performance of optical devices and human
observation was strongly influenced by the observers’
individual experience and the specific conditions of
observation. Nevertheless, even advanced sensors
exhibited certain limitations when faced with well-
executed camouflage, highlighting the importance of
deliberate and adaptive concealment even against
technologically sophisticated adversaries.
The partial results also reflect the influence of
environmental and seasonal factors on camouflage
effectiveness. The experiment was conducted during
the winter months, when sparse vegetation provided
minimal natural cover. It is reasonable to assume that
denser foliage during the summer season may
significantly enhance the effectiveness of natural
camouflage techniques however, this assumption
requires further experimental verification.
Based on the results obtained so far, it can be
concluded that effective concealment in the
operational environment necessitates a combination
of multiple techniques, with an emphasis on
adaptation to current conditions. The observed
influence of the human factor including the
observers’ individual skills, knowledge, and
perceptual abilities remains a significant variable in
the detection process.
Future research should focus on expanding the
experimental framework: including a broader and
more diverse sample of observers (e.g., active-duty
military personnel), conducting trials in varied
climatic and terrain conditions, and incorporating a
wider range of detection systems, such as
multispectral sensors and unmanned aerial platforms.
The experiment was designed with a strong
emphasis on repeatability and methodological rigor.
All scenarios and conditions were meticulously
documented to enable replication by other research
teams under comparable settings. Internal validity
was supported through a controlled environment and
standardized instructions for all evaluators, while
external validity was reinforced by selecting
conditions reflective of real-world deployment
scenarios encountered by mortar units.
REFERENCES
Akdemir, E., Korkmaz, M., 2024. Camouflage as a visual
language of war: symbolic interpretation in modern
conflicts. Journal of Military Visual Culture, 12(1), s.
45–59.
Ali, M.F., Zafar, H.T., Iqbal, A., 2023. Object detection and
classification using deep learning for surveillance
applications. International Journal of Heat and
Experimental Evaluation of Camouflage Effectiveness Against Ground-Based Surveillance
433

Technology, 41(2), s. 625–632. https://doi.org/10.1
8280/ijht.410218
Amphenol Aerospace, 2023. The modern command and
control (C2) framework [online]. Available at:
https://www.amphenol-aerospace.com/markets/market
-connector-the-modern-command-and-control-c2-
framework
Beals, M., 2023. Artificial intelligence (AI) and machine
learning in sensor signal and image processing. Military
Aerospace Electronics [online]. Available at:
https://www.militaryaerospace.com/computers/article/
55273984/artificial-intelligence-ai-and-machine-
learning-in-sensor-signal-and-image-processing
CZ Defence, 2022. MAD21: The new camouflage pattern
for the Army of the Czech Republic will provide
effective concealment in both natural and urban
environments. [online]. Available at: https://www.czd
efence.cz
Gardony, A.L., Bryant, D.J., Healey, M.K. et al., 2022.
Target highlighting in augmented reality degrades
broader situational awareness. Journal of Cognitive
Engineering and Decision Making, 16(1), s. 34–49.
https://doi.org/10.1177/15553434211041168
Havlík, T., Blaha, M., Potužák, L., Pekař, O., Šlouf, V.
Wargaming simulator MASA SWORD for training and
education of Czech army officers. In: Proceedings of
the 16th European Conference on Games Based
Learning, ECGBL 2022. Academic Conferences
International Limited, 2022, roč. 16., s. 811-813. ISBN
978-1-914587-52-8.
Hughes, S., 2024. Artificial Intelligence in a Multidomain
Battlefield. Military Review – Journal of the U.S. Army
[online]. Available at: https://www.armyupress.a
rmy.mil/Journals/Military-Review/Online-
Exclusive/2024-OLE/Multidomain-Battlefield-AI/
Hwang, J., MA, Y., 2024. MCAM: A Military Camouflage
Dataset for Masked Target Detection. Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision (WACV), s. 3125–3134.
https://doi.org/10.1109/WACV56688.2024.00308
Ivan, J., Šustr, M., Pekař, O., Potužák, L. Prospects for the
Use of Unmanned Ground Vehicles in Artillery Survey.
In: Proceedings Of The 19th International Conference
On Informatics In Control, Automation And Robotics
(ICINCO). Lisabon, Portugalsko: SCITEPRESS, 2022,
roč. 2022, s. 467-475. ISSN 2184-2809. ISBN 978-989-
758-585-2. doi:10.5220/0011300100003271
Karthiga, R., Asuntha, A., 2025. CAMOUFLAGE-Net:
Deep Camouflaged Target Detection Using YOLOv7
with Attention Mechanism. Defence Technology (In
Press).
Khoma, V., 2023. Camouflage in Ukrainian battlefield
tactics: blending, deception and adaptation. Eastern
European Security Review, 9(2), s. 103–119.
Kim, D.H., Yang, J.H., Kwon, O., 2021. Network-based
evaluation of camouflage effectiveness using clustering
of pattern similarity. Applied Sciences, 11(4), 1843.
https://doi.org/10.3390/app11041843
Li, C., Tian, Y., Zhou, M. et al., 2024. MilDetr: A
Transformer-Based Model for Detecting Camouflaged
Military Targets. Military Sensing Symposium
Proceedings. https://doi.org/10.48550/arXiv.2401.045
67
Li, Y., Zhang, J., Liu, H. et al., 2022. CSsub: A perceptual
model of camouflage effectiveness based on color,
texture and structure similarity. Computers & Graphics,
107, s. 84–93. https://doi.org/10.1016/j.cag.2022.0
1.004
Matthews, R., Wu, H., Xu, L. et al., 2024. Bio-Inspired
Camouflage in Autonomous Swarms and Bionic
Systems. Robotics and Autonomous Systems, 168,
104632. https://doi.org/10.1016/j.robot.2024.104632
Mulla, M.Y., Patil, M.A., Shinde, R.S., 2024. Comparative
Analysis of YOLOv5 Architectures for Detection of
Camouflaged Human Targets. Defence Science
Journal, 74(1), s. 58–67. https://doi.org/10.1442 9/dsj.
74.18654
Sedláček, M., Dohnal, F., Ivan, J., Šustr, M. Possible
approaches to assessing terrain mobility after the effects
of artillery munition. Cogent Social Sciences, 2024,
10(1), 2368096. ISSN 2331-1886. doi:10.1080/
23311886.2024.2368096
Su, L., Yu, H., Zhao, W., 2023. Advances in infrared
camouflage textiles: Flexible and adaptive materials for
stealth applications. Materials Today, 64, s. 92–105.
https://doi.org/10.1016/j.mattod.2023.05.001
Šlouf, V., Blaha, M., Müllner, V., Brizgalová, L., Pekař, O.
An Alternative Model for Determining The Rational
Amount of Funds Allocated to Defence of The Czech
Republic in Conditions of Expected Risk. Obrana a
strategie, 2023, 2023(1), 149-172. ISSN 1214-6463.
doi:10.3849/1802-7199.23.2023.01.149-172
Wei, Y., Deng, H., Zhou, Y. et al., 2021. DeepCam:
Automatic camouflage pattern generation via
convolutional neural networks and eye-tracking
validation. Computers & Graphics, 97, s. 1–12.
https://doi.org/10.1016/j.cag.2021.03.004
ZHANG, Weiguo, Zhen CHEN A Xiaowei WANG, 2021.
Review of camouflage and concealment strategies in
modern warfare. Defence Technology, 17(1), s. 90–
101. https://doi.org/10.1016/j.dt.2020.04.001
Zeng, X., Luo, Q., Chen, R., 2024. UAV-based
camouflaged target detection under low-angle
observation using hybrid CNN-Transformer networks.
Sensors, 24(3), 512. https://doi.org/10.3390/
s24030512.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
434
