
Evaluating Use of ARQ Strategies in Communication Protocols for
Search and Rescue
Antonello Calabr
`
o
a
, Eda Marchetti
b
and Maria Teresa Paratore
c
Istituto di Scienza e Tecnologie dell’Informazione “A. Faedo”, CNR, Pisa, Italy
Keywords:
LoRa, SAR, ARQ, Reliability.
Abstract:
Search and Rescue (SAR) operations often occur in remote and challenging environments where conventional
communication infrastructures are unavailable or unreliable. Effective communication is crucial for mission
success. Low-power wide area network (LPWAN) protocols, particularly the LORA (Long Range) protocol,
have gained traction due to their low power consumption and extended range. However, LORA’s low relia-
bility presents significant challenges in the time-sensitive context of SAR operations, necessitating effective
communication strategies. This paper examines the reliability of communication protocols in real scenarios,
focusing on Stop & Wait (S&W) and Selective Repeat (SR) Automatic Repeat reQuest (ARQ) protocols. It
evaluates their suitability by addressing operational constraints such as geographic barriers, time sensitivity,
and simplicity of implementation. Key contributions include investigating the current literature, a real imple-
mentation of the ARQ algorithm, and a comparative analysis of these protocols under real-world conditions.
Furthermore, the study presents a real-world implementation of ARQ mechanisms and evaluates their opera-
tional trade-offs in SAR scenarios, considering both computational constraints and deployment feasibility.
1 INTRODUCTION
In Search and Rescue (SAR) operations, effective
communication is the backbone of successful mis-
sions (Alsaeedy and Chong, 2020). These opera-
tions often occur in remote, hostile, or challenging en-
vironments where traditional communication infras-
tructures, such as cellular networks or satellite com-
munications, are either lacking or unreliable (Calabr
`
o
and Marchetti, 2024). In these conditions, the avail-
ability of robust and streamlined communication pro-
tocols that can operate under these difficult conditions
is a stringent need.
Among the various communication technologies
available, low-power wide area network (LPWAN)
protocols, particularly the LORA (Long Range) pro-
tocol, have gained significant traction due to their
capability to facilitate communication over extensive
distances while consuming minimal power. LORA
protocol is especially valuable in SAR missions,
where team members or equipment may spread across
large areas that are difficult to access. LORA net-
a
https://orcid.org/0000-0001-5502-303X
b
https://orcid.org/0000-0003-4223-8036
c
https://orcid.org/0000-0002-9089-8445
works can support many devices with lower en-
ergy requirements, permitting extended operational
periods without frequent recharging or replacement.
However, despite these advantages, a notable draw-
back of LPWAN protocols like LORA is their inher-
ently low reliability. Given the time-sensitive nature
of SAR operations, failures in communication can
have critical implications. Consequently, maintain-
ing data integrity and ensuring timely transmissions is
extremely critical. Numerous strategies have been ex-
plored in the existing literature to enhance the reliabil-
ity of communications in SAR contexts (Mendelsohn
et al., 2024; Mabulu et al., 2024; Akgun et al., 2023),
such as multi-hop communication (Anuradha et al.,
2022) and Automatic Repeat reQuest (ARQ) (Vasiliev
and Abilov, 2015).
Each method possesses distinct advantages and
disadvantages that are particularly relevant to the
unique contexts in which SAR operations are con-
ducted. Specifically, multi-hop communication
strategies focus on relaying data through intermediate
nodes to extend the transmission range and enhance
connectivity. This approach can significantly bolster
communication in scenarios where geographical fea-
tures, such as mountains or dense forest,s hinder di-
rect transmission. However, this method often relies
Calabrò, A., Marchetti, E. and Paratore, M. T.
Evaluating Use of ARQ Strategies in Communication Protocols for Search and Rescue.
DOI: 10.5220/0013704800003985
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Web Information Systems and Technologies (WEBIST 2025), pages 59-70
ISBN: 978-989-758-772-6; ISSN: 2184-3252
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
59

on having a certain level of infrastructure in place,
such as additional communication nodes or devices.
In SAR operations, this infrastructure may not always
be available, potentially limiting the effectiveness of
multi-hop communication. The Automatic Repeat re-
Quest mechanisms provide a systematic approach to
retransmitting lost or erroneous packets, thereby im-
proving the reliability of data communication. Differ-
ent ARQ protocols (YOSHIMOTO et al., 1991), such
as Go-Back-N, Selective Repeat, and Stop & Wait,
can be used to identify and recover transmission er-
rors efficiently. However, ARQ can introduce addi-
tional latency into the communication process. In a
SAR context, where timely updates are crucial, this
latency may not be the most efficient solution, espe-
cially in simpler, single-core systems where the over-
head of managing ARQ may outweigh its benefits.
This paper aims to investigate these enforcements
on communication, focusing on the peculiarities of
ARQ. In particular, the paper focuses on the hypoth-
esis that the benefits of the Selective Repeat (SR)
ARQ protocol are often limited, resulting in perfor-
mance that may be functionally similar to Stop and
Wait (S&W) in many situations. Therefore, we will
evaluate its cost-effectiveness in SAR environments
through several key analyses, including:
• Investigation of current literature: We provide an
overview of the current methodologies in pro-
tocol reliability to classify their challenges and
limitations. This will assist in identifying opti-
mal guidelines for applying these communication
strategies in SAR operations.
• Implementation of the algorithms: We will de-
tail the design and application of various algo-
rithms specifically tailored for simplistic systems.
These algorithms aim to optimize transmission
times without significantly increasing complexity
or cost.
• Comparative performance analysis: we will
showcase the comparative analysis of the imple-
mented transmission improvement algorithms un-
der real-world conditions to ascertain their effec-
tiveness.
Therefore, the paper wants to provide a realistic
investigation of the operational constraints inherent
in SAR missions, providing valuable data to support
informed decision-making when selecting communi-
cation strategies. In our exploration, we will provide
essential components to support our findings, includ-
ing a detailed description of i) the hardware configura-
tions and technical specifications, ii) the execution en-
vironment, including actors such as geographic loca-
tion, terrain characteristics, and environmental chal-
lenges that could impact possible SAR operations; iii)
the data packets, including their structures and spe-
cific transmission requirements.
This will allow for possible experiment replica-
tion with different protocols and conditions. Through
this extensive exploration, we aim to contribute valu-
able knowledge that could enhance the communi-
cation strategies employed in SAR operations. By
advancing our understanding of ARQ protocols and
their alternatives, we ultimately seek to improve the
efficacy and safety of these critical missions, ensur-
ing that personnel can communicate effectively and
respond swiftly to emergencies.
Although Go-Back-N ARQ is widely studied, this
work focuses on Stop & Wait and Selective Repeat
due to their lower computational requirements and
suitability for low-power devices, which are more
aligned with SAR operation constraints.
Roadmap. The remainder of this article is orga-
nized as follows. The main background and related
works are presented in Section 2, while the proposed
architectural design and its reference behavior are de-
scribed in Section 3. The Selective Repeat ARQ im-
plementation and the system deployed for its execu-
tion are presented in Section 4. Furthermore, in Sec-
tion 5, the experimental results are evaluated and dis-
cussed. Finally, in Section 7, conclusions and possi-
ble future works are highlighted.
2 BACKGROUND AND RELATED
WORK
This section reports the current research activity in
optimizing LoRa communications and the required
background knowledge in Section 2.2 and 2.1, respec-
tively.
2.1 State-of-the-Art
Optimization of LoRa communications has stimu-
lated different research field solutions (Hilmani et al.,
2022; Kamal et al., 2023). Most proposed solutions
use intermediate nodes (end devices or gateways) to
expand the network coverage (Bor et al., 2016). The
intermediate nodes forward data until they reach a fi-
nal gateway according to specific routing protocols
(Jouhari et al., 2023; Leonardi et al., 2023; Lundell
et al., 2018; Paredes et al., 2023) that can take into
consideration also quality parameters such as usage,
remaining battery life, and traffic rate (Anedda et al.,
2018; Wong et al., 2024; Islam et al., 2023; Ebi et al.,
2019; Zhao et al., 2023).
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
60

In (Zorbas et al., 2021), the authors tackle the
problem of scheduling the retransmission of buffered
data in LoRa networks, typical of the situations in
which connectivity between gateways is not available,
and propose a time-slotted transmission scheduling
mechanism. It is also highlighted that synchronous
communications positively affect data collection time
and network performance. In (Chen et al., 2019),
the authors present a cost-effective hardware archi-
tecture for a LoRa gateway that increases through-
put by improving bandwidth usage. Other solutions
adopt organization algorithms of the nodes to spe-
cific topology (Haubro et al., 2020; Leenders et al.,
2023; Gkotsiopoulos et al., 2021) or cluster (Cotrim
and Kleinschmidt, 2020; Sun et al., 2022; Almuhaya
et al., 2022; Mamour and Congduc, 2019) to ensure
reliable data transfer to the target gateway (Dwijak-
sara et al., 2019; Wong et al., 2024; Bomgni et al.,
2023).
A machine learning (ML) approach is used
in (Abubakar et al., 2022), proposing a scalability op-
timization for LoRaWAN networks based on a com-
bination of ML algorithms. The authors identify the
average distance between LoRa end-devices and gate-
ways as a function to be minimized with the constraint
of improving the received signal strength (RSSI) at
each end-device, then solve this optimization problem
by combining K-Means clustering (to optimize gate-
ways’ locations) and Regression Neural Networks (to
maximize RSSIs). Furthermore, they perform a se-
ries of trials to form the foundation for developing an
adaptive algorithm capable of dynamically allocating
bandwidth autonomously.
Finally, hybrid solutions exist, which rely on mes-
sage transmission and synchronization techniques to
reduce energy consumption while improving cover-
age and dependability at the same time (Zhou et al.,
2019; Tanjung et al., 2020).
2.2 LoRa Communication and ARQ
This section details the two main baseline concepts
used in this paper: LoRa communication and Auto-
matic Repeat Request (ARQ).
LoRa Communication. LoRa is a wireless commu-
nication technology designed for long-range, low-
power applications conceived by Cyleo (Greno-
ble) in 2009 and released in January 2015 (Sornin
et al., 2015). It is based on the Chirp Spread
Spectrum (CSS), which allows maintaining com-
munications over several kilometers, making it
an ideal solution for scalable applications such
as the Internet of Things (IoT) (Grunwald et al.,
2019), smart cities, digital agriculture (Codeluppi
et al., 2020), environmental monitoring (Fraga-
Lamas et al., 2019), and asset tracking. One of
the main advantages of LoRa is its ability to pro-
vide deep indoor penetration and connectivity in
challenging environments, such as urban areas or
buildings with thick walls, where traditional wire-
less technologies may struggle to maintain reli-
able communication. In addition, LoRa supports
bi-directional communications, which means that
devices can transmit data and receive commands
or updates from a central server or gateway.
Automatic Repeat Request. Automatic Repeat Re-
quest (ARQ) (Lin et al., 1984) is an error-control
strategy used in data communications to ensure
reliable information delivery over unreliable or
error-prone transmission channels. It includes
mechanisms for checking errors on received data,
such as timeouts and feedback signals (acknowl-
edgments), to handle the re-transmission of er-
roneous or missing data segments. There are
several ARQ protocols described in the litera-
ture (Makridis et al., 2022; Kalør et al., 2022;
Choi et al., 2020), including
• Stop-and-Wait ARQ, which is based on the ac-
knowledgment of reception for one segment of
data before sending the next segment
• Go-Back-N ARQ, which allows the transition
of multiple data segments without waiting for
individual acknowledgments and
• Selective Repeat ARQ, which allows the indi-
vidual acknowledgment of each received seg-
ment and provides for re-transmission only in
the event of segments with errors.
Table 1 summarizes the main features of the
three ARQ protocols according to the literature
overview(Makridis et al., 2022; Kalør et al., 2022;
Choi et al., 2020). The table’s purpose is to high-
light each protocol’s strengths and weaknesses so
that easy implementation decisions can be made
and to assist in identifying optimal guidelines for
applying these communication strategies in SAR
operations.
While Go-Back-N represents a moderate trade-off
between complexity and performance, its requirement
for retransmission of multiple frames upon a single er-
ror is suboptimal in SAR contexts with high energy
constraints. Our implementation instead prioritizes
resource efficiency and simplicity, aligning with the
limitations of real SAR equipment. Considering the
current state of the art, a contribution of the paper
is a comparative analysis of these algorithms under
real-world conditions to confirm the overall analysis
Evaluating Use of ARQ Strategies in Communication Protocols for Search and Rescue
61
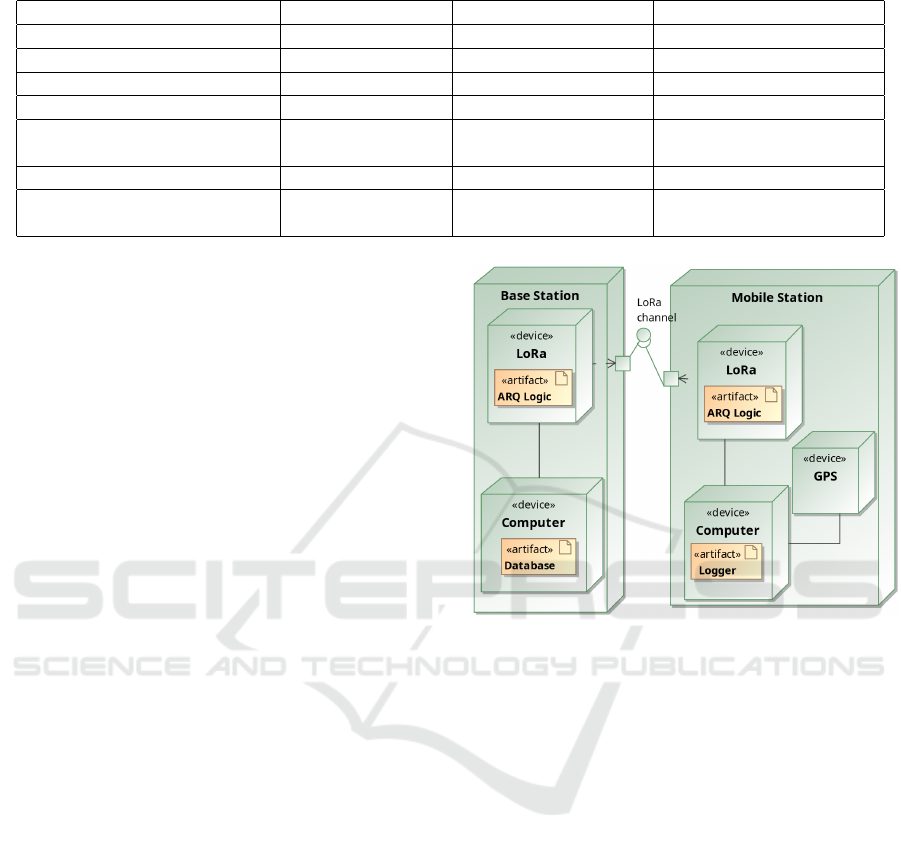
Table 1: Main features of the three ARQ strategies.
Stop and Wait Go-Back-N Selective Repeat
Channel Utilization Poor Better than SW Best among the 3
Implementation Complexity Simple Moderate Most complex
Memory Requirements Low Moderate High
Bandwidth Efficiency Low Moderate High
Error Handling
Retransmit
current packet
Retransmit all packets
from error point
Retransmit only
erroneous packets
Packet Reordering Not needed Not needed Required at receiver
Error Recovery Time Fast but inefficient
Can be slow due to
mass retransmission
Efficient, only retransmits
needed packets
provided in Table1 and ascertain their practical limi-
tation and effectiveness. For this, we first focused our
attention on the Selective Repeat and Stop&Wait al-
gorithm since these strategies proved to be better per-
forming than others (such as the single-hop method
used by LoRaWAN (Choi et al., 2020)) in improving
reliability across LoRa networks (Choi et al., 2020;
Abedina et al., 2023). Eventually, we adopted the Se-
lective Repeat ARQ protocol, as it is the most suit-
able for increasing data transmission’s reliability and
robustness, ensuring data integrity while minimizing
retransmissions and energy consumption.
3 ARCHITECTURAL DESIGN
This section describes the architecture for imple-
menting Selective Repeat (SR) and the Stop & Wait
(S&W) ARQ protocols. Figure 1 illustrates the base-
line main components of the instantiated system (i.e.,
the Mobile Station and the Base Station) connected
through a LoRa channel. The Base Station remains
fixed in position, enhancing the signal reception and
the overall spatial coverage. It is responsible for man-
aging the activities done by the receiver of the two
ARQ protocols in practical scenarios when the trans-
mitter device moves in a natural environment.
As shown in Figure 1, both the Base Station and
Mobile Station infrastructures include computational
devices (Computer) for data storage and management
operations. In particular, the Base Station includes
a database, while the Mobile Station relies on a log-
ger for the storage activities. Base Station and Mobile
Station communicates through a LoRa channel. The
Mobile Station and Base Station include a LoRa node
with an ARQ Logic artifact for implementing the ARQ
strategy (SR or S&W). Finally, the Mobile Station in-
cludes a GPS device for gathering the position of the
Mobile Station. More details of Mobile Station and
Base Station implementation are provided in the next
section.
Figure 1: Architectural overview.
4 PROTOTYPE
IMPLEMENTATION
This section presents an instance of the architecture
depicted previously. In particular, details of the two
components, Base Station, and Mobile Station, are
provided in Section 4.1 and 4.2.In comparison, the
details related to the implementation of the ARQ pro-
tocol are provided in Section 4.3.
4.1 Base Station
Figure 2 shows the instantiation of the Base Sta-
tion presented in Figure 1. In realizing the Base
Station devices, the following have been selected:
A barebone computer for the Computer component.
As in Figure 2, Barebone is in charge of manag-
ing the storage of the data collected during the ex-
ecution. The Barebone device executes two arti-
facts: MySQL, which is an instance of the popular
open-source DB, where the SerialManager stores the
data gathered by the transmission received through
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
62
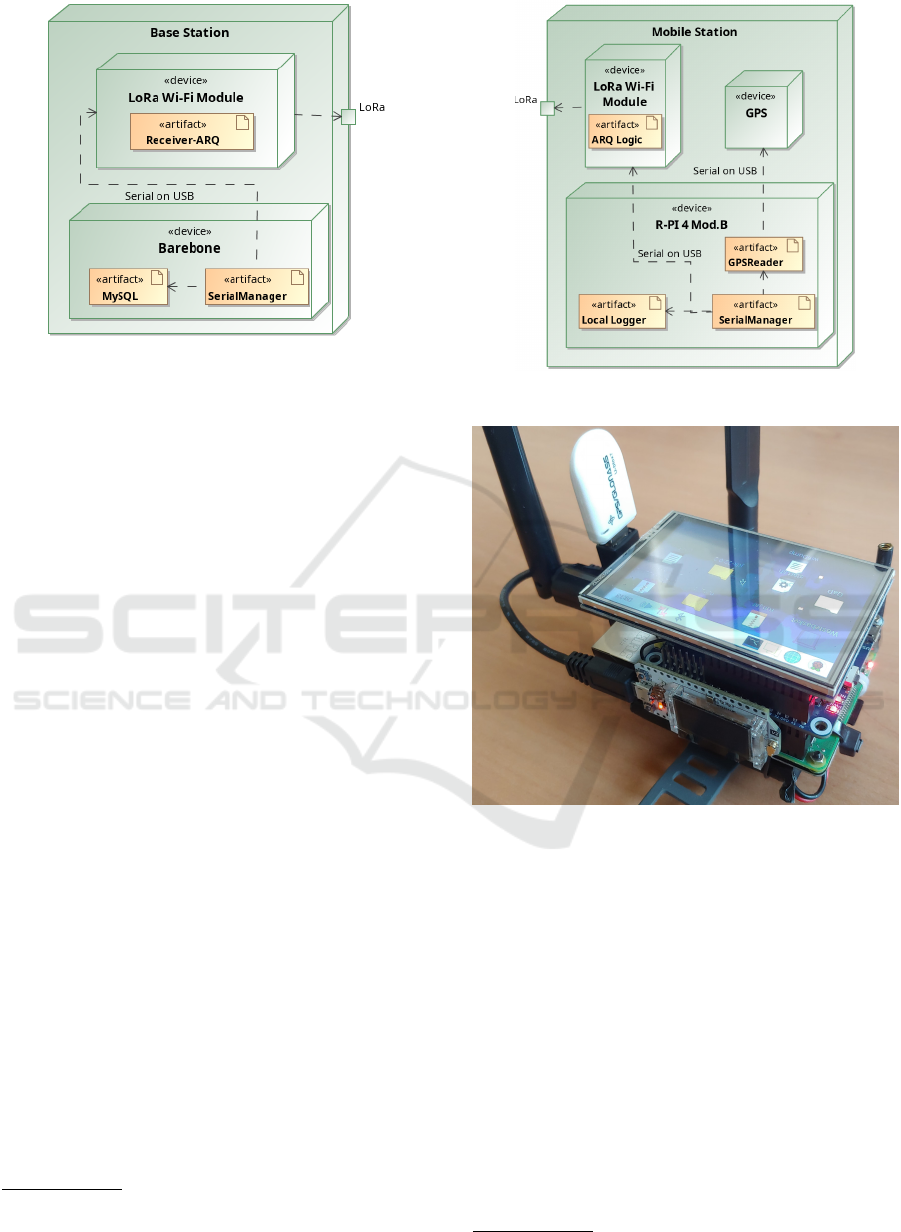
Figure 2: Base Station Architecture.
the LoRa Wi-Fi module. The SerialManager arti-
fact has been developed using Java code. The Bare-
bone device is connected to the LoRa Wi-Fi module
through a USB port that emulates a serial port. The
LoRa Wi-Fi module manages the transmission using
the LoRa radio protocol. In particular, the Receiver-
ARQ artifact is the component developed on top of
the LoRa Wi-Fi Module for executing the ARQ pro-
tocol (i.e., Selective Repeat or Stop & Wait). In the
proposed implementation, the Barebone device is re-
alized through a Lenovo ThinkEdge SE10 running
Windows 10 IoT Enterprise; the LoRa Wi-Fi Module
is built by means of a LilyGo LoRa32 V2.1 device
equipped with an ESP32 and an SX1262 LoRa node
chip. The Receiver-ARQ software has been developed
using Arduino IDE
1
, and LilyGo libraries
2
. The pro-
totype is shown in Figure 5.
4.2 Mobile Station
Figure 3 details the instantiation of the architecture
of Mobile Station. It is composed of three different
devices:
• a Raspberry PI Model 4B (R-PI 4 Mod.B) that rep-
resents the instantiation of the Computer shown in
Figure 1;
• a LoRa Wi-Fi Module, connected using a USB
port that emulates a serial port to the R-PI 4
Mod.B;
• and a GPS device connected using another USB
port of the R-PI 4 Mod.B.
On the R-PI 4 Mod.B device, three artifacts have
been deployed: the Java-developed SerialManager
1
https://www.arduino.cc/en/software
2
https://github.com/Xinyuan-LilyGo/
TTGO-LoRa-Series
Figure 3: Mobile Station Architecture.
Figure 4: Mobile Station.
artifact for sending and receiving data from the LoRa
Wi-Fi module related to communication packets and
the GPS device from which it receives the current
GPS position. These data are stored locally by the
LocalLogger artifact. Also, in this case, the Receiver-
ARQ artifact is the component developed on top of the
LoRa Wi-Fi Module for executing the ARQ protocol
(i.e., Selective Repeat or Stop and Wait).
In the proposed implementation, the R-PI 4 Mod.B
device is realized by a Raspberry Pi 4 Model B de-
vice with 8GB of RAM, on which a 3.5-inch touch-
screen display for debugging and management pur-
poses has been connected. It is powered by a bat-
tery shield PiSugar 5000mah
3
. The LoRa Wi-Fi Mod-
ule has been instantiated using a Heltec WiFi LoRa
3
https://www.pisugar.com/
Evaluating Use of ARQ Strategies in Communication Protocols for Search and Rescue
63

Figure 5: Base Station.
32(V3) device equipped with an ESP32-S3FN8 and
an SX1262 LoRa node chip powered directly by a
USB port of the R-PI 4 Mod.B node. The GPS device
is a generic GPS USB dongle capable of providing
data according to the GPS & GLONASS standard on
a serial port.
The software for running the SerialManager and
the GPSReader artifacts has been developed using
Java, while the ARQ Logic software has been devel-
oped using Arduino IDE. The LocalLogger artifact
has been developed using a Python script for storing
data gathered by the SerialManager. The prototype
of the Mobile Station is shown in Figure 4.
4.3 Implementation of ARQ Methods
As discussed in Section 2.2, the standard LoRa proto-
col suffers from a high packet loss rate, which causes
low transmission reliability. The ARQ methods have
been implemented to address and mitigate this issue,
enhance transmission, and recover any missing pack-
ets. In the current implementation, the ARQ protocols
are implemented both on the Mobile station (i.e., the
transmitter) and on the Base Station (i.e., the receiver)
to enable re-transmission each time a missing packet
is detected. The ARQ logic was implemented from
scratch in Arduino IDE using low-level control struc-
tures, without relying on pre-existing ARQ libraries.
This allowed full customization for constrained envi-
ronments and provided valuable insights into practical
limitations during integration and tuning.
Figure 6 shows the enhanced packet structure used
for communicating the GPS position on which the
Mobile station is located to the Base station. The
packet structure has been developed to incorporate the
ARQ mechanism and include an integrity check of the
data. As depicted in Figure 6, it includes:
• Two bytes to identify the transmitting node;
• Two checksum bytes to control packet integrity;
• Two bytes to determine the role of the transmitter,
i.e., the Base Station or the Mobile Station accord-
ing to the “master” or “slave” protocol.
• Two chars, one at the beginning and one at the
end, to clearly define the packet’s start and end.
Implementing the ARQ mechanism requires iden-
tifying the sender and receiver because data transfer
can occur simultaneously in two directions, generat-
ing packet loss, errors, and collisions. Additionally,
the implementation requires a mechanism for check-
ing transmission errors to improve the reliability of
the data received. Finally, information regarding the
order of the sent packets is necessary to reconstruct
the transmitted data.
Due to the computational limitation of the em-
ployed LoRa devices, it is possible to execute only a
single process with a main ”loop” cycle on which both
send and receive operations must be executed. To
enhance transmission quality, LoRa devices are pro-
grammed to have their main cycle in listening mode
for incoming messages. Transitioning to transmit
mode happens only when a new message is queued
in the buffer, and the system is not busy receiving a
message. This approach reduces reception errors by
ensuring the receiver is always ready to process data
while minimizing packet collisions by prioritizing in-
coming signals over outgoing transmissions.
An optimal interleave time of approximately 1000
ms has been calculated, balancing message schedul-
ing to improve throughput and reduce interference,
particularly in dense IoT networks. This mechanism
forms the foundation for implementing Stop & Wait
and Selective Repeat ARQ protocols, which enhance
reliability by enabling acknowledgment and retrans-
mission of lost or corrupted packets. The selective
repeat mechanism benefits from the receiver’s contin-
uous mode by ensuring efficient reordering and error
recovery without compromising transmission quality.
5 SHOWCASE SCENARIOS
The experiments have been executed in a specific
showcase scenario to provide a comparative perfor-
mance analysis of the ARQ mechanism in an actual
situation. In particular, experimental data have been
collected around the omissis research campus in omis-
sis (see Figure 7). Even if the location is not the typi-
cal environment of a SAR operation, the topology in-
cludes green areas, buildings, areas with a density of
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
64

Figure 6: Structure of the enhanced packet with ARQ features.
Figure 7: Scenario’s path to execute.
different signals, and rooms and buildings with signal
shielding for research purposes.
In Figure 8, it is possible to identify the LoRa an-
tenna placed at the bottom left of the figure. The path
selected for the experiments has a radius of 150m
(light yellow line in Figure 7), and the antenna has
been placed in the building’s roof corner to increase
transmission difficulties (red spot in Figure 7).
The experiment has been executed in favorable
weather conditions without rain or fog to prevent sig-
nal attenuation. The device shown in Figure 4 has
been placed on a bike that travels across the path at an
average speed of around 10 Km/h.
The scope of the experiments was to determine
the quality of the received signals and the number
of packets correctly delivered as the communication
distance between two nodes varies. The transmitter
sends the detected GPS position to the receiver at a
constant frequency ( 1000ms).
Three instances of the experiments have been ex-
ecuted:
1. The path has been crossed without any retransmis-
sion mechanism: see Figure 8 (NO-ARQ);
2. the path has been crossed enabling Stop & Wait
ARQ mechanism: see Figure 9 (S&W-ARQ);
3. the path has been crossed, enabling the Selec-
tive Repeat ARQ mechanism: see Figure 10 (SR-
ARQ).
In all three experiments, the path has been crossed,
moving in the direction of the arrows in the figures.
Additionally, in all the figures, the parts of the path
colored in green represent the messages correctly sent
from the transmitter and received by the LoRa An-
tenna without relying on requiring a retransmission
mechanism (if enabled). Notably, consistent message
loss in specific areas corresponds to known shadow
zones caused by building structures and vegetation
density, which impede line-of-sight (LOS) transmis-
sion and are typical challenges in SAR deployments.
In all three experiments, the data (transmitted and
received) were stored locally on the database instance
of the Base Station and Mobile Station. For evaluating
the packet loss rate, the following formula has been
considered:
PacketLossRate = 1 −
N
rx
N
tx
(1)
where N
rx
and N
tx
are the total number of received
and transmitted packets, respectively.
6 EXPERIMENT EXECUTION
In this section, details about the execution of the three
experiments are provided. Each experiment lasted ap-
proximately 15 minutes, with the mobile station con-
tinuously transmitting GPS packets every 1 second.
All trials were repeated under similar conditions to
ensure consistency in results.
Evaluating Use of ARQ Strategies in Communication Protocols for Search and Rescue
65
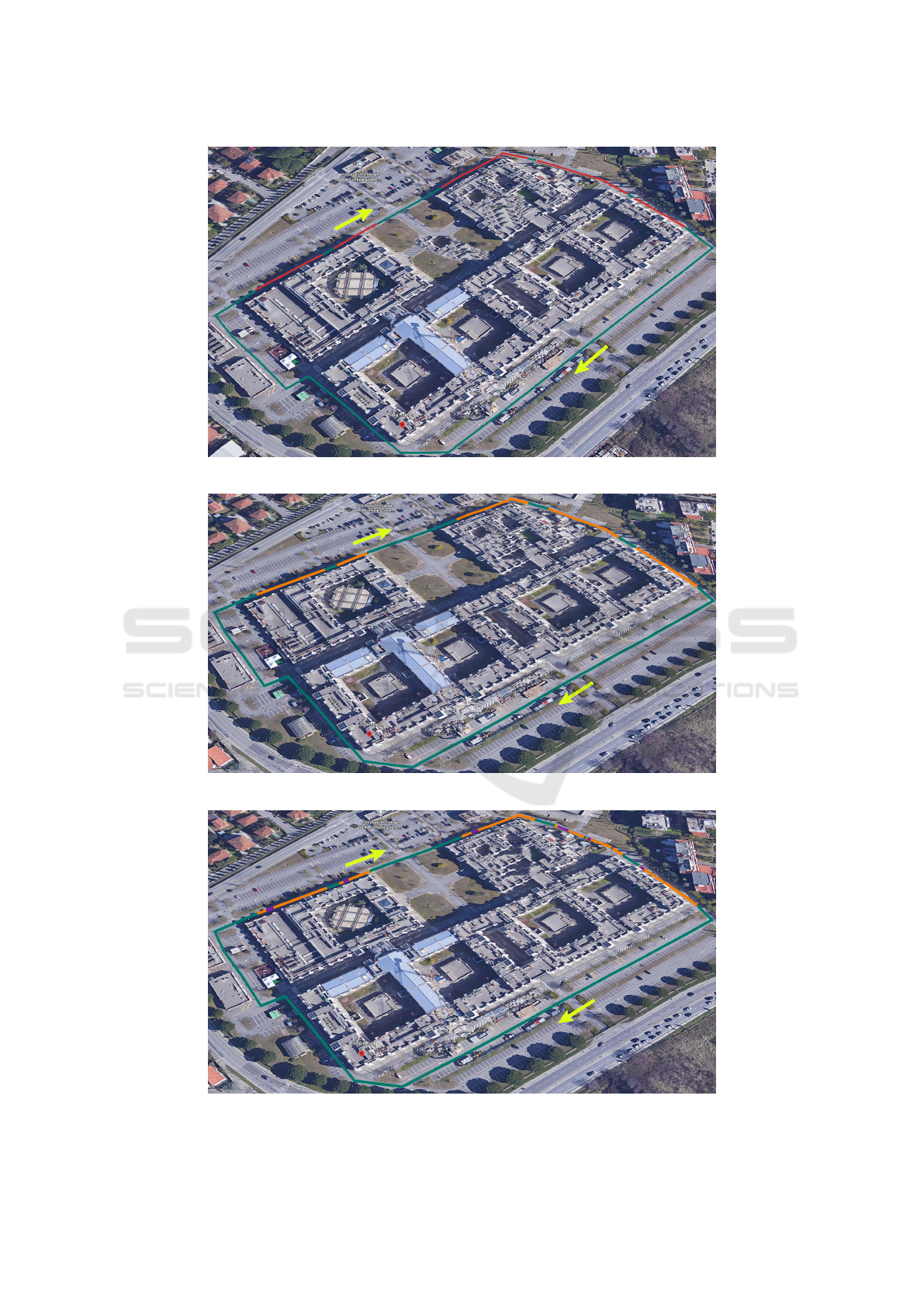
Figure 8: TX-RX data without ARQ.
Figure 9: TX-RX data with Stop & Wait ARQ.
Figure 10: TX-RX data with Selective Repeat ARQ.
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
66

In this regard, the use of color-coded geographic
maps was intentionally preferred over numeric tables
to visually highlight the spatial impact of packet loss
concerning the surrounding environment—an essen-
tial factor in SAR contexts. Rather than proposing a
theoretical model, we focused on experimental val-
idation, emphasizing computational limitations, im-
plementation simplicity, and the realistic effective-
ness of the protocols. Therefore, metrics such as en-
ergy consumption or theoretical delay were deliber-
ately not explored in depth, in favor of producing re-
sults that are easily replicable in practical scenarios.
Execution with NO-ARQ Enabled. The results of
the execution of the first experiment are depicted in
Figure 8. As shown, the part of the path colored in red
identifies the areas where the antenna has received no
messages.
A post-analysis of the data collected during the
first experiment by the Base Station and the Mobile
Station allows the computation of the packet loss rate
in the executed path. In particular, the derived data
were as follows:
• #packets generated by the Mobile Station = 3148;
• #packets received by the Base Station = 1287.
Consequently, the packet loss rate is:
PacketLossRate = 1 −
1287
3148
= 59, 11% (2)
Execution with S&W-ARQ Enabled. The execu-
tion of the second experiment is depicted in Figure 9.
As in the figure, the part of the path colored in orange
identifies the areas where the antenna has received
messages after retransmission, while the Mobile Sta-
tion comes back in LOS (green part of the path). The
part colored in green represents the situation that did
not require a retransmission mechanism.
The packet delivery has been guaranteed using the
ARQ mechanism, and the results of the second exper-
iment provide a 100% delivery rate.
• #packets generated by the Mobile Station = 3291;
• #packets received by the Base Station = 3291.
The computed packet loss rate is:
PacketLossRate = 1 −
3291
3291
= 0% (3)
Execution with SR-ARQ Enabled. The execution
of the third experiment is depicted in Figure 10. As in
the previous experiment, in the figure, the part of the
path colored in orange identifies the areas where the
antenna has received messages after retransmission.
Figure 11: Segment of the SR-ARQ execution with packet
receiving order.
The parts colored in purple identify the areas where
Selective Repeat has an effect, causing the messages
in the purple set to be received before those of the
previous orange segment.
To clarify, Figure 11 shows a segment of the ex-
ecuted path. The order of sent messages was recon-
structed after the data analysis. As depicted in the
figure, when the Mobile Station reached the marked
position in the green segment, the Base Station re-
ceived in order first the messages of the purple seg-
ment numbered 1, then the messages of the orange
segment numbered 2 and finally the messages of the
orange segment numbered 3. The number of packets
generated by the Mobile Station was 3364, with all
successfully received by the Base Station, resulting in
a packet loss rate of 0%. However, transmission order
required post-processing due to reordering inherent to
SR-ARQ.
Experiment Evaluation. Analyzing the data gath-
ered during the experiment, several key insights can
be drawn regarding selecting an appropriate ARQ
protocol, as summarized in Table 1.
1. Channel Utilization and Memory
Requirements: Selective Repeat necessi-
tates buffering out-of-order packets at both the
sender and receiver, alongside additional mech-
anisms for managing cumulative ACKs. The
simpler Stop & Wait protocol may suit systems
with limited computational resources or memory.
2. Bandwidth Efficiency and Energy
Consumption: In scenarios where minimiz-
ing energy consumption is crucial, such as LoRa
transmissions, the overhead associated with
managing the sliding window in Selective Repeat
may outweigh its benefits, making Stop & Wait a
more efficient choice.
3. Packet Size and Buffer Limitations:
Given the constrained buffer resources available
on LoRa low-power devices, Selective Repeat
demands substantial computational power to
Evaluating Use of ARQ Strategies in Communication Protocols for Search and Rescue
67

manage retransmissions and maintain packet
order, particularly in environments with frequent
packet errors. In such contexts, the straight-
forward Stop-and-Wait protocol offers a more
feasible solution due to its simplicity.
7 DISCUSSION AND
CONCLUSION
The paper discussed the crucial role of effective com-
munication in Search and Rescue (SAR) operations,
particularly in challenging environments where tradi-
tional communication methods are often unreliable.
It highlighted the advantages of low-power wide area
network (LPWAN) protocols, specifically the LoRa
protocol, which allows for long-range communication
with minimal power consumption, making it suitable
for SAR missions where resources are limited.
The paper aimed to investigate the effectiveness
and cost-efficiency of these communication strategies
in SAR environments, particularly focusing on the Se-
lective Repeat ARQ protocol. It included an overview
of the literature about current methodologies, the im-
plementation of tailored algorithms for simpler sys-
tems, and a comparative performance analysis of
these algorithms in real-world scenarios. In partic-
ular, the paper evaluated the performance and cost-
effectiveness of ARQ protocols that can be applied
in the context of Search and Rescue (SAR), focusing
mainly on Stop and Wait (S&W) and Selective Re-
peat (SR). The ultimate goal was to provide valuable
insights and guidelines for selecting optimal commu-
nication strategies in SAR missions, addressing the
operational constraints these missions face.
The analysis revealed that while SR offers theoret-
ical advantages in managing lost packets and reducing
latency, these benefits are largely negated in scenar-
ios involving small packets, low latency requirements,
and frequent messages, as demonstrated through the
showcased scenario. In such cases, the higher imple-
mentation costs and complexity of SR are not justi-
fied, as S&W achieves comparable performance with
significantly lower resource demands. Implementing
tailored algorithms and conducting comparative per-
formance analyses under real-world conditions, we
provided actionable insights into the practical appli-
cation of LoRa for small packets and frequent mes-
sage transmission. These findings highlight the im-
portance of context-specific communication strate-
gies that strike a balance between reliability and sim-
plicity, particularly in resource-constrained and time-
sensitive operations.
Furthermore, the system architecture was inten-
tionally kept minimal (point-to-point) to reflect the
real operational limits typical of SAR missions, where
complex infrastructures or multi-hop networks are of-
ten unavailable. However, we acknowledge that ex-
ploring scalability in broader contexts would be valu-
able and is considered a direction for future work.
While the article does not include a direct compar-
ison with alternative technologies (e.g., Wi-Fi mesh,
LTE, BLE), the choice of LoRa is motivated by its fa-
vorable characteristics for SAR missions: low energy
consumption, long-range coverage, and suitability for
remote environments.
This study is a foundation for decision-making in
choosing communication protocols for SAR scenar-
ios, enhancing effective and dependable communica-
tion while reducing operational costs and complex-
ity. While the study’s analysis is mostly qualitative, it
highlights practical deployment trade-offs that are of-
ten overlooked in more theoretical evaluations. These
insights are valuable for practitioners facing real SAR
mission constraints. Future work may explore hybrid
approaches or further optimization of S&W by tun-
ing parameters such as the Spreading Factor or other
transmission settings to enhance performance across
more diverse SAR environments.
ACKNOWLEDGEMENTS
This work is supported by RESTART (PE00000001)
under the PNRR of the Italian MUR program
NextGenerationEU.
REFERENCES
Abedina, T., Yawa, C. T., Koha, S. P., Hannanc, M., and
Kiong, S. (2023). The energy-efficient control solu-
tions of smart street lighting systems: A review, is-
sues, and recommendations. Engineering and Tech-
nology Journal, 41(8):1–24.
Abubakar, A. K., Shore, T., and Sastry, N. R. (2022). Con-
strained machine learning for lora gateway location
optimisation. Proceedings of the 17th Asian Internet
Engineering Conference.
Akgun, S. A., Ghafurian, M., Crowley, M., and Dauten-
hahn, K. (2023). Using affect as a communication
modality to improve human-robot communication in
robot-assisted search and rescue scenarios. IEEE
Trans. Affect. Comput., 14(4):3013–3030.
Almuhaya, M. A., Jabbar, W. A., Sulaiman, N., and Abdul-
malek, S. (2022). A survey on lorawan technology:
Recent trends, opportunities, simulation tools and fu-
ture directions. Electronics, 11(1):164.
Alsaeedy, A. A. R. and Chong, E. K. P. (2020). 5g and
uavs for mission-critical communications: Swift net-
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
68

work recovery for search-and-rescue operations. Mob.
Networks Appl., 25(5):2063–2081.
Anedda, M., Desogus, C., Murroni, M., Giusto, D. D., and
Muntean, G.-M. (2018). An energy-efficient solution
for multi-hop communications in low power wide area
networks. In 2018 IEEE International Symposium
on Broadband Multimedia Systems and Broadcasting
(BMSB), pages 1–5. IEEE.
Anuradha, D., Subramani, N., Khalaf, O. I., Alotaibi, Y.,
Alghamdi, S., and Rajagopal, M. (2022). Chaotic
search-and-rescue-optimization-based multi-hop data
transmission protocol for underwater wireless sensor
networks. Sensors, 22(8).
Bomgni, A. B., Ali, H. M., Shuaib, M., Mtopi Chebu, Y.,
et al. (2023). Multihop uplink communication ap-
proach based on layer clustering in lora networks for
emerging iot applications. Mobile Information Sys-
tems, 2023.
Bor, M. C., Vidler, J., and Roedig, U. (2016). Lora for the
internet of things. In Ewsn, volume 16, pages 361–
366.
Calabr
`
o, A. and Marchetti, E. (2024). Transponder: Support
for localizing distressed people through a flying drone
network. Drones, 8(9):465.
Chen, J. J., Liu, V., and Caelli, W. J. (2019). An adaptive
and autonomous lora gateway for throughput optimi-
sation. Proceedings of the Australasian Computer Sci-
ence Week Multiconference.
Choi, R., Lee, S., and Lee, S. (2020). Reliability improve-
ment of lora with arq and relay node. Symmetry,
12(4):552.
Codeluppi, G., Cilfone, A., Davoli, L., and Ferrari, G.
(2020). Lorafarm: A lorawan-based smart farming
modular iot architecture. Sensors, 20(7):2028.
Cotrim, J. R. and Kleinschmidt, J. H. (2020). Lorawan
mesh networks: A review and classification of mul-
tihop communication. Sensors, 20(15):4273.
Dwijaksara, M. H., Jeon, W. S., and Jeong, D. G. (2019).
Multihop gateway-to-gateway communication proto-
col for lora networks. In 2019 IEEE International
Conference on Industrial Technology (ICIT), pages
949–954. IEEE.
Ebi, C., Schaltegger, F., R
¨
ust, A., and Blumensaat, F.
(2019). Synchronous lora mesh network to monitor
processes in underground infrastructure. IEEE access,
7:57663–57677.
Fraga-Lamas, P., Celaya-Echarri, M., L
´
opez-Iturri, P.,
Castedo, L., Azpilicueta, L., Aguirre, E., Su
´
arez-
Albela, M., Falcone, F., and Fern
´
andez-Caram
´
es,
T. M. (2019). Design and experimental validation
of a lorawan fog computing based architecture for
iot enabled smart campus applications. Sensors,
19(15):3287.
Gkotsiopoulos, P., Zorbas, D., and Douligeris, C. (2021).
Performance determinants in lora networks: A litera-
ture review. IEEE Communications Surveys & Tutori-
als, 23(3):1721–1758.
Grunwald, A., Schaarschmidt, M., and Westerkamp, C.
(2019). Lorawan in a rural context: Use cases and
opportunities for agricultural businesses. In Mobile
Communication - Technologies and Applications; 24.
ITG-Symposium, pages 1–6.
Haubro, M., Orfanidis, C., Oikonomou, G., and Fafoutis, X.
(2020). Tsch-over-lora: long range and reliable ipv6
multi-hop networks for the internet of things. Internet
Technology Letters, 3(4):e165.
Hilmani, A., Siham, A., and Maizate, A. (2022). An ad-
vanced comparative study of routing protocols in lo-
rawan. In 2022 5th International Conference on Ad-
vanced Communication Technologies and Networking
(CommNet), pages 1–6.
Islam, M. R., Bokhtiar-Al-Zami, M., Paul, B., Palit, R.,
Gr
´
egoire, J.-C., and Islam, S. (2023). Performance
evaluation of multi-hop lorawan. IEEE Access.
Jouhari, M., Saeed, N., Alouini, M.-S., and Amhoud, E. M.
(2023). A survey on scalable lorawan for massive iot:
Recent advances, potentials, and challenges. IEEE
Communications Surveys & Tutorials.
Kalør, A. E., Kotaba, R., and Popovski, P. (2022). Common
message acknowledgments: Massive arq protocols for
wireless access. IEEE Transactions on Communica-
tions, 70:5258–5270.
Kamal, M. A., Alam, M. M., Sajak, A. A. B., and Su’ud,
M. M. (2023). Requirements, deployments, and chal-
lenges of lora technology: A survey. Computational
Intelligence and Neuroscience, 2023.
Leenders, G., Callebaut, G., Ottoy, G., Van der Perre, L.,
and De Strycker, L. (2023). An energy-efficient lora
multi-hop protocol through preamble sampling for re-
mote sensing. Sensors, 23(11):4994.
Leonardi, L., Bello, L. L., and Patti, G. (2023). Mrt-lora:
A multi-hop real-time communication protocol for in-
dustrial iot applications over lora networks. Computer
Communications, 199:72–86.
Lin, S., Costello, D. J., and Miller, M. J. (1984). Automatic-
repeat-request error-control schemes. IEEE Commu-
nications Magazine, 22:5–17.
Lundell, D., Hedberg, A., Nyberg, C., and Fitzgerald,
E. (2018). A routing protocol for lora mesh net-
works. In 2018 IEEE 19th International Symposium
on” A World of Wireless, Mobile and Multimedia Net-
works”(WoWMoM), pages 14–19. IEEE.
Mabulu, K., Vainqueur, B., and Padir, T. (2024). A gesture-
based communication system for firefighters during
search and rescue missions. In IEEE International
Symposium on Safety Security Rescue Robotics, SSRR
2024, New York, NY, USA, November 12-14, 2024,
pages 72–77. IEEE.
Makridis, E., Charalambous, T., and Hadjicostis, C. (2022).
Arq-based average consensus over unreliable directed
network topologies. Systems and Control.
Mamour, D. and Congduc, P. (2019). Increased flexibility in
long-range iot deployments with transparent and light-
weight 2-hop lora approach. In 2019 Wireless Days
(WD), pages 1–6. IEEE.
Mendelsohn, A., Sofge, D., and Otte, M. W. (2024). En-
hancing search and rescue capabilities in hazardous
communication-denied environments through path-
based sensors with backtracking. In Dastani, M., Sich-
man, J. S., Alechina, N., and Dignum, V., editors,
Evaluating Use of ARQ Strategies in Communication Protocols for Search and Rescue
69

International Conference on Autonomous Agents and
Multiagent Systems, AAMAS 2024, Auckland, New
Zealand, May 6-10, 2024, pages 2387–2389. ACM.
Paredes, W. D., Kaushal, H., Vakilinia, I., and Prodanoff,
Z. (2023). Lora technology in flying ad hoc net-
works: a survey of challenges and open issues. Sen-
sors, 23(5):2403.
Sornin, N., Luis, M., Eirich, T., Kramp, T., and Hersent,
O. (2015). LoRa Specification 1.0, Lora Alliance
Standard specification. Available at: www.lora-
alliance.org.
Sun, Z., Yang, H., Liu, K., Yin, Z., Li, Z., and Xu, W.
(2022). Recent advances in lora: A comprehen-
sive survey. ACM Transactions on Sensor Networks,
18(4):1–44.
Tanjung, D., Byeon, S., Kim, D. H., and Kim, J. D.
(2020). Oodc: An opportunistic and on-demand for-
warding mechanism for lpwa networks. In 2020 In-
ternational Conference on Information Networking
(ICOIN), pages 301–306. IEEE.
Vasiliev, D. S. and Abilov, A. (2015). Relaying algorithms
with arq in flying ad hoc networks. In 2015 Interna-
tional Siberian Conference on Control and Communi-
cations (SIBCON), pages 1–5.
Wong, A. W.-L., Goh, S. L., Hasan, M. K., and Fattah, S.
(2024). Multi-hop and mesh for lora networks: Re-
cent advancements, issues, and recommended appli-
cations. ACM Computing Surveys, 56(6):1–43.
YOSHIMOTO, M., TAKINE, T., TAKAHASHI, Y., and
HASEGAWA, T. (1991). Waiting time and queue
length distributions for go-back-n and selective-repeat
arq protocols. In PUJOLLE, G. and PUIGJANER,
R., editors, Data Communication Systems and their
Performance, pages 247–260. North-Holland, Ams-
terdam.
Zhao, G., Lin, K., Chapman, D., Metje, N., and Hao, T.
(2023). Optimizing energy efficiency of lorawan-
based wireless underground sensor networks: A
multi-agent reinforcement learning approach. Inter-
net of Things, 22:100776.
Zhou, W., Tong, Z., Dong, Z. Y., and Wang, Y. (2019).
Lora-hybrid: A lorawan based multihop solution for
regional microgrid. In 2019 IEEE 4th International
Conference on Computer and Communication Sys-
tems (ICCCS), pages 650–654. IEEE.
Zorbas, D., Caillouet, C., Hassan, K. A., and Pesch, D.
(2021). Optimal data collection time in lora net-
works—a time-slotted approach. Sensors (Basel,
Switzerland), 21.
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
70
