
Multivariate Automatic Tuning of Isolation Forest for Anomaly
Detection in Critical Infrastructures: A Solution for
Intelligent Information Systems
David Saavedra Pastor
1a
, José Vicente Berná Martínez
1b
, Lucia Arnau Muñoz
1c
and
Carlos Calatayud Asensi
2d
1
Department of Computer Science and Technology, University of Alicante, Spain
2
Head of Reverse Osmosis, Aguas de Valencia S.A., Spain
Keywords: Isolation Forest, Anomaly Detection, Auto-Tuning, Hyperparameter Tuning, Critical Infrastructure,
Real-Time Monitoring.
Abstract: The Isolation Forest (IF) algorithm is effective in detecting anomalies in critical infrastructure, but its
performance depends on the proper setting of five hyperparameters: sample size, number of trees, maximum
tree depth, maximum number of features and detection threshold. Static tuning of these parameters is
inefficient and poorly adaptable to dynamic environments. This paper proposes a multivariate autotuning
method that automatically optimises these hyperparameters by: (1) adaptive adjustment of the sample size
based on the standard deviation of the anomaly scores, (2) selection of the number of trees according to F1-
score stabilisation, (3) control of the maximum depth based on the average isolation rate, (4) adjustment of
the maximum number of features according to the variance of the data, and (5) optimisation of the detection
threshold by minimisation of a cost function. The auto-tuning procedure has been validated in the detection
of anomalies in drinking water networks, showing an F1-score improvement of 7.5% and a reduction of the
execution time by 22.55% compared to static configurations, demonstrating its feasibility for real-time
systems.
1
INTRODUCTION
Critical infrastructures such as water, energy and
transport distribution networks rely on real-time
monitoring systems to ensure their safety and
efficiency. These systems generate large volumes of
sensor data, where early detection of anomalies, such
as leaks or outages, is crucial to optimise resources
and prevent damage and losses. The Isolation Forest
(IF) algorithm (Liu et al., 2008) has established itself
as an efficient technique to identify anomalies in
complex datasets by randomly partitioning the data
space. Its simplicity and low computational cost make
it ideal for real-time applications. However, its
performance depends on the proper setting of the five
hyperparameters that define it: sample size (S),
a
https://orcid.org/0009-0006-2132-1307
b
https://orcid.org/0000-0002-9007-6054
c
https://orcid.org/0009-0008-4555-4409
d
https://orcid.org/0009-0007-5744-631X
number of trees (T), maximum number of features
(F), maximum depth of trees (D) and detection
threshold (Th). The static adjustment of these
parameters leads to a lack of adaptability of the
algorithm to the evolution of the information sources,
which can cause instability to changes in the data,
false positives (unnecessary alarms) or false
negatives (undetected anomalies), compromising the
efficiency and reliability of the model.
This paper proposes a method for multivariate
dynamic self-adjustment of the IF hyperparameters
without human intervention, improving their
accuracy, adaptability and robustness. The approach
integrates: (1) adaptive adjustment of S based on the
standard deviation of the anomaly scores, (2)
optimisation of T by F1-score stabilisation, (3)
selection of F according to the variance of the
Pastor, D. S., Martínez, J. V. B., Muñoz, L. A. and Asensi, C. C.
Multivariate Automatic Tuning of Isolation Forest for Anomaly Detection in Critical Infrastructures: A Solution for Intelligent Information Systems.
DOI: 10.5220/0013710700004000
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2025) - Volume 2: KEOD and KMIS, pages
393-400
ISBN: 978-989-758-769-6; ISSN: 2184-3228
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
393

features, (4) control of D based on the average
isolation rate and (5) adjustment of Th by
minimisation of a cost function. To validate this
proposal, the method has been tested on real drinking
water infrastructures, on which the IF algorithm is
evaluated after the dynamic self-adjustment
processes. The results have shown an improvement of
the F1-score by 7.50% (from 0.80 to 0.86) and a
reduction of the execution time of the IF algorithm by
22.55% (from 5.10s to 3.95s) as it optimises the size
of the datasets to the minimum necessary to maximise
accuracy, demonstrating its potential for dynamic
environments.
The paper is organised in five sections: section 2
reviews the state of the art of the IF algorithm and its
variants, section 3 develops the proposed
methodology, section 4 presents the experimental
results and section 5 presents the conclusions and
future research lines.
2
STATE OF THE ART
Isolation Forest (Liu et al., 2008) is a technique for
anomaly detection that uses random partitions of the
data space by means of decision trees. Its
computational efficiency and simplicity have made it
a popular tool for identifying anomalies in complex
datasets. However, its performance depends on the
proper configuration of its multiple hyperparameters
and the deviations generated in high dimensionality
datasets have motivated the development of variants
to improve its accuracy and adaptability.
Extended Isolation Forest (EIF) (Hariri et al.,
2019) replaces axis-parallel splits with random
hyperplanes, reducing geometric deviations and
improving detection in non-aligned distributions.
However, EIF does not address dynamic
hyperparameter optimisation, leaving this task to
humans. Cluster-Based Improved Isolation Forest
(CIIF) (Karczmarek et al., 2020) integrates 'k-Means'
clustering to adapt partitions to spatio-temporal data,
but introduces a new hyperparameter that makes
automatic adjustment difficult, the number of
clusters. SCiForest (Liu et al., 2010) optimises
partitions using information gain criteria, speeding up
anomaly isolation in multivariate systems, although it
still relies on manual settings for parameters such as
maximum depth or number of features.
Other more recent approaches such as the
Bilateral-Weighted Online Adaptive Isolation Forest
(Hannák et al., 2023) adjusts the weights on tree paths
according to dynamic patterns and improves
detection in data streams but also does not
automatically optimise its parameters. The Deep
Isolation Forest (Xu et al., 2023) incorporates neural
networks to combine scores from different trees,
increasing robustness in complex datasets, although
at the cost of higher computational complexity and
without an approach for multivariate adjustment.
Finally, other hybrid methods, such as Hybrid
Isolation Forest (Nalini et al., 2024), combine IF with
clustering techniques, but their effectiveness still
depends on static manual configuration. Some
variants adjust parameters such as the number of trees
or the detection threshold by means of rules of thumb,
but these rules again generate a truly static
configuration.
There is no comprehensive solution to the
algorithm's hyperparameter tuning problem as some
proposals optimise certain parameters while leaving
others untuned (Bischl et al., 2024). The parameter
tuning problem generates such a high impact on
model accuracy that approaches can now be found
that address the issue by combining techniques that
make up for the tuning shortcoming, such as (Priyanto
and Purnomo, 2021) where IF is combined with Long
Short-Term Memory so as not to require continuous
fine-grained hyperparameter tuning. Although the
proposal manages to generate an adequate fit, low
ROC curve values are still observed because the
anomaly detection method can only detect anomalous
samples with a huge False Positive and False
Negative value. In (Dhouib et al., 2023), a method for
generalisation of the score function motivated by
information theory is proposed and used to aggregate
the scores of tree estimators so that the anomaly
detection threshold can be optimised, although no
systematic improvement was achieved and even in
some datasets poor performance was generated. On
the other hand, in (Lee et al., 2020) a sequential
model-based optimisation (SMBO) method is used,
which includes Bayesian optimisation and tree-
structured parameter estimators (TPE), the problem it
has is that it uses a random search so that areas of the
search space may be left unexplored, falling into local
optima.
In this work we propose a multivariable
autotuning system that automatically optimises its
hyperparameters. By obtaining a procedure that can
be executed autonomously, when necessary, IF can
dynamically self-configure optimising its efficiency
and validity in real-time environments. When data
evolves, e.g. changes between day/night,
holiday/work, the autotuning process can be run to
optimise IF and restore its accuracy.
KMIS 2025 - 17th International Conference on Knowledge Management and Information Systems
394
3
METHODOLOGY
Table 1 summarises the techniques used in each
hyperparameter (HP) for automatic tuning together
with the initial default value.
Table 1: Auto-tuning process and default values of the HP.
HP Process Ad
j
ustment Defalt
S
Standard deviation
(
σ
)
. 256
T
Metric stabilisation
(
F1-score
)
. 100
F
Variance (σ
2)
. 1.0
D Average isolation rate (
R
). Log
(2) (
S
)
Th Cost function (F
P
, F
N
) 1.0
During the tuning process, default values shall be
used for those hyperparameters that have not been
calculated. When the appropriate value of a
hyperparameter is set, the optimal value shall be used
for the calculation of the next hyperparameter.
3.1 Sample Size Adjustment
The sample size (S), which defaults to 256, defines
the subset of data used to construct each tree, directly
affecting the stability of the anomaly scores. A too
small S can generate unrepresentative trees, while an
excessive S increases the computational cost without
significant improvement, especially in datasets with
high variability. To optimise S automatically, we
propose a method based on the variability of the
anomaly scores, measuring their standard deviation
(σ). This approach adjusts S according to its
dispersion, ensuring a trade-off between accuracy and
efficiency. First, the standard deviation σ
o
of the
original set Dat is calculated. The adjustment process
will start from S=256 and search for a minimum S
sufficient to achieve a minimum set standard
deviation σ
min
similar to the original set standard
deviation with a maximum error e
σ
, formally defined:
min
𝑆
→ 𝜎
≤𝜎
± 𝑒
(1)
Input: Dat (original dataset), S=S_initial = 256, e
σ
=0.05, Inc
Dat
=
0.1
Output: Adjusted S
σ
o
= standard_deviation(Dat)
σ
min
= standard_deviation(Dat(S))
While S < card(Dat) AND σ
min
> σ
o
± e
σ
S = S*(1+Inc
Dat
)
σ
min
= standard_deviation (Dat(S))
EndWhile
Return S
Pseudocode 1: Adaptive adjustment of the sample size (S).
The use of standard deviation (σ) is due to its
sensitivity to dispersion and its low computational
cost (O(n)), compared to alternatives such as entropy
or interquartile range. This process will be iterative,
showed in Pseudocode 1, incrementing S by a
percentage Inc
(Dat)
(e.g. 10%) until the condition is
met or S=card(Dat).
3.2 Number of Trees Adjustment
In the IF algorithm, the number of trees (T), set by
default to 100, determines the number of random
partitions used to compute the anomaly scores, and
influences the robustness and computational cost of
the algorithm. An insufficient T generates inaccurate
results, while an excessive T increases the execution
time without significant improvements in accuracy.
To adjust T we propose a method based on the
stabilisation of the F1-score performance metric. The
process will use values of T_val=[5,100] with step
jumps of step=5, starting from value 5 until reaching
the appropriate level, and maximum 100. To evaluate
the performance, we generate an artificially
contaminated subset of the original dataset (Dat),
using the previously calculated S, introducing 1% of
anomalies by a random increase of 50% in a randomly
selected feature, simulating a peak value. The
artificial 1% contamination ensures that the
anomalies are rare but detectable. The procedure,
Pseudocode 2, iterates by running IF with values in T
of T_val, identify as anomalies the 1% of the data
with the highest anomaly scores and calculate the F1-
score by comparing these identified anomalies with
those actually contaminated.
Input: T_val = [5,100], step=5, N = 3, F1
sta
= 0.01, S=calculated
in section 3.1, T=0, Dat'(S) = Contaminate 1% of Dat(S)
Output: Adjusted T
F1-score-list = [] // List to store F1-scores, empty
While
T =T + step
Run IF with T trees on Dat'(S) -> scores
Calculate F1-score (scores)
F1-score-list.stack(F1-score)
If (len(F1-score-list)<N) Continue
meet=0
For i= len(F1-score-list) - N to len(F1-score-list)
If F1-score-list[i]≤ F1
sta
meet=+1
If meet=N Return T
Endwhile
Pseudocode 2: Calculation of the number of trees (T).
F1-score will be considered stable when in N
iterations F1-score ≤ F1
sta
is obtained, accepting as
Multivariate Automatic Tuning of Isolation Forest for Anomaly Detection in Critical Infrastructures: A Solution for Intelligent Information
Systems
395

the value of T that of the last iteration. In our proposal
N=3 to avoid local stabilisations and F1
sta
=0.01 to
require high accuracy. If F1-score does not stabilise
T=100.
3.3 Maximum Features Adjustment
The maximum number of features (F) defines the
proportion of features used in each random partition.
An F that is too high may incorporate noise, while an
F that is too low reduces the ability to detect
anomalies in features that are not being considered.
To optimise F we use the variance (σ²) of the features.
The process, Pseudocode 3, starts with all features
F=1.0 of the original dataset (Dat(S)). The first step
is to normalise the values of Dat by scaling the values
of each feature to a common range, e.g. [0,1].
Subsequently, the variance of a subset of features is
calculated according to the ratio F and the average
variance (V_prom) is obtained by averaging the
variances of each feature. The boundaries of quartile
1 (B
Q1F
) and quartile 4 (B
Q4F
) of the set of variances
generated by:
𝐵
=
_() _()
(2)
𝐵
=
_() _()
(3)
Input: Dat (original dataset), F=F_initial = 1.0, α_reduction =
0.5, α_increase = 1.5, F_min = 1/num_feat(Dat), F_max = 1.0
Output: F adjusted
Normalise Dat by scaling each characteristic to [0,1].
num_features = num_feat(Dat)
While true:
selected_features = SelectRandom(F * num_features, Dat).
σ²= CalculateVariance(selected_features)
V_prom= Average(σ²)
Q1, Q2, Q3, Q4= CalculateQuartiles(σ²)
B
Q1F
= (max_value(Q1) + min_value(Q2)) / 2
B
Q4F
= (max_value(Q3) + min_value(Q4)) / 2
If V_prom>
B(Q4F)
:
If F * α_reduction< F_min:
Return F
F= F * α_reduction
Else If V_prom <
B(Q1F)
:
If F * α_increase > F_max:
Return F
F = F * α_increase
Else:
Return F
UpdateModelIF(F)
EndWhile
Return F
Pseudocode 3: Setting the maximum number of features (F).
If V_prom exceeds B
Q4F
, it indicates high dispersion
and possible noise so we would want to decrease the
value of F as long as it allows to select at least 1
feature. If V_prom is less than B
Q1F
, it indicates loss
of information, so we would seek to increase F,
selecting more features as long as F≤ 1.
The value of increasing or decreasing F is done by
multiplying F by a constant α. The values of F are
restricted to the range [F_min=1/num_feat(Dat),
F_max=1.0]. After each adjustment, the variance is
recalculated with the new F and the IF model is
updated with the new F value.
3.4 Setting the Maximum Depth
The maximum depth (D), usually defined in IF as
log
(2) (
S), limits the growth of trees. Too low a D
prevents complex anomalies from being detected,
while too much D can generate unnecessarily deep
trees, increasing the computational cost. To optimise
D, Pseudocode 4, we propose a method based on the
average isolation rate (R), defined as the average
depth at which anomalies are isolated.
Input: Dat (original dataset), R_75, R_25, D_min = 1, D=D_max
= log
(2) (
S), β = 0.2
Output: D appropriate
Contaminate 5% of Dat to 50% identify anomalous records
While
Execute IF with D on Dat
Identify top 5% of points with highest score
Create anomaly set
Calculate R as the average of the elements of C
R
If R < R_75 AND D > D_min:
D = max(D*(1-β), D_min) // Reduce D
Else if R > R_25 AND D < D_max:
D= min(D*(1+β), D_max) // Increase D
Else:
Return D
EndWhile
Return D
Pseudocode 4: Setting the maximum depth (D).
The process starts by contaminating 5% of the dataset
(Dat(S)) by incrementing a random feature by 50% to
identify anomalous records. We initialise D as
D_max= log
2
(S) and D_min=1 (minimum height of 1
node), where S is the sample size. We run the IF
algorithm on Dat(S), create a set C
R
with the isolation
depths of the anomalies and calculate R as the average
of the elements of C
R
. We compare R with the
thresholds R_25 (quartile Q1) and R_75 (quartile Q3)
of the isolation depths. If R is less than R_75 and
D>D_min, it indicates slow isolation and possible
KMIS 2025 - 17th International Conference on Knowledge Management and Information Systems
396

overfitting, so we reduce D by D=max(D×(1-
β),D_min). If R is below R_25 and D<D_max, it
indicates that anomalies require more partitions, so
we increase D by D=min(D×(1+β), D_max). If R is
between R_25 and R_75, D is returned. We restrict D
to the range [D_min=1, D_max= log
(2) (
S)] to balance
accuracy and efficiency, and β will be a value less
than 1 and greater than 0, whose size will depend on
the willingness with which we wish to make the
adjustment, empirically we use β=0.2.
This fitting is done iteratively, updating the IF
model with the new D at each iteration to adapt to
changes in the complexity of the data.
This method is based on the fact that anomalies
tend to be isolated in fewer partitions than normal
points, a principle of the IF algorithm. The adjustment
rate β=0.2 produces gradual changes, avoiding large
oscillations. The thresholds R_25 (quartile Q1) and
R_75 (quartile Q4) are calculated from the isolation
depths of the contaminated anomalies, representing
the expected distribution of the isolation rate in the
dataset. The R_25 and R_75 thresholds are obtained
in an initial analysis by running IF with D=log
(2)
(S)
on a contaminated dataset (5% anomalies),
calculating the isolation depths of the anomalies and
determining the 25 and 75 quartiles of these depths,
reflecting the expected distribution of the isolation
rate. This approach ensures that the adjustment of D
is sensitive to the complexity of the anomalies,
optimising detection without unnecessary
computational costs.
3.5 Detection Threshold Adjustment
The detection threshold (Th) determines at what score
an element is classified as anomalous. This threshold
is crucial to control the false positive (FP) and false
negative (FN) rate. A too low Th may generate
unnecessary alarms by marking records as anomalies
when they are not, while a too high Th may not detect
critical anomalies.
To optimise Th we propose a method based on the
minimisation of a cost function that weights the
classification errors according to their impact on the
application context, Pseudocode 5. The cost function
FC(Th) assigns a weight to errors due to false
positives and false negatives, so that it can give more
importance to one type of failure or the other.
FC(Th) = δ - FP(Th) + (1- δ) - FN(Th) (4)
Where FP and FN represent the false positive and
false negative rates, and δ is a weight reflecting the
relative importance of each type of error. If δ=0.5,
both errors have the same weight. This value is
selected empirically after a preliminary analysis of
the impact of the errors.
Before evaluating FC(Th), we generate a dataset
from the original dataset of size S, Dat(S),
contaminating it with 5% anomalies, increasing by
50% a random feature in the selected records to
simulate anomalous events and identify exactly the
contaminated records. Next, we apply a binary search
on the range of Th between Th_min=0 and
Th_max=1.0, initialising Th=0.5. The binary search
evaluates the cost function FC at the intermediate
points (Th+Th_min)/2 and (Th_max+Th)/2. If
FC((Th+Th_min)/2) is less than FC((Th_max+
Th)/2), Th_max=Th and Th=(Th+Th_min)/2 are
updated; otherwise, Th_min=Th and Th=(Th_max+
Th)/2 are updated. This process continues as long as
Th_max-Th_min≥grad with grad=0.01, ensuring
accuracy with low computational cost.
Input: Dat (original dataset), δ = 0.2, Th_min = 0, Th_max = 1.0, grad =
0.01, Th = 0.5, FC (cost function: FC(Th)=δ-FP(Th)+ (1-δ) -FN(Th))
Output: Th appropriate
Contaminate 5% of Dat (increase 50% of a characteristic)
While Th_max - Th_min ≥ grad:
mid1 = (Th + Th_min)/2
mid2 = (Th_max + Th)/2
If FC(mid1) < FC(mid2):
Th_max = Th
Th = mid1
Else:
Th_min = Th
Th = mid2
EndWhile
Return Th
Pseudocode 5: Setting the detection threshold (Th).
The binary search is selected for its efficiency (O(log
n)). The 5% contamination level reflects a realistic
estimation of anomalies in critical systems, and
allows to accurately identify anomalous records to
calculate FP and FN in the cost function. The initial
value of Th=0.5 is selected as the midpoint of the
range [0, 1.0] for the binary search. The weight δ=
value can be adjusted according to the domain, in this
case δ=0.2 is empirically selected to prioritise false
negatives (FN), relevant in critical systems where
anomaly detection is a priority. For example, in
contexts where FNs are more critical, values such as
δ=0.6 could be used. The grad=0.01 ensures accurate
Th by limiting the difference between Th_max and
Th_min, avoiding unnecessary iterations.
Multivariate Automatic Tuning of Isolation Forest for Anomaly Detection in Critical Infrastructures: A Solution for Intelligent Information
Systems
397
4
EXPERIMENTATION
In this section we will compare the auto-tuned model
with static configurations, evaluating its adaptability,
accuracy and computational efficiency. The
implementation was done in Python 3.10 using the
'scikit-learn' library (version 1.6). The experiments
were run on a computer with an Intel Core i9-13900H
(2.50 GHz) processor, 32 GB of RAM, an NVIDIA
GTX 4060 GPU and the Windows 11 operating
system in its 24H2 version. We repeated each test
three times and averaged the results to reduce
variability and ensure statistical stability.
We use a real dataset from the year 2024, from a
drinking water distribution network in a city in
southeastern Spain. It contains 33096 anonymised
records with measurements every 15 minutes of 10
features, including the following data: water level,
flow (inflow and outflow), discharge and pressure in
4 geographical zones (Z1, Z2, Z3, Z4). A realistic
scenario with heterogeneous data is presented, whose
units of measurement and accuracy are detailed in
Table 2.
Table 2: Identifiers, accuracy and units of the dataset.
Characteristics ID Accuracy Units
Date F 1 da
y
Time H 15 minutes
Level Z4 N Z4 0.01 m height
Level Z1 N Z1 0.01 height
Inlet flow Z4 F-E Z4 0.01 m3/h
Out
p
ut flow Z4 F-S Z4 0.01 m3/h
Flow UII Z3 F-UII Z3 0.01 m3/h
Dischar
g
e UII Z3 I-UII Z3 0.01 m3/h
Discharge Z2 I Z2 0.01 m3/h
Discharge UII Z1 I-UII Z1 0.01 m3/h
Pressure UII Z3 P-UII Z3 0.01 mca
Pressure Z2 P Z2 0.01 mca
4.1 Sample Size (S)
Following the process described in section 3.1, we
start with S=256 and adjust S iteratively, increasing it
by 10% (S=S×(1+Inc
Dat
), with Inc
Dat
=0.1) if σ
min
exceeds the threshold σ
o
±e
σ
, where σ
o
is the standard
deviation of the original set Dat and e
σ
=0.03 is the
maximum allowed error. A small error has been
adjusted as a large similarity in deviation is sought.
The adjustment stops when σ
min
≤σ
(o)
±eσ or
S≥card(Dat).
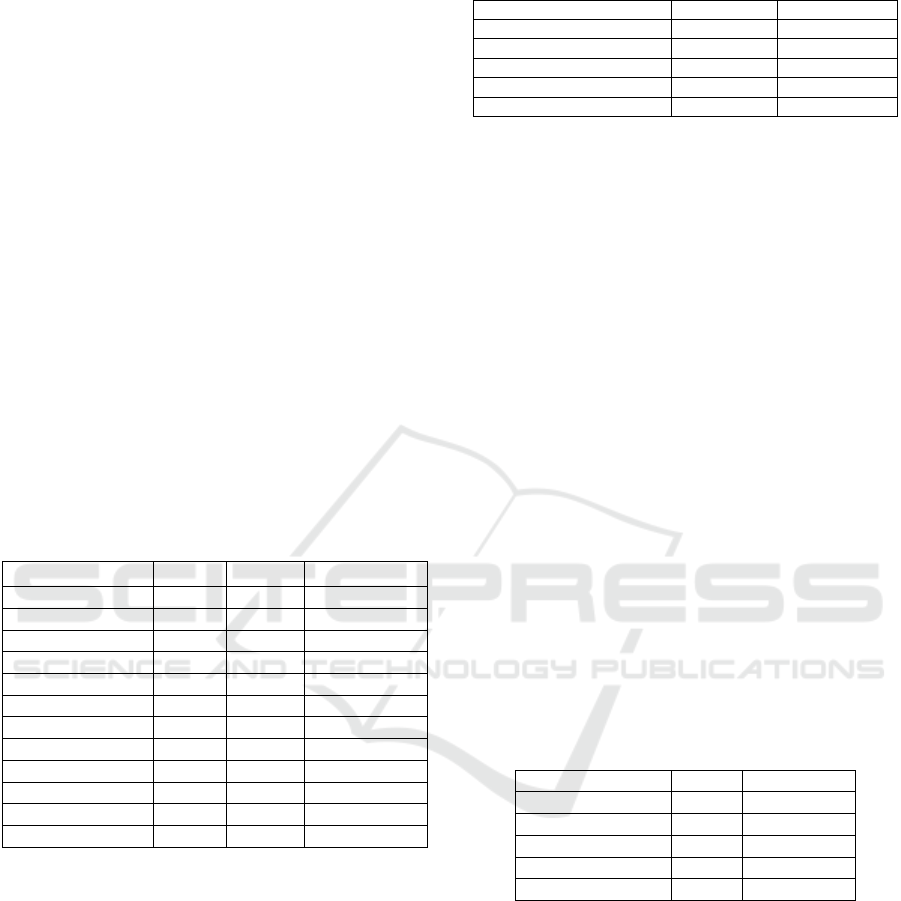
Table 3: Evaluation of sample size (S).
Iteration S σ
min
Start 256 0.56
Autotuned It. 1 282 0.56
Self-adjusted It. 2 310 0.56
Self-adjusted It. 3... 341 0.55
Self-adjusted It. 34 6540 0.48
In Table 3, the behaviour of the method is presented,
showing how S adapts to the variability of the data
compared to a static setting of S=256. The data set
shows a σ
o
=0.45, so we will look for an o
min
that
meets the given constraint. The autotuning method
manages to stabilise σ
min
, bringing it close to σ
o
with
an error within the allowed range (±0.03) at iteration
34, where S is set to 6540. This demonstrates that the
adaptive adjustment of S achieves an effective trade-
off between accuracy and computational efficiency.
The working dataset will consist of 19% of the
original.
4.2 Number of Trees (T)
Following the process described in section 3.2, an
artificially contaminated subset (1% anomalies) is
created, using the calculated value of S (S=6540). The
fit iterates T in the range [5, 100] with steps of 5,
stopping when the F1-score variance is less than 0.01
for N=3 consecutive iterations, with a maximum of
T_max=100.
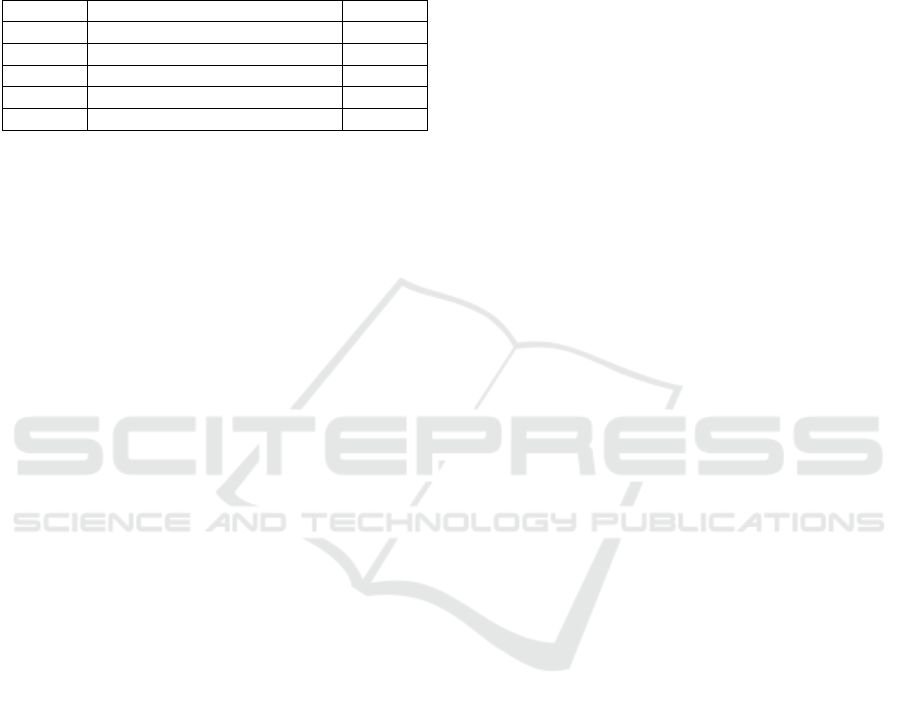
Table 4 shows the F1-score value with the
different values of T and how with T=40 a value
similar to the static default value of 100 is obtained.
Table 4: Evaluation of the number of trees (T).
Iteration T F1-score
Static 100 0.82
Auto-tuned It. 1 5 0.84
Self-adjusted It. 2 10 0.86
Self-adjusted It. 3... 15 0.87
Self-adjusted It. 8 40 0.86
This T saves up to 60% of the computation time
regarding the number of trees.
4.3 Number of Features (F)
In Section 3.3, a method was proposed that adapts F
according to the average variance (V_prom) of the
features, reducing F to F×0.5 if V_prom exceeds B
Q4F
(75th quartile), or increasing it to F×1.5 if it falls
below B
Q1F
(25th quartile), within the range
[F_min=0.1, F_max= 1.0]. The process uses S=6540
and T=40, calculated previously.
KMIS 2025 - 17th International Conference on Knowledge Management and Information Systems
398
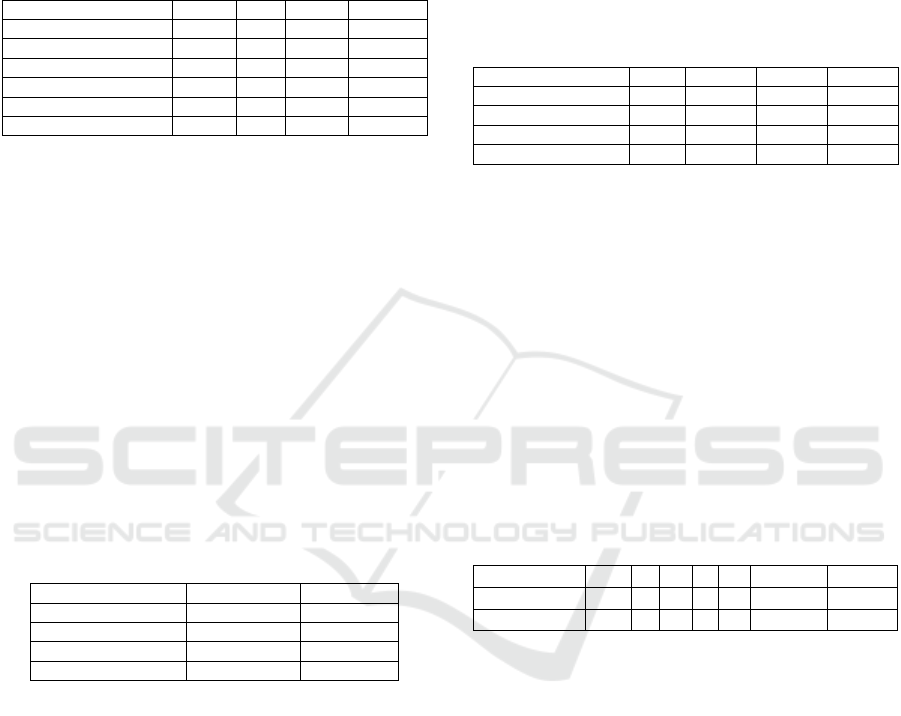
Table 5 shows how F adjusts to the variability of
the data and its impact on the F1-score. The
autotuning method adjusts F to a value of 0.84,
reducing the average variance (V_prom) so that it
remains between the thresholds B
Q1F
and B
Q4F
.
Table 5: Evaluation of the maximum number of features (F).
Iteration F B
Q1F
B
Q4F
V_prom
Static 1.0 0.14 0.23 0.33
Autotuned It. 1 0.5 0.16 0.23 0.12
Self-adjusted It. 2 0.75 0.16 0.23 0.28
Self-adjusted It. 3 0.38 0.16 0.23 0.12
Autotuned It. 4 0.56 0.16 0.23 0.15
Autotuned It. 5 0.84 0.16 0.23 0.18
4.4 Maximum Depth (D)
In Section 3.4, a method was proposed that adapts D
according to the average isolation rate (R), increasing
D by 20% (D=min(D×(1+β), D_max)) if R exceeds
R_75 (75 quartile), or reducing it by 20% (D=
max(D×(1-β), D_min)) if it falls below R_25 (25
quartile), with β=0.2, within the range [D_min=1,
D_max=log
(2)
(283)=8.15]. The R_25 and R_75
thresholds were initially calculated by running IF
with D= log
2
(6540) on a 5% contaminated dataset,
determining the 25th and 75th quartiles of the
anomaly isolation depths. The process uses S=6540,
T=40, and F=0.84, calculated previously. Table 6
shows how D fits the complexity of the data, compared
to a static configuration with D=log
2
(6540) =12.31.
Table 6: Evaluation of the maximum depth (D).
Iteration D R
Static 12.31 6.5
Autotuned It. 1 9.84 6.4
Self-adjusted It. 2 7.87 6.3
Self-adjusted It. 3 6.30 6.3
The autotuning method adapts D to an average value
of 6, adjusting to the isolation rate (R=6.3). The
adjustments based on R_25 and R_75 avoid over-
fitting and optimise the detection of subtle anomalies,
while maintaining computational efficiency.
4.5 Threshold (Th)
Following section 3.5, Th is optimised by minimising
the cost function FC(Th)=δ-FP(Th)+(1-δ)-FN(Th),
with δ=0.2, using binary search on a contaminated
subset (5% of anomalies) within the range
[Th_min=0, Th_max=1], with a gradient of 0.10. The
value of δ=0.2 was selected to prioritise false
negative (FN) detection, crucial for identifying
critical anomalies. The process uses S=6540 and
T=40, F=0.84 and D=6, calculated previously.
Table 7 shows how Th converges and its effect on
false positive (FP), false negative (FN) and cost (FC)
rates, compared to the fixed static setting of Th=1.0.
The autotuning method optimises Th to an
average value of 0.88, with an average FC of 0.07.
The prioritisation of FN (1-δ=0.8) ensures high
sensitivity in anomaly detection,
Table 7: Evaluation of the detection threshold (Th).
Iteration Th FP FN FC
Static 1.0 0.15 0.9 0.30
Autotuned It. 1 0.50 0.45 0.08 0.37
Self-adjusted It. 2 0.75 0.32 0.12 0.28
Self-adjusted It. 3 0.88 0.08 0.06 0.07
4.6 Comparison and Limitations
The auto-tuning method dynamically optimises the
five hyperparameters of the IF algorithm (S, T, F, D,
Th) for real-time anomaly detection. The performance
of the auto-tuned model, based on the values obtained
in sections 4.1 to 4.5 (S= 6540, T=40, F=0.84, D=6,
Th=0.88), is then compared with the usual static
configuration (S=33096, T=100, F=1.0,
D=log
2
(33096)= 15.01, Th= to be determined), using
the water dataset of a drinking water distribution
network. The auto-fit model was evaluated on the
basis of F1-score and runtime. Table 8 presents the
comparative results.
Table 8: Comparative analysis static vs auto-tuned.
Configuration S T F D Th F1-score Time (s)
Static 33096100 1.0 15 0.89 0.80 5.10
Autotune
d
6540 40 0.84 6 0.88 0.86 3.95
For this example, after several tests it was determined
that in the static model, a Th=0.89 provided
acceptable detection. The auto-tuned model improves
the F1-score by 7.50% (from 0.80 to 0.86) and
reduces the run time by 22.55% (from 5.10s to 3.95s)
versus the static configuration. These gains reflect the
method's ability to adapt to the heterogeneity of the
water dataset, optimising the detection of anomalies
such as leaks with greater sensitivity and efficiency.
The elimination of manual intervention ensures
adaptability in dynamic environments, overcoming
the limitations of static configurations as the model
can self-configure when accuracy drops.
However, the proposed method has some
limitations. The quality of the thresholds B
Q1F
, B
Q4F
,
R_25 and R_75 depends on an initial analysis, which
could be problematic in incomplete or noisy datasets.
Furthermore, the method assumes that anomalies are
Multivariate Automatic Tuning of Isolation Forest for Anomaly Detection in Critical Infrastructures: A Solution for Intelligent Information
Systems
399

rare and detectable by significant increments, which
may not apply to datasets with subtle anomalies or
highly skewed distributions.
5
CONCLUSIONS
This paper presents a multivariate autotuning method
that dynamically optimises the five hyperparameters
of the IF algorithm (S, T, F, D, Th), validated on a real
dataset of a water distribution network in 2024. The
proposed procedure allows the model to self-adjust
and also to do so obtaining better F1-score results and
processing time than using the default values that are
traditionally configured.
As an automatic procedure, it can be launched
periodically, ensuring that the IF model will be
adjusted to the data conditions at that instant. The
method provides a robust, adaptive and scalable
solution for real-time systems. Above all, it allows
independence from the skill and knowledge of the
expert fitting the model, providing a completely
independent and objective methodology. Compared
to approaches such as Extended IF or Deep IF, it
stands out for its simplicity and simultaneous
optimisation of all hyperparameters. It does not
require the introduction of new parameters such as
CIIF, which make the process more complex, nor
does it add high computational complexity such as
LSTM, since self-adjustment can be performed while
IF performs detection. Finally, the proposed method
allows the hyperparameters to be adjusted
continuously, unlike HIF or SCiForest, which
ensures that the algorithm will maximize its accuracy.
In the short term, future research will address the
sensitivity of the method to noisy or incomplete data,
incorporating advanced data quality assurance
techniques. In addition, we will also validate this
procedure using other critical infrastructure datasets,
such as power grids, to extend its applicability. The
objective is to study whether there is similarity in the
behaviour of the hyperparameters. In the medium
term, the aim is to incorporate techniques that detect
the ideal moment to recalculate the hyperparameters,
for example by detecting a degradation in accuracy
due to changes in data trends.
ACKNOWLEDGEMENTS
This work has been supported by Project PID2023-
152566OB-I00 "Preventive Maintenance of digital
infrastructures through the application of Artificial
Intelligence for the diagnosis and prediction of
anomalies (PreMAI)" funded by MICIU/AEI
/10.13039/501100011033 and by ERDF, EU; project
UAIND22-01B - "Adaptive control of urban supply
systems" of the Vice-rectorate for Research of the
University of Alicante; and project co-financed by the
Valencian Institute for Competitiveness and
Innovation (IVACE+i) and is eligible for co-financing
by the European Union (Exp. INNTA3/ 2022/3).
REFERENCES
Bischl, B., Binder, M., Lang, M., Pielok, T., Richter, J.,
Coors, S., ... & Lindauer, M. (2023). Hyperparameter
optimization: Foundations, algorithms, best practices,
and open challenges. Wiley Interdisciplinary Reviews:
Data Mining and Knowledge Discovery, 13(2), e1484.
Dhouib, H., Wilms, A., & Boes, P. (2023). Distribution and
volume based scoring for Isolation Forests. arXiv
preprint arXiv:2309.11450.
Hannák, G., Horváth, G., Kádár, A., & Szalai, M. D. (2023).
"Bilateral-Weighted Online Adaptive Isolation Forest
for Anomaly Detection in Streaming Data." Statistical
Analysis and Data Mining: The ASA Data Science
Journal, 16(3), 215-223.
Hariri, S., Kind, M. C., & Brunner, R. J. (2019). "Extended
Isolation Forest." IEEE Transactions on Knowledge
and Data Engineering, 33(4), 1479-1489.
Karczmarek, P., Kiersztyn, A., Pedrycz, W., & Al, E.
(2020). "K-Means-Based Isolation Forest."
Knowledge-Based Systems, 195, 105659.
Lee, C. H., Lu, X., Lin, X., Tao, H., Xue, Y., & Wu, C.
(2020, April). Anomaly detection of storage battery
based on isolation forest and hyperparameter tuning. In
Proceedings of the 2020 5th I.Conference on
Mathematics and Artificial Intelligence (pp. 229-233).
Liu, F. T., Ting, K. M., & Zhou, Z. H. (2008). "Isolation
Forest." In 2008 Eighth IEEE International Conference
on Data Mining (pp. 413-422). IEEE.
Liu, F. T., Ting, K. M., & Zhou, Z. H. (2010). "On
Detecting Clustered Anomalies Using SCiForest." In J.
European Conf. on Machine Learning and Knowledge
Discovery in Databases (pp. 274-290). Springer.
Nalini, M. yamini, B., Ambhika, C., & Siva Subramanian,
R. (2024). "Enhancing Early Attack Detection: Novel
Hybrid Density-Based Isolation Forest for Improved
Anomaly Detection." International Journal of Machine
Learning and Cybernetics, 1-19.
Priyanto, C. Y., & Purnomo, H. D. (2021, September).
Combination of isolation forest and LSTM autoencoder
for anomaly detection. In 2021 2nd International
Conference on Innovative and Creative Information
Technology (ICITech) (pp. 35-38). IEEE.
Xu, H., Pang, G., Wang y., & Wang y. (2023). "Deep
Isolation Forest for Anomaly Detection." IEEE
Transactions on Knowledge and Data Engineering,
35(12), 12591-12604.
KMIS 2025 - 17th International Conference on Knowledge Management and Information Systems
400
