
Wind Farm Power Prediction Using a Machine Learning Surrogate
Model from a First-Principles Simulation Model
Sebastian E. Pralong
1a
, Samuel Martínez-Gutiérrez
2b
, Dan E. Kröhling
1c
, Alejandro Merino
2d
,
Gonzalo E. Alvarez
1e
, Daniel Sarabia
2f
and Ernesto C. Martínez
1g
1
Instituto de Desarrollo y Diseño INGAR (CONICET/UTN), Avellaneda 3657, S3002GJC, Santa Fe, Argentina
2
Departarmento de Digitalicación, Avda. Cantabria s/n., Universidad de Burgos, 09006 Burgos, Spain
Keywords: Renewable Energy, Machine Learning, Real-Time Forecasting, Energy Management.
Abstract: Reliable forecasting of wind farm power generation is essential for ensuring seamless grid integration and
optimizing energy management strategies. This paper presents an integrated framework combining a first-
principles simulation model of wind turbines as a data source for machine learning techniques to forecast
wind farm power output. The simulation model accounts for wind speed, direction, temperature, and other
climate variables, and is computationally intensive due to the need to account for the dynamics of each turbine
operation, the wake effects, etc. To diminish the computational cost, this work introduces a surrogate Gaussian
Processes (GPs) model that approximates the complex simulation model to provide predictions of both the
mean and variance of power generation. To forecast future climate conditions, we employ a NARX (Nonlinear
Autoregressive with Exogenous Inputs) neural network trained on historical data to account for wind speed,
direction, and atmospheric conditions for the next two hours. The NARX model forecasts and the GPs
predictions enable fast and accurate real-time forecasting of power generation for the entire wind farm. This
approach significantly reduces computational times from hours to seconds while maintaining high accuracy,
offering a scalable and efficient solution for real-time wind farm power prediction and online optimization.
1 INTRODUCTION
Wind energy has become a pillar of renewable energy
systems and has played an integral part in
international efforts to decrease carbon emissions and
attain sustainable energy objectives (Ali & Meo,
2024). The integration of wind farms into grids is not
an easy task due to the intrinsic variability of wind
and its effect on output. Predicting the output of wind
farms accurately and in a timely manner is crucial for
optimal grid management, scheduling energy, and
operational optimization (Landberg, 1999). The
conventional first-principles simulation models that
capture the intricate nature of wind turbine operations
and environmental interactions are highly accurate
a
https://orcid.org/0009-0007-5797-5246
b
https://orcid.org/0000-0003-1790-9344
c
https://orcid.org/0000-0002-3115-1800
d
https://orcid.org/0000-0002-8301-7195
e
https://orcid.org/0000-0003-1602-8051
f
https://orcid.org/0000-0001-7802-3542
g
https://orcid.org/0000-0002-2622-1579
but have high computational expense and take hours
for a single simulation of a single instance (Douvi &
Douvi, 2023). Their use for real-time prediction and
online optimization is therefore unfeasible due to high
computational times. New developments in machine
learning have provided an opportunity for solving this
issue by creating surrogate models that are
approximations of expensive simulations but with a
minute fraction of the computational demand.
In this article, an original framework is presented
that couples a control oriented first-principles
simulation model with machine learning methods for
rapid and accurate prediction of wind farm power
output.
This paper employs modular, first-principles-
Pralong, S. E., Martínez-Gutiérrez, S., Kröhling, D. E., Merino, A., Alvarez, G. E., Sarabia, D. and Martínez, E. C.
Wind Farm Power Prediction Using a Machine Learning Surrogate Model from a First-Principles Simulation Model.
DOI: 10.5220/0013709700003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 417-424
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
417
based models in EcosimPro (EA International, 2024),
balancing accuracy and simplicity. These models
simulate turbine power output with minimal
parameters, omitting detailed aerodynamic or
electrical submodels. Integrated controls manage
turbine startup, shutdown, rotor orientation, and
power output, with wind farms modeled to include
wake interactions but not energy transport. Compared
to tools like OpenFAST or SOWFA, EcosimPro
models are suited for control-oriented and system-
level simulations.
The simulator’s key advantage is generating high-
quality synthetic data for data-driven algorithms.
Real-world data is often limited by privacy,
proprietary restrictions, or sensor issues (Li et al.,
2020). The simulator explores all input combinations
(wind speed, direction, control modes), creating
comprehensive datasets that prevent poor
generalization or hallucinations in neural networks,
supporting robust AI model development for wind
farm control and optimization.
We employ a Gaussian Process (GP) surrogate
model to approximate the computationally intensive
simulation model, predicting mean and variance of
wind farm power output based on environmental
variables like wind speed, direction, and air pressure.
For climate forecasts, a Nonlinear Autoregressive
with Exogenous Inputs (NARX) neural network
estimates wind and atmospheric conditions for the
next two hours, offering advantages over public
forecast products due to better adaptation to site-
specific characteristics and lower latency. Integrating
NARX forecasts with the GP model enables fast,
accurate power predictions in seconds, as detailed in
the methodology.
The main aim of the proposed approach is the
establishment of an efficient and scalable framework
for real-time prediction of wind farm power. Through
a combination of a GP surrogate model and a NARX
neural network, we can achieve high accuracy by
utilizing data generated from first-principles
simulations while minimizing computational costs by
orders of magnitude. This makes it applicable in real-
time grid integration, energy management, and online
optimization problems, and provides a robust solution
for improving wind farm operating efficiency.
2 METHODOLOGY
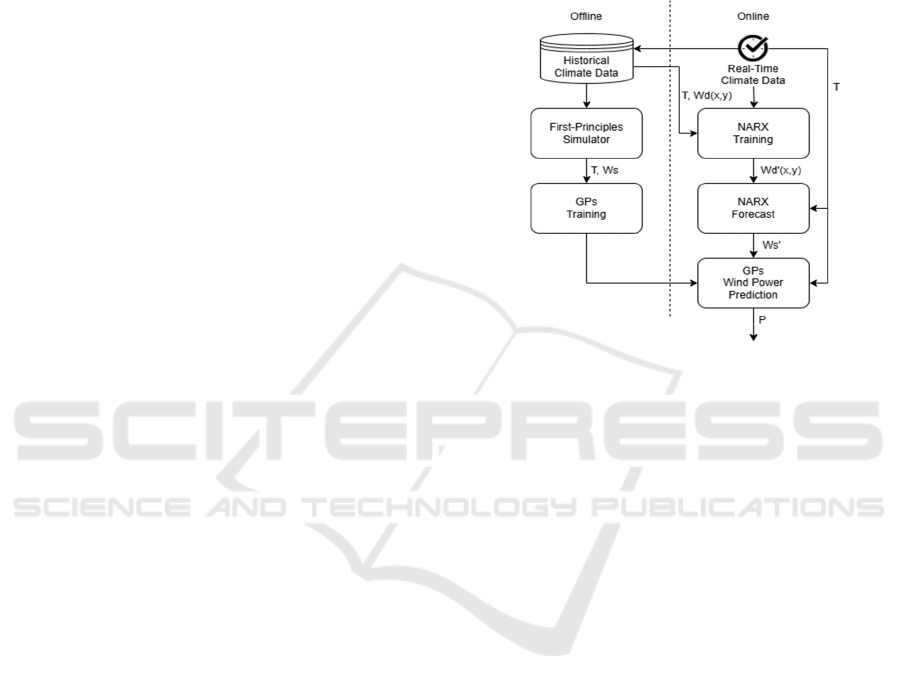
This study employs a two-stage, offline/online
approach to achieve efficient and accurate wind farm
power prediction as it is shown in Figure 1. During
the offline stage, a first-principles simulation model
is used to generate power output data for a wind farm
under varying climate and wind conditions,
accounting for turbine dynamics and wake effects.
These simulations provide the foundational dataset
for training a Gaussian Processes (GPs) surrogate
model, which approximates the computationally
intensive simulation model while delivering rapid
predictions with uncertainty quantification.
Figure 1: Methodological approach.
During the online stage, as real-time data is
acquired, a Nonlinear Autoregressive with
Exogenous Inputs (NARX) neural network is trained
on historical meteorological data to forecast wind
speed, direction, and atmospheric variables over short
time horizons. The integration of the NARX-based
forecasts with the GP model allows for fast, reliable
power output estimations, bridging the gap between
accuracy and computational efficiency. Within this
methodology, synthetic data can be substituted with
real historical data.
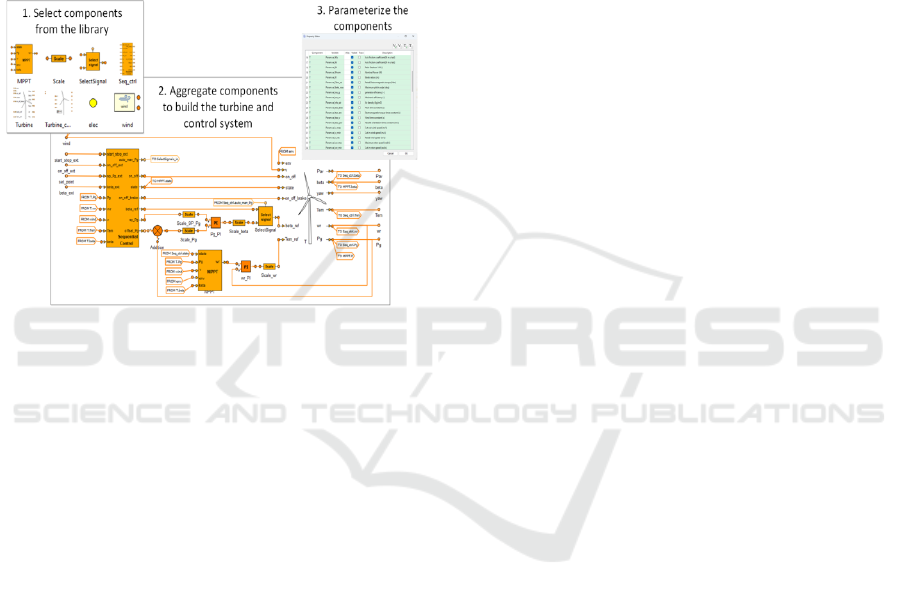
2.1 First-Principles Simulator
The simulator used as a data source for this work has
been developed as a modular library of dynamic
models in the EcosimPro platform. The simulator is
designed to bridge the gap between highly detailed
tools such as OpenFAST (OpenFAST, 2024) and
low-complexity solutions like the WindPowerPlants
Modelica library (Eberhart, 2015), offering a balance
between modeling accuracy and computational
efficiency. Its main purpose is to support control
design and operational optimization of wind farms,
enabling fast execution on standard computing
systems. The structure can be observed in Figure 2.
The wind turbine model is based on a two-mass
mechanical representation, capturing the torsional
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
418
dynamics between the rotor and the generator through
a flexible shaft. The model includes local control
systems for rotor speed and generated power,
implemented with Proportional-Integral (PI)
controllers. Turbines are assumed to be of the doubly-
fed induction generator (DFIG) type, and the control
logic accommodates both pitch regulation and rotor
speed tracking to implement maximum power point
tracking (MPPT) strategies. Besides power
generation control, the overall control system
implemented includes turbine startup and shutdown
and rotor orientation to current wind direction.
Figure 2: Structure of the EcosimPro Platform.
In addition to individual turbine dynamics, the
simulator accounts for wake effects using the multiple
shadow Jensen/Katic model. This approach estimates
the wind speed reduction at each turbine due to
upstream turbines, considering thrust coefficients,
and supporting the modeling of partial wake overlap.
This enables a realistic prediction of power losses due
to turbine interaction within the farm.
At the wind farm level, the simulator implements
several centralized control strategies compatible with
the local control systems, with built-in mechanisms
for safe mode switching and fault handling.
2.2 Gaussian Process
Gaussian Processes (GPs) (Rasmussen & Williams,
2019) are machine learning models used for
regression tasks that provide predictions and
confidence intervals. One of their advantages is the
ability to model complex interactions between
variables without explicit parameterization. Thanks
to this flexibility, GPs can adapt to different types of
data. Equation 1 shows the general form of a GP.
𝑓(𝑥) ∼ 𝐺𝑃 (𝑚(𝑥), 𝑘(𝑥, 𝑥′)) (1)
where the mean function is 𝑚(𝑥) (usually set to
0), and 𝑘(𝑥, 𝑥′) is the covariance function or kernel
between each pair of elements. In this work, each
element is a vector comprising two variables at each
point in time: wind speed and temperature. These
variables were selected over others due to their higher
correlation with wind power generation, as it was
determined from historical data analysis (see Section
4.2). Moreover, the GP is a multivariate GP, as two
variables are considered.
The kernel is used to define the similarity between
two elements 𝑥 and 𝑥′. In this work, the GP is a sum
of two kernels. The first is a Matérn kernel
(Pedregosa et al., 2011) with two hyperparameters:
the length scale 𝑙, which is set to 5, and an additional
parameter 𝜈 that controls the smoothness of the
resulting function, which is set to 1.5. The second is
a constant kernel that allows for incorporating the
mean value of the measurements. The kernel and
hyperparameters values were selected after
conducting a hyperparameter optimization.
2.3 NARX Neural Network
Nonlinear Autoregressive Network with Exogenous
Inputs (NARX) (Siegelmann et al., 1997) is a type of
recurrent neural network designed to model dynamic
systems whose evolution depends on both their past
values and external inputs. This architecture is
particularly suitable for tasks such as time series
prediction and modelling of non-linear dynamic
systems. The main advantage of NARX networks lies
in their ability to capture complex temporal
relationships with a trainable and efficient
architecture. These networks are widely used in
modelling and prediction in areas such as renewable
energy, economics, control engineering and fault
diagnosis (Hansda & Murmu, 2023).
Mathematically, a NARX network models the
output y(t) as a function of a series of past values of
the output itself and one or more external inputs x(t),
according to the following structure:
𝑦(𝑡) =𝐹(𝑦(𝑡−1),..,𝑦(𝑡−𝑑𝑦);
(2)
𝑥(𝑡−1),..,𝑥(𝑡−𝑑𝑥))
where y(t) is the system output at time t, x(t) is the
exogenous input to the system, dy, dx are the output
and input delays, respectively, and F is the nonlinear
function approximated by the network.
There are two main modes of operation in NARX
neural networks (Rahman et al., 2022). Open-loop
mode: during training, past actual values of the output
are used as feedback. Closed-loop mode: during
simulation or future prediction, the network is fed
Wind Farm Power Prediction Using a Machine Learning Surrogate Model from a First-Principles Simulation Model
419

with its own estimated outputs, allowing long-term
behavior to be predicted without relying on actual
future data.
2.3.1 Neural Network Structure
The dataset is provided by a nearby weather station in
table format and includes columns representing
meteorological variables temperature and wind
components for which data are taken every 30
minutes. It is chosen to work with the perpendicular
wind components instead of wind direction and
modulus (wind speed) to avoid problems of
continuity in angles and training errors. For example:
an angle of 0º and 350º are numerically distant but
physically not. To fit the data to a NARX neural
network, all values are normalized between 0 and 1.
This normalization is performed using the minimum
and maximum values per column, previously
extracted from the network configuration.
A NARX type neural network is created using the
narxnet function available in Matlab software
(Matlab, n/d). The network is set in open-loop
training mode, which allows using the real data
passed as feedback during the training phase.
The network structure has component values to be
defined. Input layer: receives the past values of both
the output variable and the exogenous variables. A
delay of 4 time steps is used, so that the inputs at
instant t correspond to the values at t-1, t-2, t-3 and t-
4. Hidden layer: Composed of 10 neurons, each of
which employs the sigmoidal tangent transfer
function (tansig). This non-linear function allows the
network to model complex, non-linear relationships
between input and output variables. Output layer: It
uses a linear transfer function (purelin) that allows
predictions to cover the entire real range of values,
which is indispensable for continuous physical
variables such as wind speed. The network was
trained using the Levenberg-Marquardt
backpropagation algorithm, which is particularly
effective for problems with a relatively small number
of parameters and well-conditioned inputs, which
matches the characteristics of our experimental setup.
InputDelays = 1:4: uses the previous 4 values of the
inputs as the temporal context, in this case the two
wind components. FeedbackDelays = 1:4: uses the 4
previous values of the output as feedback.
2.3.2 Training, Prediction and Evaluation
The data are divided into the exogenous input time
series and output (target) which corresponds to the
endogenous feedback variables. The network is
trained (Figure 3) on the ‘W’ weights and ‘b’ biases
of both layers in open loop mode using the
normalized data. After training, the network is
converted to the closed-loop mode as shown in Figure
3, allowing it to predict autonomously, using its own
outputs as feedback. The prediction of future values
is then performed with this closed-loop network using
its own forecast data as input.
Figure 3: Changing the network from open to closed loop.
3 TEST CASE
As a case study, a mathematical model has been
developed for a fictitious park using the topology and
location of a real wind farm (El Valle-Valdenavarro)
in Navarra, Spain. Specifically, at geographical
coordinates: Latitude: 41°55’18.9’’ Longitude: -
1°25’46.9’’. The wind farm consists of 14 turbines
assumed to be of the NREL 5MW type and
parameterized according to the values available in
(Jonkman, J, et al 2009). The relative wind turbine
locations are shown in Figure 4.
One of the key aspects when simulating the
dynamic behavior of wind farms is the availability of
wind data at the specific locations where these farms
are situated. In this work, mesoscale data from the
New European Wind Atlas (NEWA, 2022) has been
used. This website provides meteorological data
every 30 minutes across the European Union for the
period from 2005 to 2018, obtained using the Weather
Research & Forecasting Model (WRF) (Witha et al.,
2019).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
420
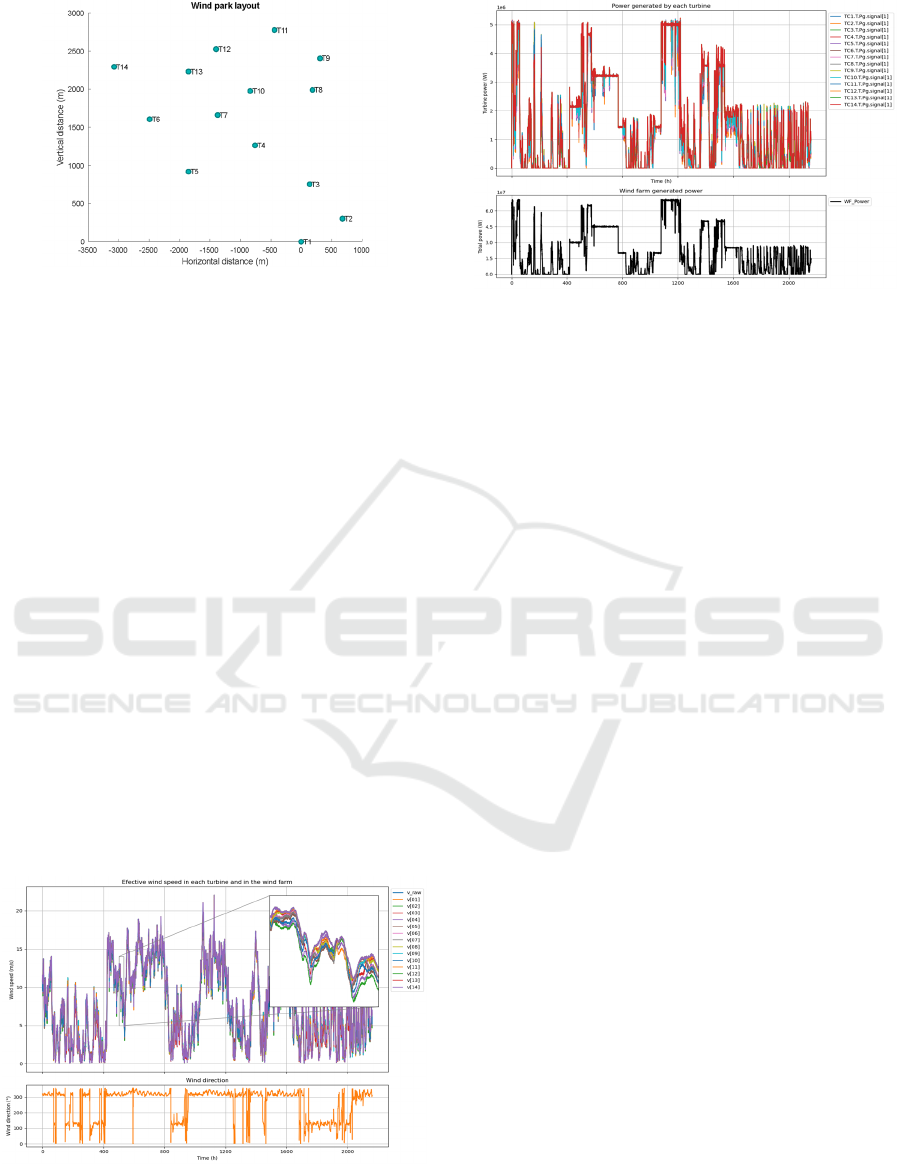
Figure 4: Layout of the turbines for the case study farm.
4 ANALYSIS OF RESULTS
4.1 Running on the Simulator
To generate the synthetic data needed to train the GP
model, the generation plant described in the previous
section was simulated over a three-month period,
with data recorded every 30 seconds. The wind farm
setpoint was set to 75 MW, exceeding the nominal
capacity of the wind farm (70 MW). As a result, the
turbines operated at their maximum possible output,
determined solely by wind conditions, effectively
running without curtailment and extracting the
maximum available power.
Some results of the simulation that are fed to the
GP model are presented next. Figure 5 and Figure 6
shows the undisturbed wind speed (v_raw) and the
effective wind speed at each turbine, estimated using
wake effect calculations, for a selected simulation
period. It can be observed that, depending on the wind
direction, the effective wind speed incident on each
turbine varies according to the wind farm layout.
Figure 5: Upper graph, wind speed data for each turbine.
Lower graph, wind direction data.
Figure 6: Upper graph, power generated by each turbine.
Lower graph, total power generated by the wind farm.
4.2 Gaussian Process Model Training
To train the GP, a number of variables are considered
as explanations for the total power generation of the
wind farm. The variables studied encompass: (a)
Total power generation, (b) Time of the day, (c) Air
density, (d) Temperature, (e) Atmospheric pressure,
(f) Wind speed, and (g) Wind direction. The predicted
variable is (a) Total power generation, while the
others are the possible predicting variables.
Figure 7 presents the correlation analysis between
variables. Based on the analysis, (f) Wind Speed and
(d) Temperature were selected as explanatory
variables due to their respective correlations of 0.95
and -0.33 with the target variable (a). Variable (c) Air
Density was excluded due to its high correlation with
(d) Temperature (-0.93), which was already included
as a predictor. Wind direction was not addressed in
this first trained model in order to simplify the
analysis and focus on the methodological aspects.
A multivariate GP model was developed to
predict wind farm power output using temperature
and wind speed as input features. The scope of this
study is limited to short-term (intraday) forecasting.
Wider temporal generalization may be crucial in
training over annual cycles and seasonal strategies.
Thus, the model is trained on data collected over a
period of three months, with measurements taken
every 30 minutes. Only two and a half months are
used as training data, resulting in a total of 3,600
training samples, while the remaining 15 days are
used for testing. The training took approximately 4
minutes. The R
2
score obtained by the GP is 0.9986.
Wind Farm Power Prediction Using a Machine Learning Surrogate Model from a First-Principles Simulation Model
421
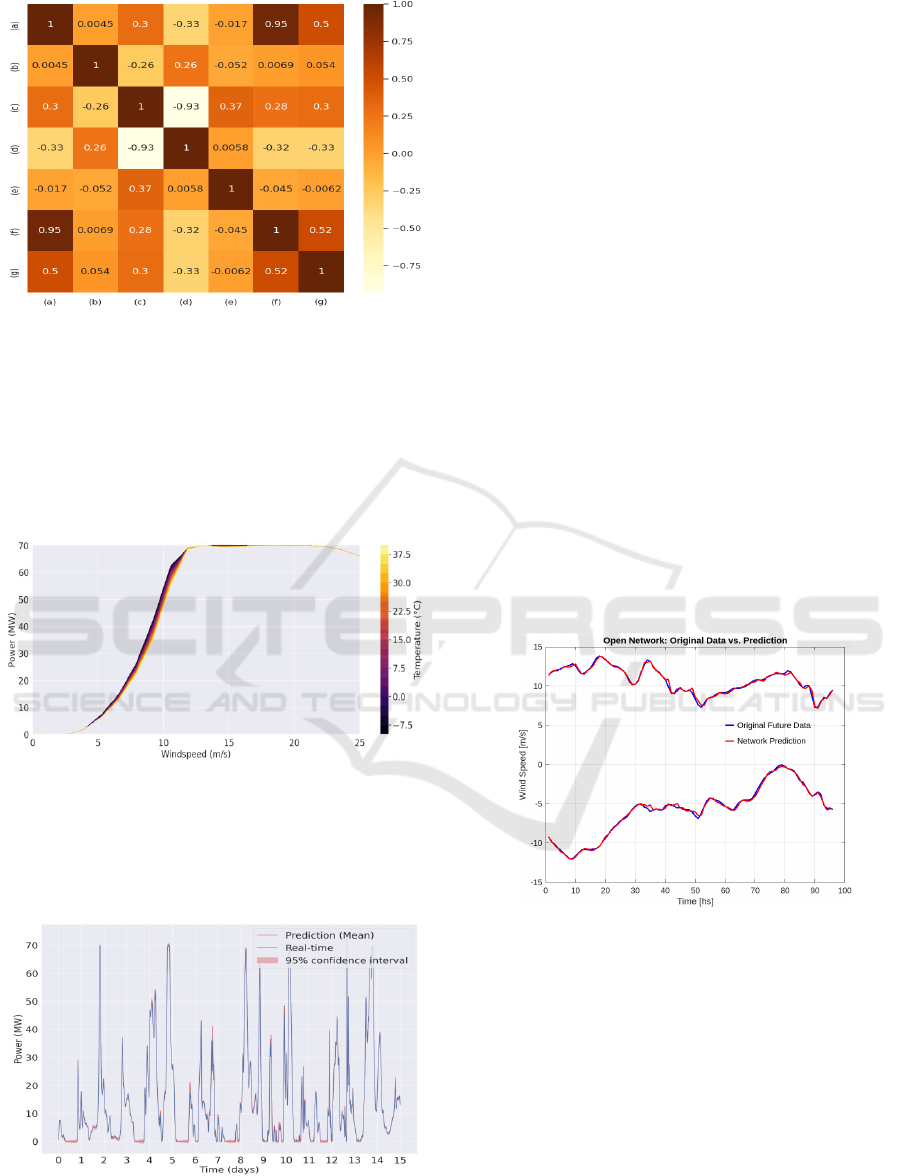
Figure 7: Correlation between variables.
Figure 8 provides a projected view of the fitted
GP, enabling comparison of the total power output
under different wind speed conditions. Temperature
is depicted using a color gradient, effectively
highlighting its impact on power generation. This
curve serves as a reliable foundation for modeling the
aggregate behavior of the wind farm.
Figure 8: Wind farm power under wind speed conditions.
Figure 9 presents the validation results over a 15-
day horizon, with predictions made at 60-second
intervals, resulting in 21,600 data points. The total
computation time for the forecast was 17 seconds.
Figure 9: GP validation results over a 15-day horizon.
4.3 Forecasting with NARX Networks
In order to evaluate the trained NARX network and
its forecasts, different points in time are taken within
the data series where the wind parameters in the wind
farm change substantially. The whole training
process is repeated for each new time selected.
Data is taken every 30 minutes using the last 100
measurements to train the network in each case.
Temperature is used as the exogenous input, and the
north-south and east-west wind components serve as
the endogenous outputs with feedback. The network
is trained in an open loop with the normalized time
series data and uses the 4 previous time values of the
inputs as historical context. The network is
configured as discussed in the methodology section
2.3.1 and 2.3.2. Figure 10 shows the open-loop
network fitted after training with 100 data of the
series for a particular time of the dataset. During
open-loop training, the mean square error (MSE) is
used, and a decrease in MSE is observed in the
training, validation, and test sets. This procedure is
repeated at different times during the training series.
The best validation performance is achieved in epoch
5. This value represents the optimal point of
generalization, thus avoiding overfitting. The training
time is approximately 8 seconds.
Figure 10: Open-loop model fitting.
The network model is switched from open-loop to
closed-loop to make the prediction for the next two
hours. The predictions of both wind components are
obtained denormalized as shown in Figure 11, where
both components (blue) are plotted with their
predictions (red) for the next 30, 60, 90 and 120
minutes. Using these data and predictions we can
obtain Figure 12 where the modulus and direction of
the velocity is represented, it can be observed how the
main variable that introduces error to the model is the
wind modulus (wind speed).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
422
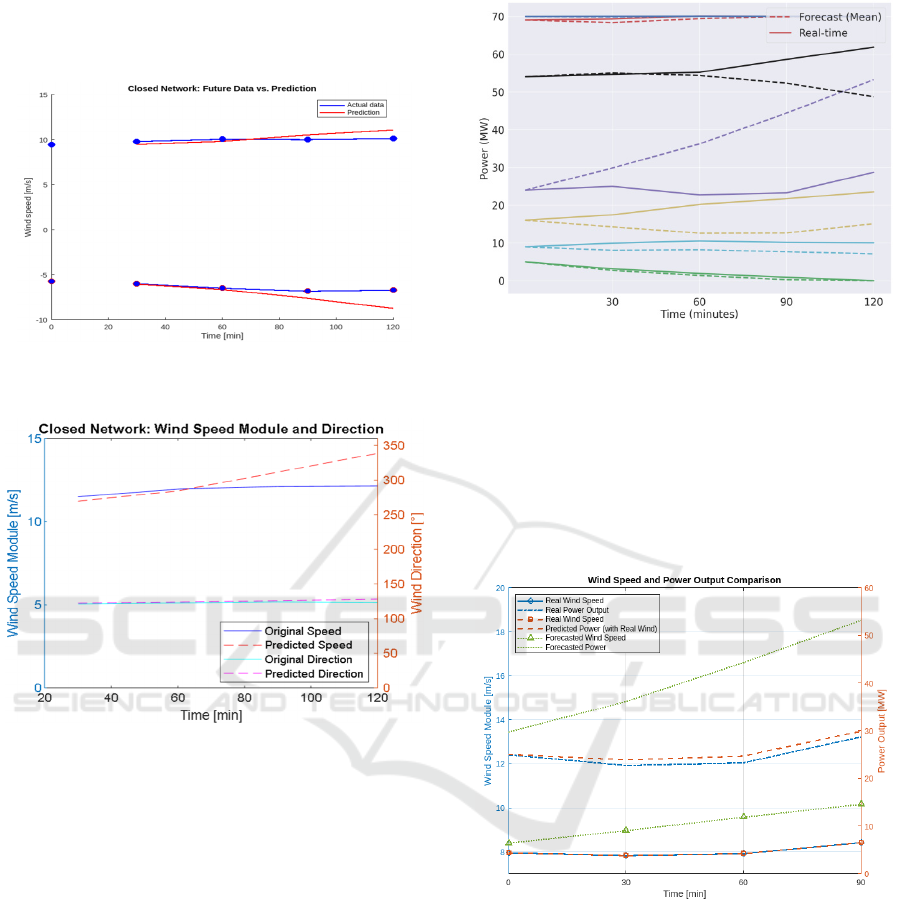
The normalized Root Mean Square Error (RMSE)
prediction error for the two-hour forecast is estimated
to average 11.19%.
Figure 11: Comparison of real data and prediction for the
perpendicular wind components for the next 2 hours.
Figure 12: Comparison of real data and predictions in wind
modulus (speed) and direction for the next 2 hours.
4.4 Power Forecasting
The two wind component predictions generated by
the NARX model are condensed into a velocity
module and used, like temperature, as input to the GP-
based surrogate model to estimate wind farm power
generation. This allows power forecasts to be made
two hours in advance, maintaining high fidelity with
respect to the original physical model.
The power predictions obtained through this
integration agree well with the actual data, as shown
in Figure 13. The normalized RMSE is 14.88% for
the two-hour period, and the maximum normalized
error at 30 minutes is 16.13%. This indicates a
relatively low prediction error and showcases the
model's effectiveness while allowing for quick and
reliable estimates, making it suitable for operational
decision-making in wind energy systems.
Figure 13: Comparison of power predictions between
actual, real-time data and forecasts.
In Figure 14, the GP model (orange dashed line)
closely matches the observed wind data, whereas the
fit is poorer when using wind speed forecasts (green
dashed line). This reflects that the biggest error of the
power forecast is introduced by the NARX wind
forecast model, comparing forecasted and real wind
speed. This is a point to be improved in the future.
Figure 14: Comparison of GP model forecasts with respect
to actual and predicted wind values.
5 CONCLUDING REMARKS
This research presents a framework for wind farm
power prediction using a first-principles simulation
model to generate synthetic data from a wind farm
with 14 NREL 5MW turbines, including turbine and
farm-level controls and wake effects. A Gaussian
Process surrogate model approximates the simulation
for fast, accurate power predictions, enhanced by a
NARX neural network for short-term climate
Wind Farm Power Prediction Using a Machine Learning Surrogate Model from a First-Principles Simulation Model
423

forecasts. This reduces computation time from hours
to seconds, enabling real-time grid integration and
energy management while maintaining accuracy, thus
improving wind farm efficiency and renewable
energy adoption.
6 FUTURE WORK
Future work will extend the framework by adding
wind direction to the GP surrogate model to improve
power prediction accuracy. Efforts will also focus on
enhancing wind speed forecast accuracy beyond one
hour using advanced models or geographically
distributed meteorological data. Additionally,
applying the framework to diverse wind farm
configurations and environmental variables will
increase prediction robustness.
ACKNOWLEDGEMENTS
Research partially supported by CONICET and UTN.
The paper is also part of the projects: ‘Optimal
Real-Time Management of the Power-to-H2-to-Power
cycle (OptiMaPH2P)’, TED2021-131220B-I00, funded
by MCIN/AEI and by the European Union
‘NextGenerationEU’ and the project ‘Optimal real-time
management under uncertainty for digital twins (OptiDit)’,
PID2021-123654OB-C33, funded by MCIN and by the
European Union ‘FEDER’. This paper is also part of the
Doctoral Thesis of Samuel Martínez-Gutiérrez, funded with
a pre-doctoral contract for University Teacher Training
(FPU), call 2022, awarded by the MUNI of Spain.
REFERENCES
Ali, S., & Meo, M. S. (2024). How wind-based renewable
energy contribute to CO2 emissions abatement?
Evidence from Quantile-on-Quantile estimation.
International Journal of Environmental Science and
Technology: IJEST, 21(9), 6583–6596. https://doi.
org/10.1007/s13762-023-05409-3
Douvi, E., & Douvi, D. (2023). Aerodynamic
characteristics of wind turbines operating under hazard
environmental conditions: A review. Energies, 16(22),
7681. https://doi.org/10.3390/en16227681
EA Internacional (2024). EcosimPro, Modelling and
Simulation Toolkits and Services.
Eberhart, P., Chung, T. S., Haumer, A., & Kral, C. (2015,
September). Open source library for the simulation of
wind power plants. In Proceedings of the 11th
International Modelica Conference (Vol. 2, p. 4).
Linköping University Electronic Press Versailles,
France.
Hansda, R., & Murmu, R. (2023). Wind speed forecasting
using artificial neural networks: A comparative study.
2023 International Conference on Sustainable
Communication Networks and Application (ICSCNA),
1183–1189.
Jonkman, J, et al. "Definition of a 5-MW Reference Wind
Turbine for Offshore System Development." , Jan.
2009. https://doi.org/10.2172/947422
Landberg, L. (1999). Short-term prediction of the power
production from wind farms. Journal of Wind
Engineering and Industrial Aerodynamics,
80(1–2), 207–220. https://doi.org/10.1016/s CID:
10.1007/s40860-021-00166-x
Li, J., Zhan, Z., Wang, C., Jin, H., & Zhang, J. (2020).
Boosting Data-Driven Evolutionary Algorithm With
Localized Data Generation. IEEE Transactions on
Evolutionary Computation, 24, 923-937. https://doi.
org/10.1109/TEVC.2020.2979740
Matlab. MathWorks. (n.d.). MATLAB Online. The
MathWorks, Inc. https://matlab.mathworks.com/
NEWA (2022). The New European Wind Atlas (NEWA)
https://map.neweuropeanwindatlas.eu/ (accessed sept
12, 2024).
OpenFast (2024). https://github.com/OpenFAST/openfast
(accessed sept 12, 2024).
Pedregosa, F., et al. (2011). Scikit-learn: Machine Learning
in Python. The Journal of Machine Learning Research,
12, 2825–2830.
Rahman, M. M., et al. (2022). A comprehensive study and
performance analysis of deep neural network-based
approaches in wind time-series forecasting. Journal of
Reliable Intelligent Environments. https://doi.org/10.
1007/s40860-021-00166-x
Rasmussen, C. E., & Williams, C. K. I. (2019). Gaussian
processes for machine learning. MIT Press. https://doi.
org/10.7551/mitpress/3206.001.0001
Siegelmann, H. T., Horne, B. G., & Giles, C. L. (1997).
Computational capabilities of recurrent NARX neural
networks. IEEE Transactions on Systems, Man, and
Cybernetics. Part B, Cybernetics: A Publication of the
IEEE Systems, Man, and Cybernetics Society, 27(2),
208–215. https://doi.org/10.1109/3477.558801
Witha, B., Hahmann, A.N., TSīle, T., Dörenkämper, M.,
Ezber, Y., García-Bustamante, E., González-Rouco,
J.F., Leroy, G., and Navarro. J. (2019). Report on WRF
model sensitivity studies and specifications for the
mesoscale wind atlas production runs. https://doi.org/
10.5281/zenodo.2682603.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
424
