
Comparative Analysis of Robotic Topologies for Transmission Line
Inspection
Davi Riiti Goto Valle, Ronnier Frates Rohrich and Andr
´
e Schneider de Oliveira
Graduate Program in Electrical and Computer Engineering, Universidade Tecnol
´
ogica Federal do Paran
´
a (UTFPR),
Curitiba, Brazil
Keywords:
Robotic Systems, Transmission Line Inspection, Simulation, Inspection Robots, Robot Topologies.
Abstract:
Power transmission line inspection plays a crucial role in maintaining the integrity and reliability of electrical
infrastructure. With the increasing complexity of transmission line systems, robotic systems have emerged as
a viable solution to automate the inspection process. This paper presents an analysis of three distinct robotic
platforms designed for transmission line inspection. Each robot employs different topologies and mechanisms
to perform the task, which are simulated environment. The paper compares the design, functionality, and sim-
ulation results of each robot, highlighting their strengths, weaknesses, and potential for real-world application.
1 INTRODUCTION
Power transmission lines are critical in ensuring the
continuous delivery of electricity from generation
sites to distribution networks and, ultimately, to con-
sumers. Due to the vast geographical coverage and
the often challenging terrains in which these lines are
installed, including remote, mountainous, or forested
regions, regular inspections are essential to maintain
the integrity and reliability of the electrical infrastruc-
ture. However, human operators traditionally carry
out these inspections, which involve significant safety
risks, high operational costs, and logistical complexi-
ties.
In recent years, robotic systems have emerged as
a promising and increasingly viable alternative to au-
tomating the inspection of high-voltage transmission
lines. The deployment of robots in this context of-
fers several advantages, most notably enhancing oper-
ator safety by reducing the need for physical presence
in hazardous environments. In addition, robotic in-
spections can increase the efficiency, precision, and
frequency of monitoring tasks, thus enabling more
effective predictive maintenance strategies and early
anomaly detection, which is essential to minimize ser-
vice interruptions and costly repairs.
The trend towards automation in the field of trans-
mission line inspection has been well documented
in the literature. For example, as discussed by
(A. B. Costa, 2023), significant advances have been
made in robotic technologies tailored for the power
sector, particularly in systems capable of navigat-
ing and analyzing transmission infrastructure. These
robots often integrate sophisticated sensor arrays - in-
cluding high-resolution cameras, LIDAR (Light De-
tection and Ranging), and infrared sensors — allow-
ing them to perform detailed structural assessments,
detect corrosion, measure component displacement,
and accurately identify potential failure points.
Furthermore, incorporating artificial intelligence
and machine learning into robotic platforms has im-
proved the autonomy and decision-making capabili-
ties of inspection systems. As noted in (Y. Zhang,
2021), AI-based navigation and data analysis tech-
niques have significantly improved the precision and
reliability of automated inspections, allowing robots
to adapt to dynamic environments and complex struc-
tural configurations. These intelligent systems can
also process the collected data in real-time, facilitat-
ing the generation of actionable insights and mainte-
nance recommendations.
An additional innovation in robotic inspection is
presented in the work of (R. P. Almeida, 2022), who
proposes a robotic platform that combines pulleys,
clamping, and gripping mechanisms. These mechan-
ical solutions ensure the robot’s stability and adher-
ence to the transmission line, even in adverse con-
ditions such as strong winds or irregular geometries.
Such mechanisms are essential to maintain contact
and operational continuity during inspection tasks, es-
pecially in suspended or elevated settings.
This study evaluates three different robotic sys-
Valle, D. R. G., Rohrich, R. F. and de Oliveira, A. S.
Comparative Analysis of Robotic Topologies for Transmission Line Inspection.
DOI: 10.5220/0013710500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 259-266
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
259

tems explicitly developed for inspecting transmission
lines. Each system features a unique structural topol-
ogy and specialized mechanical and sensory compo-
nents to facilitate movement along the conductors and
allow thorough inspection routines. The three robots
were modeled and simulated using CoppeliaSim to
assess their capabilities. This versatile and widely
adopted simulation platform allows for the detailed
testing of robotic designs and their interactions with
physical environments.
The primary objective of this research is to per-
form a comparative analysis of these robotic systems,
focusing on key criteria such as structural design,
mobility strategies, sensor integration, and overall
performance in simulated inspection scenarios. The
study also aims to identify common challenges each
system faces, such as maneuverability around obsta-
cles, adaptability to different line geometries, and data
acquisition quality. Insights gained from this compar-
ison will contribute to developing and refining robotic
solutions for safer, more efficient, and cost-effective
inspection of power transmission infrastructure.
2 RELATED WORK
Previous studies have focused on the development
of robotic systems for transmission line inspection,
highlighting the importance of mechanical design,
sensor integration, and control strategies. It is widely
recognized that these advanced systems are crucial
for reducing maintenance costs and improving safety.
Similarly, (T. A. Silva, 2020) discussed the challenges
faced by robots in high-voltage environments and pro-
posed solutions to improve the reliability of these sys-
tems. In this context, the robots developed in this
study build on these existing works, paying particular
attention to their ability to maneuver in challenging
environments and perform detailed inspections.
Topology, in the context of robotics, refers to a
robot’s physical, structural, and functional configura-
tion, including the arrangement of its modules, joints,
locomotion systems, and sensors. For transmission
line inspection robots, defining the topology is a crit-
ical aspect of research and development, as it directly
influences the robot’s ability to adapt to different line
segments, overcome obstacles, and perform inspec-
tions with precision. This field of study continuously
seeks to improve inspections’ efficiency, safety, and
reliability in high-voltage environments, where oper-
ational challenges are amplified by adverse conditions
such as height, weather, and electromagnetic interfer-
ence (Jiang et al., 2018).
These robots are specifically designed to navigate
transmission lines, detecting and reporting faults or
anomalies in real-time. To perform this function ef-
fectively, they must be positioned as close as pos-
sible—or even in direct contact—with the energized
line. This requirement poses significant technical
challenges in arranging electronic components, sen-
sors, and mechanical systems, which must be inte-
grated safely and efficiently. Furthermore, the appro-
priate selection of materials used in construction is
crucial, as these robots operate in extreme environ-
ments exposed to high levels of electrical voltage and
severe weather variations (Wang and Wang, 2016).
From a functional perspective, transmission line in-
spection robots can be classified into three main cat-
egories: climbing robots, which move directly on ca-
bles or structures; flying robots (UAVs), which offer
greater agility and access to remote areas; and hybrid
robots, which combine climbing and flying capabil-
ities to optimize inspection coverage and efficiency
(Chai et al., 2024).
The mechanical topology of these robots plays
a decisive role in their mobility and performance.
The arrangement of joints—including their number,
sequence, type, and axis—defines the robot’s kine-
matic structure, directly impacting its rigidity, reach,
and maneuverability (Alhassan et al., 2020). Addi-
tionally, topology optimization techniques have been
applied to reduce robotic systems’ structural weight
and energy consumption. Studies show that this ap-
proach can reduce the weight of mobile robots by up
to 20% without compromising their strength, result-
ing in greater energy efficiency and more robust field
performance (Zhu et al., 2020).
In collaborative inspection contexts, such as dis-
tributed robotic networks, maintaining a regular and
predictable topology facilitates the implementation of
communication protocols. It enables dynamic forma-
tions, such as lines, rings, and meshes. This con-
tributes to improved robot coordination, increased in-
spection coverage, and greater system redundancy
and reliability (Bayındır, 2016).
3 SIMULATION ENVIRONMENT
To simulate the three robots in dynamic environ-
ments, we used the educational version of Cop-
peliaSim. In addition to being an effective tool for
robotic systems simulation, the platform offers ef-
ficient integration with ROS (Robot Operating Sys-
tem), which is used to control each robot. The envi-
ronment was configured to replicate real-world con-
ditions, such as variations in cable length and com-
mon obstacles found on transmission lines. The per-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
260

formance of the robots was evaluated based on their
ability to traverse the lines, avoid obstacles, and per-
form inspection tasks such as visual monitoring of in-
sulators and cables.
The simulation environment was inspired by the
region of Curitiba, in the state of Paran
´
a, Brazil.
Specifically, a section between two transmission tow-
ers located in a suburban area of the city was mod-
eled, where the cable crosses various geographical
and structural elements. In real scenarios, it is com-
mon to find busy avenues with heavy traffic of cars
and trucks beneath the cables. Near the towers, there
is medium-density vegetation, including trees that,
over time, can grow close to the lines, posing contact
risks.
Along the cable, there are also various struc-
tural components of the transmission system that act
as potential obstacles for the robots, such as vibra-
tion dampers, suspension clamps, marker balls, and
EPDM or glass insulators, as shown in Figure 1.
These devices, essential to the integrity of the electri-
cal system, pose mechanical challenges that require
the robot to be capable of maneuvering, suspension,
and obstacle avoidance. Additionally, due to the prox-
imity to industrial areas and logistics hubs, the pas-
sage of large vehicles such as buses and trucks be-
neath the line can generate electromagnetic fields and
air currents that affect the stability of the robots dur-
ing inspection. Furthermore, four distinct obstacles
were measured to serve as a benchmark for the ma-
neuvering clearance achieved by each robot during
the simulations.The key parameters are described in
Table 1.
Figure 1: Objects found on transmission lines. (a) Glass
insulators, (b) Vibration dampers, (c) EPDM insulators, (d)
Suspension clamps, (e) Marker ball.
Table 1: Dimensions of the Simulated Obstacles.
Obstacle Length (cm) Height (cm) Diameter (cm) Notes
Vibration Damper 35.0 - 5.0 Cylindrical shape
EPDM Insulator - 150.0 15.0 20 sheds
Glass Insulator - 24.0 25.4 A single glass disc
Marker Ball - - 60.0 Spherical shape
To optimize simulation performance, a represen-
tative section was selected: the area closest to the
high-voltage tower, where a vibration damper is in-
stalled and dense vegetation exists on one side, cre-
ating a semi-urban environment ideal for testing lo-
comotion, gripping, and obstacle-avoidance capabili-
ties, as shown in Figure 2.
Figure 2: Simulated environment and objects in Cop-
peliaSim. (a) Simulated section, (b) Vibration dampers, (c)
EPDM insulators.
The use of CoppeliaSim, as highlighted by Frates
et al. (2023), has been essential for validating robots
in simulated scenarios before practical deployment,
particularly for robotic platforms used in transmis-
sion line inspection, similar to those evaluated in this
study.
4 OVERVIEW OF ROBOTIC
SYSTEMS
This section overviews the three robotic platforms
used for transmission line inspection. Each platform
has been designed with specific features and method-
ological approaches tailored to address the unique
challenges of transmission line environments. The
methodologies proposed in this work focus on key
aspects such as the ability to traverse complex trans-
mission line structures, offering high flexibility and
adaptability to accommodate different types and mod-
els of equipment commonly found in the field. Fur-
thermore, these platforms are developed with a mod-
ular and scalable architecture, allowing for the in-
tegration of additional tools, sensors, and functional
modules as needed. This modularity ensures that the
robotic systems can be expanded or reconfigured to
meet the varying operational requirements and tech-
nical characteristics of different transmission lines
and their components. Each methodology empha-
sizes a particular aspect of the inspection process,
whether mobility, versatility, or expandability, provid-
Comparative Analysis of Robotic Topologies for Transmission Line Inspection
261
ing a comprehensive solution for reliable and efficient
transmission line maintenance.
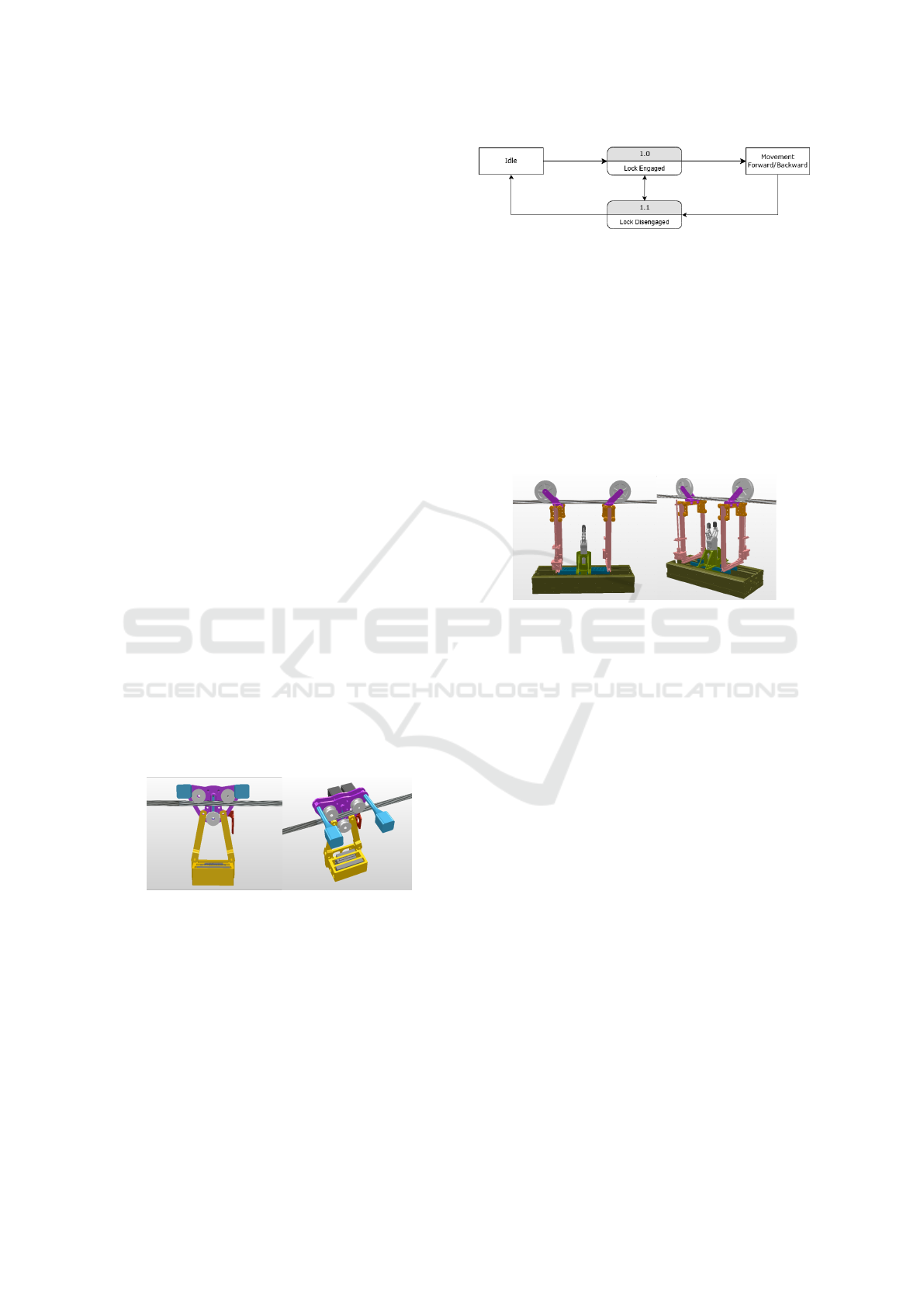
4.1 LineWalker: Simple Grasping
Mechanism
LineWalker is designed with a strong emphasis on
balance and safe traversal along transmission lines.
Its mechanical architecture relies on a simple yet ef-
fective system composed of three pulleys, one of
which functions as a gripper that securely attaches
the robot to the conductor. The robot’s body inte-
grates two motors: one dedicated to driving the pul-
leys for forward movement along the line, and another
connected to a crank-slider mechanism responsible
for operating the gripper, enabling precise attachment
and detachment from the cable. This configuration
ensures that the robot maintains stability and reliable
adherence to the line during operation, prioritizing
safety during movement.
Among the robotic platforms presented in this
work, LineWalker stands out for having the simplest
and lightest mechanical arrangement. Its reduced
structural complexity not only facilitates easier de-
ployment and handling but also directly contributes
to achieving the highest traversal speed compared to
the other topologies analyzed. This makes it partic-
ularly advantageous for inspection tasks where effi-
ciency and agility are critical, provided that the line
is free of complex obstacles. While the system offers
robust performance in line traversal, it may present
limitations when navigating around obstacles. The
overall design is similar to the topology presented by
(Rohrich et al., 2023), as illustrated in Figure 3.
Figure 3: LineWalker attached to the high-voltage cable
(CoppeliaSim).
The flowchart of the movement sequences that
LineWalker is capable of performing during its op-
eration is illustrated in Figure 4.
4.2 FlexRover: Dual-Arm System with
High Maneuverability Gripper
FlexRover is the most complex of the three robots,
featuring a dual-arm system with articulated arms ca-
Figure 4: Flowchart illustrating LineWalker’s movement se-
quence.
pable of extending and retracting to navigate obstacles
on the transmission line. The robot also includes a
central gripper mechanism that serves as an additional
contact point with the cable, providing increased sta-
bility. This third point of support reduces the risk of
the robot twisting or falling when one of the pulleys
opens. The robot’s ability to navigate obstacles be-
neath the cable adds another layer of complexity to
its design, ensuring it can operate in more challeng-
ing environments. It is presented in Figure 5.
Figure 5: FlexRover, attached to the high-voltage cable
(CoppeliaSim).
Due to its higher mechanical complexity and,
consequently, greater flexibility in movement, the
FlexRover features a larger and more sophisticated
set of motion capabilities compared to simpler plat-
forms. This advanced mobility allows the robot to
overcome a wider variety of obstacles typically found
on transmission lines, making it highly versatile for
more challenging inspection scenarios. The complete
sequence of movements and operational transitions is
presented in the flowchart shown in Figure 6.
4.3 ModuClimber: Advanced Arm and
Pulley System
ModuClimber is distinguished by its modular archi-
tecture, which allows it to adapt to different obstacle
sizes commonly found on transmission lines. One of
its most notable features is the ability to easily ad-
just its size and configuration, providing a high degree
of versatility for various inspection scenarios. The
robot employs a more sophisticated design, consist-
ing of three pulleys, motors, and articulated arms that
can be raised or lowered to navigate obstacles such as
dampers. Each arm is equipped with a pulley system
that ensures proper balance and movement along the
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
262
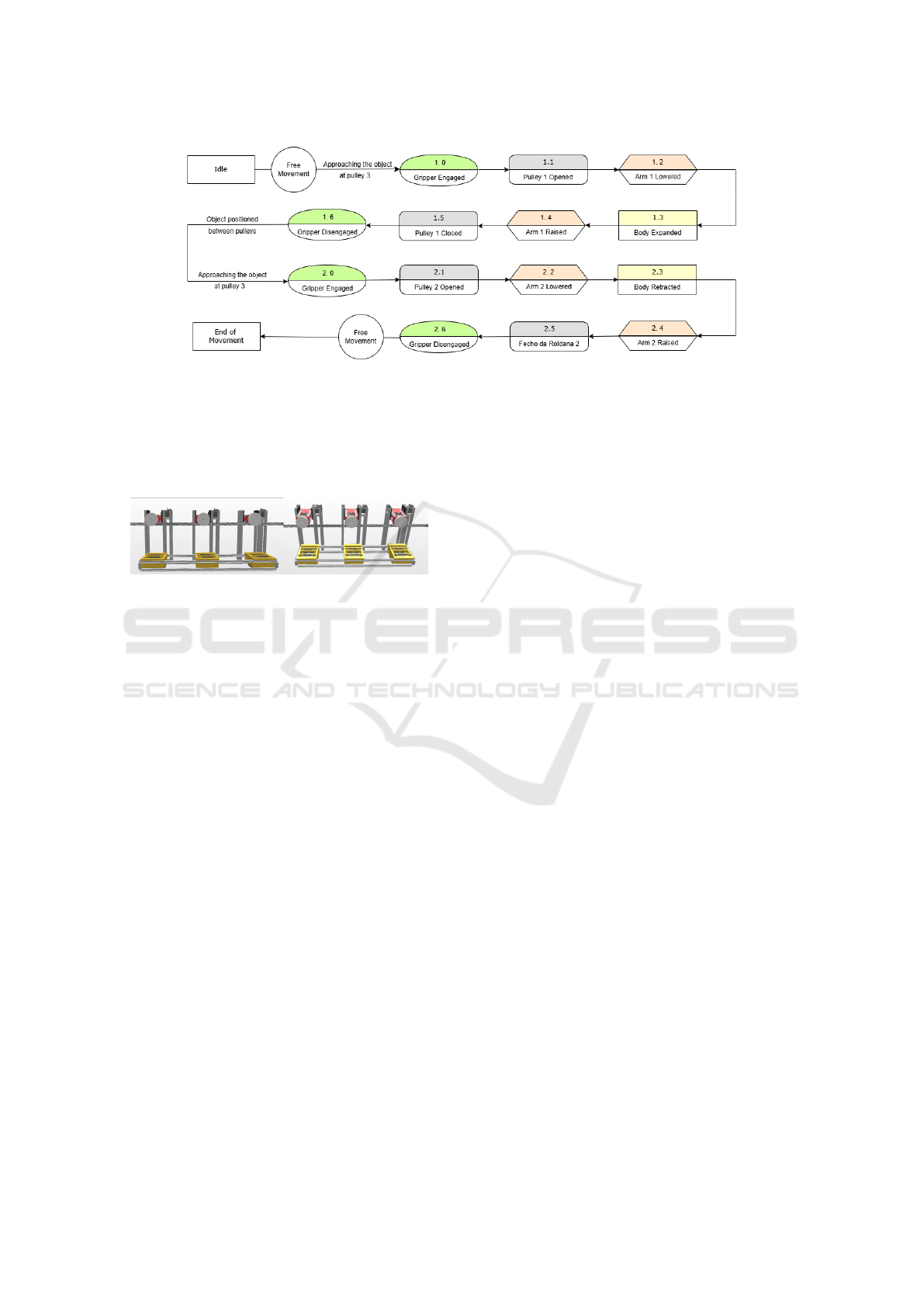
Figure 6: Flowchart illustrating FlexRover’s movement sequence.
high-voltage cable. This modular approach enables
the robot to be reconfigured quickly and efficiently,
making it a highly adaptable solution for inspecting
different transmission line segments. Figure 7 illus-
trates the overall structure and functionality.
Figure 7: ModuClimber attached to the high-voltage cable
(CoppeliaSim).
The set of movement sequences that Mod-
uClimber can perform is presented in Figure 8. This
flowchart illustrates how the robot manages its modu-
lar configuration and articulates its arms to adapt to
different obstacle sizes, ensuring safe and efficient
traversal along the transmission line.
5 SIMULATION RESULTS
5.1 LineWalker Simulation Results
In CoppeliaSim, the LineWalker maintained a stable
trajectory along the transmission line, securely attach-
ing to the cable and avoiding slippage. However, its
performance declined when encountering obstacles,
as the robot lacked the ability to dynamically adjust
its position or height, resulting in zero maneuvering
clearance. Despite these limitations, the LineWalker
performed well in simple scenarios, as its gripper
mechanism provided the strongest grasp on the cable
among the three models.
Below, as shown in Figure 9, its movement within
the simulation environment can be observed.
5.2 FlexRover Simulation Results
The FlexRover exhibited an exceptional performance
in CoppeliaSim, demonstrating the highest level of
maneuverability among the three robots. The dual-
arm system provided excellent stability, and the cen-
tral gripper mechanism ensured the robot could main-
tain balance even under challenging conditions. Ad-
ditionally, its extended reach allowed it to avoid larger
obstacles, achieving a span of 90 cm, with a maneu-
vering length of 35 cm provided by the central grip-
per. The FlexRover successfully navigated obstacles
both above and below the cable, showcasing its capa-
bility to handle more complex inspection tasks. The
movement sequences performed by FlexRover in the
CoppeliaSim simulation are illustrated in Figure 10.
5.3 ModuClimber Simulation Results
n CoppeliaSim, the ModuClimber demonstrated su-
perior performance compared to LineWalker, with its
articulated arms enabling more dynamic navigation.
The robot successfully avoided simple obstacles, such
as dampers and EPDM insulators, by raising and low-
ering its arms, although this was limited by an arm
length of only 25 cm. The additional motors and pul-
ley system allowed ModuClimber to adjust its height,
ensuring better stability and preventing potential falls,
as shown in Figure 11. However, the complexity of
the arm system required more careful control, and
some imbalances were observed in the simulation due
to its weight distribution.
All topologies struggled to longitudinally traverse
larger obstacles such as marker balls and insulators.
While ModuClimber encountered no issues with ob-
stacles located below the cable, it was unable to over-
come glass insulators; their larger diameter exceeded
the reach of its arms. FlexRover, in turn, faced chal-
lenges with obstacles positioned far below the cable.
These results clearly illustrate the inherent advantages
Comparative Analysis of Robotic Topologies for Transmission Line Inspection
263
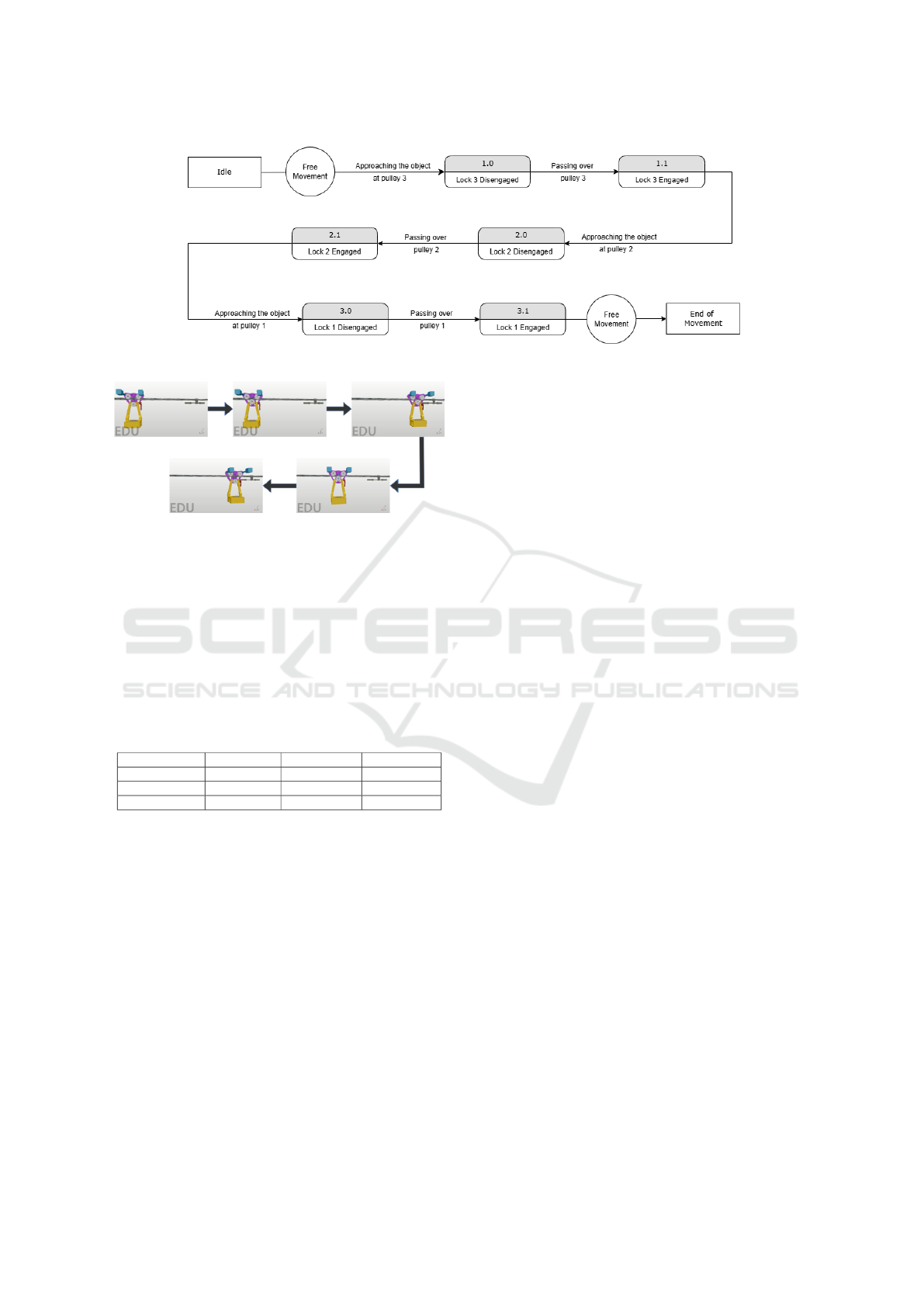
Figure 8: Flowchart illustrating ModuClimber’s movement sequence.
Figure 9: (Illustration of LineWalker’s movement within the
CoppeliaSim simulation environment.
and disadvantages of each model.
To provide a quantitative comparison of their
obstacle-handling capabilities, the key maneuvering
dimensions for each robot are detailed in Table 2.
This table specifies the maximum clearance achieved
lengthwise, as well as above and below the cable, dur-
ing the simulations.
Table 2: Comparison of the maneuvering clearance (in cm)
for each robotic platform.
Topologie Lengthwise Above-Cable Below-Cable
LineWalker - - -
FlexRover 35.0 ∞ 20.0
ModuClimber 25.0 ∞ ∞
6 DISCUSSION AND
COMPARISON
The comparative analysis of the three simulated
robotic platforms highlights distinct design ap-
proaches, each with specific characteristics that stand
out depending on the complexity of the inspection en-
vironment.
LineWalker, with its simple grasping mechanism,
demonstrated excellent performance in stable and un-
obstructed scenarios, showing the highest structural
stability among the three models. Its simplified de-
sign favors low implementation costs, reduced main-
tenance, and reliability in linear trajectories. How-
ever, its lack of dynamic adaptability compromises
its efficiency when facing obstacles. Structural mod-
ifications, such as adapting a secondary body using
LineWalker as a support base, may enable future ap-
plications in more complex environments, such as the
traversal of transmission towers.
FlexRover presented the highest degree of ma-
neuverability. Its system of dual articulated arms,
combined with a third point of contact via a central
gripper, provided excellent stability and the ability
to overcome obstacles located both above and below
the cable. Nevertheless, its more complex mechan-
ical structure demands sophisticated control systems
and more frequent maintenance. The strategy of over-
coming obstacles through pulley opening proved to
be ingenious but raises concerns about grip safety, es-
pecially due to the robot’s weight. Therefore, it is
recommended to develop a new cable coupling mech-
anism that does not rely on pulley opening.
ModuClimber represents an intermediate solution,
combining flexibility and robustness. Equipped with
articulated arms and a modular pulley system, it
showed good performance when dealing with mod-
erate obstacles and flexibility in height adjustment
during inspection. Although its maneuverability is
inferior to that of FlexRover, its modularity makes
it a highly scalable platform for different scenarios.
However, its mechanical complexity and weight dis-
tribution require additional attention during calibra-
tion and dynamic control. Improvements in weight
distribution, as well as the implementation of a front
anti-torsion mechanism, are strongly recommended.
Minor adjustments to arm length and pulley spacing
can significantly increase its ability to overcome vari-
ous types of obstacles.
In summary, the results indicate that LineWalker
is most suitable for inspections along continuous and
interference-free lines, offering robustness through
simplicity. FlexRover is best suited for challeng-
ing environments with frequent obstacles and a need
for high precision, although its complexity demands
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
264
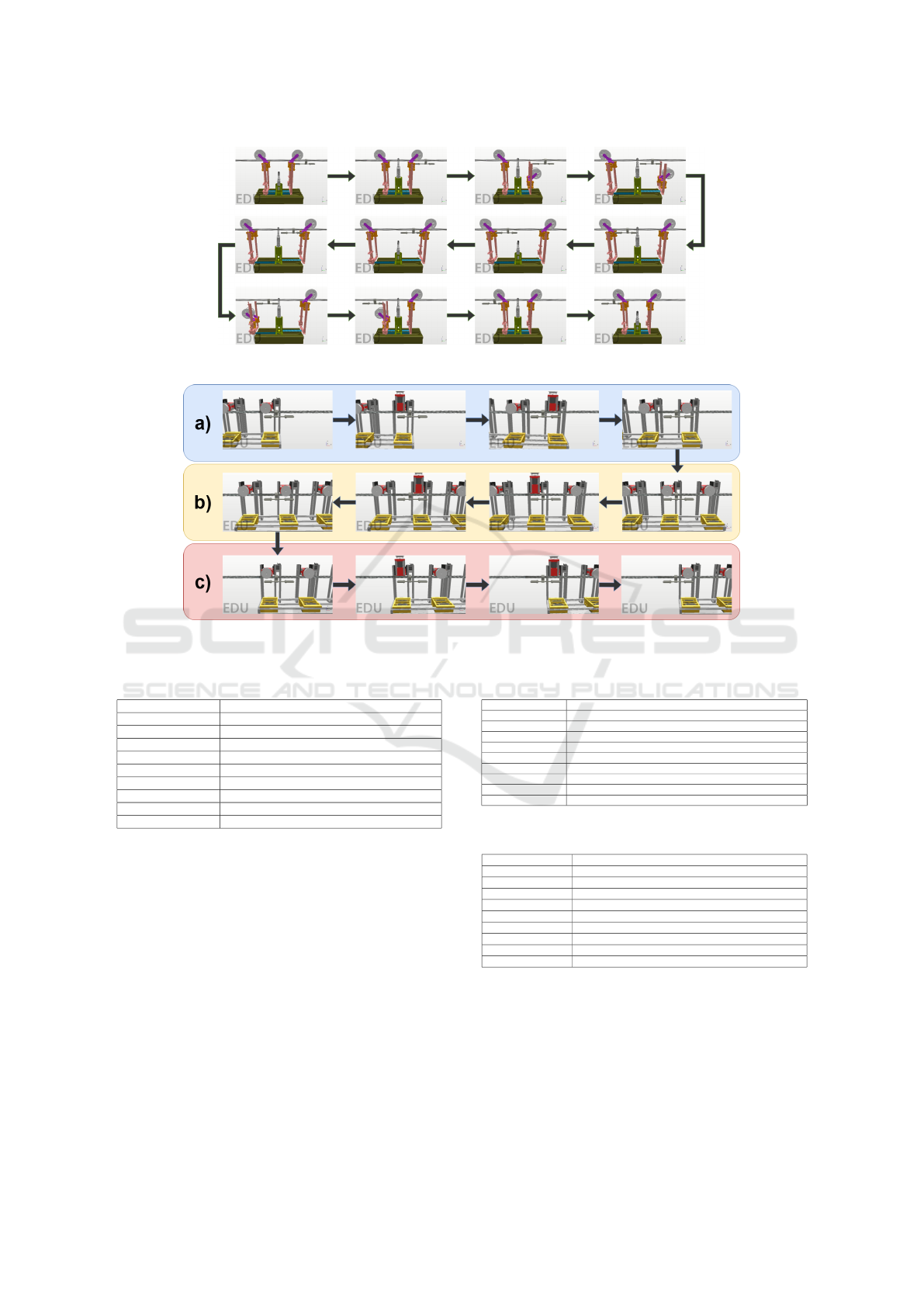
Figure 10: Illustration of FlexRover’s movement within the CoppeliaSim simulation environment.
Figure 11: Illustration of ModuClimber’s movement within the CoppeliaSim simulation environment.(a) Overcoming the
obstacle with pulley 1 (b) Overcoming the obstacle with pulley 2 (c) Overcoming the obstacle with pulley 3.
Table 3: Advantages and Disadvantages of LineWalker.
Aspect LineWalker
Design Simple, easy to control
Stability Good in simple scenarios
Maneuverability Limited, does not dynamically adjust position
Inspection Suitable for simple environments
Implementation Low operational cost
Maintenance Low maintenance due to simple design
Advantages Stability on simple lines, low cost
Disadvantages Limited maneuverability, cannot avoid obstacles
Obstacle Overcome None
greater attention to control and maintenance. Mod-
uClimber, meanwhile, combines elements of both
previous models, offering a good balance between
adaptability, scalability, and stability, making it ideal
for versatile applications in scenarios with moderate
obstacles. These aspects are summarized in the Table
3, Table 4, and Table 5.
7 CONCLUSIONS AND FUTURE
WORK
This study compared three robotic systems for trans-
mission line inspection, each employing different
Table 4: Advantages and Disadvantages of FlexRover.
Aspect FlexRover
Design Complex, with dual arms and central gripper
Stability Excellent stability, even with dynamic obstacles
Maneuverability High, can navigate complex areas and adjust position
Inspection Excellent for complex environments and challenging inspections
Implementation High, due to advanced design and control systems
Maintenance Higher likelihood of failures due to complexity
Advantages Greater stability, adaptability to dynamic environments
Disadvantages High costs, increased likelihood of mechanical failures
Obstacle Overcome Vibration Damper, EPDM and Glass Insulator
Table 5: Advantages and Disadvantages of ModuClimber.
Aspect ModuClimber
Design Complex, with articulated arms
Stability High stability with adaptable pulley system
Maneuverability Good, can raise and lower arms to avoid obstacles
Inspection Suitable for more detailed inspections, including insulators
Implementation Moderate, due to complexity of motors and systems
Maintenance Higher complexity, may require frequent maintenance
Advantages Greater versatility, good adaptability
Disadvantages Complex control system, potential glitches
Obstacle Overcome Vibration Damper and EPDM Insulator
topologies and mechanisms to address the challenges
of operating in hazardous environments. Simulation
results demonstrated that ModuClimber offers the
highest level of performance and stability, making it
the most suitable for complex inspection tasks. How-
ever, LineWalker and FlexRover also provide valu-
able solutions depending on the complexity of the
inspection environment. Future work will focus on
Comparative Analysis of Robotic Topologies for Transmission Line Inspection
265

refining the control systems of FlexRover and Mod-
uClimber to enhance their reliability in real-world ap-
plications.
The automation of transmission line inspections
is continuously evolving. Although current systems
have achieved significant advancements, challenges
remain in improving efficiency and reliability. It is an-
ticipated that robots will become more autonomous,
reducing dependence on human operators and en-
hancing inspection accuracy. Artificial intelligence
will also enable robots to make real-time decisions,
such as obstacle avoidance and route optimization.
Another significant advancement will be the im-
plementation of autonomous power systems, replac-
ing fixed power supplies with rechargeable batteries,
such as Li-ion or Li-po. This will provide greater au-
tonomy, reducing maintenance needs and increasing
inspection efficiency. Optimizing energy consump-
tion and in-field battery recharging are promising ar-
eas for future research.
Next-generation sensors and wireless communica-
tion technologies will play a fundamental role in im-
proving inspections. The use of high-definition cam-
eras, thermal sensors, and LIDAR will allow for more
precise fault detection. The integration of intercon-
nected sensor networks will enable real-time commu-
nication with control centers, facilitating analysis and
decision-making.
In terms of control architecture, the integration
of multi-robot systems will be crucial. Coordination
among robots will allow for greater coverage of trans-
mission lines and increased task efficiency. Collabo-
rative navigation systems, where robots share infor-
mation about position and environmental conditions,
can result in more efficient and safer operations.
Future research should focus on improving the au-
tonomy, maneuverability, and adaptability of robots,
especially in dynamic environments. The integration
of artificial intelligence to optimize control and navi-
gation is also a promising area. The work of (de Al-
buquerque et al., 2024), which utilized a simulation
environment similar to CoppeliaSim for transmission
line inspections, exemplifies how these technologies
can be applied in real-world scenarios.
ACKNOWLEDGEMENTS
The project is supported by the National Council for
Scientific and Technological Development (CNPq)
under grant number 407984/2022-4; the Fund for
Scientific and Technological Development (FNDCT);
the Ministry of Science, Technology and Innovations
(MCTI) of Brazil; Brazilian Federal Agency for Sup-
port and Evaluation of Graduate Education (CAPES);
the Araucaria Foundation; the General Superinten-
dence of Science, Technology and Higher Education
(SETI); and NAPI Robotics.
REFERENCES
A. B. Costa, J. M. P. (2023). Tend
ˆ
encias em rob
´
otica para
inspec¸
˜
ao de sistemas el
´
etricos de pot
ˆ
encia. Encontro
Nacional de Engenharia, 12(1):58–65.
Alhassan, A. B., Zhang, X., Shen, H., and Xu, H. (2020).
Power transmission line inspection robots: A review,
trends and challenges for future research. Interna-
tional Journal of Electrical Power & Energy Systems,
118:105862.
Bayındır, L. (2016). A review of swarm robotics tasks. Neu-
rocomputing, 172:292–321.
Chai, R., Guo, Y., Zuo, Z., Chen, K., Shin, H.-S., and Tsour-
dos, A. (2024). Cooperative motion planning and
control for aerial-ground autonomous systems: Meth-
ods and applications. Progress in Aerospace Sciences,
146:101005.
de Albuquerque, J. M. N., Neto, O. R., Arm
ˆ
enio, G. F.,
Corr
ˆ
ea, V. M., do Valle, D. R. G., Domingues, A.,
Rohrich, R. F., and de Oliveira, A. S. (2024). A
novel method for multi-modal predictive inspection of
power lines. IEEE Access, 12:184680–184691.
Jiang, W., Liu, R., Yang, Y., Wan, S., Guo, X., Jiao, Z., and
Yu, H. (2018). Design and implementation of a new
climbing robot for high voltage transmission tower.
IOP Conference Series: Materials Science and Engi-
neering, 428(1):012071.
R. P. Almeida, L. F. Souza, M. J. C. (2022). T
´
ecnicas
avanc¸adas de inspec¸
˜
ao automatizada em linhas de
transmiss
˜
ao. Revista Brasileira de Engenharia
El
´
etrica, 17(3):215–229.
Rohrich, R. F., Valle, D. G. D., Albuquerque, J. M. N. D.,
Neto, O. R., Oliveira, A. S., and Oliveira, A. S. D.
(2023). A robotic cable-gripper for reliable inspection
of transmission lines. In Proceedings of the IEEE In-
ternational Symposium on Robotics and Automation.
T. A. Silva, R. F. Gomes, P. V. L. (2020). Rob
ˆ
os
para inspec¸
˜
ao em ambientes energizados: desafios e
soluc¸
˜
oes. Revista de Automac¸
˜
ao e Controle, 14(2):89–
97.
Wang, L. and Wang, H. (2016). A survey on insulator in-
spection robots for power transmission lines. pages
1–6.
Y. Zhang, L. Chen, H. W. (2021). Ai-based navigation for
power line inspection robots. IEEE Transactions on
Industrial Informatics, 17(5):3420–3430.
Zhu, B., Zhang, X., Zhang, H., Liang, J., Zang, H., Li, H.,
and Wang, R. (2020). Design of compliant mecha-
nisms using continuum topology optimization: A re-
view. Mechanism and Machine Theory, 143:103622.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
266
