
Reinforcement Learning for Model-Free Control of a Cooling Network
with Uncertain Future Demands
Jeroen Willems
1
, Denis Steckelmacher
2
, Wouter Scholte
1
, Bruno Depraetere
1
, Edward Kikken
1
,
Abdellatif Bey-Temsamani
1
and Ann Nowé
2
1
Flanders Make, Lommel, Belgium
2
Vrije Universiteit Brussel, Belgium
fi fl fi
Keywords:
Predictive Control, Reinforcement Learning, Thermal Systems Control.
Abstract:
Optimal control of complex systems often requires access to a high-fidelity model, and information about the
(future) external stimuli applied to the system (load, demand, ...). An example of such a system is a cooling
network, in which one or more chillers provide cooled liquid to a set of users with a variable demand. In this
paper, we propose a Reinforcement Learning (RL) method for such a system with 3 chillers. It does not assume
any model, and does not observe the future cooling demand, nor approximations of it. Still, we show that, after
a training phase in a simulator, the learned controller achieves a performance better than classical rule-based
controllers, and similar to a model predictive controller that does rely on a model and demand predictions. We
show that the RL algorithm has learned implicitly how to anticipate, without requiring explicit predictions. This
demonstrates that RL can allow to produce high-quality controllers in challenging industrial contexts.
1 INTRODUCTION
Today, reducing the energy consumption of industrial
systems is a key challenge. Energy reduction can be
achieved by designing more efficient systems, but of-
ten improvements can be made by improving the way
they are controlled. Academically optimization-based
model-based controllers are often proposed when more
advanced control is required. While these are effec-
tive, they introduce significant complexity due to the
need for accurate models and powerful optimizers that
run during system operation. Therefore, in industry
the adoption is still rather limited. In this work, we
explore reinforcement learning (RL) as a simpler, data-
driven alternative that requires neither. We benchmark
its performance against both model-based and simpler
rule-based control (still widely used in industry) by
evaluating them on a thermal system comprised of
three interconnected chillers.
For the model-based controller in this paper, we
consider the optimal control of a dynamic system.
As time passes, with time denoted by
t
, the system
changes state. The state of the system at some time
t
is denoted
x
(
t
). Some control signal applied to the sys-
tem at time
t
is denoted
u
(
t
), and the resulting change
of state is denoted
˙x
(
t
) =
f [x(t),u(t),t]
. The function
f
defines how the system reacts to the control signal.
It also depends on
t
, which allows the function to addi-
tionally depend on non-controlled information, such
as the weather (that we cannot influence), some usage
of the system by clients, etc.
The objective of optimal control is to produce con-
trol signals
u
(
t
) such that, over some time period, a
cost function dependent on the system states is mini-
mized. Instances of optimal control include moving
towards and tracking a setpoint, tracking some (mov-
ing) reference signal, or performing a task while mini-
mizing energy consumption. Methods that attempt to
achieve optimal control range from simple to very com-
plicated, starting from proportional-integral-derivative
controllers (Borase et al., 2021), over optimal feedback
design methods like linear quadratic regularors and H-
infinity (Glover, 2021), to function optimization - such
as gradient methods (Mehra and Davis, 1972), genetic
algorithms (Michalewicz et al., 1992), ant-colony op-
timization (López-Ibáñez et al., 2008), iterated local
search methods (Lourenço et al., 2019) - and especially
optimal control, with its continuous and discrete time,
direct and indirect, and many more variants (Lewis
et al., 2012), and its implementation that adds robust-
ness through feedback called model-predictive control
or MPC (Camacho and Alba, 2013). Conceptually,
MPC observes the current state of the system, then
uses a computational model of it to predict various
Willems, J., Steckelmacher, D., Scholte, W., Depraetere, B., Kikken, E., Bey-Temsamani, A. and Nowé, A.
Reinforcement Learning for Model-Free Control of a Cooling Network with Uncertain Future Demands.
DOI: 10.5220/0013708300003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 59-70
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
59

possible outcomes, so the best-possible control signal
can be chosen by a numerical optimization problem.
Apart from the PID approach, all these methods
share a common trait: they are model-based. They
assume that
f [x(t),u(t),t]
is available, in a represen-
tation that can be used to design a controller or to
compute control signals. This means that the system
must be modelled, along with any function of
t
used
by
f
. When relevant, they further include predictions
on expected future events as well, using the model to
predict how to best anticipate on those events.
However, in the real world, models are never per-
fect, and future demands are not always known per-
fectly. Methods exist to estimate models, or future de-
mands, for instance with Kalman filters (Meinhold and
Singpurwalla, 1983) or machine learning approaches
such as time-series prediction (Frank et al., 2001).
These methods are unfortunately approximate, and
prevent optimal control from being achieved.
We propose to instead use another method of pro-
ducing control signals: Reinforcement Learning (RL)
is a family of machine learning (ML) algorithms that
allows to learn a controller from experience. The im-
portant property of RL, that we explain extensively in
Section 2, is that it is model-free. The RL agent, that
learns the controller, makes no assumption about the
system being controlled, and does not expect to have
access to its state update function
f
or to the future
demands
1
.
RL has already been applied to numerous cases
in research settings, like video games and (simulated)
robotic tasks. Real-life application to industrial appli-
cations is more rare, though there are examples that go
in that direction, like optimizing combustion in coal-
fired power plants (Zhan et al., 2022), cooling for data
centers (Luo et al., 2022), application to Domestic Hot
Water (DHW) systems (De Somer et al., 2017) and
systems of compressors (Chen et al., 2024).
In this paper, we will tackle a cooling problem,
somewhat similar to (Luo et al., 2022), with both
continuous (power levels) as well as discrete (on/off)
control actions, and a non-instantaneous objective to
minimize energy with penalties for frequent on/off
switches. We will use existing RL techniques, and
compare it to other approaches, since like mentioned
above, such a problem would typically be tackled with
MPC-like controllers that use a model, as well as a
prediction of the upcoming demand.
Our contributions are as follows:
•
We explain how to set up and formulate the RL
problem for this application, relying on existing
1
Some RL methods are called model-based because the
RL agent learns an approximate model of
f
, but the true
f
is
still not observed by the agent.
state-of-the-art RL algorithms for solving it.
•
For this application, we present evaluations and
comparisons of a rule-based controller or RBC
(which is the industrial standard), an MPC, and
an RL controller, showing that both MPC and RL
outperform the RBC.
•
We study the impact of imprecise or limited pre-
view information on upcoming demand for the
MPC, and compare it to the RL to show that the
RL learns to anticipate even without being given
explicit preview information.
2 BACKGROUND
2.1 Reinforcement Learning
RL is a machine learning approach that allows to learn
a closed-loop controller from experience with the con-
trolled system. In most of the literature, RL considers
a discrete-time Markov Decision Process (MDP) de-
fined by the tuple
S, A, R, T, µ
0
, γ
, with
S
the space
of states,
A
the space of actions,
R
:
S × A → R
the
reward function that maps a state-action pair to a scalar
reward,
T
:
S × A × S →
[0
,
1] the transition function
that describes the probability that an action in a state
leads to some next state,
µ
0
the initial state distribution,
and γ < 1 the discount factor.
In physical applications, the state-space is usually
a subspace of
R
N
, vectors of
N
real numbers. The
action space can either be discrete, with the action
being one of some finite set of possible actions, or
continuous, with the action space a subspace of R
M
.
RL considers multi-step decision making. Time is
divided in discrete time-steps, and several time-steps
form an episode. When an episode ends, the MDP
is reset to an initial state drawn from
µ
0
, and a new
episode starts. The objective of a RL agent is to learn
an optimal (possibly stochastic) policy
π
(
a|s
) such
that, when following that policy, the expected sum of
discounted rewards
∑
t
γ
t
R
(
s
t
, a
t
∼ π
(
s
t
)) per episode
is as high as possible.
For RL the learning agent does not have to have
access to the reward or transition functions, it can get
by with just evaluations, by e.g. interacting physically
with a non-modelled plant. As such, the reward func-
tion can be implemented in any way suited for the task,
and the transition function does not even have to exist
in a computer format.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
60

2.2 POMDPs
Partially-Observable Markov Decision Processes
(Monahan, 1982) (POMDP) consider the setting in
which the agent does not have access to the state of
the process being controlled, but only a (partial) ob-
servation. A POMDP extends the MDP with the
O
observation space, and the Ω :
S → O
observation func-
tion. The reward function still depends on the state:
the agent is now rewarded according to information it
may not observe.
POMDPs are extremely challenging to tackle, as
the framework does not impose any lower bound on
what the agent observes. No general solution is there-
fore available. However, methods that try to infer what
the hidden state is (Roy and Gordon, 2002), methods
in which the agent reasons about past observations
using recurrent neural networks (Bakker, 2001), and
methods that give a history of past observations as in-
put to the agent (Mnih et al., 2015; Shang et al., 2021)
currently perform the best.
We observe that POMDPs still assume that there
is a hidden state, from which the reward function and
next state are computed. This is not the case in the
setup we introduce later, in which the future demand
of cooling is not known to the agent, and not part of
the state. It is an external signal that, in the real world,
comes from the users and is not modeled. We still
observe that the ’history of past observations’ approach
to POMDPs helps the agent in our setup, even if our
setup is even more complicated than a POMDP.
2.3
Reinforcement Learning Algorithms
RL algorithms allow an agent to learn a (near-)optimal
policy in a Markov Decision Process. In this article,
we focus on on-line model-free RL algorithms: they in-
teract with the environment (or a simulation of it), and
learn from these interactions without using a model of
the environment, or trying to learn one.
2
Such RL algorithms are divided in three main fam-
ilies: value-based, that learn how good an action is
in a given state, policy-based, that directly learn how
much an action should be performed in a state, and
actor-critic algorithms, that learn both a value function
and a policy.
The best-known value-based algorithms are of the
family of Q-Learning (Watkins and Dayan, 1992),
with modern implementations being DQN (Mnih et al.,
2015) and its extensions, such as Prioritized DQN,
2
The simulator itself may be considered a model of the
environment, but can be approximate, does not need to be
differentiable, and is not given to the agent.
Dueling DQN or Quantile DQN, discussed and re-
viewed by (Hessel et al., 2018). The main proper-
ties of value-based algorithms is that they are sample-
efficient, they learn with few interactions with the en-
vironment, but are in the vast majority of cases only
compatible with discrete actions. Despite some con-
tributions in that direction (Van Hasselt and Wiering,
2007; Asadi et al., 2021), value-based algorithms do
not scale well to, or do not match policy-based meth-
ods in high-dimensional high-complexity continuous-
action industrial tasks.
Policy-based algorithms historically started with
REINFORCE (Williams, 1992), followed by Policy
Gradient (Sutton et al., 1999), still the basis of al-
most every current policy-based or actor-critic algo-
rithm. Most modern policy-based algorithms are actu-
ally actor-critic, because they learn some sort of value
function (or Q-Values) in parallel with training the
actor with a variation of Policy Gradient. Examples
include Trust Region Policy Optimization (Schulman
et al., 2015), Proximal Policy Optimization (Schulman
et al., 2017) and the Soft Actor-Critic (Haarnoja et al.,
2018), the current state of the art. Deterministic Policy
Gradient (Silver et al., 2014) (DPG) is worth mention-
ing because it learns a deterministic policy (given a
state, it produces an action), as opposed to the other
approaches that are stochastic (given a state, they pro-
duce a probability distribution, usually the mean and
standard deviation of a Gaussian). A modern variant
of deep DPG (DDPG) is TD3 (Fujimoto et al., 2018),
that combines DDPG with advanced algorithms for
training the critic.
The main advantage of policy-based and actor-
critic algorithms is that they are compatible with con-
tinuous actions. In this article, we therefore focus
on them, and use Proximal Policy Optimization in
particular, after we observed that it outperforms the
Soft Actor-Critic in our setting. A plausible expla-
nation for this surprising result (SAC is more recent
than PPO) is that SAC relies heavily on a state-action
critic, itself built on the mathematical assumptions of
a Markov Decision Process. Because our task is a
Partially-Observable Markov Decision Process, the
PPO algorithm, that makes less assumptions, is able
to learn more efficiently.
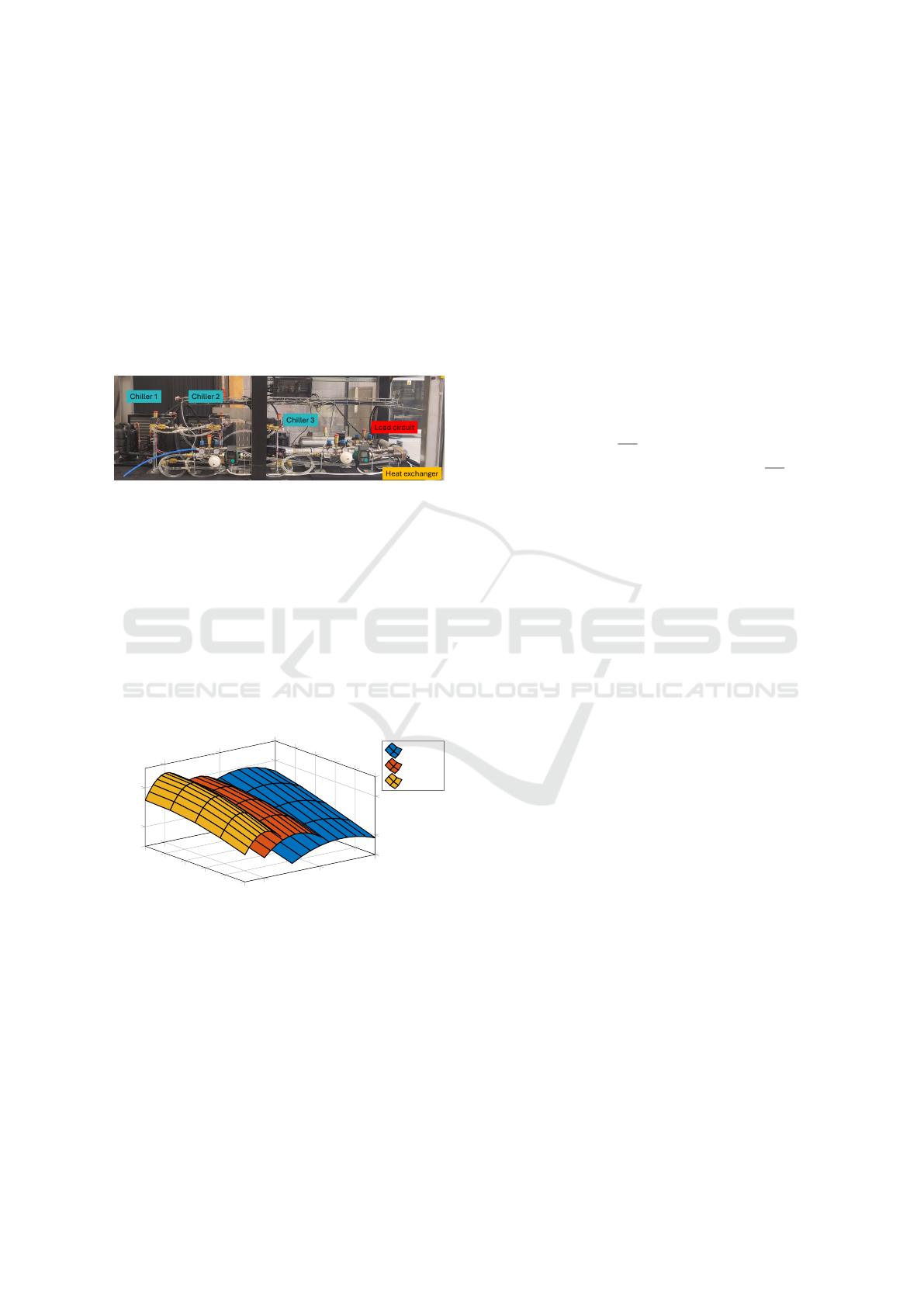
3 COOLING NETWORK SETUP
The particular use-case we consider in this paper is a
scaled down version of an industrial cooling network.
We will study a simulation model of the experimental
setup shown in Figure 1. To allow for easier testing
on this model and this setup, we consider a scaled
Reinforcement Learning for Model-Free Control of a Cooling Network with Uncertain Future Demands
61
cooling task: we perform a shorter cycle (5 or 10 min-
utes cycles vs. typical 24 or 48 hours cycles), and
we have scaled the losses so that typical trade-offs
as found in industrial cooling scenarios are present.
These rescaled losses ensure the controller faces the
typical industrial trade-off when deciding when and
how much to use the chillers: alternating between
on/off too often causes start/stop losses and wears out
the units, while keeping them on for longer durations
and building up a thermal buffer by cooling too much
will result in extra heat transfer losses to the environ-
ment.
Figure 1: Experimental setup with 3 chillers and a load.
The considered system consists of:
•
A cooling circuit with three chillers, which con-
vert input electrical power
P
input
in to cool-
ing power
P
cool
, with a given coefficient of
performance (CoP), such that
P
cool
(
T, P
input
) =
CoP
(
T, P
input
)
P
input
, see Figure 2. The chillers
have varying (electrical) power ranges: 300W-
600W, 200W-400W, 130W-260W. When running,
they cannot operate between 0W and the respective
lower bounds, but alternatively, the chillers can be
off (0W).
200
400
600
20
22
24
26
28
30
2
3
P
input
[W]
Temperature [
◦
C]
CoP
Chiller 1
Chiller 2
Chiller 3
Figure 2: Operating region and CoP of the chillers.
•
The load circuit, containing 1.5L water. The rel-
atively small inertia of this load circuit is chosen
so testing can be sped up (control results are seen
quicker), but makes the system more challenging
to control. The load circuit is heated by a pro-
grammable heating element according to a given
power profile
P
load
detailed later. This circuit aims
to mimic industrial cooling demands.
•
A heat exchanger and a set of pumps. On the cold
side a pump is there to ensure cold liquid flows
from the chillers to the heat exchanger, and slightly
warmer liquid flows back to them. On the hot side
another pump is present to ensure flow from the
load circuit to the heat exchanger and back.
The system is modelled in a simplified form using a
single temperature
T
, assumed equal across the system.
We thus do not have separate states for cold and hot
sides, but simply assume the chillers as well as the
heater directly impact
T
. We also use
T
as the input
for our CoP’s. Given this, the dynamics of
T
can be
written as an ordinary differential equation (ODE):
˙
T = C(−P
cool, total
+ P
load
− P
loss
(T )), (1)
where
P
cool, total
=
∑
i=3
i=1
P
i
cool
(
T, P
i
input
) with
i
the re-
spective chiller.
C
=
1
mc
p
denotes the capacity, with
m
= 1
.
5 kg the mass of water and
c
p
= 4186
J
kgK
the
specific heat capacity. Second,
P
load
denotes the heat
injected on the load side. Last, the power loss in the
system is modelled using a lookup table dependent
on
T
, with more power lost to the environment as
T
becomes lower. As mentioned, to compensate for the
small inertia and the short duration of our tests, we
have upscaled the losses to correspond to losses as
would be faced during typical industrial operation.
The discretized version of Eq. 1 is given by:
T (k + 1) = T (k)+
T
s
(C(−P
cool, total
(k) + P
load
(k) + P
loss
(T (k)))),
(2)
where
T
s
denotes the sampling time and
k
the respec-
tive time sample.
3.1 Control and Sampling
The system is controlled using three signals,
P
input
for
each of the 3 chillers. A sampling time of 3 seconds is
used, and we simulate tasks with a total duration of 10
minutes, yielding
N
= 200 control intervals. a scaled
version of an industrial setting, with smaller inertias
and timescales, and upscaled losses to compensate.
Real cooling cases would likely need to be evaluated
on 24h or 48h cycles.
3.2 Control Goal
The goal of the controller is to minimize the cost, while
ensuring a constraint on the temperature is met.
The cost function of the system
J
over the total
time interval k ∈ [1, N] is set to:
J = T
s
k=N
∑
k=1
P
input, total
(k) +
i=3
∑
i=1
c
i
w
i
, (3)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
62

where
P
input, total
=
∑
i=3
i=1
P
i
input
with
P
i
input
the input
power of each respective chiller, each with index
i
. The
first term describes the total energy required to operate
the chillers, i.e., the sum of the 3 chiller input powers
over time. The goal of the second term is to prevent
unnecessary compressor start-up and switching. To
do so, it increases each time a chiller turns on in the
given interval,
w
i
, with a given scaling per chiller,
c
i
,
set equivalent to operating each chiller at the highest
input power for 4 samples. This corresponds to the
power consumption due to startup losses, and has as
an additional benefit that it penalizes on/off switching
and therefore reduces wear of the chiller’s compressor.
Last, the temperature constraint can be written as:
T ≤ T
constraint
, (4)
where
T
constraint
= 25
◦
C is the maximum allowable
temperature, and the cooling has to ensure the temper-
ature remains equal to or below it despite the heating
load applied.
3.3 External Heating Profiles
As mentioned previously, the load circuit is heated by
an external heating profile
P
load
, 10 minutes long, and
consisting of 200 samples. In this paper, we consider
130 different profiles, which are based on a public li-
brary for unit commitment, see (IEEE, 2024). 15 of
the profiles are shown in Figure 3: it can be seen that
repetitive trends occur, but that still significant varia-
tions between the profiles are present. In the remainder
of this paper, the first 100 profiles are selected as the
training set, and the last 30 profiles as the test set.
Figure 3: 15 of the 130 heating profiles.
4 REINFORCEMENT LEARNING
ENVIRONMENT
We now define the Markov Decision Process to express
the cooling case as an RL problem, by defining its
action space, observation space and reward function.
4.1 Initial State Distribution
In our setup, episodes have a fixed length of 200 time-
steps, equal to the total task duration. When an episode
terminates, the simulation is reset (the water tempera-
ture in the tank is reset to 25
◦
C, and the 3 chillers are
turned off), and a new simulation can be started.
4.2 Action Space
For the cooling case there are both discrete (on/off)
and continuous actions (if on, at what power level).
To make it easier for the RL, we transform this into
a problem with only continuous actions. Since it is
considered best practice (Raffin et al., 2021) to have
the action and state spaces centered around 0, we chose
a single value to control each chiller, ranging from -1
to 1, which we map to the chiller controls:
• Values below -0.5 are mapped to off.
•
Values between -0.5 and 0 are mapped to on, but
at minimum power input.
•
Positive values are mapped to on, with the range
[0
,
1] corresponding to [
P
lb
, P
ub
], with
P
lb
and
P
ub
the minimum and maximum chiller power inputs.
This allows the agent to control the on/off status
of the chillers, in addition to their power consumption
setpoints, with a single real value.
4.3 Observation Space
The observation space consists of several values that
measure past tank temperatures and power consump-
tion setpoints. For every time-step, 4 values are logged:
the change of temperature (
T
(
k
)
−T
(
k −
1)) of the wa-
ter in the tank during the previous time-step, and the
power input setpoints of the 3 chillers. When produc-
ing observations, the environment looks
N
T
time-steps
in the past to produce
N
T
real values corresponding
to changes in water temperature at these past
N
T
time-
steps. The environment also looks
N
P
time-steps in the
past to produce 3
N
P
real values corresponding to set-
points of the chillers during these past
N
P
time-steps.
N
T
and
N
P
can be distinct, and in our experiment, we
use
N
T
= 10 past temperatures and
N
P
= 6 past set-
points. A final observation is given to the agent, a
running average (rate of 0.1) of the water temperature.
By observing past changes of water temperatures
and chiller setpoints, the agent is able to learn:
•
The past demand and losses, by comparing the
changes of water temperature with the setpoints.
•
The efficiency of the chillers, and how they interact
with the system (the agent has no model and has
to discover the effect of its actions).
Reinforcement Learning for Model-Free Control of a Cooling Network with Uncertain Future Demands
63

•
All this combined allows the agent to build an
internal estimate of what the future demand may
be, given that the 100 demand profiles are distinct
but share some structure.
This information is still not enough for optimal con-
trol, as it does not contain information about the future
demand, but observing a history of past sensor read-
ings has been shown to be one of the best approaches
to learn in Partially Observable MDPs (Bakker, 2001),
and is straightforward to implement.
4.4 Reward Function
In this section, the reward function it explained. The
reward function is the negation of the change in cost
that occurs after a given time-step k ∈ [1, N]. By sum-
ming over all time steps, the total reward (of a given
episode) is computed.
The reward function is build up similarly to the cost
(and temperature constraint) introduced previously in
Section 3.2. Hence, the considered reward function
(for a given time-step) consists of three components:
1.
Minimizing Energy Consumption. The first part
of the reward function is equal to (minus) the to-
tal energy consumed during the considered time-
step
k
, i.e.,
T
s
P
input, total
(
k
), with
P
input, total
(
k
) the
power consumed by all the chillers at sample k.
2.
Penalizing Turning-On of Chillers. The second
part of the reward function is a (negative) turn on
penalty when a chiller turns on, like in Section 3.2.
3.
Constraint Satisfaction. If the constraint on the
water temperature (in this case, set to 25
◦
C) is
violated, a reward of -2 is given to the agent for
this time-step. A backup policy then turns all the
chillers ON to maximum power, thereby also pro-
viding several turn-on penalties. The episode oth-
erwise continues, and the agent learns over time to
meet the constraint to avoid the -2 rewards.
Over an episode (of
N
samples), after the agent
has learned to always meet the constraint, the sum of
these rewards perfectly corresponds to the actual cost
of running the episode, given by Eq. 3.
4.5 Training Procedure
The RL agent is trained using the Proximal Policy
Optimization (Schulman et al., 2017), as implemented
in Stable-Baselines 3 (Raffin et al., 2021). Hyper-
parameters are given in Section 6. The agent is allowed
to learn for 40 million time-steps (about 5 hours using
8 AMD Zen2 cores running at 4.5 Ghz).
Every 128000 time-steps, the current policy
learned by the agent is saved in a checkpoint file (of
about 1.7 MB). After training, all these policies are
run on demand profile 1 with exploration disabled, and
the run with the smallest cost is selected as the RL
policy. This evaluation takes about 11 minutes on a
single AMD Zen2 core, and finds a policy that:
•
Is about 2% better than the last policy produced by
the agent (cost of 446 instead of 455);
•
Was produced after about 20 million time-steps,
so significantly before the end of the training (40
million time-steps).
These two points combined indicate that it is both
beneficial and cheap to evaluate a collection of learned
RL policies before picking one to use, because agents
do not monotonically become better as they learn, but
instead oscillate a bit around the optimal policy.
5 BENCHMARK CONTROLLERS
5.1 Model-Predictive Controller
As a first benchmark, we use a model-predictive con-
troller (MPC). It optimizes the state trajectories and
controls over a given horizon
N
mpc
. At every time step
k ∈
[1
, N
], an optimization problem is solved. After
solving, the first sample of the computed input se-
quence is then applied to the system, and we again
solve the optimization problem for the next time sam-
ple. This is repeated for the entire horizon with length
N
. The resulting discrete-time optimization problem
is set up as follows:
minimize
T (·),P
input
(·)
T
s
k=1
∑
k=N
mpc
P
input, total
(k) + (5a)
γ
i=1
∑
i=3
(P
i
input, previous
− P
i
input
(1))
2
,
s. t. (2) ∀ k ∈ [1, N
mpc
], (5b)
T (k) ≤ 25 ∀ k ∈ [1, N
mpc
], (5c)
P
lb
≤ P
input
(k) ≤ P
ub
∀ k ∈ [1, N
mpc
], (5d)
T (1) = T
init
. (5e)
Eq. 5a implements the cost function. It is set to mini-
mize (1) the sum of all input power, that is, the total
energy consumption over the entire horizon, along
with (2) a regularization term which penalizes the dif-
ference of the first sample of the current horizon and
the last input applied to the system, thereby penaliz-
ing switching the control input. The system dynamics
are implemented using Eq. 2, using multiple shoot-
ing. Eq. 5c implements the constraint on the allowed
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
64
temperature, and Eq. 5e ensures each MPC iteration
starts from the temperature last measured on the sys-
tem. Finally, for each chiller, constraints are set on the
allowed input power in Eq. 5d.
As mentioned previously, each chiller can be ON
(and if so, in a specific input power range), or OFF.
This would cause the MPC to require a mixed-integer
optimization problem, which are harder to solve. In
this paper, we approximate the true mixed-integer prob-
lem by decomposing it using an outer loop (with only
discrete variables) and an inner loop (with only contin-
uous values). Solving the full optimization for a single
time instance can be done using the following steps:
•
Step 1: Select one of the combinatorial options for
ON/OFF status of the 3 chillers e.g., [ON, OFF,
OFF]
•
Step 2: For the option selected in step 1, solve the
inner loop MPC problem that minimizes the total
energy.
•
Step 3: Go back to step 1 and select another com-
binatorial option of chiller ON/OFF statuses, until
all options are computed
•
Step 4: Select the option with the lowest total
energy as the solution to the nested MPC problem
In other words, the outer loop selects which chillers
are ON or OFF (in the entire time interval). Then,
the inner loop solves the above optimization problem
(with input powers kept within to their input ranges for
chillers that are ON, or kept at zero when OFF). The
outer loop iterates over all possible combinations (in
this case 8), and computes the resulting cost according
to Eq. 3. The solution with the lowest cost (that
meets the temperature constraints) is then selected
and applied to the system. Note there is no penalty
included for switching between ON/OFF states in the
inner loop, since the MPC problem solved in the inner
loop assumes the same set of chillers remains ON
during the entire horizon. In the outer loop we do
penalize sets that require a change in ON/OFF states
when compared to the solution at the previous time
sample.
The MPC problem is implemented using
CasADi (Andersson et al., 2019) and is solved using
IPOPT (Biegler and Zavala, 2009).
5.2 Rule-Based Controller
As a second benchmark, we use a rule-based controller
or RBC. It is implemented in the following way:
•
A feedback input
P
desired
=
K
p
(
T
set point
− T
) is
computed using a proportional controller with gain
K
p
. The setpoint is given by
T
set point
, which can be
set equal to the constraint on the load temperature
(25
◦
C) minus an offset. This offset can be tuned
to ensure that the controller meets the temperature
constraint for varying heat load profiles.
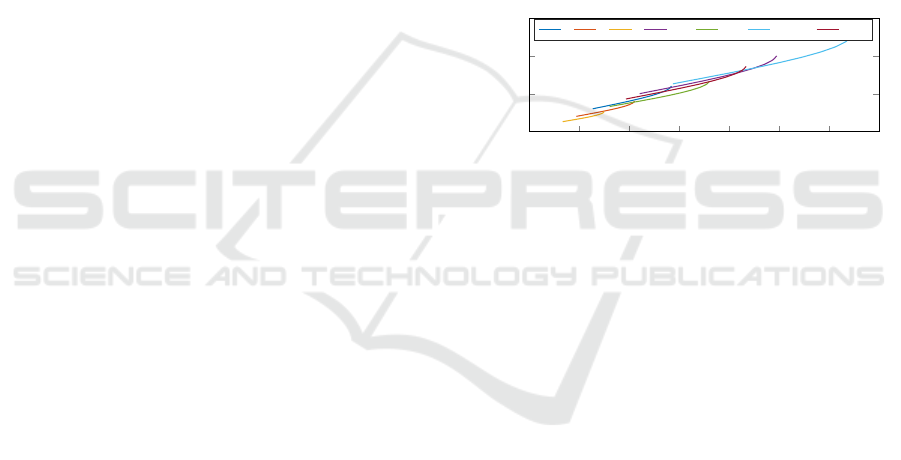
•
From
P
desired
, we can select which chillers to turn
ON. This is done by first inspecting the relative
efficiencies of combinations of chillers, as shown
in Fig. 4. Then, for each
P
desired
, we can select
the most efficient combination. In order to prevent
switching of sets too often, we introduce a simple
deadband (i.e., we only switch between combina-
tions if the difference has exceeded this deadband).
•
After the set of chillers to be used is chosen in
the previous step, we select the input powers of
each chiller. The goal is to match
P
desired
, while
minimizing the total required input power by the
chillers. This is done via a simple heuristic.
0 500 1,000 1,500 2,000 2,500 3,000 3,500
0
500
1,000
1,500
P
cool
[W]
P
input
[W]
1 2 3 1&2 2&3 1&2&3 1&3
Figure 4: Relative efficiencies of the sets of chillers.
6 RESULTS
6.1 Nominal Case
In this section, we have run each of the controllers for
the nominal case: without any perturbations. For each
of the controllers, the settings are as follows:
•
The RL algorithm is based on the Proximal Policy
Optimization algorithm (Schulman et al., 2017),
as implemented in the Stable Baselines 3 (Raffin
et al., 2021). The hyper-parameters of that agent
are the default ones from Stable Baselines 3 (as of
January 2023), with the exception of: 128 paral-
lel environments (n_envs), a batch size of 200, and
both the actor and value networks are feed-forward
neural networks with 2 hidden layers of 256 neu-
rons. Given the limited number of neurons the risk
of overfitting was deemed low, but more sparse
neural networks could be explored in future work
to perhaps improve results in regions outside of
training. The RL agent was allowed to learn in our
simulated setup for 40 million time-steps. These
hyper-parameters have been obtained through in-
formed manual tuning, and our results haven been
found to be robust to changes in hyper-parameters.
Reinforcement Learning for Model-Free Control of a Cooling Network with Uncertain Future Demands
65
•
The MPC has a horizon of
N
mpc
= 10 samples, the
other parameters are set as outlined earlier.
•
For the RBC, we set the temperature setpoint to
23.1
◦
C and K
p
= 2500.
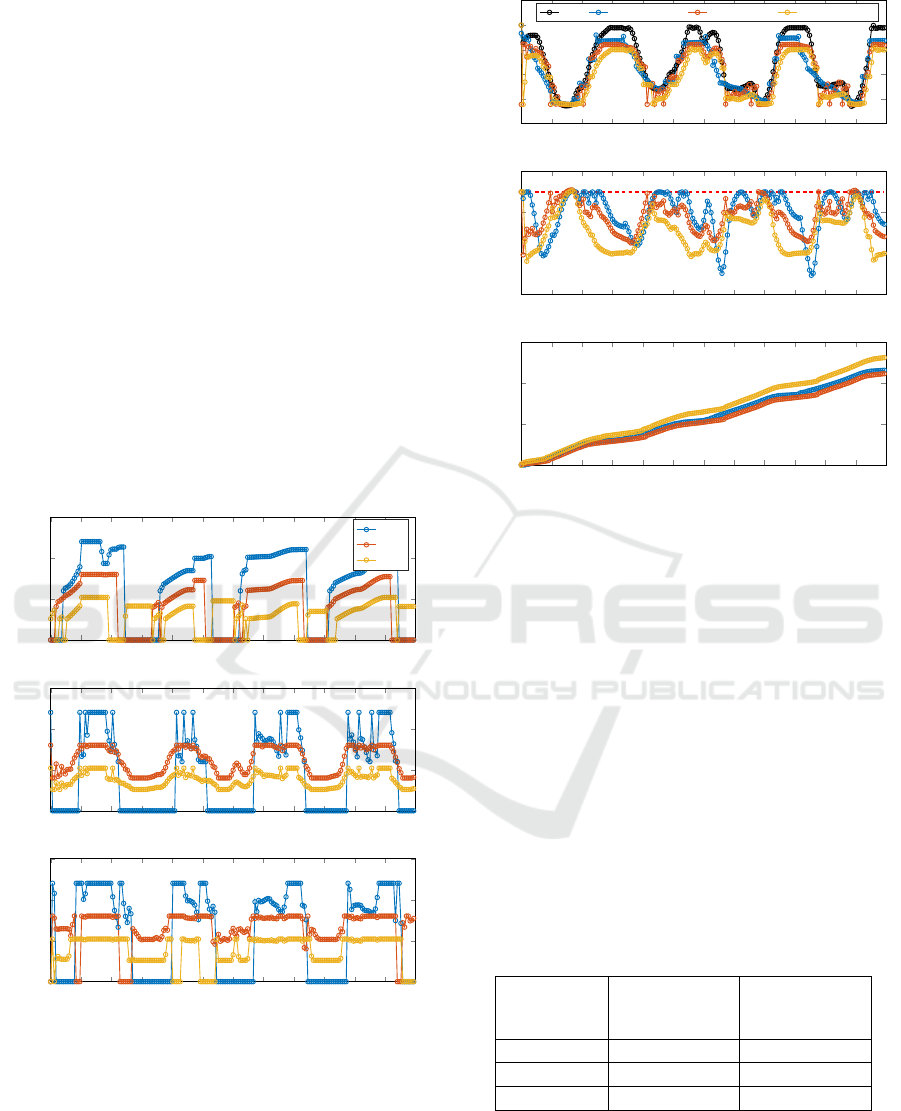
We show the outcome of each of the three con-
trollers for a specific example scenario in Figure 5
(the control inputs) and Figure 6 (cooling power: de-
mand and delivered, temperature, cost). As can be
seen from the plots, all three make choices that cause
the chillers to turn ON and OFF, and choose the corre-
sponding power input, but the solutions differ between
the controllers. As can also be seen, the provided
cooling for all 3 controllers matches the load profile
somewhat, though not perfectly. This can also be seen
in the achieved temperature, which goes up or down
when the demand isn’t matched exactly (which is al-
lowed as long as the temperature remains below the
upper bound, though there will be more losses if the
temperature is lower). Lastly, it can be seen that the
accumulated cost of the three controllers is similar for
MPC and RL, but significantly higher for the RBC.
0 50 100 150 200 250 300 350 400 450 500 550 600
−4,000
−3,000
−2,000
−1,000
0
1,000
Time [s]
Power [W]
P
load
P
cool, total
(MPC) P
cool, total
(RL) P
cool, total
(RBC)
0 50 100 150 200 250 300 350 400 450 500 550 600
22.5
23.5
24.5
25.5
Time [s]
Temperature [deg C]
0 50 100 150 200 250 300 350 400 450 500 550 600
0
200
400
600
Time [s]
Cost function J
0 50 100 150 200 250 300 350 400 450 500 550 600
0
250
500
750
Time [s]
P
input
[W]
MPC
P
1
input
P
2
input
P
3
input
0 50 100 150 200 250 300 350 400 450 500 550 600
0
250
500
750
Time [s]
P
input
[W]
RL
0 50 100 150 200 250 300 350 400 450 500 550 600
0
250
500
750
Time [s]
P
input
[W]
RBC
Figure 5: Outcome with each of the 3 controllers on a nomi-
nal example scenario. The plots show the electrical powers
for all 3 chillers, first for MPC, then for RL, and finally for
RBC.
We have also averaged the results, over both train-
ing and test set, as shown in Table 1. Similar obser-
vations can be made regarding MPC and RL signifi-
cantly beating the RBC. The RL even appears to have
a lower cost than MPC, but an exact comparison is
0 50 100 150 200 250 300 350 400 450 500 550 600
−4,000
−3,000
−2,000
−1,000
0
1,000
Time [s]
Power [W]
P
load
P
cool, total
(MPC) P
cool, total
(RL) P
cool, total
(RBC)
0 50 100 150 200 250 300 350 400 450 500 550 600
22.5
23.5
24.5
25.5
Time [s]
Temperature [deg C]
0 50 100 150 200 250 300 350 400 450 500 550 600
0
200
400
600
Time [s]
Cost function J
0 50 100 150 200 250 300 350 400 450 500 550 600
0
250
500
750
Time [s]
P
input
[W]
MPC
P
1
input
P
2
input
P
3
input
0 50 100 150 200 250 300 350 400 450 500 550 600
0
250
500
750
Time [s]
P
input
[W]
RL
0 50 100 150 200 250 300 350 400 450 500 550 600
0
250
500
750
Time [s]
P
input
[W]
RBC
Figure 6: Outcome with each of the 3 controllers on a nomi-
nal example scenario. The plots show for all 3 controllers
the resulting cooling power versus the demand, the resulting
temperature (including the setpoint of 25
◦
C (red dashed
line), and the corresponding accumulated cost.
hard since the RL did slightly violate the upper bound
on the temperature (by 0.05
◦
C), which the MPC did
not. Based on rough analysis, this is not expected to
yield more than 1% of difference in energy cost, after
the RL would be retrained with a small temperature
constraints margin. So we conclude the RL achieves
nearly the same performance as the MPC does.
The results shown for the RL are those achieved af-
ter it has learned how to control the chillers effectively.
Figure 7 shows the evolution of the performance from
the initial stages of the learning, until the final con-
troller whose results were shown in the graph and the
table.
Table 1: Performance for the nominal case.
Algorithm
Average cost
(train set)
Average cost
(test set)
MPC 454 J 450 J
RL 450 J 448 J
RBC 517 J 512 J
6.2 MPC with Shorter Predictions
In this section, we analyse what happens when the
MPC is given shorter prediction windows, in this case
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
66
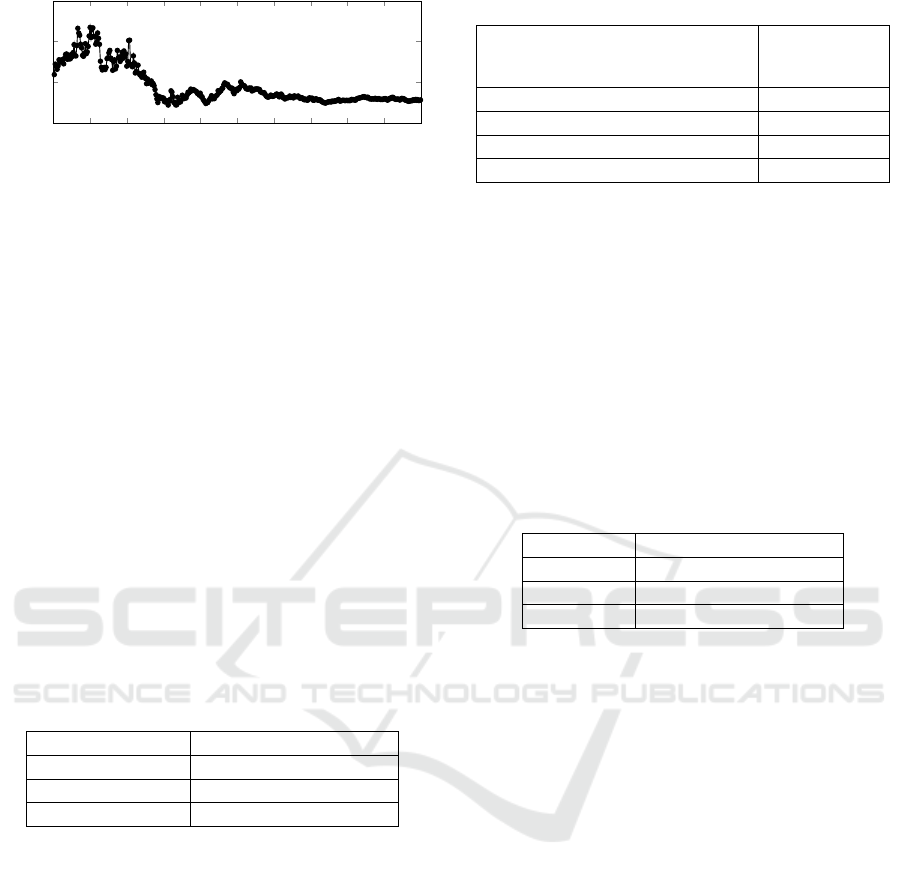
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5 5
·10
7
400
500
600
700
Time steps
Average cost
Figure 7: Improvement of the RL policy during the training
process (50M time samples, 5:30 hours in simulation). The
agent already learns a good policy at around 20M samples,
and then further stabilizes.
4 samples (i.e., 12s, so short in comparison with the
period time of load variations or the system time con-
stant). The RBC and the RL do not use predictions, so
achieve the same results in the previous section.
The results are shown in Table 2. Therein we can
see that the MPC with shorter predictions has a per-
formance that falls below that of the RL. We did not
include an MPC with even shorter predictions, or none
at all, since these often violate the temperature con-
straints, and therefore would require more extensive
tuning.
This shows that the MPC needs to have good pre-
dictions, over a sufficiently long window, to be able to
control optimally. And since the RL performs equiv-
alently to the MPC controller with good predictions,
it furter shows that even though the RL does not use
predictions explicitly, it has learned how to implicitly
anticipate to the types of profiles in the training set.
Table 2: Impact of shorter predictions.
Algorithm Average cost (test set)
MPC (4 samples) 475 J
RL 448 J
RBC 512 J
6.3 MPC with Imperfect Predictions
In this section, the MPC is provided with predictions
that overestimate or underestimate the demand by 10%,
in an attempt to study real-world behavior when pre-
dictions of future demand are imperfect. Again, for
the RL and the RBC the results are the same. It can
be seen in Table 3 that the MPC is sensitive to these
predictions, and that in case of such mismatch the RL
performs better than the MPC.
6.4 RL with Demands Beyond Training
Finally, we consider the scenario where the demands
encountered are different to those considered during
the training. This to study the effect on the RL: not of
Table 3: Impact of imperfect predictions.
Algorithm
Average cost
(test set)
MPC (demand over-estimated) 490 J
MPC (demand under-estimated) 519 J
RL 448 J
RBC 512 J
having imperfect predictions since the RL does not use
them, but of having a training set that is not complete,
or not fully representative of real world behavior.
Here we have scaled down the demands by a factor
0.8, while the controllers are kept the same as in the
previous case. This has an impact on the RL, since the
patterns that are implicitly being exploited no longer
correspond to those faced. The MPC on the other hand
is given this new demand profile, and can therefore ad-
just very effectively. As a result, the RL now performs
noticeably less performant than the MPC controller, as
seen in Table 4.
Table 4: Impact with scaled down demands.
Algorithm Average cost (test set)
MPC 380 J
RL 391 J
RBC 463 J
6.5 Training and Runtime
While the RL has achieved good results, it did require
a learning process to do so, running 200000 episodes
(40M time samples) of the simulation model. This
took around 5 hours using 8 AMD Zen2 cores running
at 4.5 Ghz. This is still significantly shorter than the
engineering time needed to work out the approaches,
set up the environments and debug the codes, for both
MPC and RL. Training time is thus not yet the real bot-
tleneck. In future cases, when more variations are con-
sidered, or model-plant mismatch, this number might
increase further however, so care will need to be taken
to keep this manageable.
We also evaluated the runtime needed to evaluate or
execute the controllers. As shown in Table 5, the MPC
required on average a calculation time of 0.50 seconds,
and the RL 0.04 seconds. This is a significant advan-
tage of using the RL over the MPC controller. Note
that there are various ways to reduce the computation
time of an MPC e.g., reduce its control horizon, use a
move-blocking implementation, increase its sampling
rate, change low-level optimizer types and settings, but
these are not the focus of this work.
Reinforcement Learning for Model-Free Control of a Cooling Network with Uncertain Future Demands
67

Table 5: Calculation times.
MPC 0.5 s
RL 0.04 s
7 DISCUSSION
From the previous, we can see that in nominal con-
ditions RL can match the performance of a nearly-
optimal MPC controller. However, RL does so without
using predictions of upcoming demands (nor models),
which the MPC does use. Furthermore, since the RL
does better than an MPC with a reduced prediction
horizons, we can see that the RL has implicitly learned
the typical demand patterns, and achieves MPC-like
performance without needing predictions of the fu-
ture demands explicitly. This fits with the observation
that when we use demands outside of the training set,
the performance of the RL does degrade, as then the
implicitly learned patterns are no longer correct.
For industrial usage there is then a trade-off to be
made. Beyond savings in runtime calculations, using
RL would have the benefit of not needing good predic-
tions of future demands, as even with small prediction
imperfections the MPC performance drops below the
RL. On the other hand, this only holds when the train-
ing data for the RL is sufficiently rich to ensure that
the usage patterns faced during operation fall within
the implicitly learned behavior. In future work we will
study this further. We will study if we can train an RL
for a more diverse set of usage patterns (e.g., includ-
ing rescaled versions) and initial system states (e.g.,
initial tank water temperatures) and how much the per-
formance degrades when the increased variety makes
it harder to find patterns to exploit. Techniques such
as domain randomization (Tobin et al., 2017) might
prove helpful in this case. Furthermore, investigations
into possible overfitting due to fully-connected neural
networks should be addressed, and possibly resolved
with more sparse networks. Another interesting option
for study is combining both approaches: let the RL
learn patterns implicitly, but also provide it explicit
predictions, though possibly indirect or imperfect.
It also has to be noted that while we focused on
the impact of imperfect predictions of future demands
in this paper, a practical challenge that will be faced
in reality is that the models describing the system dy-
namics will also be imperfect. This will impact the
MPC which uses them explicitly, but it will also im-
pact the RL which uses the models to run simulations
to train on. Studying the impact of imperfect models is
a very interesting challenge, which we will also tackle
in future work. We plan to study training RL on sets
of variant models, increasing its robustness, and/or ap-
proaches wherein we allow a limited fine-tuning of the
RL once deployment to the real plant occurs. Next to
that, combinations of RL methods with other methods
like MPC or RBC controllers will also be considered.
Beyond using RL or combining it with other meth-
ods, an alternative (yet CPU intensive) solution is to
improve the MPC to better handle imperfect predic-
tions and models, using robust, stochastic or multi-
stage formulations. We did not do so or tune the MPC
extensively in this paper, since our goal was to show
the MPC relies on predictions, whereas the RL did not.
8 CONCLUSION
This paper compares several controllers on a simu-
lated cooling system with 3 chillers. The proposed
RL achieves a performance nearly equal to that of
an MPC, but without explicit demand predictions nor
model, and at a reduced computational cost. It does
lose some performance when demands outside the
training set are used, but the MPC loses performance
when the predicted demands lose accuracy. Future
work will therefore focus on making the RL robust
to more diverse usage patterns, by e.g. making them
rely on both implicitly learned patterns and explicit
predictions. We will further study how to train RL
on imperfect models, and how to ensure an efficient
transfer is possible when there is mismatch between
simulation environment and reality.
This paper implemented the proposed approach to
a single use-case with a simulation of a scaled-down
industrial usage pattern. Nevertheless, losses have
been rescaled in order to make the outcomes repre-
sentative for a wider range of problems: those where
complex systems (multiple units, non-linear behavior,
mixed integer controls) need to be controlled, while
balancing short and long term cost drivers (inability
to switch active units all the time requiring to look
further ahead and anticipate, while considering the im-
pact of losses as a function of the states encountered).
We expect similar outcomes and trade-offs to hold for
many industrial cases with similar properties, like unit
commitment problems, industrial cooling, water treat-
ment, pumping plants, heating networks, compressed
air generation, etc. It is still an open question which of
the methods will be more realistic when the number of
controllable degrees of freedom increases, e.g. when
a pumping plant with 20 pumps is faced rather than
one with 3. The challenge will be to let the RL find
solutions in an acceptable period of training time. On
the other hand, for the MPC mostly the runtime will
become a bottleneck, as the MPC with our current
formulation scales quadratically in the inner loop (in
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
68

ideal case, in practice worse due to non-linearities),
but combinatorially in the outer loop. However, sev-
eral other formulations exist in literature, including
heuristic methods, that keep it tractable up to 20+ con-
trollable units.
BROADER IMPACT STATEMENT
Our contributions make more industrial machines con-
trollable in an autonomous way. We mainly envi-
sion positive impacts on society, such as reduced en-
ergy consumption for the same manufacturing quality,
higher manufacturing quality (less waste) and a gen-
eral improved economy. The machines that would
benefit from our contribution are usually not directly
controlled by people, so we don’t expect jobs to be
lost to automation with our contribution. We however
acknowledge that any improvement in automation also
improves it for sensitive use, such as military equip-
ment production.
ACKNOWLEDGMENTS
This research is done in the framework
of the Flanders AI Research Program
(https://www.flandersairesearch.be/en) that is fi-
nanced by EWI (Economie Wetenschap & Innovatie),
and Flanders Make (https://www.flandersmake.be/en),
the strategic research Centre for the Manufacturing
Industry, who owns the Demand Driven Use Case.
The authors would like to thank everybody who
contributed with any inputs to make this publication.
REFERENCES
Andersson, J. A., Gillis, J., Horn, G., Rawlings, J. B., and
Diehl, M. (2019). Casadi: a software framework for
nonlinear optimization and optimal control. Mathemat-
ical Programming Computation, 11(1):1–36.
Asadi, K., Parikh, N., Parr, R. E., Konidaris, G. D., and
Littman, M. L. (2021). Deep radial-basis value func-
tions for continuous control. In Proceedings of the
AAAI Conference on Artificial Intelligence, volume 35,
pages 6696–6704.
Bakker, B. (2001). Reinforcement learning with long short-
term memory. Advances in neural information process-
ing systems, 14.
Biegler, L. T. and Zavala, V. M. (2009). Large-scale nonlin-
ear programming using ipopt: An integrating frame-
work for enterprise-wide dynamic optimization. Com-
puters & Chemical Engineering, 33(3):575–582.
Borase, R. P., Maghade, D., Sondkar, S., and Pawar, S.
(2021). A review of pid control, tuning methods and
applications. International Journal of Dynamics and
Control, 9:818–827.
Camacho, E. F. and Alba, C. B. (2013). Model predictive
control. Springer science & business media.
Chen, R., Lan, F., and Wang, J. (2024). Intelligent pressure
switching control method for air compressor group
control based on multi-agent reinforcement learning.
Journal of Intelligent & Fuzzy Systems, 46(1):2109–
2122.
De Somer, O., Soares, A., Vanthournout, K., Spiessens, F.,
Kuijpers, T., and Vossen, K. (2017). Using reinforce-
ment learning for demand response of domestic hot
water buffers: A real-life demonstration. In 2017 IEEE
PES Innovative Smart Grid Technologies Conference
Europe (ISGT-Europe), pages 1–7. IEEE.
Frank, R. J., Davey, N., and Hunt, S. P. (2001). Time series
prediction and neural networks. Journal of intelligent
and robotic systems, 31:91–103.
Fujimoto, S., Hoof, H., and Meger, D. (2018). Addressing
function approximation error in actor-critic methods.
In International conference on machine learning, pages
1587–1596. PMLR.
Glover, K. (2021). H-infinity control. In Encyclopedia of
systems and control, pages 896–902. Springer.
Haarnoja, T., Zhou, A., Hartikainen, K., Tucker, G., Ha, S.,
Tan, J., Kumar, V., Zhu, H., Gupta, A., Abbeel, P., et al.
(2018). Soft actor-critic algorithms and applications.
arXiv preprint arXiv:1812.05905.
Hessel, M., Modayil, J., Van Hasselt, H., Schaul, T., Ostro-
vski, G., Dabney, W., Horgan, D., Piot, B., Azar, M.,
and Silver, D. (2018). Rainbow: Combining improve-
ments in deep reinforcement learning. In Proceedings
of the AAAI conference on artificial intelligence, vol-
ume 32.
IEEE (2024). Ieee pes power grid benchmarks.
Lewis, F. L., Vrabie, D., and Syrmos, V. L. (2012). Optimal
control. John Wiley & Sons.
López-Ibáñez, M., Prasad, T. D., and Paechter, B. (2008).
Ant colony optimization for optimal control of pumps
in water distribution networks. Journal of water re-
sources planning and management, 134(4):337–346.
Lourenço, H. R., Martin, O. C., and Stützle, T. (2019). Iter-
ated local search: Framework and applications. Hand-
book of metaheuristics, pages 129–168.
Luo, J., Paduraru, C., Voicu, O., Chervonyi, Y., Munns,
S., Li, J., Qian, C., Dutta, P., Davis, J. Q., Wu, N.,
et al. (2022). Controlling commercial cooling sys-
tems using reinforcement learning. arXiv preprint
arXiv:2211.07357.
Mehra, R. and Davis, R. (1972). A generalized gradient
method for optimal control problems with inequality
constraints and singular arcs. IEEE Transactions on
Automatic Control, 17(1):69–79.
Meinhold, R. J. and Singpurwalla, N. D. (1983). Under-
standing the kalman filter. The American Statistician,
37(2):123–127.
Michalewicz, Z., Janikow, C. Z., and Krawczyk, J. B. (1992).
A modified genetic algorithm for optimal control prob-
Reinforcement Learning for Model-Free Control of a Cooling Network with Uncertain Future Demands
69

lems. Computers & Mathematics with Applications,
23(12):83–94.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Veness,
J., Bellemare, M. G., Graves, A., Riedmiller, M., Fidje-
land, A. K., Ostrovski, G., et al. (2015). Human-level
control through deep reinforcement learning. nature,
518(7540):529–533.
Monahan, G. E. (1982). State of the art—a survey of partially
observable markov decision processes: theory, models,
and algorithms. Management science, 28(1):1–16.
Raffin, A., Hill, A., Gleave, A., Kanervisto, A., Ernestus, M.,
and Dormann, N. (2021). Stable-baselines3: Reliable
reinforcement learning implementations. The Journal
of Machine Learning Research, 22(1):12348–12355.
Roy, N. and Gordon, G. J. (2002). Exponential family pca
for belief compression in pomdps. Advances in Neural
Information Processing Systems, 15.
Schulman, J., Levine, S., Abbeel, P., Jordan, M., and Moritz,
P. (2015). Trust region policy optimization. In In-
ternational conference on machine learning, pages
1889–1897. PMLR.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization algo-
rithms. arXiv preprint arXiv:1707.06347.
Shang, W., Wang, X., Srinivas, A., Rajeswaran, A., Gao,
Y., Abbeel, P., and Laskin, M. (2021). Reinforcement
learning with latent flow. Advances in Neural Informa-
tion Processing Systems, 34:22171–22183.
Silver, D., Lever, G., Heess, N., Degris, T., Wierstra, D., and
Riedmiller, M. (2014). Deterministic policy gradient
algorithms. In International conference on machine
learning, pages 387–395. Pmlr.
Sutton, R. S., McAllester, D., Singh, S., and Mansour, Y.
(1999). Policy gradient methods for reinforcement
learning with function approximation. Advances in
neural information processing systems, 12.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and
Abbeel, P. (2017). Domain randomization for trans-
ferring deep neural networks from simulation to the
real world. In 2017 IEEE/RSJ international conference
on intelligent robots and systems (IROS), pages 23–30.
IEEE.
Van Hasselt, H. and Wiering, M. A. (2007). Reinforcement
learning in continuous action spaces. In 2007 IEEE
International Symposium on Approximate Dynamic
Programming and Reinforcement Learning, pages 272–
279. IEEE.
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8:279–292.
Williams, R. J. (1992). Simple statistical gradient-following
algorithms for connectionist reinforcement learning.
Reinforcement learning, pages 5–32.
Zhan, X., Xu, H., Zhang, Y., Zhu, X., Yin, H., and Zheng,
Y. (2022). Deepthermal: Combustion optimization
for thermal power generating units using offline re-
inforcement learning. In Proceedings of the AAAI
Conference on Artificial Intelligence, volume 36, pages
4680–4688.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
70
