
FOPID-Based Trajectory Control for an Unmanned Aerial
Robotic Manipulator
Gabriela M. Andaluz
1
a
, Zahid Nazate
1
b
, Paulo Leica
1
c
and Guillermo Palacios-Navarro
2
d
1
Departamento de Automatización y Control Industrial, Escuela Politécnica Nacional, Quito 170525, Ecuador
2
Department of Electronic Engineering and Communications, University of Zaragoza, Teruel 44003, Spain
Keywords: Aerial Manipulators, Fractional-Order PID, FOPID Control, UMA, Trajectory Tracking, UAV-Based
Manipulation.
Abstract: This work presents a Fractional Order PID (FOPID) control strategy for trajectory tracking of an Unmanned
Aerial Manipulator (UAM), proposed as an alternative to the conventional PID controller. Unlike classical
integer-order controllers, the FOPID design enables more flexible tuning of the aerial manipulator’s kinematic
response by introducing five independent tuning parameters. This added flexibility enhances system stability
and improves robustness against abrupt reference changes. The controller parameters are optimized through
Integral of Squared Error (ISE) minimization to ensure efficient performance. Simulation results confirm that
the FOPID controller achieves superior trajectory tracking accuracy compared to the conventional PID.
Specifically, the ISE values obtained with the FOPID reflect reductions of 23.46%, 24.99%, and 15.35% in
the tracking errors along the 𝑥, 𝑦 and 𝑧̃ directions, respectively. These results validate the effectiveness of the
FOPID approach in improving the control performance of unmanned aerial manipulators.
1 INTRODUCTION
Unmanned Aerial Manipulators (UAMs) integrate
the mobility of Unmanned Aerial Vehicles (UAVs)
with the manipulation capabilities of robotic arms,
posing significant control challenges due to their high
nonlinearities, strong couplings, and external
disturbances. Although full dynamic models offer
accuracy (Carvajal et al., 2024), their complexity
restricts real-time implementation. Consequently,
some approaches adopt decoupled dynamics
(Sharma et al., 2025), (Zhang et al., 2021) or treat the
robotic arm as a disturbance (Zheng et al., 2023).
Within this framework, kinematic models offer a
suitable alternative for achieving precise trajectory
tracking at low computational cost, particularly in
low-speed operation scenarios.
Classical integer-order PID controllers have been
extensively applied in robotics due to their simplicity
and ease of implementation (Moya et al., 2016;
Mundheda et al., 2023), but they exhibit significant
a
https://orcid.org/0000-0002-1822-6943
b
https://orcid.org/0009-0009-4826-9475
c
https://orcid.org/0000-0002-5385-1920
d
https://orcid.org/0000-0002-8408-1280
limitations when dealing with external disturbances,
parametric variations, and nonlinearities (Leica et al.,
2017), especially in systems such as UAMs. To
address these shortcomings, various PID extensions
have been proposed, including adaptive schemes
(Ghamari et al., 2022), sliding mode controllers
(Noordin et al., 2022), fuzzy logic-based controllers
(Cao et al., 2022), and sigmoid-based control
structures (Suid & Ahmad, 2022). Nonetheless, all of
these strategies still operate under the constraints of
integer-order dynamics.
Fractional-order control theory generalizes the
classical PID framework by allowing non-integer
orders in the integral and derivative operators, thus
introducing two additional degrees of freedom that
enhance tuning flexibility and the ability to model
real-world systems more accurately (Torvik &
Bagley, 1984). FOPID controllers have demonstrated
superior performance in diverse robotic applications.
For example, in robotic manipulators, FOPID
schemes have been integrated with neural networks
Andaluz, G. M., Nazate, Z., Leica, P. and Palacios-Navarro, G.
FOPID-Based Trajectory Control for an Unmanned Aerial Robotic Manipulator.
DOI: 10.5220/0013706200003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 227-234
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
227
(Mohamed et al., 2023), applied in iterative model-
free control (Zhang et al., 2021), combined with
sliding mode control (Noordin et al., 2022), and tuned
using nature-inspired algorithms such as the Bat
algorithm (A. Faraj & Mohammed Abbood, 2021) or
optimization-based methods (Ghamari et al., 2022).
In the UAVs, FOPID controllers have been improved
tracking precision and robustness against parametric
uncertainties using micro-integral operators
(Delgado-Reyes et al., 2024; Li et al., 2023).
Experimental comparisons with adaptive schemes
further confirm their superiority over classical PID
(Timis et al., 2022). In UAMs, FOPID has been
combined with predictive and sliding mode control
strategies, yielding significant improvements in
disturbance rejection and trajectory tracking (Shao et
al., 2025; Zheng et al., 2023). However, many of
these approaches assume accurate knowledge of the
system dynamics, which remains a practical
limitation due to the inherent complexity of UAM
platforms. Based on the literature, FOPID controllers
have demonstrated significant advantages in
precision and robustness against disturbances and
uncertainties, with successful applications in aerial
and ground robotics (UAVs and UGVs), particularly
in scenarios with wind gusts, payload variations,
friction, and model inaccuracies (Cajo et al., 2019).
Nevertheless, their implementation in UAM systems
remains limited, despite the high potential fractional-
order control offers for this domain.
This work proposes the design and
implementation of a fractional-order PID (FOPID)
controller, formulated using the Caputo fractional
derivative operator, applied to the kinematic model of
a UAM composed of a quadrotor and a 3-DOF robotic
arm. Unlike previous approaches that rely on
complex dynamic models with high real-time
computational costs, the proposed method enables
efficient and precise trajectory tracking control under
abrupt reference changes. The results demonstrate
significant improvements over classical PID
controllers, exhibiting smoother and more robust
responses, thereby positioning the FOPID as an
effective alternative for robust kinematic control of
UAMs. The main contributions of this work are: i) a
novel application of FOPID control in aerial
manipulators, providing a foundation for future
research; and ii) a control strategy that does not
require an exact system model, making it particularly
suitable for platforms like UAMs, whose dynamics
are complex and highly coupled.
The article is organized as follows: Section 1
presents a review of FOPID controllers and the
contributions of this work; Section 2 describes the
modeling of the manipulator, the quadrotor and
UAM; Section 3 details the PID and FOPID
controllers along with the stability analysis; Section 4
presents the obtained results; and Section 5
summarizes the study’s conclusions.
2 SYSTEM MODELING
2.1 Quadrotor Modeling
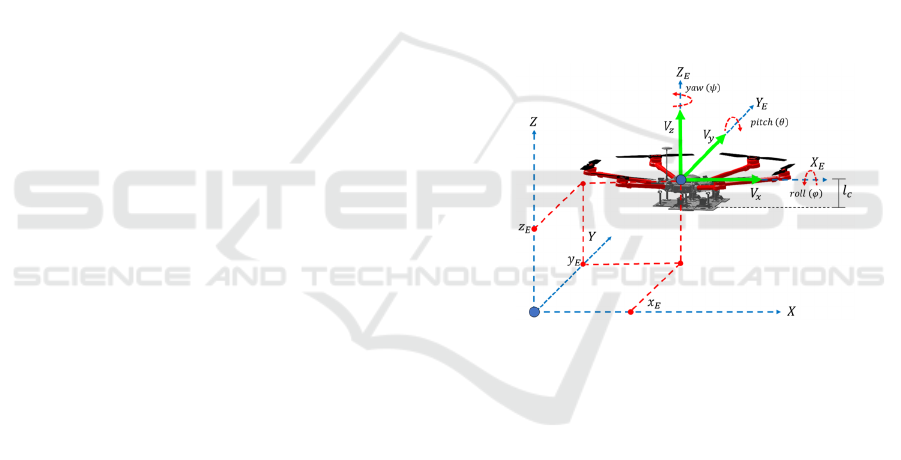
For this work, an aerial manipulator composed of a
quadrotor equipped with a 3-DOF robotic arm is
considered, as illustrated in Figure 1. Under the
assumption of operation around equilibrium, it is
assumed that the roll and pitch angles are negligible,
which allows simplifying the quadrotor kinematics by
considering only translations in the horizontal plane
and a constant yaw orientation (Guayasamín et al.,
2018).
Figure 1: Quadrotor Robot.
𝑥
𝑦
𝑧
cos 𝜓−sin 𝜓 0
sin 𝜓 cos 𝜓 0
001
𝑉
𝑉
𝑉
,
1
where 𝑉
, 𝑉
and 𝑉
are the linear velocities of the
quadrotor,
𝑥
, 𝑦
, 𝑧
represents the position with
respect to the quadrotor’s 𝑋, 𝑌 and 𝑍 axes, 𝜓 is the
rotation angle of the quadrotor about the 𝑍-axis, and
𝑙
is the vertical distance from the quadrotor’s base to
its center of mass.
2.2 Robotic Arm Modeling
A 3-DOF robotic arm is considered, as shown in
Figure 2. By applying the Denavit-Hartenberg
algorithm, the system’s forward kinematic model is
determined (Guayasamín et al., 2018), which is
expressed as follows:
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
228
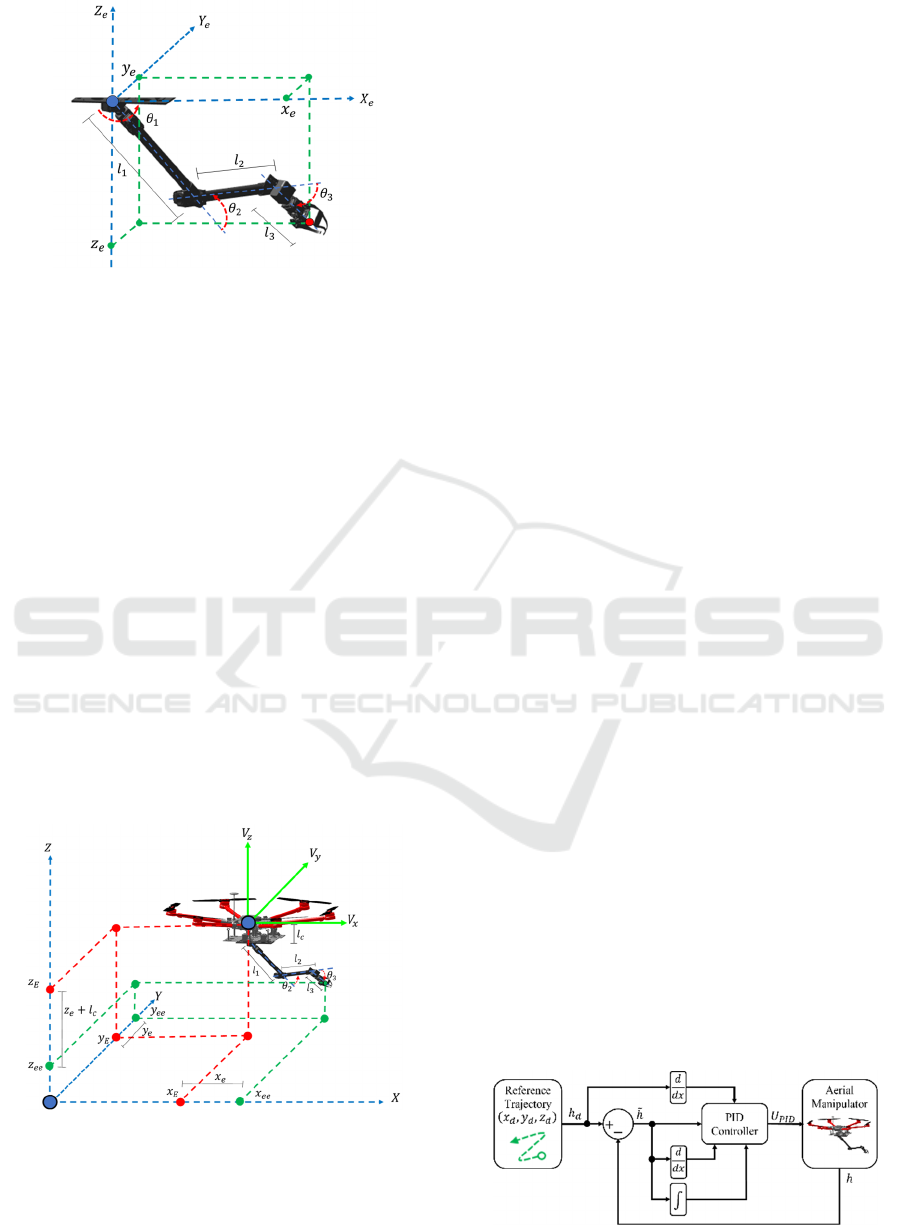
Figure 2: 3-DOF Robotic Arm.
𝑥
𝑦
𝑧
cos 𝜃
𝑙
cos 𝜃
𝑙
cos
𝜃
𝜃
sin 𝜃
𝑙
cos 𝜃
𝑙
cos
𝜃
𝜃
−𝑙
sin 𝜃
−𝑙
sin 𝜃
𝑙
sin
𝜃
𝜃
.
2
The parameters 𝑙
, 𝑙
, and 𝑙
denote the link
lengths, 𝜃
, 𝜃
, and 𝜃
are the joint angles, and
𝑥
, 𝑦
, 𝑧
represents the position of the
manipulator’s end-effector with respect to the 𝑋
, 𝑌
,
and 𝑍
axes.
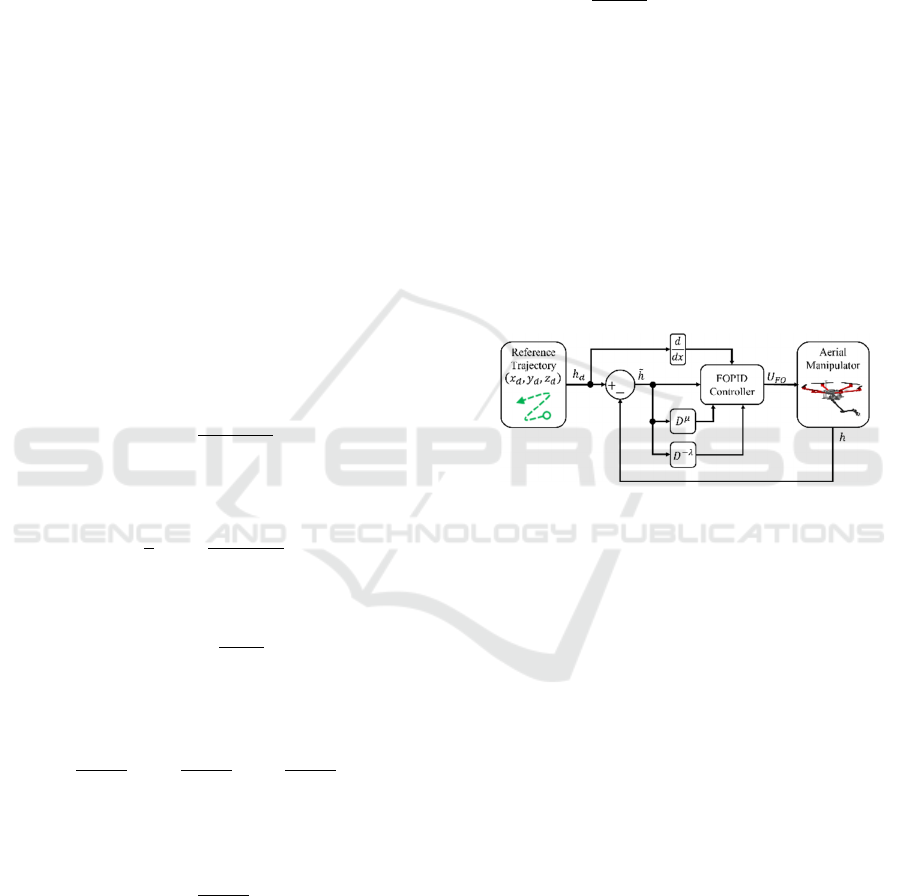
2.3 Aerial Manipulator Modeling
The robotic system is formed by coupling the
quadrotor with the previously described robotic arm.
To obtain the combined model, it is considered that
the end-effector’s position is now influenced by the
quadrotor’s position, such that the end-effector
position is given by
𝑥
, 𝑦
, 𝑧
𝑥
𝑥
, 𝑦
𝑦
, 𝑧
𝑧
𝑙
, where
𝑥
, 𝑦
, 𝑧
denotes the position of the aerial manipulator’s end-
effector in 𝑋, 𝑌, and 𝑍 axes.
Figure 3: Unmanned Aerial Manipulator Robot.
It is considered that there exists an angle 𝜃
influenced by the quadrotor’s yaw orientation 𝜓 and
the angle 𝜃
of the first joint of the robotic arm, such
that 𝜃
𝜃
𝜓 . Based on these considerations, the
kinematic model of the UAM is given by:
ℎ
𝐽𝑈,
3
The vector ℎ
𝑥
, 𝑦
, 𝑧
represents the
time derivative of the position of the end-effector of
the aerial manipulator. The input vector of the system
is defined as 𝑈𝑉
, 𝑉
, 𝑉
, 𝜓
, 𝜃
, 𝜃
, 𝜃
where
𝜓
is the angular velocity of the quadrotor around the
Z-axis. The angular velocities of each joint of the
robotic arm are 𝜃
, 𝜃
, and 𝜃
.
The matrix 𝐽 is the Jacobian of the complete
system and is defined as:
𝐽
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎡
𝐶
𝜓
−𝑆
𝜓
0
−𝑆
𝜃
1
𝜓
𝐿
𝐶
23
−𝑆
𝜃
1
𝜓
𝐿
𝐶
23
−𝐶
𝜃
1
𝜓
𝐿
𝑆
23
−𝑙
3
𝐶
𝜃
1
𝜓
𝑆
𝜃
2
𝜃
3
𝑆
𝜓
𝐶
𝜓
0
𝐶
𝜃
1
𝜓
𝐿
𝐶
23
𝐶
𝜃
1
𝜓
𝐿
𝐶
23
−𝑆
𝜃
1
𝜓
𝐿
𝑆
23
−𝑙
3
𝑆
𝜃
1
𝜓
𝐶
𝜃
2
𝜃
3
0
0
1
0
0
𝐿′
𝐶
23
𝑙
3
𝐶
𝜃
2
𝜃
3
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎤
𝑻
.
4
The equivalent nomenclature is 𝐶
cos 𝜓,
𝑆
sin 𝜓, 𝑆
sin
𝜃
𝜓
, 𝐶
cos 𝜃
,
𝑆
sin 𝜃
, 𝐶
cos
𝜃
𝜃
, 𝐶
cos
𝜃
𝜓
, 𝑆
sin
𝜃
𝜃
, 𝐿
𝑙
𝐶
𝑙
𝐶
, 𝐿
𝑙
𝑆
𝑙
𝑆
, and 𝐿′
−𝑙
𝐶
𝑙
𝐶
.
3 CONTROLLERS
This section analyzes the stability of the control laws
using Lyapunov functions. The tracking error is
defined as ℎ
ℎ
−ℎ, where ℎ
𝑥
, 𝑦
, 𝑧
represents the actual position of the end-effector, and
ℎ
𝑥
, 𝑦
, 𝑧
denotes the desired position of
the end-effector, which may vary over time.
3.1 PID Controller
The classical PID control scheme is illustrated in
Figure 4.
Figure 4: PID Control Scheme.
FOPID-Based Trajectory Control for an Unmanned Aerial Robotic Manipulator
229
A PID-type control law is proposed for trajectory
tracking of the UAM (Li et al., 2023), given by:
𝑈
𝐽
#
ℎ
𝑘
ℎ
𝑘
ℎ
𝑑𝑡𝑘
ℎ
.
5
The gains 𝑘
, 𝑘
, 𝑘
0 represent the PID
controller parameters, respectively, and ℎ
ℎ
−ℎ
is the tracking error. Defining the integral term as 𝑧
ℎ
𝑑𝑡, with 𝑧ℎ
, the above expression can be
rewritten as:
𝑈
𝐽
#
ℎ
𝑘
ℎ
𝑘
𝑧𝑘
ℎ
.
6
The time derivative of the tracking error is
ℎ
ℎ
−ℎ
,
and combining this with the kinematic model (3), we
obtain:
ℎ
ℎ
−𝐽𝑈.
7
Assuming perfect velocity tracking, i.e., 𝑈𝑈
,
and substituting (6) into (7), the closed-loop system
becomes:
ℎ
−𝑘
ℎ
−𝑘
𝑧−𝑘
ℎ
.
8
Solving for ℎ
, we obtain:
ℎ
−
𝑘
ℎ
𝑘
𝑧
1 𝑘
,
9
The following Lyapunov candidate function is
proposed:
𝑉
1
2
ℎ
ℎ
𝑘
2
1 𝑘
𝑧
𝑧.
10
Its time derivative is given by:
𝑉
ℎ
𝑇
ℎ
𝑘
𝑖
1𝑘
𝑑
𝑧
𝑇
𝑧
.
11
Substituting (9) into (11) and expanding the terms
yields:
𝑉
−
𝑘
1 𝑘
ℎ
ℎ
−
𝑘
1 𝑘
ℎ
𝑧
𝑘
1 𝑘
𝑧
ℎ
.
12
Since ℎ
𝑧𝑧
ℎ
, the cross terms cancel out,
resulting in:
𝑉
−
𝑘
1 𝑘
ℎ
ℎ
.
13
This expression guarantees that ℎ
and z are
bounded, i.e., ℎ
∈𝐿
and 𝑧∈𝐿
. To demonstrate
that the errors converge to zero, LaSalle’s invariance
principle is applied. The invariant set is defined as:
𝑆ℎ
, 𝑧∈ℝ
𝑥ℝ
: 𝑉
0→ℎ
0. (14)
Thus, ℎ
0 , and since 𝑧ℎ
0, it follows that
𝑧𝑐𝑜𝑛𝑠𝑡. Therefore, the system’s solutions
converge to the largest invariant set contained in 𝑆,
namely:
𝑀ℎ
, 𝑧: ℎ
0, 𝑧𝑐𝑜𝑛𝑠𝑡. (15)
Given that
(
)
𝑧
𝑧→𝑐𝑜𝑛𝑠𝑡, and considering
that 𝑉 is decreasing, it is concluded that ℎ
→0 as 𝑡→
∞. This result demonstrates the asymptotic stability
of the system under the proposed PID control law.
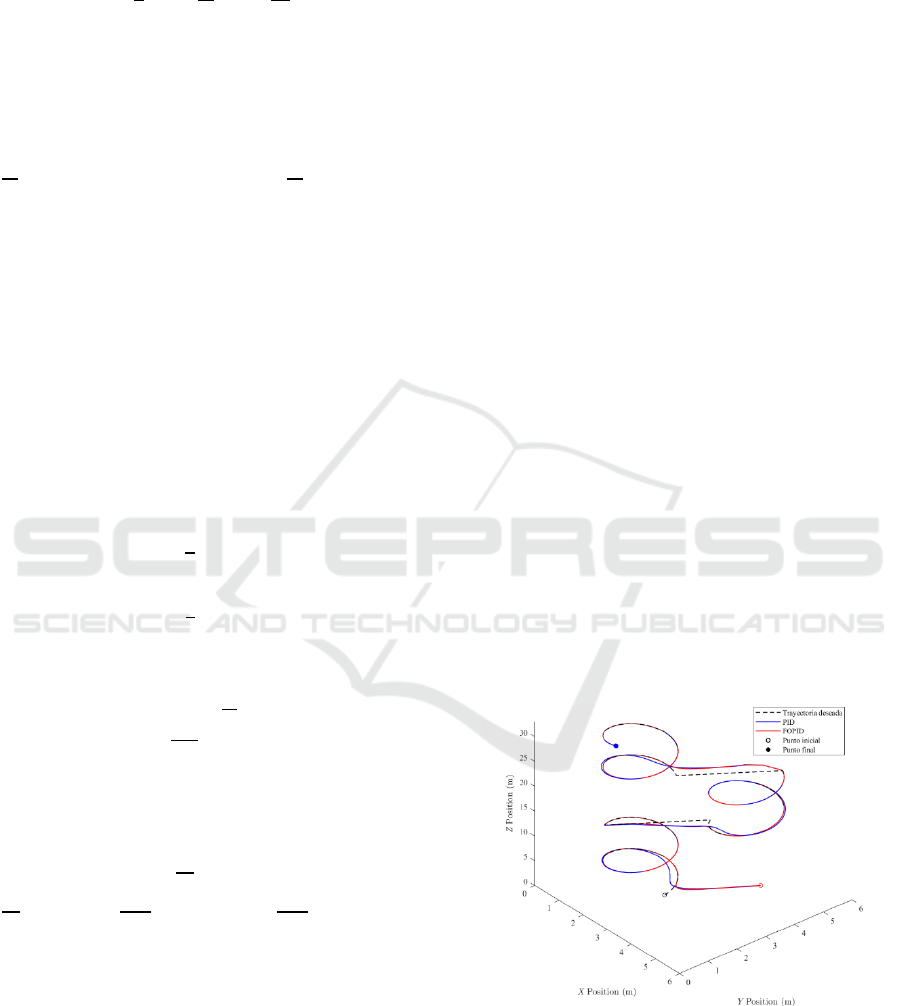
3.2 Fopid Controller
For the design of the fractional-order PID controller
(FOPID), the Caputo definition is adopted (Shah &
Agashe, 2016), as it enables the derivative and
integral actions of the controller to be represented
through fractional-order operators applied to the
tracking error. The proposed control scheme is
illustrated in Figure 5.
Figure 5: FOPID control scheme.
The proposed control law is defined as (A. Faraj
& Mohammed Abbood, 2021):
𝑈
𝐽
#
ℎ
𝑘
ℎ
𝑘
𝐷
ℎ
𝑘
𝐷
ℎ
.
(
16
)
The gains 𝑘
, 𝑘
, 𝑘
0 represent the PID
controller parameters, and 𝐷
denotes the fractional
differential or integral operator of order 𝑛 , and ℎ
is
the tracking error. The state 𝑧
𝐷
ℎ
is defined as
the fractional integral of order 𝜆∈0,1, such that
ℎ
𝐷
𝑧
, while the state 𝑧
𝐷
ℎ
corresponds to
the fractional derivative of order 𝜇 ∈0,1 with ℎ
𝐷
𝑧
. By substituting these expressions into (15),
the control law can be rewritten as:
𝑈
𝐽
#
ℎ
𝑘
ℎ
𝑘
𝑧
𝑘
𝑧
.
(
17
)
Assuming perfect velocity tracking, we have 𝑈
𝑈
. Replacing (17) into the kinematic model (3), the
closed-loop dynamics are obtained as:
ℎ
−𝑘
𝑝
ℎ
−𝑘
𝑖
𝑧
𝑖
−𝑘
𝑑
𝑧
𝑑
.
(
18
)
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
230
To analyze stability, the following Lyapunov
candidate function is proposed:
𝑉
=
1
2
ℎ
ℎ
+
𝑘
2
𝑧
𝑧
+
𝑘
2
𝑧
𝑧
.
(
19
)
By differentiating (19) with respect to time, we
obtain:
𝑉
= ℎ
ℎ
+ 𝑘
𝑧
𝑧
+ 𝑘
𝑧
𝑧
.
(
20
)
Considering the fractional relationships:: 𝑧
=
ℎ
𝑑𝑡= ℎ
= 𝐷
𝑧
, and 𝑧
=
ℎ
= ℎ
=
𝐷
𝑧
; and substituting into (20), we get:
𝑉
= ℎ
ℎ
+ 𝑘
𝑧
𝐷
𝑧
+ 𝑘
𝑧
𝐷
𝑧
.
(
21
)
Given the previously defined state variables, the
Lyapunov derivative can be rewritten as:
𝑉
= ℎ
ℎ
+ 𝑘
𝑧
ℎ
+ 𝑘
𝑧
ℎ
.
(
22
)
Substituting (18) into (22) and expanding, we obtain:
𝑉
= −𝑘
ℎ
ℎ
−𝑘
𝑧
𝑧
−𝑘
1+𝑘
𝑧
ℎ
−𝑘
𝑘
𝑧
𝑧
.
(
23
)
Applying Young's inequality to bound the cross
terms:
𝑧
ℎ
≤
1
2
𝑧
𝑧
+ ℎ
ℎ
.
(
24
)
𝑧
𝑧
≤
1
2
𝑧
𝑧
+ 𝑧
𝑧
.
(
25
)
Rewriting (23) in terms of inequalities, we obtain:
𝑉
≤−𝑘
ℎ
ℎ
−𝑘
𝑧
𝑧
−
1+𝑘
𝑧
𝑧
+ ℎ
ℎ
−
𝑧
𝑧
+ 𝑧
𝑧
. (26)
Developing (26) leads to:
𝑉
≤−𝐾
ℎ
ℎ
−𝐾
𝑧
𝑧
−𝐾
𝑧
𝑧
,
(
27
)
where 𝐾
= 𝑘
+
1+𝑘
, 𝐾
= 𝑘
+
1+𝑘
+
, and 𝐾
=
, are strictly
positive constants.
Since 𝑉
≤0 , the system is Lyapunov stable.
Furthermore, the positivity of the coefficients
guarantees that ℎ
, 𝑧
, 𝑧
→0 as 𝑡→∞, confirming
the asymptotic convergence of the tracking error
under the proposed FOPID controller.
4 TESTS AND RESULTS
This section presents the simulation results
corresponding to the two proposed control
algorithms: classical PID and fractional-order PID
(FOPID). The objective is to compare the
performance of each controller under identical
operating conditions. Quantitative evaluation is
carried out using the Integral of Squared Error (ISE)
performance index applied to the tracking error in
each coordinate of the aerial manipulator’s end-
effector.
The desired trajectory for the end-effector was
defined as: ℎ
(
𝑡
)
=
𝑥
, 𝑦
, 𝑧
=
𝑐𝑜𝑠
(
𝑡/2
)
+2,
𝑠𝑖𝑛
(
𝑡/2
)
+2 , 𝑡/2
. The simulation was run for
60 s. Additionally, to assess the controllers'
adaptability to abrupt changes, a disturbance was
introduced in the desired trajectory between 20 s and
40 s, consisting of a constant increment of 2 m applied
to each coordinate.
Both controllers employed the same PID gains,
with values 𝑘
=3, 𝑘
=0.1, and 𝑘
=1, which
were obtained through a tuning process based on the
minimization of the ISE index. For the FOPID
controller, the fractional orders 𝜆 and 𝜇, associated
with the integral and derivative actions respectively,
were incorporated. These values were selected using
heuristic methods aimed at improving performance
relative to the classical PID. The values used were
𝜆=0.1 and 𝜇=0.8 . Under these conditions,
simulations were conducted for both control schemes,
comparing the tracking errors and the resulting ISE
indices across the three coordinates.
Figure 6: End-Effector Trajectory under PID and FOPID
Control.
Figure 6 shows the evolution of the end-effector
trajectories under classical PID and FOPID control,
compared to the desired trajectory. It can be observed
that both controllers are capable of achieving the
FOPID-Based Trajectory Control for an Unmanned Aerial Robotic Manipulator
231
desired trajectory; however, the FOPID exhibits
faster convergence and a smoother response,
especially when facing abrupt changes in the
reference.
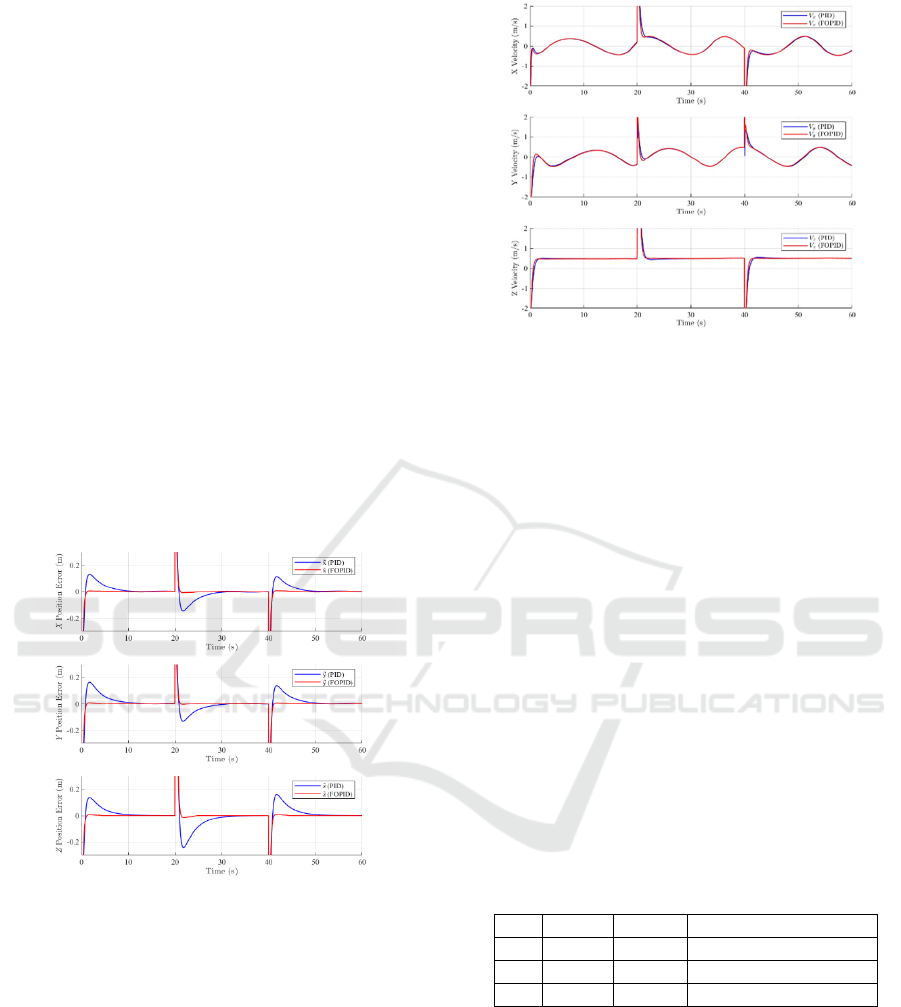
Figure 7 depicts the temporal evolution of the
position error in each coordinate of the end-effector
under classical PID and FOPID control. The errors
are displayed within a bounded range of 0.3 m to
facilitate comparison of the dynamic behavior of the
controllers. Peaks in the error occur simultaneously in
both strategies and correspond to the abrupt changes
in the desired trajectory applied between 20 s and 40
s, with magnitudes being practically equal.
Nonetheless, the FOPID demonstrates a significantly
superior ability to correct the error. While the PID
requires approximately 10 s to nullify the error after
the reference change, the FOPID achieves the desired
tracking within about 1 s. Overall, the PID controller
exhibits an underdamped behavior with error
overshoots and longer settling times. In contrast, the
FOPID provides a faster and smoother response,
effectively eliminating the error without notable
overshoot.
Figure 7: Position errors.
Figure 8 shows three of the seven control signals
generated by each controller, corresponding to the
linear velocities of the aerial manipulator. These
signals are plotted within a 2 m/s range to facilitate
a clearer comparison of their dynamic differences. It
can be observed that, at steady state, both control
strategies reach similar values, indicating that the
control signals converge to the same regime.
However, during the transients caused by the
reference changes at 20 s and 40 s, slight differences
appear. The FOPID tends to generate smoother and
less oscillatory signals, whereas the PID exhibits
more abrupt responses, consistent with its less
damped behavior observed in the position error.
Figure 8: Linear velocity control signals.
5 DISCUSSION
The results obtained show that the FOPID controller
implemented performs better than the PID controller,
considering that the calibration parameters
(proportional, derivative, and integrator) were the
same for both controllers. Table 1 presents the
performance indices ISE derived from the position
errors in the three coordinates (𝑥, 𝑦, 𝑧) for both
controllers, along with the relative percentage
improvement achieved by the FOPID. The
quantitative analysis reveals that the FOPID
consistently reduces the ISE values across all
coordinates, indicating more accurate tracking of the
desired trajectory. On average, the FOPID improves
performance by 21.27 %, relative to the PID, which
supports its faster and smoother response, as also
observed in the trajectories shown in Figure 6 and the
error evolution in Figure 7.
Table 1: ISE Resulting ISE for Each Controller.
ISE PID FOPID % Improvement
𝑥 1.5526 1.1884 23.46%
𝑦 1.9318 1.4490 24.99%
𝑧
̃
2.5807 2.1846 15.35%
These results validate the effectiveness of the
fractional orders 𝜆 and 𝜇 in enhancing the dynamic
behavior of the system by enabling finer tuning of the
controller, particularly in scenarios involving abrupt
changes in the reference trajectory. The
implementation of the FOPID controller entails
increased complexity in tuning, as it requires
adjusting five parameters instead of the three used in
the classical PID controller. To simplify this process,
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
232

an efficient sequential tuning strategy was applied:
first, the PID parameters were tuned, followed by the
optimization of the fractional orders. This approach
reduces the search space and facilitates improved
system performance. While these results confirm the
efficacy of the kinematic approach under ideal
conditions, it is acknowledged that its performance
may degrade in scenarios where the payload or
manipulator arm dynamics significantly influence the
UAV's behavior. In such cases, future work should
consider extending the approach to incorporate
coupled dynamic models or robust control.
6 CONCLUSIONS
Based on the obtained results, it is evident that the
FOPID controller demonstrated superior performance
compared to the classical PID, achieving faster and
more precise trajectory tracking with reduced
oscillations. This improvement was also observed in
response to abrupt changes in the reference trajectory,
to which both controllers were subjected. The FOPID
achieved a 21.27% improvement in the ISE compared
to the classical PID. Although the FOPID requires
tuning of five parameters compared to three in the
classical controller, this provides greater flexibility in
the adjustment process. Overall, the results validate
the use of the FOPID as an efficient solution for
trajectory tracking control of aerial manipulators
under demanding conditions. Furthermore, since this
control approach is model-free, it opens a future
research avenue for aerial manipulators, focusing on
robust and adaptive FOPID strategies to compensate
for the complex dynamics of these robots.
As future work, we propose to extend the
approach to schemes that incorporate coupled
dynamics of the aerial manipulator, in order to
evaluate how the dynamics of the arm affect the
robotic system. The implementation of robust
controllers based on FOPID will be analyzed.
ACKNOWLEDGEMENTS
The authors would like to express their sincere
gratitude to the Escuela Politécnica Nacional for the
financial support provided for research, development,
and innovation through the project PIS-23-09:
Artificial Intelligence Techniques Applied to an
Aerial Manipulator in Semi-structured Environments.
The authors also acknowledge the support from the
Universidad de las Fuerzas Armadas ESPE through
the project PIEX-DACI-ESPE-24: Autonomous
Control of Aerial Manipulator Robots. Finally, the
authors are grateful to the ARSI and GIECAR
research groups for their valuable theoretical
contributions and technical support throughout the
development of this work.
REFERENCES
A. Faraj, M., & Mohammed Abbood, A. (2021). Fractional
order PID controller tuned by bat algorithm for robot
trajectory control. Indonesian Journal of Electrical
Engineering and Computer Science, 21(1), 74.
https://doi.org/10.11591/ijeecs.v21.i1.pp74-83
Cajo, R., Mac, T., PLaza, D., Copot, C., Keyser, D., &
Ionescu, C. (2019). A Survey on Fractional Order
Control Techniques for Unmanned Aerial and Ground
Vehicles. 66864–66878. https://doi.org/10.1109/AC
CESS.2019.2918578
Cao, G., Zhao, X., Ye, C., Yu, S., Li, B., & Jiang, C. (2022).
Fuzzy adaptive PID control method for multi-
mecanum-wheeled mobile robot. 2019–2029.
https://doi.org/10.1007/s12206-022-0337-x
Carvajal, C. P., Andaluz, G. M., Andaluz, V. H., Roberti,
F., Palacios-Navarro, G., & Carelli, R. (2024).
Multitask control of aerial manipulator robots with
dynamic compensation based on numerical methods.
Robotics and Autonomous Systems, 173, 104614.
https://doi.org/10.1016/j.robot.2023.104614
Delgado-Reyes, G., Valdez-Martínez, J. S., Guevara-
López, P., & Hernández-Pérez, M. A. (2024). Hover
Flight Improvement of a Quadrotor Unmanned Aerial
Vehicle Using PID Controllers with an Integral Effect
Based on the Riemann–Liouville Fractional-Order
Operator: A Deterministic Approach. Fractal and
Fractional, 8(11), 634. https://doi.org/10.3390/frac
talfract8110634
Ghamari, S., Narm, H., & Mollaee, H. (2022). Fractional-
order fuzzy PID controller design on buck converter
with antlion optimization algorithm. 340–352.
https://doi.org/10.1049/cth2.12230
Guayasamín, A., Leica, P., Herrera, M., & Camacho, O.
(2018). Trajectory Tracking Control for Aerial
Manipulator Based on Lyapunov and Sliding Mode
Control. 36–41. https://doi.org/10.1109/INCISCOS
.2018.00013.
Leica, P., Camacho, O., Lozada, S., Guamán, R., Chávez,
D., & Andaluz, V. H. (2017). Comparison of control
schemes for path tracking of mobile manipulators. 28,
86–96. https://doi.org/10.1504/IJMIC.2017.085300
Li, J., Chen, P., Chang, Z., Zhang, G., Guo, L., & Zhao, C.
(2023). Trajectory Tracking Control of Quadrotor
Based on Fractional-Order S-Plane Model. Machines,
11(7), 672. https://doi.org/10.3390/machines11070672
Mohamed, M. J., Oleiwi, B. K., Abood, L. H., Azar, A. T.,
& Hameed, I. A. (2023). Neural Fractional Order PID
Controllers Design for 2-Link Rigid Robot
FOPID-Based Trajectory Control for an Unmanned Aerial Robotic Manipulator
233

Manipulator. Fractal and Fractional, 7(9), 693.
https://doi.org/10.3390/fractalfract7090693
Moya, V., Espinosa, V., Chavez, D., Leica, P., & Camacho,
O. (2016). Trajectory tracking for quadcopter’s
formation with two control strategies. 2016 IEEE
Ecuador Technical Chapters Meeting (ETCM), 1–6.
https://doi.org/10.1109/ETCM.2016.7750839
Mundheda, V., Mirakhor, K., Rahul, K. S., & Govindan, N.
(2023). Predictive Barrier Lyapunov Function Based
Control for Safe Trajectory Tracking of an Aerial
Manipulator. 1–6. https://doi.org/10.23919/ECC57647.
2023.10178336.
Noordin, A., Mohd Basri, M. A., & Mohamed, Z. (2022).
Position and Attitude Tracking of MAV Quadrotor
Using SMC-Based Adaptive PID Controller. Drones,
6(9), 263. https://doi.org/10.3390/drones6090263
Shah, P., & Agashe, S. (2016). Review of fractional PID
controller. Mechatronics, 38, 29–41. https://doi.org/
10.1016/j.mechatronics.2016.06.005
Shao, K., Xia, W., Zhu, Y., Sun, C., & Liu, Y. (2025).
Research on UAV Trajectory Tracking Control System
Based on Feedback Linearization Control–Fractional
Order Model Predictive Control. Processes, 13(3), 801.
https://doi.org/10.3390/pr13030801
Sharma, A., Gupta, S., Singh, S. P., Yadav, R. D., Song, H.,
Pan, W., Roy, S., & Baldi, S. (2025). Impedance and
Stability Targeted Adaptation for Aerial Manipulator
with Unknown Coupling Dynamics
(arXiv:2504.01983). arXiv. https://doi.org/10.48550/
arXiv.2504.01983
Suid, M. H., & Ahmad, M. A. (2022). Optimal tuning of
sigmoid PID controller using Nonlinear Sine Cosine
Algorithm for the Automatic Voltage Regulator system.
128, 265–286. https://doi.org/10.1016/j.isatra.2021
.11.037
Timis, D. D., Muresan, C. I., & Dulf, E.-H. (2022). Design
and Experimental Results of an Adaptive Fractional-
Order Controller for a Quadrotor. Fractal and
Fractional, 6(4), 204. https://doi.org/10.3390/fract
alfract6040204
Torvik, P. J., & Bagley, R. L. (1984). On the Appearance
of the Fractional Derivative in the Behavior of Real
Materials. Journal of Applied Mechanics, 51(2), 294–
298. https://doi.org/10.1115/1.3167615
Zhang, X., Xu, W., & Lu, W. (2021). Fractional-Order
Iterative Sliding Mode Control Based on the Neural
Network for Manipulator. Mathematical Problems in
Engineering, 2021, 1–12. https://doi.org/10.1155/
2021/9996719
Zheng, W., Li, Z., Zhan, L., Xiu, B., Zhao, B., & Guo, Z.
(2023). Robust fractional-order fast terminal sliding
mode control of aerial manipulator derived from a
mutable inertia parameters model. 2425, 012009.
https://doi.org/10.1088/1742-6596/2425/1/012009
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
234
