
Observation-Based Inverse Kinematics for Visual Servo Control
Daniel Nikovski
a
Mitsubishi Electric Research Labs, Massachusetts, U.S.A.
Keywords:
Robotics, Learning Control, Configuration Learning, Visuomotor Policies.
Abstract:
We propose a method for estimating the joint configuration of articulated mechanisms without joint encoders
and with unknown forward kinematics, based solely on RGB-D images of the mechanism captured by a
stationary camera. The method collects a sequence of such images under a suitable excitation control policy,
extracts the 3D locations of keypoints in these images, and determines which of these points must belong
to the same link of the mechanism by means of testing their pairwise distances and clustering them using
agglomerative clustering. By computing the rigid-body transforms of all bodies with respect to the keypoints’
positions in a reference image and analyzing each body’s transform expressed relative to all other bodies’
coordinate reference frames, the algorithm discovers which pairs of bodies must be connected by a single-
degree-of-freedom joint and based on this, discovers the ordering of the bodies in the kinematic chain of the
mechanism. The method can be used for pose-based visual servocontrol and other robotics tasks where inverse
kinematics is needed, without providing forward kinematics or measurements of the end tool of the robot.
1 INTRODUCTION
Humans and animals possess remarkable abilities to
execute very complex motions based on sensory ob-
servations, starting from hunting for prey and avoid-
ing predators and ranging to precise motion such as
hitting a fast moving ball with a bat or assembling
a complex electronic device. Over the course of mil-
lions of years of evolution, one sensory modality – vi-
sion – has provided an overwhelming advantage when
performing such motions, and modern control engi-
neering and artificial intelligence (AI) have sought to
emulate computationally the abilities of living organ-
isms to interpret visual data for the purpose of direct-
ing intelligent behavior. This effort, combined with
the ever decreasing cost and increasing performance
of high-resolution cameras and compact embedded
micro-controllers, has brought about a generational
change in robotics, where rigidly-programmed robots
executing identically repeated motions are gradually
being replaced by robots that can interpret visual in-
put and adjust their motion accordingly.
However, this transition is associated with the cost
of manually developing an observer of the system
under control, employing computer vision and con-
trol engineering techniques (Szeliski, 2022; Franklin
et al., 2015). It is thus very appealing economically
a
https://orcid.org/0000-0003-2919-645X
to automate the process of constructing observers for
nonlinear systems based on visual observations. The
field of state representation learning (SRL) for control
addresses the general problem of producing compact
descriptors of the state of a dynamical system from
observation data and their use for designing control
policies (Lesort et al., 2018). Methods proposed in
the closely related field of nonlinear system identi-
fication also often construct state representations as
their byproducts (Nelles, 2020). However, general
methods in these fields, almost exclusively based on
machine learning algorithms, often suffer from very
high sample complexity, i.e., they need to see very
many training examples in order to learn a suitable
model and/or state representation, often limiting their
applicability to relatively simple systems with few in-
dependent state variables. Moreover, such methods
tend to produce state representations where the contri-
butions of the individual state variables are conflated.
This is in contrast with the traditionally hand-crafted
perception modules in AI, where a scene descriptor
is usually factored into the states of the objects the
scene consists of, or state vectors in control systems
engineering, which are similarly a concatenation of
the states of the system’s individual components.
It is thus highly desirable to be able to construct
from training data useful state representations that are
factored across a set of moving objects that exist in a
200
Nikovski, D.
Observation-Based Inverse Kinematics for Visual Servo Control.
DOI: 10.5220/0013701100003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 200-207
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

scene corresponding to a controllable system in mo-
tion. An example of such a system is an articulated
robot arm consisting of several rigid bodies (links)
connected to one another by means of joints. The
links are arranged in a kinematic chain and the joints
connecting them can be translational or rotational.
Most industrial manipulators fit this definition.
Other examples are cranes (gantry, boom, beam,
etc.) whose mechanism varies depending on what
kind of joints are used. Automatic control of in-
dustrial manipulators has been researched over many
decades (Siciliano and Khatib, 2016), and automation
of cranes has also advanced in recent years (Mojal-
lizadeh et al., 2023). Owing to their second-order
dynamics, the state of such mechanisms can be ex-
pressed as the set of joint positions (angles or dis-
placements) as well as their velocities.
Although the joint positions of many articulated
mechanisms can be measured by means of encoders,
in other cases, for example for the cables hoisting the
load of a crane, this is not feasible. An alternative is
to implement an estimator based on visual data and
it is desirable to automate this process. We propose
one such algorithm for configuration descriptor con-
struction from image data. The main insight behind
it is that if we can reliably detect and track 3D key-
points in sequences of such images, we can recover
the mechanism’s configuration much more easily than
if we were working with the raw pixels in the im-
ages. Section 2 describes the problem setting and the
assumptions about visual data we make, and section
3 describes some approaches to solving the problem.
Section 4 describes our proposed method and Section
5 presents its empirical verification. Section 6 pro-
poses future directions and concludes.
2 PROBLEM DEFINITION
We are interested in the accurate estimation of the
configuration of an articulated mechanism, such as
a robot arm, entirely from camera images, and the
use of this configuration estimate for the purposes of
control of the mechanism. The mechanism comprises
an unknown number of rigid bodies connected in a
kinematic chain via single-degree-of-freedom (DoF)
joints, whose types – either prismatic or revolute –
are not known a priori. Furthermore, the size, appear-
ance, and ordering of the rigid bodies within the chain
are also unknown, precluding direct recovery of the
mechanism’s true state. However, if a configuration
representation can be derived from visual data that is
equivalent to the true configuration – i.e., it maintains
a one-to-one correspondence – then state-based con-
trol techniques can still be employed for effective con-
trol of the mechanism.
We consider a set S of N distinctive 3D keypoints
tracked over T time steps, yielding measurements of
the form p
ik
= [x
ik
,y
ik
,z
ik
]
T
for i = 1, ..., N and k =
1,. .. ,T . The collection of keypoint measurements at
time k is denoted by the matrix P
k
= [p
ik
]
T
∈ R
N×3
.
These 3D positions can be estimated using an RGB-
D camera that captures a sequence of T frames while
the mechanism is actuated under a persistently excit-
ing control policy. Distinctive features, such as cor-
ners, are extracted from the RGB images (Szeliski,
2022), and their 3D positions are computed in the
camera frame using the corresponding depth data and
the camera’s intrinsic parameters. We do not assume
continuous visibility of all keypoints; some may be
occluded at certain time steps, resulting in missing
data. Moreover, the visible keypoints are subject to
measurement noise due to pixel quantization, lim-
ited depth resolution, and potential mechanical dis-
turbances. Finally, we assume that the number of
keypoints N significantly exceeds the number of rigid
bodies n, ensuring that each body is associated with
at least four, and preferably more, visible keypoints to
enable reliable pose estimation in the camera frame.
Given the (potentially sparse) data tensor P =
[P
k
] ∈ R
N×T ×3
, where k = 1,...,T , our objective is to
infer the underlying structure and motion of the artic-
ulated mechanism. Specifically, we aim to determine:
(i) the number of rigid bodies present in the scene;
(ii) the assignment of each of the N keypoints to their
corresponding rigid body; (iii) the pose of each body
relative to a reference pose at every time step; (iv)
the connectivity structure of the mechanism, identi-
fying which bodies are linked via single-DoF joints;
and (v) the joint configurations over time, expressed
relative to a reference joint position. The reference
body poses are defined with respect to a chosen time
step, such as the initial frame in the sequence, when
the reference joint positions are assumed to be zero.
At run time, we aim to bring the mechanism to
a goal state specified implicitly by means of an im-
age of the mechanism in the desired goal state, as
is customary in the field of visual servocontrol (VS)
(Chaumette et al., 2016). Using steps (iii) and (v)
above and the mechanism structure discovered in
steps (i), (ii), and (iv), we estimate the desired goal
joint state. Then, we control the articulated mecha-
nism by repeatedly (a) capturing an RGB-D image of
the mechanism; (b) determining the 3D positions of
the keypoints in it; (c) computing the pose of each
body with respect to the reference pose, analogously
to step (iii) in the analysis stage above; (d) comput-
ing the joint configuration at this time, again analo-
Observation-Based Inverse Kinematics for Visual Servo Control
201

gously to step (v) above; (e) computing a feedback
error with respect to the desired goal configuration, in
estimated joint space; and (f) computing a control sig-
nal based on the feedback error that aims to bring the
error to zero, using a suitable control method, such as
proportional-integral-derivative (PID) control.
3 RELATED WORK
Some deep reinforcement learning (DRL) algorithms
have achieved several successes in learning visuo-
motor control policies directly in terms of high-
dimensional observations, including camera images,
but these typically require millions of exprimental tri-
als. There do exist some DRL algorithms with ac-
ceptable sample complexity that can be trained on real
robotic hardware, but not quite matching the problem
we are interested in. For example, the Guided Policy
Search (GPS) algorithm has been able to learn control
policies for various difficult robotics tasks (Levine
et al., 2016). However, this algorithm did have ac-
cess to the true low-dimensional state of the system
to compute optimal state-based policies at training
time, later turning these policies into observation-
based ones using supervised learning. In contrast, we
do not assume access to the true state at any time.
Image-based visual servocontrol (IBVS) algo-
rithms could be very effective, but usually assume that
all features will be visible at all times, otherwise they
would fail (Chaumette et al., 2016). Another class of
VS algorithms known as pose-based visual servocon-
trol (PBVS) algorithms operate by first estimating the
current state of the mechanism from images, essen-
tially equivalent to estimating its configuration, fol-
lowed by conventional control in joint space. How-
ever, this cannot be done analytically without a kine-
matic model of the mechanism and knowledge of how
it would look like in different configurations. An al-
ternative is to apply SRL to learn compact represen-
tations of the controlled system, including articulated
mechanisms, and use these representations for vari-
ous control and decision-making tasks, such as VS for
goal-reaching behavior, reinforcement learning, and
imitation learning (Lesort et al., 2018). How to per-
form SRL reliably and efficiently is thus a key prob-
lem in the field of robot learning.
Deep neural networks (DNNs) with a bottleneck
layer can be trained to mimic their input, forcing
them to compress the high-dimensional observations
into a compact state descriptor. The resulting Spa-
tial Autoencoders (SAE) and dynamic models have
been used in learning control policies on real robots
(Finn et al., 2016; Jonschkowski and Brock, 2015;
Wahlstr
¨
om et al., 2015). However, this approach has
turned out difficult to scale up to systems with more
DoFs due to the quickly increasing sample complex-
ity, a common issue for DNNs. It also reflects the
combinatorial explosion of possible configurations as
the number of joints in the mechanism increases; sam-
pling the configuration space exhaustively is corre-
spondingly computationally demanding.
One possible solution to handling this complex-
ity is to leverage the decomposability of mechanisms
(and natural scenes, in general) into independent ob-
jects whose pose can be estimated independently. It
can be surmised that naturally intelligent humans and
animals have a built-in inductive bias towards learn-
ing object-centric representations of the world, and
general-purpose SRL method lack this bias. Recent
work in SRL has focused on object-centered SRL,
such as the Slot Attention for Video (SAVi) algorithm
introduced in (Kipf et al., 2021). It processes se-
quences of images and extracts features essential for
object tracking and representation. However, learning
these features typically demands large datasets and is
highly sensitive to the initial configuration of the neu-
ral network, particularly its convolutional filters.
4 OBSERVATION-BASED
INVERSE KINEMATICS AND
CONTROL OF MECHANISMS
The difficulties associated with DNN-based SRL
methods prompt the question of whether neural net-
works – with their long training times, high sample
complexity, and imperfect reliability – are even nec-
essary. Instead, we propose feeding the SRL algo-
rithm not with raw image pixels, but with the spa-
tial coordinates of a set of corresponding keypoints
across images. By analyzing the relative motion of
these keypoints over time, the method statistically de-
termines which keypoints belong to the same rigid
body, estimates object poses in the camera frame, and
infers the kinematic chain structure. The result is a
compact representation of the mechanism’s configu-
ration, equivalent to a vector of joint positions. We
can think of the mapping from images to configura-
tions as a form of observation-based inverse kinemat-
ics (OBIK). Combined with joint-space control algo-
rithms, this results in a new PBVS method that re-
quires neither prior knowledge of the mechanism’s
kinematics, nor measurements of joint angles or end-
tool position by means of sensors, thus eliminating
the cost of such sensors from the cost of the entire
system. The steps of the method are described below.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
202

4.1 Assignment of Points to Rigid
Bodies
The algorithm begins by identifying the number of
distinct moving bodies present in the scene — includ-
ing the static background – and assigning each point
uniquely to one of these bodies. This is a task of-
ten performed in Structure from Motion (SfM) esti-
mation (Szeliski, 2022). The general approach is to
test whether pairs of points maintain a constant dis-
tance over time – a hallmark of rigid motion – and
cluster the full set of N points into groups where each
pair within a group satisfies the rigid body assumption
(RBA) between them.
To implement this approach, we require a dissim-
ilarity metric for each pair of points that captures the
extent to which the Euclidean distance between them
violates the RBA. A viable option for this metric is the
variance of the distance D
i j
between the two points
p
i
and p
j
. Assuming the presence of measurement
noise, this distance can be treated as a random vari-
able. Its mean
¯
d
i j
and sample variance s
2
i j
can be com-
puted using data from the time steps during which
both points are observable, as indicated by the indi-
cator variables o
ik
, which are equal to 1 if point i is
observable at time k and 0 otherwise:
d
i jk
=
(
p
ik
− p
jk
if (o
ik
= 1) ∧ (o
jk
= 1)
undefined otherwise
(1)
T
i j
=
T
∑
k=1
o
ik
o
jk
¯
d
i j
=
1
T
i j
T
∑
k=1
o
ik
=1
o
jk
=1
d
i jk
(2)
s
2
i j
=
1
T
i j
− 1
T
∑
k=1
o
ik
=1
o
jk
=1
(d
i jk
−
¯
d
i j
)
2
(3)
To estimate the variances s
2
i j
, the distance between
each pair of points must be measured at least twice.
Therefore, if the condition ∀ j,T
i j
≥ 2 is not met for a
given point i, that point is excluded from the set.
However, the sample variance does not lie within
a uniform interval, but can vary significantly depend-
ing on the range of motion of bodies in the scene,
thus potentially confusing clustering algorithms. A
more effective dissimilarity metric may be obtained
by framing the problem as one of statistical hypoth-
esis testing. The goal is to test whether the distance
between two points – treated as a random variable –
is not constant, meaning its variance is significantly
greater than what would be expected from measure-
ment noise alone. A suitable method for comparing
variances is the F-test. To apply this test, we need
an estimate of the measurement noise variance σ
2
noise
.
This can be obtained either from the camera’s specifi-
cations or experimentally, by measuring the variation
of keypoints’ positions in a completely static scene.
The F-test is conducted by setting up a null hy-
pothesis H
0
that the variance σ
2
i j
= σ
2
noise
, and an alter-
native hypothesis H
A
that σ
2
i j
> σ
2
noise
. This is a one-
sided F-test, as the true variance σ
2
i j
can only be equal
to or greater than the noise variance σ
2
noise
– the latter
serving as the Cram
´
er-Rao lower bound for the for-
mer – so it is not physically meaningful for σ
2
i j
to be
smaller. (Although the observed sample variance s
2
i j
may occasionally fall below σ
2
noise
, such cases clearly
indicate a constant distance.)
The F-statistic is calculated as F
i j
= s
2
i j
/σ
2
noise
,
which follows an F-distribution with degrees of free-
dom (T
i j
− 1,T
i j
− 1). The corresponding p-value is
given by p = Pr(F > F
i j
) = 1 − CDF(F
i j
), where
CDF(·) denotes the cumulative distribution function
of the F-distribution. This p-value represents the
probability of observing such a high F-statistic under
the assumption that H
0
(i.e., the points belong to the
same object) is true. A low p-value (below a chosen
threshold) leads to rejection of the null hypothesis in
favor of the alternative H
A
, suggesting that the points
likely belong to different objects.
However, for our application, we do not need to
select a specific confidence level. Instead, we use the
complement of the p-value, q
i j
= 1 − p = CDF(F
i j
),
as the dissimilarity metric between points i and j for
clustering purposes. This measure typically ranges
from around 0.5 (when s
2
i j
≈ σ
2
noise
and thus F
i j
≈ 1)
to values approaching 1 (when F
i j
≫ 1). This more
consistent scaling facilitates the clustering of points
into distinct objects.
4.2 Clustering of Keypoints
Clustering can then be performed using a suitable al-
gorithm that accepts a dissimilarity matrix as input.
A good choice is agglomerative clustering (Murtagh
and Contreras, 2012), with complete linkage, because
if a subset of points correspond to the same object,
the RBA must hold between each pair of them. Let
S
l
, for l = 1, ˆn
0
, denote the resulting clusters (subsets)
of points from the original set S, and let N
l
= |S
l
| be
the number of points in cluster l. Clusters with N
l
< 4
are discarded, as they are insufficient for estimating
the pose of the associated object. The number ˆn of re-
maining clusters then serves as an estimate of the true
number n of rigid bodies in the scene, including the
static background.
Observation-Based Inverse Kinematics for Visual Servo Control
203

4.3 Configuration Estimation
Once the points have been grouped into clusters of
size at least 4, we can estimate the relative poses of
the identified bodies with respect to a reference con-
figuration, defined by the measured positions of the
points at a chosen reference time frame. Let these
reference positions be denoted by p
i0
= [x
i0
,y
i0
,z
i0
]
T
,
and let P
0
= [p
i0
]
T
∈ R
N×3
for i = 1, .. ., N.
Define P
l0
= [p
0i
]
N
l
i=1
= [[x
0i
,y
0i
,z
0i
]
T
]
N
l
i=1
as the
matrix of reference positions for the points in cluster
l, and P
lk
= [p
ik
]
N
l
i=1
= [[x
ik
,y
ik
,z
ik
]
T
]
N
l
i=1
as the matrix
of positions for the same points at time k, with each
column representing a point. We can estimate the
rigid body transformation (RBT) that best aligns P
l0
to P
lk
in the least-squares sense: p
ik
≈ R
lk
p
i0
+t
lk
, i =
1,. .. ,N
l
, where R
lk
is a 3×3 rotation matrix and t
lk
is
a 3 × 1 translation vector. This can be achieved using
Procrustes superimposition via the Kabsch-Umeyama
algorithm (Umeyama, 1991).
By applying this procedure to each cluster, we ob-
tain a set of ˆn rigid body transformations that fully
describe the configuration of the mechanism. This
set can serve as a compact configuration descriptor,
significantly lower in dimensionality than the origi-
nal RGB-D images or keypoints from which it was
derived, making it suitable for tasks such as monitor-
ing and control. However, this representation is not
minimal, requiring 6 ˆn numbers, whereas the true con-
figuration is described by only ˆn joint positions.
The computed RBTs for each identified rigid body
can be further analyzed to infer the underlying kine-
matic structure of the mechanism and to construct a
more compact configuration descriptor. When two
bodies are adjacent in a kinematic chain and con-
nected by a single-DoF joint, their relative RBT will
also exhibit only one DoF – either translational or
rotational. Recall that the RBTs obtained so far
are expressed relative to a reference pose defined by
the point set P
l0
, all in the inertial (camera) frame.
The relative pose of object m can be expressed in-
stead with respect to object l at time k, and denoted
as
l
R
mk
. The relative rotation satisfies the relation
R
mk
= R
lk
l
R
mk
, where leading superscripts indicate
the frame in which the rotation is expressed, and the
absence of such superscript indicates the world (here,
camera) frame, yielding
l
R
mk
= R
T
lk
R
mk
. Similarly, the
relative translation is given by
l
t
mk
= R
T
lk
(t
mk
−t
lk
).
These relative poses are instantaneous, for time
step k. To determine the number of DoFs between
two bodies, we can analyze how their relative pose
evolves over time. If the relative position or orienta-
tion remains constant (within tolerance), it indicates
zero translational or rotational DoF, respectively.
To infer translational DoFs, we examine the rank
of the 3 × T matrix T
lm
= [
l
t
m1
l
t
m2
.. .
l
t
mT
]. If body
m moves translationally with respect to body l along a
fixed axis (as in a prismatic joint), each relative trans-
lation
l
t
mk
should lie along the same line in R
3
, im-
plying that rank(T
lm
) = 1. This can be detected us-
ing singular value decomposition (SVD) on T
lm
. (It is
important to note that rank(T
lm
) = 1 also holds when
the relative position is constant, but not zero (meaning
zero translational DoF), so this case must be identified
beforehand to avoid misinterpretation.)
Detecting a single rotational DoF is more chal-
lenging, for two reasons. First, rotation matrices do
not naturally lend themselves to rank-based analysis.
Second, even when only one rotational DoF exists,
the associated translation component of the RBT is
typically non-zero. Unlike translations, rotations be-
long to the special orthogonal group SO(3), which
is a curved manifold embedded in R
3×3
, not a lin-
ear space, so PCA cannot be applied. However, if
the rotation is represented in axis-angle form, r = θω,
where θ is the rotation angle and ω is the rotation axis,
PCA can be applied.
Once the relative rotation matrices
l
R
mk
are con-
verted to axis-angle vectors
l
r
mk
, we construct the
3 × T matrix R
lm
= [
l
r
m1
l
r
m2
.. .
l
r
mT
]. If body m
rotates relative to body l about a fixed axis (as in a
revolute joint), then all
l
r
mk
vectors lie along the same
line in R
3
, implying rank(R
lm
) = 1. This can again be
verified using SVD.
However, even when only a single rotational DoF
exists and no translational DoFs are present, the es-
timated RBTs may still exhibit non-zero translations
l
t
mk
. This occurs because the body does not rotate
about the centroid of its keypoints, but about a sepa-
rate pivot point. To address this, we estimate the ef-
fective center of rotation and test whether it remains
consistent over time.
The effective center of rotation t
′
lk
satisfies the
equation t
lk
= (R
lk
− I
3
)t
′
lk
when there is some rota-
tion, that is R
lk
̸= I
3
. Therefore, we can estimate the
center of rotation t
′
lk
by solving the equation t
lk
= At
′
lk
,
A = R
lk
− I
3
for t
′
lk
. Since rank(A) = 2 (as R
lk
, be-
ing an odd-dimensional rotation matrix, always has
one eigenvalue equal to 1), we solve using the Moore-
Penrose pseudoinverse:
ˆ
t
′
lk
= A
+
t
lk
. Any point of the
form
ˆ
t
′
lk
+ λ
k
ω
l
(where ω
l
is the rotation axis) is also
a valid center of rotation. If ω
l
is constant, all
ˆ
t
′
lk
lie on a line in R
3
. Therefore, this condition can be
identified by examining the dimensionality of the esti-
mated centers of rotation
ˆ
t
′
lk
over time. Since the line
along which these estimates lie does not necessarily
pass through the origin, we construct the data matrix
ˆ
T
′
lm
= [
l
ˆ
t
′
m1
−τ
l
ˆ
t
′
m2
−τ . ..
l
ˆ
t
′
mT
−τ], where each
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
204
column represents the direction of a rotation center
estimate relative to a reference point τ =
l
ˆ
t
′
ma
, chosen
arbitrarily for some a such that 1 ≤ a ≤ T . We then
perform SVD on T
lm
, R
lm
, and
ˆ
T
′
lm
for all l = 0, .. ., ˆn
and m = 0, .. ., ˆn, where frame 0 is the camera frame.
Let F be a symmetric matrix with entries f
lm
rep-
resenting the number of relative DoFs between each
pair of bodies. The structure of the kinematic chain
can be inferred from F. If f
0l
= 0, then body l is static
and part of the background. If f
0l
1
= 1, then l
1
is the
first link in the chain. If f
l
1
l
2
= 1 for some l
2
, then l
2
is
the second link, and so on. This process continues un-
til the full chain [l
1
,l
2
,. .. ,l
ˆn
] is recovered. A similar
approach can be extended to identify kinematic trees.
5 EMPIRICAL VERIFICATION
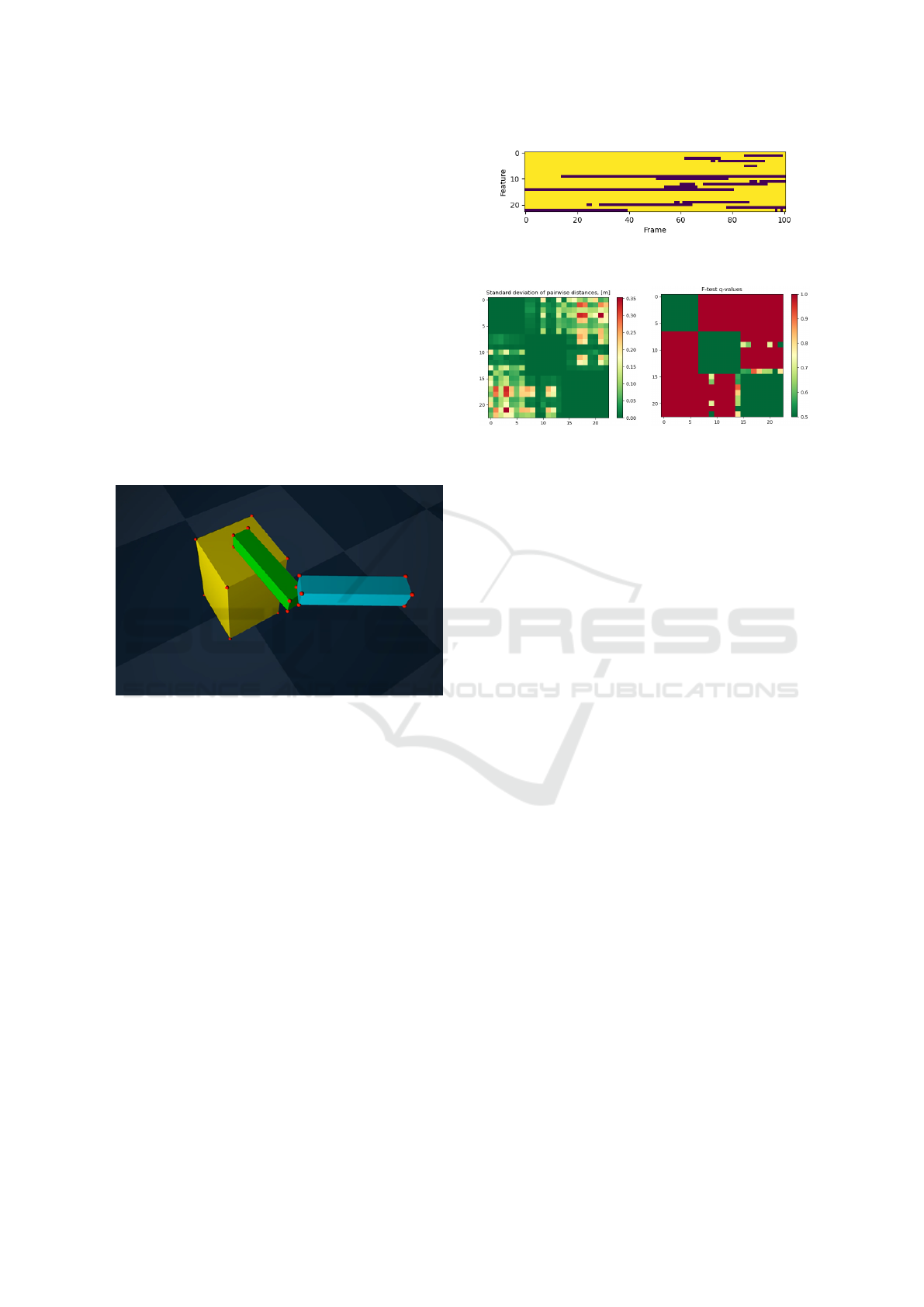
Figure 1: A 2-DoF arm on a base with keypoints (red dots)
simulated and tracked by MuJoCo over 100 steps.
We conducted an empirical verification of the pro-
posed algorithm using a simulated robot arm with
two revolute joints in the MuJoCo physics engine
(Todorov et al., 2012) (see Fig. 1). To isolate the
algorithm’s performance from that of a feature track-
ing system, we directly extracted the 3D positions of
23 keypoints (marked as red dots) from the simulator.
These keypoints were placed at the vertices of three
rigid bodies in the scene – the base and two links.
MuJoCo’s RGB-D rendering capabilities were used
to determine the visibility of each keypoint from the
camera’s perspective at each time step. The robot arm
was actuated by applying constant torques to its joints
over a sequence of T = 100 control steps at a rate of
30 Hz, causing the links to complete approximately
one full rotation each. The resulting keypoint visibil-
ity matrix over time is shown in Fig. 2.
The rigid body identification phase involved an-
alyzing the pairwise distances between all keypoint
pairs. Figure 3 shows the standard deviations of these
Figure 2: Visibility matrix of keypoints over time (yellow if
visible, dark brown if not).
Figure 3: Standard deviations of all pairwise distances (left)
and their associated q-values (right).
distances, along with the corresponding q-values ob-
tained from the F-test, after introducing measurement
noise of 1 mm. The results indicate that the F-test pro-
vides more uniform, robust, and discriminative dis-
similarity metrics compared to raw distance variance.
Dendrograms resulting from agglomerative clus-
tering with complete linkage using the two dissimilar-
ity metrics are shown in Figs. 4 and 5, respectively.
Both metrics do allow the successful identification of
three well separated clusters that match exactly the
ground truth (the point indices at the horizontal axis),
but this process is much easier with the q-values than
with standard deviations. To produce flat clustering
from the dendrogram, the latter needs to be cut at a
desired dissimilarity threshold. If standard deviations
are used, any threshold between slightly above σ
noise
and 0.19 would produce the correct number of clus-
ters (three). However, any threshold higher than that
would result in two clusters only, merging the points
for the two links. Thus, the correct threshold de-
pends on the range of motion of the rigid bodies in the
scene, making it difficult to determine entirely from
collected data. In contrast, the q-values lie in a stan-
dard range, where points that satisfy the RBA end up
having dissimilarity around 0.5, and those that do not,
end up with dissimilarity very close to 1. This makes
it very easy to use a standard, domain-independent
threshold for producing flat clustering, for example
0.8. Note also that the two points from the first link
that are also somewhat close to some of the points
in the second link do not present any problem for
the clustering algorithm, as they are still closer to the
points in the first link, so they are grouped with them,
and later the high dissimilarity of those other points
to the points in the second link prevent an incorrect
merger of the two clusters.
Observation-Based Inverse Kinematics for Visual Servo Control
205
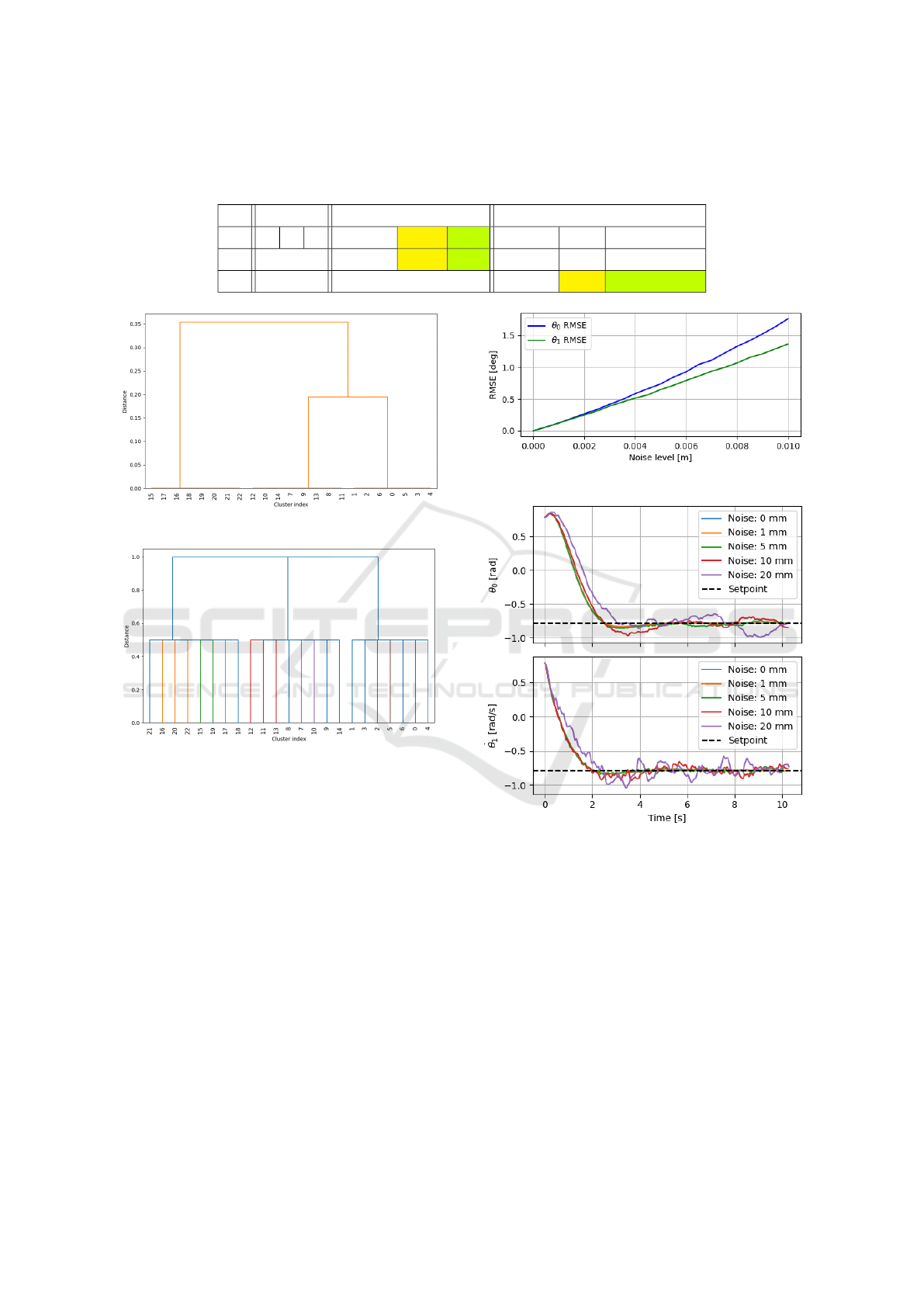
Table 1: Non-zero singular values of transform matrices between pairs of body frames. F
0
is the world frame and frames F
l
,
l = 1,2,3 are the frames attached to each of the three discovered rigid bodies. Each table entry shows singular values for the
translational, rotational, and center-of-rotation estimates for the relative RBTs. Colored cells indicate a single DoF.
F
1
F
2
F
3
F
0
- - - 2.9, 1.5 18.9 1.2 4.4, 3.1 19.6 10.2, 2.0, 0.4
F
1
2.9, 1.5 18.9 1.3 3.2, 2.8 19.6 10.1, 2.0, 0.4
F
2
6.0, 0.4 8.9 1.1
Figure 4: Dendrogram using standard deviations.
Figure 5: Dendrogram using q-values.
In the configuration construction phase, the ranks
of the matrices T
lm
and R
lm
were computed for l =
0,1, 2 and m = l + 1,...,3, with the results summa-
rized in Table 1. Since no translational or rotational
degrees of freedom were detected between bodies 1
(the base) and 0 (the world frame), it can be concluded
that the base remains stationary. A single rotational
DoF was identified between bodies 1 and 2, indicating
that body 2 (the first link) rotates relative to the base.
The presence of two translational DoFs between body
2 and both the world and base frames is explained by
the fact that body 2 rotates around the end of the first
link, tracing an arc in a plane – kinematically equiva-
lent to 2D translation. This confirms that the second
link is not directly connected to either the world or the
base via a joint. However, when analyzing the DoFs
of body 2 relative to the frame of body 1, the detec-
tion of a single rotational DoF confirms the presence
of a revolute joint between the first and second links.
Figure 6: RMSE of joint angle estimates.
Figure 7: Joint angles under PBVS using OBIK with vari-
ous levels of noise.
Because digital cameras have finite resolution,
a key question concerning the use of the proposed
method in practice is how quantization and other
measurement errors of the 3D positions of keypoints
would affect the accuracy of estimating the joint an-
gles of the mechanism. To investigate this empir-
ically, zero-mean Gaussian noise with various stan-
dard deviations was added to the keypoints’ 3D posi-
tions and the resulting estimates of joint angles were
compared with the true values reported by the simula-
tor. The root mean-squared error (RMSE) of the esti-
mates is shown in Fig. 6, averaged over 100 random-
number seeds. The error is less than 0.02
o
with noise-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
206

free keypoint position measurements, and grows only
slightly faster than linearly with the level of keypoint
noise. For measurement error of 1 mm, joint angle es-
timation error on the order of 0.21
o
can be expected.
This suggests that the proposed method, although cer-
tainly not as accurate as dedicated angular encoders
on the joints, could be used for configuration estima-
tion for the purposes of controlling the mechanism.
Ultimately, the most important question is how
measurement noise in the 3D positions of keypoints
affects the performance of a PBVS controller using
the proposed OBIK scheme for configuration esti-
mation. To investigate this, a proportional-derivative
(PD) controller was applied to the 2-DOF mechanism
with the objective of moving it from initial configura-
tion (π/4, π/4) to goal configuration (−π/4,−π/4).
The PD controllers for the two joints were indepen-
dent, with proportional gains K
p1
= K
p2
= 1 and
derivative gains K
d1
= 1 and K
d2
= 0.5 for links 1 and
2, respectively. The keypoint positions corresponding
to the goal configuration were used as reference for
the OBIK method, meaning that the PBVS PD con-
troller was essentially trying to bring the estimated
joint configuration to the origin, subject to measure-
ment noise in the keypoint positions at each control
step. Joint angle trajectories for the true angles of
both joints, as recorded by the physics engine, are
shown in Fig. 7 for several levels of measurement
noise. The controller reaches the setpoint reliably and
smoothly even for significant noise, as high as 20 mm.
For noise on the order of 5 mm, which is already more
than what is typical of modern RGB-D cameras, even
in the depth dimension, the joint trajectories are vir-
tually indistinguishable from those corresponding to
when no measurement noise is present.
6 CONCLUSION AND FUTURE
WORK
We introduced a method for learning compact repre-
sentations of the configuration of articulated mecha-
nisms from sequences of keypoint positions tracked
in camera images. The approach relies on analyz-
ing temporal variations in pairwise distances between
keypoints to statistically determine which ones satisfy
the RBA, thereby identifying groups that belong to
the same rigid body. By examining the rank of matri-
ces that capture the translational and rotational com-
ponents of estimated poses over time, the algorithm
infers the kinematic chain and the types of joints in it.
The constructed configuration vector is as compact as
that of the actual joint positions, effectively function-
ing as a joint observer without requiring prior knowl-
edge of the mechanism’s kinematics or appearance.
In future work, we aim to apply this observer to
real-time monitoring and control of robotic systems
and other articulated mechanisms. We also plan to in-
vestigate its robustness to noise and keypoint tracking
errors, as in a real environment, changes in illumina-
tion and color, as well as lack of texture can lead to
false matches and imprecise measurements.
REFERENCES
Chaumette, F., Hutchinson, S., and Corke, P. (2016). Visual
servoing. Handbook of Robotics, pages 841–866.
Finn, C., Tan, X. Y., Duan, Y., Darrell, T., Levine, S., and
Abbeel, P. (2016). Deep spatial autoencoders for vi-
suomotor learning. In 2016 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
512–519. IEEE.
Franklin, G. F., Powell, J. D., Emami-Naeini, A., and Pow-
ell, J. D. (2015). Feedback control of dynamic systems.
Prentice hall Upper Saddle River.
Jonschkowski, R. and Brock, O. (2015). Learning state rep-
resentations with robotic priors. Autonomous Robots,
39:407–428.
Kipf, T., Elsayed, G. F., Mahendran, A., Stone, A., Sabour,
S., Heigold, G., Jonschkowski, R., Dosovitskiy, A.,
and Greff, K. (2021). Conditional object-centric learn-
ing from video. arXiv preprint arXiv:2111.12594.
Lesort, T., D
´
ıaz-Rodr
´
ıguez, N., Goudou, J.-F., and Filliat,
D. (2018). State representation learning for control:
An overview. Neural Networks, 108:379–392.
Levine, S., Finn, C., Darrell, T., and Abbeel, P. (2016). End-
to-end training of deep visuomotor policies. Journal
of Machine Learning Research, 17:1–40.
Mojallizadeh, M. R., Brogliato, B., and Prieur, C. (2023).
Modeling and control of overhead cranes: A tutorial
overview and perspectives. Annual Reviews in Con-
trol, 56:100877.
Murtagh, F. and Contreras, P. (2012). Algorithms for hierar-
chical clustering: an overview. Wiley Interdisciplinary
Reviews: Data Mining, 2(1):86–97.
Nelles, O. (2020). Nonlinear dynamic system identification.
Springer.
Siciliano, B. and Khatib, O. (2016). Springer handbook of
robotics. Springer International Publishing.
Szeliski, R. (2022). Computer vision: algorithms and ap-
plications. Springer Nature.
Todorov, E., Erez, T., and Tassa, Y. (2012). MuJoCo: A
physics engine for model-based control. In Interna-
tional Conference on Intelligent Robots and Systems,
pages 5026–5033. IEEE.
Umeyama, S. (1991). Least-squares estimation of transfor-
mation parameters between two point patterns. IEEE
Transactions on Pattern Analysis & Machine Intelli-
gence, 13(04):376–380.
Wahlstr
¨
om, N., Sch
¨
on, T. B., and Deisenroth, M. P. (2015).
Learning deep dynamical models from image pixels.
IFAC-PapersOnLine, 48(28):1059–1064.
Observation-Based Inverse Kinematics for Visual Servo Control
207
