
Fault Diagnosis of Industrial Robots Using a Digital Twin and
GRU-Based Deep Learning
Ilhem Ben Hnaien
1 a
, Eric Gascard
2 b
, Zineb Simeu-Abazi
2 c
and Hedi Dhouibi
3
1
NOCCS Laboratory, Natl. Engr. School of Sousse, University of Sousse, Sousse, Tunisia
2
Univ. Grenoble Alpes, CNRS, Grenoble INP, G-SCOP, Grenoble, France
3
LARATSI Laboratory, High. Inst. of Appl. Sci. Technol. of Kairouan, University of Kairouan, Kairouan, Tunisia
Keywords:
Digital Twin, Fault Diagnosis, GRU Neural Network, Industrial Robot, Time-Series Classification.
Abstract:
This paper proposes a fault diagnosis method for industrial robots based on the combination of a digital twin
and a GRU-based deep learning model. A high-fidelity digital replica of the 6-DOF St
¨
aubli TX60 robot was
developed using MATLAB Simulink and Simscape Multibody to simulate both normal and faulty behaviors.
A dedicated fault injection module was used to generate motor blockage scenarios at different time instants,
creating a labeled dataset of 49 classes. The time-series data were then used to train a Gated Recurrent Unit
(GRU) neural network, which is efficient for modeling temporal patterns. The trained model achieved an
accuracy of 87.35%, with strong performance across different fault types. This approach enables reliable,
non-invasive, and repeatable fault diagnosis and provides a solid foundation for future work on predictive
maintenance and deployment on real robotic platforms.
1 INTRODUCTION
The increasing integration of industrial robots in man-
ufacturing systems has raised new challenges in terms
of reliability, safety, and maintenance. Joint-level fail-
ures, particularly actuator blockages, are among the
most common and disruptive fault types, often lead-
ing to performance degradation or production down-
time (Liu et al., 2021), (She et al., 2022). As produc-
tion lines become more automated, there is a pressing
need for intelligent diagnostic systems capable of de-
tecting, isolating, and identifying such faults in real
time, while minimizing the reliance on additional in-
trusive sensors or manual intervention. Our method-
ology can be seamlessly integrated with existing sen-
sory feedback to enhance mission-critical decision-
making and predictive maintenance capabilities (Yin
and Kaynak, 2015), (Lee et al., 2015), (Sabry and
Amirulddin, 2024). In this context, the digital twin
paradigm has emerged as a powerful framework for
predictive maintenance and fault diagnosis. A digital
twin is a virtual replica of a physical system that en-
ables real-time simulation and monitoring of system
a
https://orcid.org/0009-0003-9972-2213
b
https://orcid.org/0000-0003-4332-0752
c
https://orcid.org/0000-0002-1660-3960
behavior under varying operating conditions (Grieves,
2022). Combined with artificial intelligence (AI), it
facilitates the generation of realistic training data and
enables non-destructive experimentation—two criti-
cal aspects for the development of robust diagnostic
models.
Related Work. Previous studies have explored
data-driven fault diagnosis in robotic systems us-
ing traditional classifiers, support vector machines
(SVM), or statistical models. For example, Liu et
al. (Liu et al., 2021) proposed sensorless force es-
timation using disturbance observers, while Sabry
and Amirulddin (Sabry and Amirulddin, 2024) pro-
vided a comprehensive review of robot fault detection
techniques. Our contribution differs by integrating a
physics-based digital twin with temporal deep learn-
ing models, enabling non-invasive and repeatable di-
agnosis under complex dynamic conditions. Com-
pared to conventional thresholding or signal mod-
eling approaches, our method leverages simulation-
driven data generation and time-series classification,
providing higher scalability and adaptability to future
robotic platforms.
The main objective of this study is to propose
an integrated methodology that leverages a high-
Ben Hnaien, I., Gascard, E., Simeu-Abazi, Z. and Dhouibi, H.
Fault Diagnosis of Industrial Robots Using a Digital Twin and GRU-Based Deep Learning.
DOI: 10.5220/0013705600003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 487-494
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
487

fidelity digital twin and a deep learning model to
diagnose actuator-level faults in a 6-DOF industrial
robot (St
¨
aubli TX60). While several works have ex-
plored the use of recurrent neural networks (RNNs)
for time-series classification, we focus here on Gated
Recurrent Units (GRU), a variant of RNNs known
for its computational efficiency and ability to capture
long-term dependencies in sequential data (Cho et al.,
2014). GRU are particularly suitable for robotic fault
diagnosis, where the temporal evolution of joint tra-
jectories provides essential clues for identifying fail-
ure types and their onset times. The proposed contri-
bution consists in (i) developing a comprehensive dig-
ital twin in MATLAB Simulink and Simscape Multi-
body, capable of replicating both nominal and faulty
dynamics of the TX60 robot; (ii) implementing a
structured fault injection module that introduces ran-
dom motor blockages at selected instants (e.g., 0.1
s, 0.4 s, 0.5 s); (iii) generating a labeled dataset of
time-series responses; and (iv) training a GRU-based
neural network classifier in Python to distinguish be-
tween 49 different scenarios (48 faults + 1 normal
state). Our methodology is illustrated in Figure 1,
which summarizes the full pipeline—from fault sim-
ulation to neural classification. The real robot serves
as a validation reference, while the digital twin pro-
duces repeatable scenarios for training and evalua-
tion. Fault signatures extracted from joint trajecto-
ries are used to teach the model how to recognize dis-
tinct fault types and their corresponding time profiles.
The remainder of this paper is structured as follows.
Section 2 details the proposed methodology, includ-
ing the digital twin setup, data generation strategy,
and GRU-based classification approach. Section 3
presents the digital twin architecture and fault simu-
lation procedures. Section 4 describes the data prepa-
ration pipeline and neural network training. Section 5
discusses the model’s performance through accuracy
plots, confusion matrix, and detailed classification
metrics. Finally, conclusions and future directions are
outlined in Section 6.
2 METHODOLOGY
The proposed methodology, illustrated in Figure 1,
combines a physics-based digital twin with a data-
driven deep learning classifier to enable accurate fault
diagnosis on the St
¨
aubli TX60 robotic arm. The real
system serves as a reference for validating the be-
havior of a high-fidelity virtual replica developed in
MATLAB Simulink and Simscape Multibody.
This digital twin replicates both nominal and
faulty conditions and includes a fault injection mod-
ule that simulates motor blockage at predefined in-
stants (e.g., 0.1 s, 0.4 s, 0.5 s) to generate diverse
and controlled fault scenarios. These simulations pro-
duce time series representing joint angles and end-
effector positions, which are then collected and seg-
mented into sequences of 10 time steps. The result-
ing labeled dataset, composed of 49 distinct classes
(48 fault scenarios and one nominal state), is used
to train a Gated Recurrent Unit (GRU) neural net-
work. GRU is a variant of recurrent neural networks
optimized for temporal pattern recognition, offering
a simplified architecture compared to LSTMs while
maintaining performance in sequence modeling (Cho
et al., 2014). The model is trained in Python over
100 epochs using the Adam optimizer and categor-
ical cross-entropy loss. Stratified splitting ensures
class balance across training and test sets. This inte-
grated simulation-learning framework provides a re-
producible and non-destructive approach for diagnos-
ing robotic joint faults under dynamic conditions.
3 DIGITAL TWIN AND FAULT
SIMULATION
The concept of the digital twin plays a central role
in modern fault detection strategies. It enables real-
time simulation, fault injection, and behavioral anal-
ysis without relying on physical hardware. In this
work, a digital twin of the St
¨
aubli TX60 industrial
robot was developed to replicate both its nominal and
faulty operations. This twin was used to generate rep-
resentative data under different scenarios for training
and evaluating a neural network-based diagnoser.
3.1 Digital Model of the Robotic System
To accurately represent the behavior of the St
¨
aubli
TX60 robot, a high-fidelity digital twin was devel-
oped using MATLAB Simulink and Simscape Multi-
body (Boschetti and Sinico, 2024). This digital model
reproduces the kinematic and dynamic characteristics
of the robot under nominal conditions and serves as
a reference for fault diagnosis. The CAD structure of
the robot was imported in STEP format and integrated
into the Simscape environment via the Simulink in-
terface. The kinematic chain was reconstructed, and a
dynamic model was built using polynomial trajectory
generation, inverse and forward kinematics, and joint
actuation. Each joint is actuated by a dedicated motor,
and the control architecture relies on feedback loops
to track desired trajectories. The model simulates the
3D motion of the end-effector as it follows prede-
fined paths, such as square trajectories in Cartesian
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
488
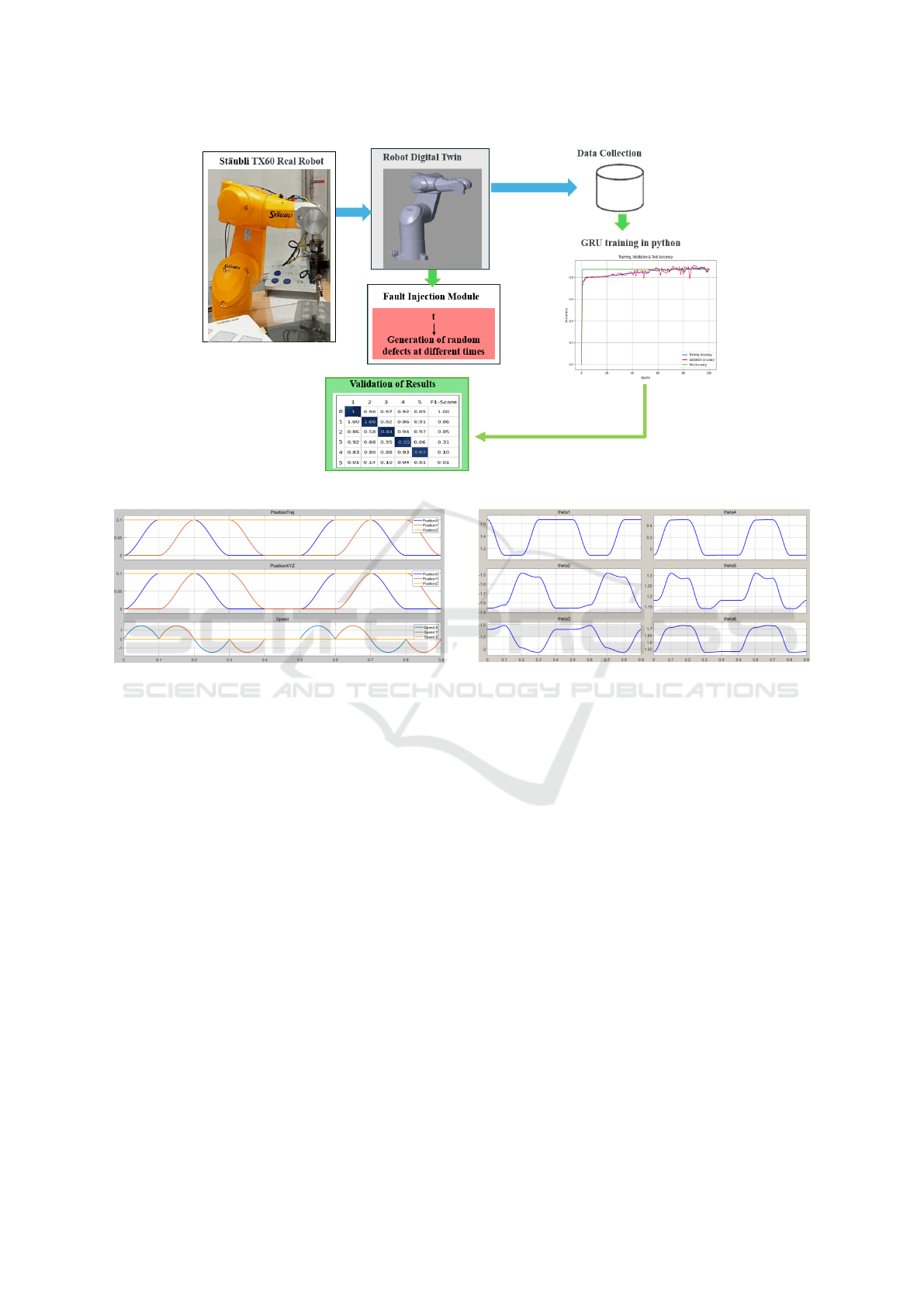
Figure 1: Overview of the Developed Digital Twin Architecture for Fault Diagnosis of the St
¨
aubli TX60 Robot.
Figure 2: Cartesian End-Effector Trajectories: Two Square
Paths Executed by the Robot.
space. An overview of the developed digital twin is
illustrated in Figure 1, where the virtual model of the
St
¨
aubli TX60 highlights the overall diagnostic frame-
work, including simulation and data extraction mod-
ules.
As shown in Figure 2, the robot executes two
square trajectories. The first trajectory spans from
t = 0 s to t = 0.4 s, and the second trajectory starts
from t = 0.5 s to t = 0.9 s. These paths are designed
to test the system’s behavior under both normal and
faulty conditions. The corresponding joint angles for
both trajectories are presented in Figure 3, which pro-
vides insights into the coordinated movements of the
robot’s six joints (θ
1
to θ
6
).
In our previous work (Hnaien et al., 2024), the
TX60 was used as a physical reference model for de-
veloping a digital twin focused specifically on the arm
and shoulder subsystems, with an emphasis on a fault
scenario involving the position sensor. Building on
that foundation, this study extends the digital twin to
the full robot structure and explores motor-level faults
under dynamic conditions.
Figure 3: Joint Angle Responses (θ
1
to θ
6
) During Nominal
Operation for Two Square Trajectories.
3.2 Fault Injection and Signature
Generation
To simulate fault conditions, a dedicated fault injec-
tion module was integrated into the Simulink-based
digital twin. This module enables the insertion of spe-
cific motor faults—namely, blockage of one of the six
actuators—at controlled time instants. Each fault sce-
nario corresponds to one motor being locked (from
motor 1 to motor 6), allowing the system to exhibit
a distinct dynamic deviation in its joint trajectory.
These predefined scenarios were injected both man-
ually and randomly through a centralized subsystem
managing all fault modes. This ensures consistency
across simulations and enables capturing the tempo-
ral evolution of joint responses after fault injection.
As illustrated in Figure 4, the angular trajectory of
joint 4 (θ
4
) deviates noticeably when a blockage fault
is introduced at t = 0.2 s, showcasing a fault-induced
divergence from the nominal behavior. This approach
ensures temporal diversity essential for training a ro-
bust classification model. The labeled time series
Fault Diagnosis of Industrial Robots Using a Digital Twin and GRU-Based Deep Learning
489

Figure 4: Variation of Joint 4 Angular Trajectory Under
Normal Conditions and Following a Motor Blockage at t
= 0.2 s.
formed the input to the GRU-based neural network.
Although the fault injection times were discretely se-
lected (from 0.1 s to 0.8 s), this strategy provides a
structured dataset with consistent fault labels. How-
ever, it inherently limits the realism of fault onset be-
havior, as real-world faults may appear gradually or
at arbitrary times. This constraint will be addressed
in future work through continuous-time fault injection
mechanisms or stochastic fault onset modeling to bet-
ter reflect practical scenarios.
4 DATA PREPARATION AND
DEEP LEARNING MODEL
The success of a data-driven fault classification sys-
tem critically depends on the quality of the dataset
and the architecture of the learning model. This sec-
tion describes the procedures followed for generating,
preprocessing, and structuring the data, as well as the
design and training of the GRU-based neural network
classifier.
4.1 Data Collection and Preprocessing
The dataset was generated entirely from simulations
conducted within the digital twin environment of the
6-degree-of-freedom (6-DOF) St
¨
aubli TX60 robot.
The resulting labeled dataset was composed of 49 dis-
tinct classes—including 48 fault scenarios generated
by injecting motor blockage at 8 time instants for each
of the 6 actuators (6 × 8), plus one nominal condition
(see Section 4 for details). In each simulation run,
a single fault was injected into one of the six joints
(θ
1
to θ
6
) by applying a motor blockage at specific
time instants ranging from 0.1 to 0.8 seconds. This
strategy led to 48 distinct faulty configurations, each
corresponding to a unique (joint, time) pair, in addi-
tion to a nominal operating state—resulting in a total
of 49 target classes.
Each simulation produced continuous multivariate
time series of joint angles and end-effector positions.
These signals were segmented into overlapping se-
quences of 10 consecutive time steps to capture the
temporal patterns associated with fault dynamics. In
order to ensure label consistency within each seg-
ment, only sequences for which at least 80% of the
samples belonged to the same class were retained.
This criterion reduced label noise and improved the
robustness of the classifier.
The resulting dataset was composed of samples
shaped as 3D tensors of size (number of sequences,
10, number of features). All features were normalized
using the StandardScaler method, which standardizes
input values to have zero mean and unit variance. This
step mitigates the effect of scale differences among
input signals and facilitates faster convergence during
training. The categorical class labels were converted
into one-hot encoded vectors to be compatible with
the softmax output layer used in the GRU network.
To ensure fair and balanced evaluation, the dataset
was split into training and testing subsets using strat-
ified sampling with an 80/20 ratio. This maintained
an even distribution of all fault types across the splits
and prevented class imbalance from biasing the learn-
ing process.
4.2 GRU-Based Fault Classifier
To classify the fault scenarios from sequential input
data, a deep learning model based on Gated Recur-
rent Units (GRU) was adopted. GRU is a class of
Recurrent Neural Networks (RNNs) that have been
specifically designed to overcome the vanishing gra-
dient problem often encountered in traditional RNNs
during long sequence learning. They achieve this by
incorporating update and reset gates, which allow the
model to adaptively control the flow of information
over time without the complexity of Long Short-Term
Memory (LSTM) cells (Cho et al., 2014). The de-
tailed architecture of the model is presented in the Ta-
ble 1.
The architecture was designed based on prelim-
inary experiments and insights from prior literature,
with the goal of balancing model complexity and rep-
resentational capacity. Specifically, the network com-
prises two successive GRU layers with 64 and 32
units, respectively. This configuration was found to
be sufficient for capturing temporal dependencies in
the data while mitigating the risk of overfitting.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
490
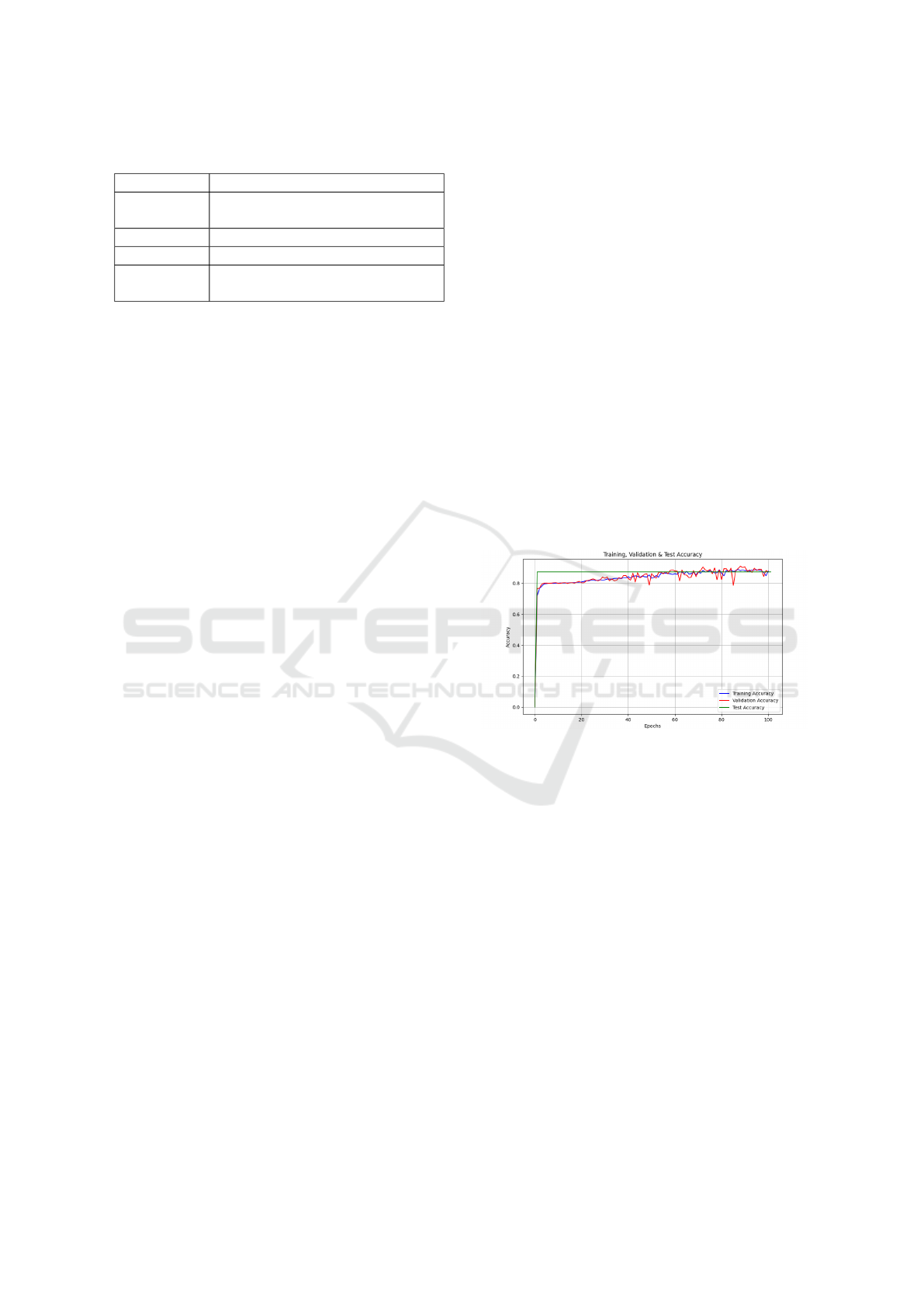
Table 1: Details of each layer.
Layer Type Configuration
GRU 64 units, return sequences, input
shape = (10, n
features
)
GRU 32 units
Dense 64 neurons, ReLU activation
Dense Output layer with 49 neurons, Soft-
max activation
A fully connected dense layer with 64 neurons and
a ReLU activation function was added following the
GRU layers to enhance non-linear feature extraction
before classification. The final output layer was tai-
lored to the multi-class classification task using a soft-
max activation.
The model was implemented in Python using
the TensorFlow/Keras framework. Training was per-
formed using the Adam optimizer, which adaptively
adjusts learning rates to accelerate convergence. Cat-
egorical cross-entropy was employed as the loss func-
tion, suitable for multi-class scenarios. The batch size
was set to 32, considering both empirical performance
and hardware constraints. Training proceeded for a
maximum of 100 epochs.
To promote generalization and prevent overfitting,
an early stopping strategy was applied. In particular,
20% of the training set was reserved as a validation
set, stratified to preserve the class distribution. The
model’s validation loss was monitored during each
epoch, and training was halted if no improvement was
observed for 10 consecutive epochs. This regular-
ization technique effectively reduced overfitting and
improved the model’s ability to generalize to unseen
fault conditions.
Overall, the proposed architecture and training
strategy achieve a compromise between model com-
plexity, classification accuracy, and computational
efficiency, enabling robust detection of fine-grained
fault patterns in short time-series data.
While the current architecture was selected based
on preliminary experiments and literature insights,
a formal ablation study on GRU units, sequence
lengths, and dense layers will be conducted in future
work to assess model sensitivity and optimize perfor-
mance.
5 RESULTS AND
PERFORMANCE EVALUATION
To assess the effectiveness of the proposed GRU-
based diagnostic model, a comprehensive evaluation
was conducted using training history analysis, con-
fusion matrix interpretation, and class-wise classifi-
cation metrics. These analyses provide insights into
the model’s ability to generalize, its robustness across
fault classes, and its performance consistency on un-
seen data.
5.1 Training and Validation Accuracy
The model’s learning behavior throughout the train-
ing process is depicted in Figure 5, which shows the
evolution of training accuracy (blue), validation ac-
curacy (red), and final test accuracy (green). The
training curve exhibits a rapid rise in accuracy during
the early epochs, reaching a plateau at approximately
87.3%, indicating that the model effectively learned
the temporal patterns of the input sequences. The
validation curve closely follows the training curve,
with minimal divergence, suggesting that the model
exhibits low overfitting and strong generalization ca-
pabilities. Notably, the test accuracy—calculated on
a separate held-out dataset—remained consistent at
87.3%, further reinforcing the model’s robustness on
unseen fault scenarios.
Figure 5: Training, Validation, and Test Accuracy Evolution
Over Epochs.
5.2 Confusion Matrix and Class
Performance
The classification outcomes for all 49
classes—comprising 48 distinct fault cases gen-
erated by blocking one of six motors at eight time
steps (0.1 s to 0.8 s), along with one nominal
class—are visualized in Figure 6 via the confusion
matrix. A strong diagonal dominance is observed,
reflecting high precision and recall for most fault
categories. The limited misclassifications that occur
are primarily concentrated between neighboring
time instances within the same joint, which can be
attributed to the natural similarity in system dynam-
ics for temporally adjacent faults. For example, a
blockage introduced at 0.3 s may produce a response
signal closely resembling that of a blockage at 0.4
s for the same joint. Despite these inherent chal-
Fault Diagnosis of Industrial Robots Using a Digital Twin and GRU-Based Deep Learning
491
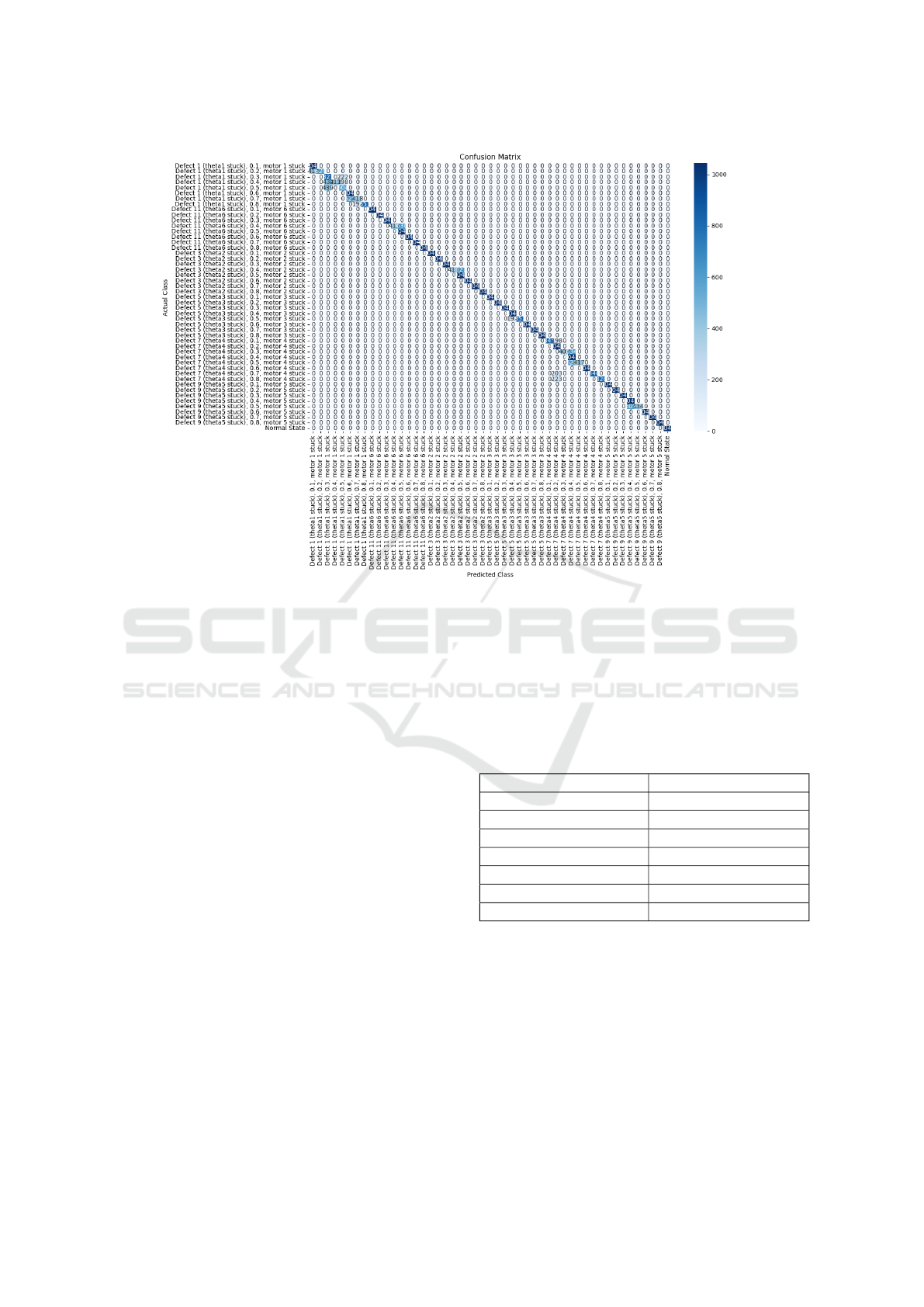
Figure 6: Confusion Matrix of the GRU-Based Fault Classification Model.
lenges, the classifier maintained a high level of class
discrimination, even for closely spaced temporal
faults.
5.3 Classification Metrics
The quantitative evaluation of the model’s predic-
tive performance is summarized in Table 2, which
reports the overall and average classification met-
rics. The model achieved a macro-average F1-score
of 86.85%, indicating balanced performance across
all classes without bias toward more frequent labels.
Precision and recall values exceeded 91% and 87%
respectively in their weighted averages, highlighting
the model’s effectiveness in both correctly identify-
ing fault types and minimizing false negatives. Im-
portantly, the model reached perfect classification for
the nominal (fault-free) class, affirming its capability
to distinguish between healthy and faulty states with
high reliability.
Slightly lower performance was observed in a few
fault classes, notably involving motor 1 and motor 4,
particularly at mid-range fault injection instants (e.g.,
0.4 s or 0.5 s). This degradation is likely due to over-
laps in the fault signatures at these time intervals.
A deeper analysis using attention or saliency maps
could help understand which features contribute most
to confusion in these specific fault classes. Moreover,
data augmentation or multi-modal inputs (e.g., torque
or velocity signals) could improve discriminability.
Nonetheless, the model consistently produced
high-quality predictions and maintained overall accu-
racy at 87.35%, which is considered competitive for
high-resolution multi-class time-series classification.
Table 2: Classification Report.
Metric Value
Accuracy 87.35%
Macro Avg Precision 91.64%
Macro Avg Recall 87.35%
Macro Avg F1-Score 86.85%
Weighted Avg Precision 91.64%
Weighted Avg Recall 87.35%
Weighted Avg F1-Score 86.85%
5.4 Comparison with LSTM Baseline
To contextualize the GRU model’s performance, we
trained a baseline Long Short-Term Memory (LSTM)
model using the same dataset, sequence length, and
preprocessing pipeline. The LSTM model achieved a
higher test accuracy of 90.51%, slightly outperform-
ing the GRU classifier.
Classification metrics—including precision, re-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
492

Figure 7: Confusion Matrix of the LSTM-Based Fault Classification Model.
Figure 8: Training, Validation, and Test Accuracy of the
LSTM Model Across Epochs.
call, and F1-score—were consistently high across
most of the 49 classes, and the model particularly ex-
celled in handling overlapping temporal patterns. The
confusion matrix of the LSTM classifier (Figure 7)
demonstrates strong diagonal dominance, indicating
excellent class separability. In parallel, Figure 8 illus-
trates the evolution of training, validation, and test ac-
curacy over epochs, revealing stable convergence and
effective generalization.
These results highlight that LSTMs, with their so-
phisticated memory mechanisms, offer improved ca-
pacity to capture long-term dependencies in sequen-
tial joint signals. However, despite this marginal gain
in accuracy, GRUs remain advantageous due to their
lower computational complexity and fewer parame-
ters, which make them more suitable for real-time de-
ployment, especially in embedded systems with con-
strained resources.
Overall, the inclusion of this LSTM baseline con-
firms the robustness of recurrent architectures for
robotic fault classification and reinforces the validity
of the GRU-based approach adopted in this study.
These results validate the efficacy of combin-
ing a simulation-based data generation approach with
GRU neural networks for robotic fault classification.
The methodology demonstrates strong potential for
deployment in real-time monitoring systems where
early and accurate fault detection is critical.
6 CONCLUSION
This work presented a hybrid methodology that com-
bines a high-fidelity digital twin with a GRU-based
deep learning architecture for real-time fault diagno-
sis of the St
¨
aubli TX60 industrial robot. The proposed
approach enables the simulation of realistic motor
Fault Diagnosis of Industrial Robots Using a Digital Twin and GRU-Based Deep Learning
493

blockage faults and the generation of large-scale la-
beled datasets under controlled conditions. These
data were used to train a Gated Recurrent Unit (GRU)
classifier capable of recognizing 49 distinct operat-
ing states, including both nominal and faulty behav-
iors. The model achieved high classification accuracy
(87.35%) and strong generalization across multiple
fault scenarios, demonstrating the relevance of tem-
poral features captured through joint trajectories.
The digital twin not only ensured repeatability and
cost-effective experimentation but also allowed for
fine-grained control over fault injection, improving
the quality of diagnostic data. Our findings highlight
the effectiveness of combining physics-based simu-
lation and data-driven learning for complex fault di-
agnosis tasks in robotics. Unlike traditional methods
relying on thresholding or signal modeling, this ap-
proach enables the automatic identification of fault
type, location, and onset timing using only sequential
joint data.
While the current GRU classifier was trained
on isolated motor jamming faults at discrete time
points, this work lays the foundation for future exten-
sions. We acknowledge that compound, cascading,
and evolving faults were not covered, and that fault
realism was limited by predefined injection times.
To enhance generalization, future research will ex-
plore (i) dynamic fault injection mechanisms, (ii)
extended fault types such as sensor degradation or
torque anomalies, and (iii) learning from mixed-fault
conditions.
Additionally, although the digital twin offers con-
trolled and repeatable experimentation, validation
solely in simulation restricts real-world applicability.
We plan to implement hardware-in-the-loop valida-
tion and on-site robotic tests to evaluate robustness
under physical uncertainties and sensor noise.
In terms of learning architecture, beyond re-
current models like GRU and LSTM, we will in-
vestigate more recent temporal models such as
Transformer-based encoders and State-Space Se-
quence Models (SSSM). In particular, the Mamba
architecture—which captures temporal dynamics
through continuous-time formulations inspired by or-
dinary differential equations—presents a promising
direction. Its alignment with the physics-based nature
of robotic systems could enable better interpretability
and improved generalization under varying time res-
olutions.
Overall, this work represents a promising step to-
ward deploying intelligent, real-time fault detection
and predictive maintenance in industrial robotic sys-
tems.
REFERENCES
Boschetti, G. and Sinico, T. (2024). Designing digital
twins of robots using simscape multibody. Robotics,
13(4):62.
Cho, K., Van Merri
¨
enboer, B., Gulcehre, C., Bahdanau, D.,
Bougares, F., Schwenk, H., and Bengio, Y. (2014).
Learning phrase representations using rnn encoder-
decoder for statistical machine translation. arXiv
preprint arXiv:1406.1078.
Grieves, M. (2022). Digital twin: manufacturing excellence
through virtual factory replication. 2014. White Paper.
Hnaien, I. B., Gascard, E., Simeu-Abazi, Z., and Dhouibi,
H. (2024). Methodology of construction of a digital
twin: Application to the st
¨
aubli robot’s arm and shoul-
der. In 2024 IEEE International Conference on Arti-
ficial Intelligence & Green Energy (ICAIGE), pages
1–6. IEEE.
Lee, J., Bagheri, B., and Kao, H.-A. (2015). A cyber-
physical systems architecture for industry 4.0-based
manufacturing systems. Manufacturing letters, 3:18–
23.
Liu, S., Wang, L., and Wang, X. V. (2021). Sensor-
less force estimation for industrial robots using distur-
bance observer and neural learning of friction approx-
imation. Robotics and Computer-Integrated Manufac-
turing, 71:102168.
Sabry, A. H. and Amirulddin, U. A. B. U. (2024). A review
on fault detection and diagnosis of industrial robots
and multi-axis machines. Results in Engineering, page
102397.
She, J., Miyamoto, K., Han, Q.-L., Wu, M., Hashimoto,
H., and Wang, Q.-G. (2022). Generalized-extended-
state-observer and equivalent-input-disturbance meth-
ods for active disturbance rejection: Deep observation
and comparison. IEEE/CAA Journal of Automatica
Sinica, 10(4):957–968.
Yin, S. and Kaynak, O. (2015). Big data for modern indus-
try: challenges and trends [point of view]. Proceed-
ings of the IEEE, 103(2):143–146.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
494
