
Manipulation of Deformable Linear Objects Using Model Predictive Path
Integral Control with Bidirectional Long Short-Term Memory Learning
Lukas Zeh
a
, Johannes Meiwaldt, Zexu Zhou
b
, Armin Lechler
c
and Alexander Verl
d
Institute for Control Engineering of Machine Tools and Manufacturing Units, University of Stuttgart, Stuttgart, Germany
Keywords:
DLO, MPPI, biLSTM, Manipulation, Control, Robotics.
Abstract:
The manipulation of Deformable Linear Objects (DLOs) such as cables poses a significant challenge for
automation due to their infinite degrees of freedom and non-linear dynamics. In this paper we present a
machine learning based optimal control approach for the manipulation of DLOs. This approach is divided
into two main components: modeling and control. For modeling the dynamics of the DLO, we propose a
learning based approach using a bidirectional Long Short-Term Memory (biLSTM) network. The biLSTM
network is trained on synthetic data generated by the MuJoCo physics engine. For manipulating the DLO, a
model predictive control strategy that employs Model Predictive Path Integral (MPPI) control is selected. The
proposed approach is evaluated through simulation and experiments. The results demonstrate the effectiveness
of the proposed method in achieving accurate and efficient manipulation of DLOs.
1 INTRODUCTION
Flexible objects such as textiles, cables or ropes (Mat-
suno et al., 2006) can be found almost everywhere,
both in everyday life and in the production environ-
ment. They belong to the class of deformable objects
(Keipour et al., 2022). A sub-category of deformable
objects are Deformable Linear Objects (DLOs). Ex-
amples of DLOs include cables, ropes and hoses. In
the context of robotic applications, rigid bodies are
typically assumed when gripping and manipulating
objects. This assumption is valid as long as the de-
formation of the objects is negligible. However, when
handling DLOs, the deformation of the object must be
taken into account. The automated handling of flex-
ible objects by robots is a research problem that has
not yet been entirely solved (Zhu et al., 2022; Zhou
et al., 2020).
The fundamental challenge in the manipulation of
flexible objects, such as DLOs, is that an external
force causes both a movement and a change in shape.
Due to the infinite degrees of freedom of DLOs, mod-
eling these nonlinearities during deformation is com-
plex. Especially for real-time robotic manipulation
a
https://orcid.org/0000-0003-2730-1383
b
https://orcid.org/0009-0002-2163-2528
c
https://orcid.org/0000-0002-4073-1487
d
https://orcid.org/0000-0002-2548-6620
tasks, accurate and computationally efficient dynamic
models are required. While both physics-based and
data-driven approaches exist, each has its own advan-
tages and disadvantages (Arriola-Rios et al., 2020).
To enable effective manipulation of DLOs, Model
Predictive Control (MPC) has been successfully em-
ployed for planning and control in dynamic environ-
ments involving DLOs (Yan et al., 2020; Wang et al.,
2022). MPC uses a predictive model to simulate and
optimize control actions over a finite time horizon,
making it suitable for systems with complex, time-
varying dynamics. In the context of DLOs, where
deformation must be anticipated and accounted for
during manipulation, MPC can utilise a learned or
physics-based model to generate feasible, optimized
trajectories.
This publication investigates the potential of
Model Predictive Path Integral (MPPI) control, a sam-
pling based variant of MPC, for the manipulation of
DLOs. Simulation data is generated to train the bidi-
rectional Long Short-Term Memory biLSTM network
to learn a model of the DLO dynamics offline. The
model is then used in an MPPI controller to determine
the trajectories for manipulating the DLO.
The contribution of our work can be summarized
as follows:
• We contribute datasets, model architecture and
model weights for modeling cables. The datasets,
model architecture and model weights are avail-
Zeh, L., Meiwaldt, J., Zhou, Z., Lechler, A. and Verl, A.
Manipulation of Deformable Linear Objects Using Model Predictive Path Integral Control with Bidirectional Long Short-Term Memory Learning.
DOI: 10.5220/0013703800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 47-58
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
47

able at https://doi.org/10.18419/DARUS-5050.
• We propose a framework for the manipulation of
DLOs that utilizes a Model Predictive Path Inte-
gral Controller to manipulate deformable objects.
• We demonstrate the effectiveness of our proposed
method in simulation and experiments.
The paper is organised as follows: In Section II, we
review related work. The dataset is introduced in Sec-
tion III, and our proposed framework is established in
Section IV. In Section V, we present our simulation
and experimental results.
2 RELATED WORK
The precise manipulation of Deformable Linear Ob-
jects (DLOs) requires a physics-based model that ac-
counts for both deformation and an appropriate rep-
resentation of object shape (Sanchez et al., 2018).
Modeling approaches can generally be divided into
physics-based and data-driven methods (Arriola-Rios
et al., 2020).
2.1 Physics-Based Modeling
Approaches
There are various physics-based modeling approaches
for DLOs. Particle-based models describe DLOs
as discrete particles whose positions change in ac-
cordance with Newton’s laws under the influence of
forces. In mass-spring-damper systems, these parti-
cles are connected by springs, and their physical pa-
rameters are described using parameters such as stiff-
ness and damping (Schulman et al., 2013). Although
these models are computationally efficient, they re-
quire precise parameterization, which limits their ap-
plicability to real-world industrial cables (Monguzzi
et al., 2025).
Point-based dynamics (PBD), on the other hand,
use geometric constraints to directly compute parti-
cle positions. They are more memory- and compute-
efficient than mass-spring systems but less physically
accurate (Arriola-Rios et al., 2020).
To achieve a more physically accurate represen-
tation, the DLO is discretized using Finite Element
Methods (FEM) and the deformation equations are
solved through numerical integration. However, FEM
approaches are computationally intensive and require
accurate material parameters (Koessler et al., 2021;
Yin et al., 2021). As a result, they are generally un-
suitable for real-time robotic manipulation tasks un-
less specific simplifications are made.
Other numerical methods make assumptions, such
as the absence of large deformations, which limits
their applicability in more dynamic tasks (Rabaetje,
2003). Meanwhile, Jacobian-based approaches use
local approximations to relate the movement of the
robot to the deformation of the object. While these
approaches are real-time capable, they only compute
local deformation models (Zhu et al., 2022).
2.2 Data-Driven Approaches
Data-driven models have gained popularity due to
their ability to capture the complex nonlinear dynam-
ics of DLOs. These models are trained using either
simulated (offline) data or real-world (online) data.
When using simulated data, physical-based models
are typically employed to generate the training data.
The advantage of using simulated data is the ease and
speed of data generation compared to collecting real-
world data.
Several deep learning approaches have been pro-
posed. For example, bidirectional Long Short-Term
Memory (biLSTM) networks have been used to prop-
agate DLO dynamics over time (Yan et al., 2020;
Yang et al., 2022). The interaction-biLSTM pro-
posed by Yang et al. outperformed a baseline biLSTM
model in terms of accuracy, although with slightly re-
duced computational efficiency.
Graph Neural Networks (GNNs) have also been
adopted to model DLO dynamics (Wang et al., 2022;
Cao et al., 2024). In GNN-based methods, the DLO
is represented as a graph of discrete capsule elements
connected by physically motivated constraints such as
bending stiffness, length restrictions, and collisions.
The nodes represent DLO elements, and the edges
capture the interactions between them.
Another approach uses radial basis function net-
works to estimate local deformation models via Ja-
cobian matrices, encoding the relationship between
DLO deformation and the robot end-effector position
(Yu et al., 2023).
While these methods are capable of modeling the
complex dynamics of DLOs, they typically require
large datasets to achieve robust performance. It is
therefore essential to assess whether models trained
on simulation data generalize well enough for real-
world robotic manipulation.
2.3 Model Predictive Control for DLO
Manipulation
Model Predictive Control (MPC) is a strategy used
for manipulating DLOs (Wang et al., 2022). It relies
on predictive models to simulate object dynamics and
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
48

optimize control actions over a time horizon. The pre-
dictive model can be either physics-based or learned
from data. MPC is particularly effective for ma-
nipulating deformable objects as it enables forward-
looking planning that takes into account the evolution
of the object’s shape.
A sampling-based variant of MPC, Model Predic-
tive Path Integral (MPPI) control, was first introduced
in (Williams et al., 2016) for the autonomous driving
of a high-speed RC car. In (Williams et al., 2017),
the authors generalized and formalized the MPPI
approach, proposing a learning-based, information-
theoretically grounded formulation. This extension
makes MPPI applicable in data-driven and model-
uncertain scenarios. Since then, MPPI has been ap-
plied in various robotic domains (Yan et al., 2020;
Bhardwaj et al., 2021; Pezzato et al., 2025). The
STORM framework, introduced in (Bhardwaj et al.,
2021) is a fast, sampling based model predictive con-
trol framework that works directly in joint space.
It enables real-time responses to complex manipula-
tion tasks, including collisions, joint boundaries and
uncertain perception, through GPU parallelization.
(Pezzato et al., 2025) use a GPU-based physics sim-
ulator as the dynamic model for MPPI control. This
allows high-contact tasks to be solved without explicit
modeling or learning, offering a fast, flexible and ro-
bust solution in the presence of uncertainties. (Yan
et al., 2020) used MPPI control to show the effec-
tiveness of their Coarse-to-fine rope state estimation
method. In their work the MPPI controller is used
to estimate the optimal gripping point of the rope for
manipulating the rope into a desired shape.
We extend existing works by applying MPPI con-
trol to manipulate different types of DLOs. We chose
a biLSTM model for modeling the DLO dynamics
based on the combination of high inference speed, ac-
ceptable accuracy and suitability for robust, flexible
control. To ensure optimal performance, we conduct
a hyperparameter search to identify the best model
configuration. The biLSTM model is used in com-
bination with a MPPI controller to generate optimal
trajectories for DLO manipulation. The effectiveness
of our approach is demonstrated through simulation
and experimental results.
3 DATASET
In the following, we describe the dataset used to train
the biLSTM model.
3.1 Simulation Environment
The datasets used to train the biLSTM model were
generated using the MuJoCo (Todorov et al., 2012)
physics engine. MuJoCo natively provides a plugin
for the simulation of DLOs. In this plugin, DLOs are
approximated as mass-spring systems. The DLO is
modeled as a chain of mass points, which are con-
nected by linear, torsional, and bending springs. The
individual spring-mass elements are modeled in sim-
plified manner as capsules with the corresponding
physical properties. This approach saves time in the
modeling process and also allows for a simple and in-
tuitive implementation. Furthermore, it has the ad-
vantage that the parameters of the DLO can be eas-
ily and quickly adjusted, enabling a wide range of
DLO variations to be simulated. To train the biLSTM
model, a DLO with a length of 0.5 m was modeled
in MuJoCo, consisting of 50 capsules with a diam-
eter of 1 cm. The number of 50 capsules was cho-
sen as a compromise between realistic behavior and
computation time. The higher the number of cap-
sules, the more degrees of freedom the system has.
This increase in degrees of freedom leads to an almost
exponential increase in computation time required to
simulate the DLO. The parameters to be set in the
simulation are the Young’s modulus [Pa], the shear
modulus [Pa], and the damping [Nms/rad] between
the individual capsules. Young’s modulus was cho-
sen as 4 × 10
6
Pa, the Shear modulus as 1 × 10
6
Pa,
and the damping was set to 1 Nms/rad. For the train-
ing of the biLSTM model, a simulation step time of
1 ms was chosen. The individuzal trajectories within
the datasets have a length of 5 s. Influences of grav-
ity, friction, and air drag are not considered in the
simulation. Figure 1 shows the data generation pro-
cess. For the simulation, the DLO is fixed at the right
end with a welding condition, so that this end be-
haves like a clamped end. The left end of the DLO
is manipulated by a robot arm. The robot arm per-
forms a random trajectory in the xy-plane at a height
of 0.15 m. For the data generation, the cable is ma-
nipulated from a straight line into a random shape by
moving the left end of the DLO to a random posi-
tion within the green box. The target position of the
robot is chosen randomly for each trajectory within
the range of x ∈ [0.05, 0.35] m and y ∈ [−0.2, 0.2] m
(green area in Figure 1). The origin coordinate sys-
tem is located in the center of the manipulated cap-
sule. To generate a wider range of deformations, the
DLO is also randomly rotated around the z-axis in the
range of ψ ∈ [−1, 1] rad. The target position range
was chosen to avoid overstretching the DLO. During
the data generation, the positions of the 50 capsules
Manipulation of Deformable Linear Objects Using Model Predictive Path Integral Control with Bidirectional Long Short-Term Memory
Learning
49

target position
fixed
free
Figure 1: Dataset Generation. The cable is manipulated from a straight line to a random shape by moving the free end of the
cable to a random position within the green box.
X
DLO
, the end effector position X
TCP
, and velocity
v
TCP
are recorded.
3.2 Representation of DLO in 2D
Since the manipulation takes place on a surface, we
chose a representation of the DLO in 2D, similar to
(Yan et al., 2020). For the training of the biLSTM
model, the simulation data is reduced. Instead of us-
ing all 50 simulated capsules, in order to reduce the
computing time, only every 5th capsule is used for
training, resulting in a total of n = 10 capsules. The
first and last capsules are also removed, as these are
not needed for predicting the DLO dynamics. The
position of the first capsule is described by the pose
of the end effector X
TCP
. The position of the last
capsule remains constant due to the welding con-
dition. The position of the DLO can therefore be
described as a sequence of points in 3D Cartesian
space X
DLO
∈ R
n×2
. For better generalization of
the biLSTM model, the relative position of the cap-
sules with respect to the end effector position x
TCP
is used instead of the absolute position, computed as
x
r,i
= x
i
− x
TCP
for i = 1, . . . , n. For the calculation of
the relative positions, only the x and y coordinates are
used, as the z-coordinate is constant due to the fixed
height of the end effector. The relative positions of
the individual capsules of the DLO are described by
X
DLO
= (x
r,1
, x
r,2
, ..., x
r,n
). (1)
The advantage of this representation is the transla-
tional invariance, which allows the neural network to
learn the deformation of the DLO not from the ab-
solute positions, but by directly linking the deforma-
tion to the end effector position. The velocity of the
capsules is described by the difference of the relative
positions at time t and t − 1. The overall state of the
DLOs is described by
S
DLO
= (X
DLO
,
˙
X
DLO
). (2)
The state of the end effector is described by the Carte-
sian position of the end effector, as well as the rotation
of the end effector around the z-axis. The state of the
end effector is therefore described in detail as follows:
S
TCP
= (X
TCP
,
˙
X
TCP
) = ((x, y, z, ψ), ( ˙x, ˙y, ˙z,
˙
ψ)). (3)
The overall state of the system
S
g
= (S
DLO
, S
TCP
), (4)
is obtained by combining the state of the DLO and the
state of the end effector.
4 PROPOSED FRAMEWORK
In this section, we introduce the proposed framework
for cable manipulation. The manipulation of the cable
is done in 2D. First, an overview of the system used
for the manipulation task is given. Then, the bidirec-
tional Long-Short-Term-Memory (biLSTM) model
for modeling the DLO dynamics is introduced. Fi-
nally, the Model Predictive Path Integral (MPPI) con-
troller used to manipulate the DLO to the desired
shape is described.
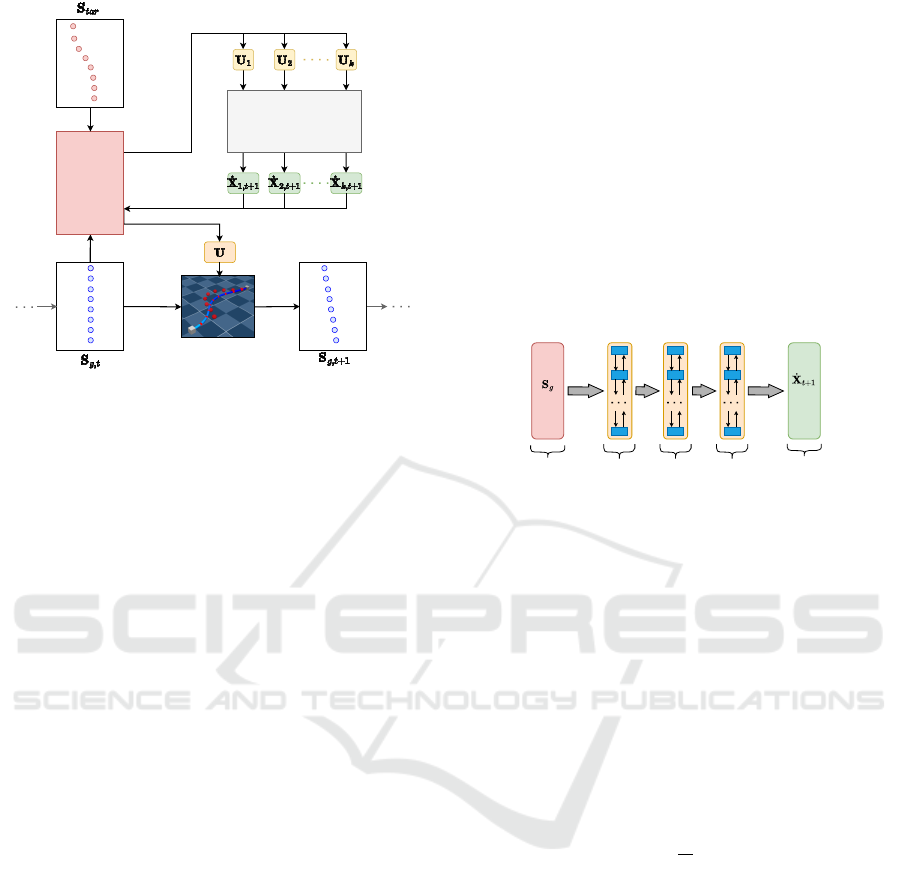
4.1 System Overview
The framework for cable manipulation, as displayed
in Figure 2, consists of a biLSTM model and a MPPI
controller. As an input for the system, the current state
of the DLO S
g,t
and the desired shape of the DLO
S
tar
are used. The current state of the DLO, S
DLO
, is
defined by the relative positions and velocities of the
capsules, as described in the previous section. The
desired shape of the DLO is represented by the target
position of the capsules. Based on the current state of
the DLO and the desired shape, the MPPI controller
generates a set of random trajectories U
i
. These tra-
jectories are then sent to the biLSTM model, which
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
50
robot TCP
MPPI
controller
biLSTM
model
Figure 2: The proposed framework for cable manipulation
uses a biLSTM model trained on synthetic data to predict
DLO deformation. This prediction is passed to the MPPI
controller, which computes the optimal robot control input.
predicts the velocities of the capsules for the next time
step
˙
X
i
. The information about the resulting defor-
mation of the DLO is then used to calculate the cost
function for the MPPI controller. The best trajectory
is selected based on the cost function and sent to the
robot for execution. This execution leads to a new
state of the DLO S
g,t+1
, which is then used as input
for the next iteration of the MPPI controller. The pro-
cess is repeated until the DLO has reached the desired
shape.
4.2 biLSTM Cable Model
As in the works of (Yang et al., 2022), (Yan et al.,
2020), and (Gu et al., 2025), a biLSTM model is em-
ployed for modeling the DLO, as it has been shown
to effectively capture its dynamic behavior. The
biLSTM model is a type of recurrent neural net-
work (RNN) that is particularly well-suited to se-
quence prediction tasks. The biLSTM is able to cap-
ture the dynamics and temporal dependencies of the
DLO by processing the sequence of relative positions
of the capsules and their velocities. Unlike standard
RNNs, information flows in both temporal directions,
allowing the model to use both past and future con-
text for improved sequence understanding. This fea-
ture allows for more effective modeling of relation-
ships along the DLO structure. This bidirectional
processing enhances the LSTM’s ability to capture
long-range interactions, improving its performance in
sequential deformation modeling tasks. Compared
to unidirectional networks such as MLPs, standard
RNNs, or unidirectional LSTMs, biLSTMs have ad-
vantages in modeling the complex dynamics of de-
formable linear objects (Yang et al., 2022). To bet-
ter capture the coupled dynamics, the biLSTM addi-
tionally incorporates the end-effector state as input,
enabling the model to learn the interaction between
actuator motion and DLO deformation. Thus, the
complete system state S
g
is provided as input to the
biLSTM model. The general structure of the biLSTM
model is shown in Figure 3. Its architecture consists
of an input layer, one or more stacked biLSTM layers,
and a fully connected output layer. This output layer
predicts the capsule velocities for the next time step.
The predicted velocities are then used to compute the
cost function for the MPPI controller.
Input
1. biLSTM
layer
Output
2. biLSTM
layer
3. biLSTM
layer
Figure 3: The biLSTM architecture used for modeling the
DLO consists of an input layer, three biLSTM layers and an
output layer.
4.2.1 Training
The biLSTM model is trained on the data generated
in the simulation environment. The biLSTM model
is trained using 10,000 trajectories. These trajectories
are split into training and test data, with 80 % of the
data used for training and 20 % for testing. The train-
ing is performed using the Adam optimizer and the
Mean Squared Error (MSE) loss function. The MSE
loss function is defined as:
MSE(y, ˆy) =
1
N
N
∑
i=1
(y
i
−
ˆ
y
i
)
2
, (5)
where N is the number of nodes, y
i
is the true veloc-
ity of the node i and
ˆ
y
i
is the predicted velocity of the
node i. To determine the optimal hyperparameters for
the biLSTM model, both a random search and a grid
search were performed. The random search was used
to perform an initial narrowing down of the hyperpa-
rameters. The random search showed that the most
effective models consistently used a hidden layer size
of 256 or 512, were trained for up to 100 epochs, and
employed a learning rate between 1e-5 and 1e-3. A
low weight decay between 1e-7 and 1e-5 was also
common among top-performing configurations. The
number of biLSTM layers varied between 2 and 6, in-
dicating that model depth was less critical compared
to other parameters. Training the model for more
than 50 epochs didn’t yield significant improvements,
Manipulation of Deformable Linear Objects Using Model Predictive Path Integral Control with Bidirectional Long Short-Term Memory
Learning
51
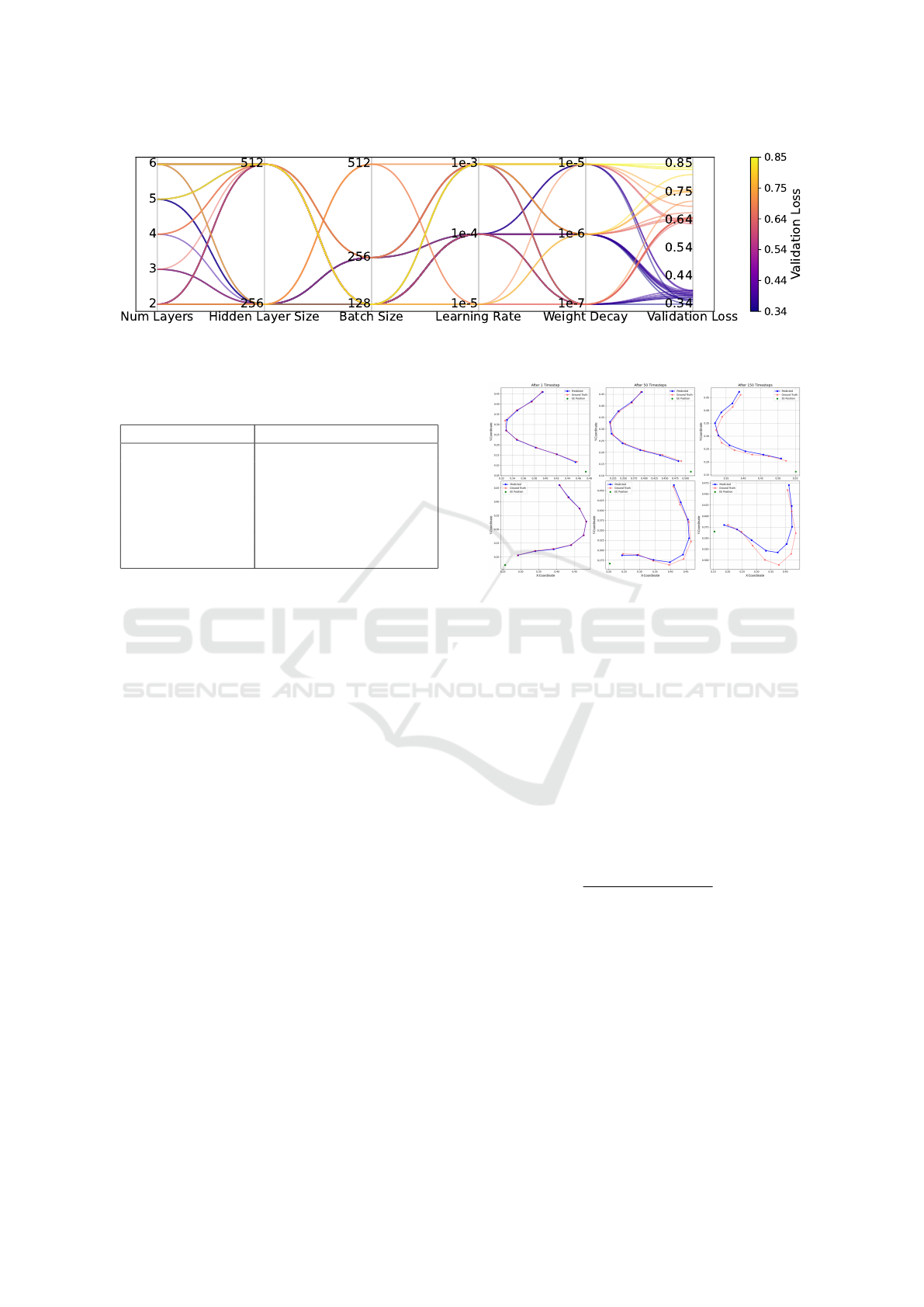
Figure 4: Performance of the biLSTM model in terms of validation loss for different hyperparameter combinations. Visualized
are the top 10 % and the bottom 10 % of hyperparameter combinations during grid search.
Table 1: Hyperparameters of the biLSTM model, bold val-
ues are also used for grid search.
Hyperparameter Values Random Search
biLSTM Layers [1, 2, 3, 4, 5, 6]
Hidden Layer Size [8, 16, 32, 64, 128, 256,
512, 1024]
Epochs [10, 20, 30, 40, 50, 100]
Batch Size [16, 32, 64, 128, 256, 512]
Learning Rate [1e-3, 1e-4, 1e-5, 1e-6]
Weight Decay [1e-4, 1e-5, 1e-6, 1e-7]
suggesting that the model converged well within this
range. In contrast, poor performance was associated
with smaller hidden layer sizes, overly small learning
rates, high weight decay values, and very small batch
sizes. These results suggest that model capacity, suf-
ficient training duration, and a well-tuned optimiza-
tion setup are essential for achieving high prediction
accuracy. Based on these findings, a subsequent grid
search was then used to find the optimal hyperparame-
ters in a smaller range. In the table 1, the hyperparam-
eters of the biLSTM model are summarized. Figure
4 shows the model performance of various hyperpa-
rameter combinations, obtained through grid search,
in terms of the validation loss.
Based on the hyperparameter study, the model
with the best performance in terms of validation loss
was selected. The model was trained using a learning
rate of 1e-4 in combination with a weight decay of 1e-
7. The model with the best performance was trained
with batchsize 128 and consists of three biLSTM lay-
ers, as shown in Figure 3. Each biLSTM layer con-
sists of 512 neurons (this is equivalent to a hidden
layer size of 256 neurons in each direction). In the
following section, the performance of this model is
evaluated.
4.2.2 Model Evaluation
In order to use the biLSTM model in simulation or
Model Predictive Control (MPC), a precise rollout
prediction over multiple time steps is crucial. A roll-
Figure 5: Shape-error e
shape,biLSTM
after 1, 50 and 150
timesteps. The blue line represents the model prediction,
while the transparent red line represents the ground truth.
out is a sequence of predicted states over a certain
time horizon, which is used to evaluate the model’s
performance in predicting the DLO dynamics. The
quality of the dynamic model significantly influences
the selection of optimal control sequences. The model
quality is evaluated based on rollouts over 50 time
steps (equivalent to 1 second) and 150 time steps
(equivalent to 3 seconds). As a metric for the model
quality, the average shape error e
shape
and the average
velocity error e
vel
are used.
e
shape, biLSTM
= ∥x
groundtruth
− x
pred
∥
2
, (6)
e
vel, biLSTM
=
∥
˙
x
groundtruth
−
˙
x
pred
∥
2
∥
˙
x
groundtruth
∥
2
× 100 %. (7)
The model is evaluated on 100 rollouts, each with
a length of 150 time steps (3 seconds). The average
shape error e
shape, biLSTM
and the average velocity er-
ror e
vel, biLSTM
are calculated over all rollouts. The
model is able to predict the shape of the DLO with an
average shape error e
shape, biLSTM
of 3.3 cm and the ve-
locity with an average velocity error e
shape, biLSTM
of
61.59 % (similar to those in (Yang et al., 2022)). The
error of both the shape and the velocity increases with
the number of time steps. Figure 5 shows qualita-
tive results of the shape error over 1, 50 and 150 time
steps. The blue line represents the model prediction,
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
52

while the transparent red line represents the ground
truth. The biLSTM model shows stable predictions,
even over long time intervals. Structure, length and
curvature are preserved, indicating a high model ca-
pacity and robust dynamic capture.
4.3 Model Predictive Path Integral for
Manipulation
Model Predictive Control (MPC) is a well-established
control strategy that has been successfully used to ma-
nipulate deformable objects (Wang et al., 2022; Yu
et al., 2022). In this paper, the DLO is manipulated
using a Model Predictive Path Integral (MPPI) based
control strategy, similar to that in (Yan et al., 2020)
and (Williams et al., 2016). MPPI is a sampling-based
Model Predictive Control strategy particularly suited
to handling complex systems and multiple objectives.
In this context, MPPI is employed to compute a
control strategy that transforms an initial configura-
tion into a desired target configuration through shape
control. Actions are represented as target positions
for the end effector (EE).
The MPPI algorithm is based on the principle of
sampling multiple control sequences around a nomi-
nal sequence. A new control sequence is then gener-
ated as a weighted average of these control sequences.
This new sequence is then used to construct the nom-
inal control sequence for the next iteration.
A special feature of MPPI lies in the evaluation
of the simulated trajectories. Each trajectory is as-
signed a cost value indicating how well the system
performs under the respective control inputs. After
simulating numerous future trajectories, each trajec-
tory is assigned a unique set of disturbance values.
The MPPI algorithm calculates a weighted sum of
these disturbances. This nominal control sequence is
initialized using one of two alternative mechanisms.
When no prior solution exists, a zero-valued sequence
spanning the planning horizon is used as the starting
point. However, when a previous solution is available,
a receding horizon approach is employed. In this ap-
proach, the prior solution is propagated forward by
one timestep and the terminal control action is reset
to zero. This warm-start methodology maintains so-
lution continuity while adhering to the principles of
Model Predictive Control.
Each trajectory is evaluated based on its cost
value, with lower-cost trajectories receiving higher
weights and thus have a greater influence on the con-
trol update. Specifically, the weight of a trajectory is
determined by the exponential function of the nega-
tive ratio of its cost to a fixed parameter λ, also known
as temperature (Williams et al., 2017):
w
k
= e
−
s
k
λ
, (8)
where s
k
represents the cost of trajectory k. The cost
function used in MPPI consists of two terms: a shape
cost and a control cost. The shape cost penalizes de-
viations from the target configuration and is defined
using the Euclidean seminorm:
C
S
= 0.5 ·
N
∑
i=1
e
⊤
shape,i
· Q · e
shape,i
, (9)
where Q = diag(w
1
, w
2
, . . . , w
i
) is a diagonal matrix
assigning positive weights w
i
to each feature point in
the plane. The control cost penalizes excessive input
effort and is given by:
C
R
= 0.5 ·
N
∑
i=1
u
⊤
b,i
· R · u
b,i
, (10)
where R is the weighting matrix for the sampled con-
trol inputs u
b
.
To compute a valid probability distribution over
trajectories, the raw weights are normalized:
˜w
k
=
w
k
∑
k
j=1
w
j
. (11)
This normalization ensures that trajectories with
lower costs contribute more strongly, while keeping
the overall influence balanced.
The MPPI (Model Predictive Path Integral) algo-
rithm proceeds as described in Algorithm 1. It begins
with the initialization of a nominal control sequence
U = {u
0
, u
1
, . . . , u
N−1
}, which is typically initialized
to zero. In each iteration, a set of K trajectories is gen-
erated by sampling random disturbances δu
k
for every
time step across the prediction horizon. These distur-
bances are added to the nominal control sequence to
create perturbed control sequences. These are then
used in a Monte Carlo tree search. For generating
the random disturbances δu
k
, pink noise (Eberhard
et al., 2023) is used. Each control sequences simu-
lates the system’s response to the disturbed input se-
quence. For deformable linear object (DLO) manipu-
lation, this simulation is performed using the biLSTM
model, which predicts the resulting DLO states
˙
X
i
based on the current system state S
g,t
and the sam-
pled control input. The resulting trajectory is evalu-
ated using a cost function that measures the deviation
from the target state S
tar
as well as the control effort.
The total cost of each trajectory s
k
is computed, and
the corresponding weight ˜w
k
is derived as described
above. The nominal control sequence is then updated
using a cost-weighted average of the disturbances:
U ← U +
K
∑
k=1
˜w
k
· δu
k
. (12)
Manipulation of Deformable Linear Objects Using Model Predictive Path Integral Control with Bidirectional Long Short-Term Memory
Learning
53
This update shifts the nominal inputs towards those
associated with lower-cost trajectories, thereby grad-
ually improving control performance. The updated
control input is applied to the system, which advances
by one time step. The resulting new system state is
recorded and used as input to the biLSTM model for
the next iteration. The first element u
0
of the opti-
mized control vector U, produced by the MPPI con-
troller, is applied to the robot or EE. The resulting
system state is then updated. This process is repeated
until a termination condition is met, either after a
fixed number of iterations or when the distance error
threshold is reached.
Data: Initial state S(g, t
0
), model dynamics,
cost function, prediction horizon N,
number of control sequences K
Result: Optimized control input sequence
U
0..N−1
initialize control sequence U
0..N−1
;
while target not reached do
generate random disturbances δU;
for control sequences k = 1..K do
start at current state X
k,0
= X(t
0
);
for horizon steps n = 0..N − 1 do
input U
k,n
= U
n
+ δU
k,n
;
next state
X
k,n+1
= biLSTM(X
k,n
, U
k,n
);
trajectory cost s
k
= control cost
C
R
+ shape cost C
S
;
end
end
for n = 0..N − 1 do
U
n
+ = reward-weighted disturbance;
end
apply first input U
0
as control input;
receive current state;
check if target is reached;
end
Algorithm 1: MPPI Monte-Carlo-Algorithmus.
As shown in Figure 2, this complete process en-
ables model-based manipulation of deformable ob-
jects by optimizing a control sequence that minimizes
cost while adapting to the predicted system dynamics.
5 SIMULATION AND
EXPERIMENTS
In this section, the simulation and experimental re-
sults are presented and discussed. The goal of the sim-
ulation and experiments is to analyze the behavior of
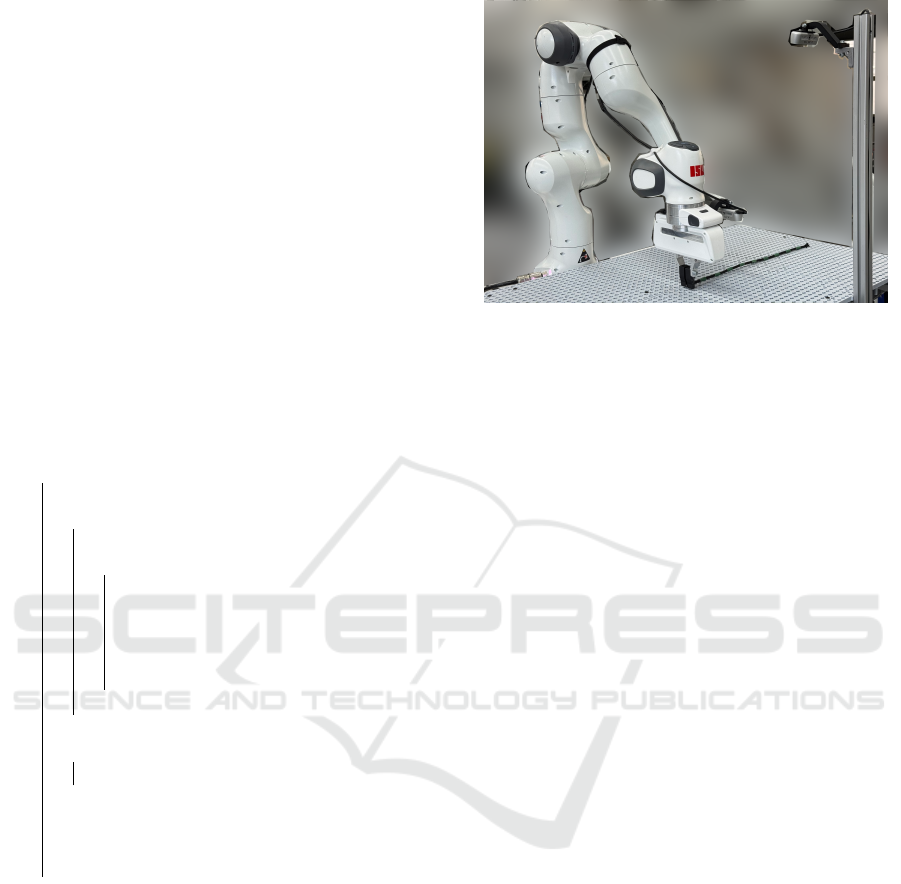
Figure 6: Experiment Setup.
the DLO and the performance of the MPPI controller.
The simulation and experiments are performed with a
Franka Emika Panda robot. First, the simulation and
experimental setup is described. Then, the results are
presented and discussed.
5.1 Simulation and Experimental Setup
1. Simulation Setup: The simulation environment
is built using the MuJoCo physics engine. As in
the simulation, the cable has a length of 50 cm
and a diameter of 1 cm. Young’s modulus is
4 × 10
6
Pa, the Shear modulus is 1 × 10
6
Pa and
damping is set to 1 Nms/rad. One Franka Emika
Panda robot moves one end of the cable so that the
shape of the cable matches the desired shape. The
other end of the cable is fixed.
2. Experiment Setup: The experimental setup is
shown in Figure 6. A Franka Emika Panda robot
is used to manipulate the cable so that the shape
of the cable matches the desired shape. The other
end of the cable is fixed using two zip ties. An
Intel Realsense D435i RGB-D camera is used to
track the shape of the cable. The biLSTM model
and the MPPI controller are implemented on a
Ubuntu 24.04 real-time desktop computer. The
robot trajectories are sent to the robot for execu-
tion with a communication frequency of 1,000 Hz.
The camera data is processed with 40 fps.
5.2 Simulation Results
In the following, the results of the simulation are pre-
sented. The simulation was performed using the Mu-
JoCo model of the Franka Emika Panda robot pro-
vided by the MuJoCo physics engine. The left end of
the DLO is firmly gripped by the end effector of the
robot. The right end of the DLO is fixed. The initial
pose of the robot is set to reflect the initial position
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
54
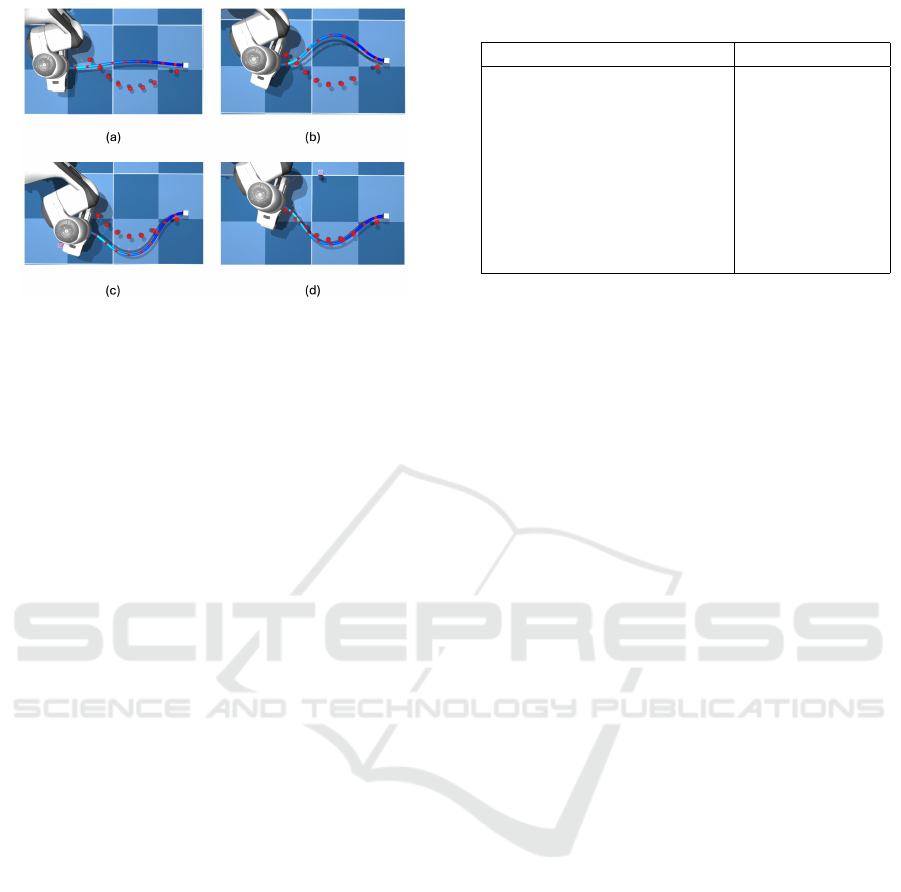
Figure 7: Steps of the shape control in the simulation envi-
ronment.
of the DLO, meaning the robot is positioned so that
the DLO is in a straight line. Each control output of
the MPPI controller is set as the target position for a
motion capture body. This body serves as the Carte-
sian target position for the inverse kinematics control
of the robot. The control process was performed in
the x-y-plane, while the z-position was kept constant
at 10 cm. The rotation around the z-axis also received
a direct control input from the MPPI output. The con-
trol values were limited to a range of -0.2 m to 0.2 m
in the x-direction and 0 m to 0.35 m in the y-direction.
This reflects the workspace during the generation of
the training data. The parameters of the MPPI con-
troller are displayed in Table 2. These parameters
were determined empirically through a series of ex-
periments.
First, the performance of the MPPI controller is
evaluated by shaping the DLO into a U-shape. Figure
7 shows the process of the shape control in the sim-
ulation. In (a), the initial state of the DLO is shown.
In (b), the DLO is deformed to the opposite side of
the target position. In (c), the MPPI control could
compensate for the initial deformation and move the
DLO to the other side. In (d), the MPPI control
has approached the target position and the trial has
ended. 100 trials were performed, with a success cri-
terion being a maximum deviation of 2 cm between
the positions of the simulated capsules (represented
by red dots on the cable) and their corresponding tar-
get points (represented by red dots on the plane). The
success rate was 93 %, with an average time of 7.26 s
per successful trial. A successful trial is defined as
a trial in which the DLO is shaped into the desired
U-shape within 30 seconds.
Additionally, the performance of the MPPI con-
troller is evaluated over 1,000 trials of shaping the
DLO into random goal shapes. The success rate was
20.5 %, with an average time of 13.3 s per successful
Table 2: MPPI parameters in simulation.
Parameter Value
Horizon (H) 5
Time increment (dt) 0,2
Number of samples (N) 20
Temperature (λ) 0.002
Standard deviation of the
disturbances (δ)
[0.5;0.5;0; 3]
for [X, Y, Z, Rot(Z)]
Form error weighting (Q) 150
Control error weighting (R) 5
trial.
The simulation results show that the MPPI-based
control in combination with a biLSTM dynamics
model is able to shape the DLO into a desired target
shape. The approach combines sample-based control
with a neural network for modeling the DLO dynam-
ics. By training with relative positions of the capsules,
the approach can also be transferred to new scenarios.
However, re-optimizing the MPPI parameters is nec-
essary in scenarios where the target shape differs sig-
nificantly from the one for which the controller was
originally tuned. Additional parameterization is also
required to handle severe deformations of the DLO
effectively. One limiting factor is the computational
demand of the biLSTM model, especially when pro-
cessing a large number of fault samples. Increasing
computing resources could improve the controller’s
performance, as a larger sample size generally leads
to greater accuracy and robustness. Another poten-
tial bottleneck is the current sampling strategy used by
the MPPI controller. Using an adaptive sampling ap-
proach where exploration during the construction of
the search tree focuses only on trajectories with high
solution potential, might improve the results.
5.3 Experiment Results
The performance of the MPPI controller is evaluated
across three different scenarios. In the first scenario,
2D shape control is performed on a 50 cm long cable
with a diameter of 6 mm, equipped with 9 markers.
The second scenario uses the same cable and marker
setup, but shape control is conducted in 3D. The third
scenario involves 2D shape control of a 50 cm long
wire with a diameter of 1.5 mm, without any mark-
ers. While initial parameter tuning was performed in
simulation, further adjustments were necessary dur-
ing practical validation to compensate for discrepan-
cies between simulated and real-world behavior. The
MPPI controller parameters remain consistent across
all scenarios and are listed in Table 3.
In all three scenarios, the cable is manipulated into
Manipulation of Deformable Linear Objects Using Model Predictive Path Integral Control with Bidirectional Long Short-Term Memory
Learning
55
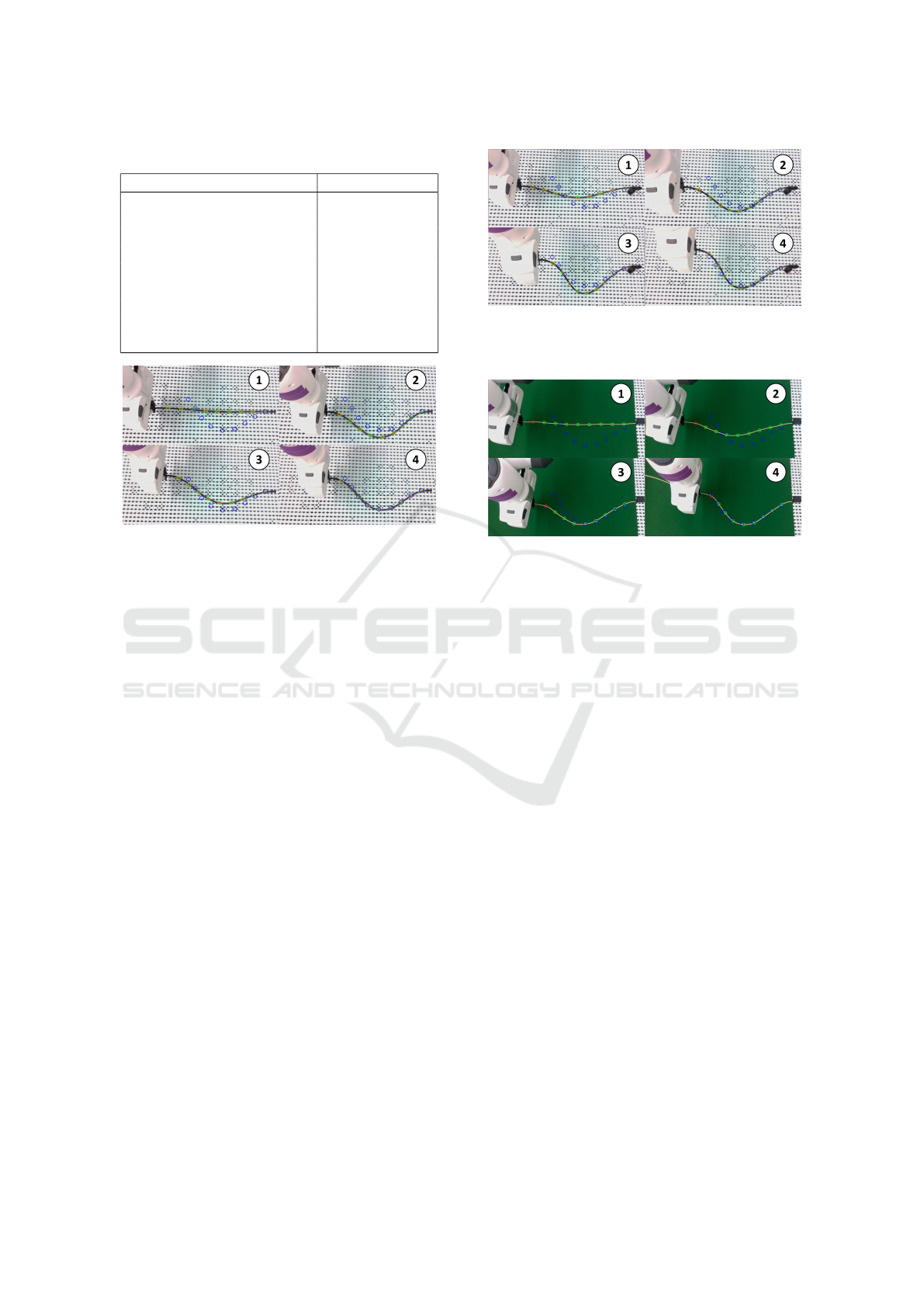
Table 3: MPPI parameters in experiment.
Parameter Value
Horizon (H) 8
Time increment (dt) 0.02
Number of samples (N) 200
Temperature (λ) 0.002
Standard deviation of the
disturbances (δ)
[0.2;0.2;0; 0.02]
for [X, Y, Z, Rot(Z)]
Form error weighting (Q) 150
Control error weighting (R) 5
Figure 8: Experiment result of the 2D shape control of a
50 cm long cable with a diameter of 6 mm, marked with 9
markers. The cable is manipulated into a U-shape.
a U-shape. The goal of the shape control experiments
is to shape the cable into the desired U-shape with
a maximum deviation of 2 cm from the target posi-
tion. The derivation of the target position is based
on the difference between the measured positions of
the markers on the cable and the target positions of
the markers. In the first and second scenario, 9 mark-
ers along the cable are used to track the shape of the
cable. The positions of these markers are tracked us-
ing a color filter. In the third scenario, no markers
are used to track the shape of the cable. Instead, the
FastDLO algorithm (Caporali et al., 2022) is used for
shape estimation. Based on the estimated shape, 9
virtual markers are placed along the tracked shape in
order to keep the process of the shape control as sim-
ilar as possible to the first two scenarios.
In the first scenario, the cable is mounted directly
on the working plane. In Figure 8, the process of a
successful 2D shape control is shown. Indicated are
the initial state of the cable and robot (1), two inter-
mediate states (2) and (3), and the final state of the
cable and robot (4), where the cable has been suc-
cessfully shaped into the desired U-shape. To evalu-
ate the performance of the MPPI controller, 20 trials
were performed. The success rate was 85 %, with an
average time of 15.7 s per successful trial. The fastest
trial took 2.1 s, and the slowest took 45.2 s. In the
second scenario, the cable is mounted on a 7 cm high
platform. As in the first scenario, the 9 markers are
Figure 9: Experiment result of the 3D shape control of a
50 cm long cable with a diameter of 6 mm, marked with 9
markers. The cable is manipulated into a U-shape.
Figure 10: Experiment result of the 2D shape control of a
50 cm long wire with a diameter of 1.5 mm. The cable is
manipulated into a U-shape.
used to track the shape of the cable. The positions of
these markers are tracked by using a color filter. In
Figure 9, the process of a successful 3D shape control
is shown. The starting position of the robot remains
the same as in the first scenario. This leads to the
cable being slightly bent by gravity at the beginning
,which can be seen in (1). In (2) and (3), two inter-
mediate states of the shape control are displayed. The
final state of the cable and robot can be seen in (4),
where the cable has been successfully shaped into the
desired U-shape.
Even though this scenario was not trained, the
MPPI controller is able to manipulate the cable into
a U-shape. The process of the shape control is not
as roboust as in the first scenario, leading to a higher
failure rate. In the pracical experiments, failure was
defined as a trial in which the DLO is not shaped into
the desired U-shape within 90 seconds. Also, the time
to reach the target position is significantly higher. To
evaluate the controller, 20 trials were performed. The
success rate was 50 %, with an average time of 28.3 s
per successful trial. The fastest trial took 10.4 s, and
the slowest 80.5 s. In the third scenario, we used
a thinner and more flexible wire with a diameter of
1.5 mm. This wire was selected to test the perfor-
mance of the biLSTM model in respect to generaliza-
tion. Like in the first scenario, the wire is mounted
directly on the working plane. In this scenario, no
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
56

markers are used to track the shape of the wire, as
we want to test the performance in a more real-world-
like scenario. Instead, the FastDLO algorithm (Capo-
rali et al., 2022) is used for shape estimation. Since
the background of the testbench is white and the wire
used is light yellow, we needed to use a greenscreen
to be able to track the shape of the wire. In Figure 10,
the process of a successful 2D shape control is shown.
The starting position of the robot remains the same as
in the first scenario. In (1), the initial state of the wire
and Robot is shown. In (2) and (3), two intermediate
states of the shape control are displayed. In (4), the
final state of the wire and robot can be seen, where
the wire has been successfully shaped into the desired
U-shape.
Like in the second scenario, this scenario is less
robust than the first scenario. Also leading to a higher
failure rate and a longer time to reach the target po-
sition. To evaluate the controller, 20 trials were per-
formed. The success rate was 60 %, with an average
time of 25.4 s per successful trial. The fastest trial
took 8.2 s and the slowest 65.3 s.
Additionally to the shapes shown in the figures,
we also performed trials with different target shapes.
The more the target shapes resemble a U-shape, the
more the more likely the controller is to successfully
shape the DLO into the desired shape. As the simula-
tion results have shown, this control approach strug-
gles especially with shapes requiring significant de-
formations. Since the cable and wire used in the ex-
periments are pre-bend in one direction, the controller
also struggles to deform the DLOs in the direction op-
posite to the pre-bend. Additionally, the approach is
likely to fail if the DLO is deformed in the wrong di-
rection at the beginning of the trial.
Besides these issues and limitations, the results of
the experiments show that the MPPI-based control in
combination with a biLSTM dynamics model, is able
to shape the DLO into a desired target shape. The
experiments have also shown that the biLSTM model
is able to model different kinds of DLOs with very
different properties. As mentioned before, the MPPI
controller has to be retuned for scenarios that are not
similar to the scenario for which the controller was
initially tuned.
6 DISCUSSION AND FUTURE
WORKS
In this paper, we presented a novel approach for the
manipulation of deformable linear objects (DLOs) us-
ing a biLSTM model and a Model Predictive Path
Integral (MPPI) controller. The approach combines
a neural network for modeling the DLO dynamics
with a sampling-based control strategy. The biLSTM
model is trained on a dataset of simulated DLO tra-
jectories, which are generated using a MuJoCo model
of the DLO. The model is able to predict the shape
and velocity of the DLO over multiple time steps.
The MPPI controller is used to manipulate the DLO
into a desired target shape. The approach was eval-
uated in simulation and experiments using a Franka
Emika Panda robot. The results show that the MPPI-
based control in combination with a biLSTM dynam-
ics model is able to shape the DLO into a desired tar-
get shape. The approach is able to generalize to differ-
ent kinds of DLOs with different physical properties.
In the future, we want to tune the pretreained mod-
els with real data in order to minimize the sim to real
gap and obtain more robust models. We also want
to test different kinds of neural networks inside the
Model Predictive Control loop, in order to evaluate
if the approach becomes more robust or faster when
faster or more accurate models are used. In respect
to faster models, we want to test the performance of
MLPs. In respect to more accurate models, we want
to test the performance of GNNs.
In order to improve the performance of the MPPI
controller, we want to investigate different sampling
strategies and different cost functions.
ACKNOWLEDGEMENTS
This work was funded by Deutsche Forschungsge-
meinschaft (DFG, German Research Foundation) un-
der Germany´s Excellence Strategy – EXC 2075 –
390740016.
REFERENCES
Arriola-Rios, V. E., Guler, P., Ficuciello, F., Kragic, D., Si-
ciliano, B., and Wyatt, J. L. (2020). Modeling of De-
formable Objects for Robotic Manipulation: A Tuto-
rial and Review. Frontiers in Robotics and AI.
Bhardwaj, M., Sundaralingam, B., Mousavian, A., Ratliff,
N., Fox, D., Ramos, F., and Boots, B. (2021).
STORM: An Integrated Framework for Fast Joint-
Space Model-Predictive Control for Reactive Manip-
ulation.
Cao, B., Zang, X., Zhang, X., Chen, Z., Li, S., and Zhao,
J. (2024). Shape Control of Elastic Deformable Lin-
ear Objects for Robotic Cable Assembly. Advanced
Intelligent Systems, 6(7).
Caporali, A., Galassi, K., Zanella, R., and Palli, G. (2022).
FASTDLO: Fast Deformable Linear Objects Instance
Segmentation. IEEE Robotics and Automation Let-
ters, 7(4).
Manipulation of Deformable Linear Objects Using Model Predictive Path Integral Control with Bidirectional Long Short-Term Memory
Learning
57

Eberhard, O., Hollenstein, J., Pinneri, C., and Martius, G.
(2023). Pink noise is all you need: Colored noise
exploration in deep reinforcement learning. In Pro-
ceedings of the Eleventh International Conference on
Learning Representations (ICLR 2023).
Gu, F., Sang, H., Zhou, Y., Ma, J., Jiang, R., Wang, Z., and
He, B. (2025). Learning Graph Dynamics with Inter-
action Effects Propagation for Deformable Linear Ob-
jects Shape Control. IEEE Transactions on Automa-
tion Science and Engineering.
Keipour, A., Bandari, M., and Schaal, S. (2022). De-
formable One-Dimensional Object Detection for
Routing and Manipulation. IEEE Robotics and Au-
tomation Letters, 7(2).
Koessler, A., Filella, N. R., Bouzgarrou, B., Lequievre, L.,
and Ramon, J.-A. C. (2021). An efficient approach
to closed-loop shape control of deformable objects us-
ing finite element models. In 2021 IEEE International
Conference on Robotics and Automation (ICRA).
Matsuno, T., Tamaki, D., Arai, F., and Fukuda, T. (2006).
Manipulation of deformable linear objects using knot
invariants to classify the object condition based on im-
age sensor information. IEEE/ASME Transactions on
Mechatronics, 11(4).
Monguzzi, A., Dotti, T., Fattorelli, L., Zanchettin, A. M.,
and Rocco, P. (2025). Optimal model-based path plan-
ning for the robotic manipulation of deformable linear
objects. Robotics and Computer-Integrated Manufac-
turing, 92.
Pezzato, C., Salmi, C., Trevisan, E., Spahn, M., Alonso-
Mora, J., and Hern
´
andez Corbato, C. (2025).
Sampling-Based Model Predictive Control Leverag-
ing Parallelizable Physics Simulations. IEEE Robotics
and Automation Letters, 10(3).
Rabaetje, R. (2003). Real-time Simulation of Deformable
Objects for Assembly Simulations. In Proceedings of
the Fourth Australasian User Interface Conference on
User Interfaces 2003 - Volume 18.
Sanchez, J., Corrales, J.-A., Bouzgarrou, B.-C., and
Mezouar, Y. (2018). Robotic manipulation and sens-
ing of deformable objects in domestic and industrial
applications: a survey. The International Journal of
Robotics Research, 37(7).
Schulman, J., Lee, A., Ho, J., and Abbeel, P. (2013). Track-
ing deformable objects with point clouds. In 2013
IEEE International Conference on Robotics and Au-
tomation.
Todorov, E., Erez, T., and Tassa, Y. (2012). MuJoCo:
A physics engine for model-based control. In 2012
IEEE/RSJ International Conference on Intelligent
Robots and Systems.
Wang, C., Zhang, Y., Zhang, X., Wu, Z., Zhu, X., Jin, S.,
Tang, T., and Tomizuka, M. (2022). Offline-Online
Learning of Deformation Model for Cable Manipula-
tion with Graph Neural Networks. IEEE Robotics and
Automation Letters, 7(2).
Williams, G., Drews, P., Goldfain, B., Rehg, J. M., and
Theodorou, E. A. (2016). Aggressive driving with
model predictive path integral control. In 2016 IEEE
International Conference on Robotics and Automation
(ICRA).
Williams, G., Wagener, N., Goldfain, B., Drews, P., Rehg,
J. M., Boots, B., and Theodorou, E. A. (2017). Infor-
mation theoretic MPC for model-based reinforcement
learning. In 2017 IEEE International Conference on
Robotics and Automation (ICRA).
Yan, M., Zhu, Y., Jin, N., and Bohg, J. (2020). Self-
Supervised Learning of State Estimation for Manip-
ulating Deformable Linear Objects.
Yang, Y., Stork, J. A., and Stoyanov, T. (2022). Learning
differentiable dynamics models for shape control of
deformable linear objects. Robotics and Autonomous
Systems, 158.
Yin, H., Varava, A., and Kragic, D. (2021). Model-
ing, learning, perception, and control methods for
deformable object manipulation. Science Robotics,
6(54).
Yu, M., Lv, K., Zhong, H., Song, S., and Li, X. (2023).
Global Model Learning for Large Deformation Con-
trol of Elastic Deformable Linear Objects: An Effi-
cient and Adaptive Approach. IEEE Transactions on
Robotics, 39(1).
Yu, M., Zhong, H., and Li, X. (2022). Shape Control of
Deformable Linear Objects with Offline and Online
Learning of Local Linear Deformation Models. In
2022 International Conference on Robotics and Au-
tomation (ICRA).
Zhou, H., Li, S., Lu, Q., and Qian, J. (2020). A Practical
Solution to Deformable Linear Object Manipulation:
A Case Study on Cable Harness Connection. In 2020
5th International Conference on Advanced Robotics
and Mechatronics (ICARM). IEEE.
Zhu, J., Cherubini, A., Dune, C., Navarro-Alarcon, D.,
Alambeigi, F., Berenson, D., Ficuciello, F., Harada,
K., Kober, J., Li, X., Pan, J., Yuan, W., and Gienger,
M. (2022). Challenges and Outlook in Robotic Ma-
nipulation of Deformable Objects. IEEE Robotics and
Automation Magazine, 29(3).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
58
