
Space-Filling Regularization for Robust and Interpretable
Nonlinear State Space Models
Hermann Klein
a
, Max Heinz Herkersdorf
b
and Oliver Nelles
c
University of Siegen, Department Mechanical Engineering, Automatic Control – Mechatronics,
Paul-Bonatz-Str. 9-11, 57068 Siegen, Germany
Keywords:
Nonlinear System Identification, State Space Models, Regularization, Local Model State Space Network,
Space-Filling.
Abstract:
The state space dynamics representation is the most general approach for nonlinear systems and often chosen
for system identification. During training, the state trajectory can deform significantly leading to poor data
coverage of the state space. This can cause significant issues for space-oriented training algorithms which
e.g. rely on grid structures, tree partitioning, or similar. Besides hindering training, significant state trajectory
deformations also deteriorate interpretability and robustness properties. This paper proposes a new type of
space-filling regularization that ensures a favorable data distribution in state space via introducing a data-
distribution-based penalty. This method is demonstrated in local model network architectures where good
interpretability is a major concern. The proposed approach integrates ideas from modeling and design of
experiments for state space structures. This is why we present two regularization techniques for the data point
distributions of the state trajectories for local affine state space models. Beyond that, we demonstrate the
results on a widely known system identification benchmark.
1 INTRODUCTION
Models of dynamic systems are the base for numerous
industrial applications, especially for control design
or virtual sensing. Insofar as white box models de-
rived from physical principles oftentimes fail to meet
an acceptable tradeoff between modeling effort and
accuracy, data-driven model learning, also known as
system identification, comes into play. Here, the user
can choose between different mathematical architec-
tures to describe the system’s dynamics. A state space
representation is the most abstract and general kind
as well as required for many control design methods.
Examples of alternative approaches are feedforward-
trained models like finite impulse response or non-
linear autoregressive models with exogenous input or
output feedback-trained kinds like output error mod-
els (Ljung, 1999). In comparison to the latter and es-
pecially for the nonlinear case, the state space model
is a more powerful modeling approach due to its inter-
nal state feedback (Belz et al., 2017; Sch
¨
ussler et al.,
2019).
a
https://orcid.org/0009-0009-5386-3575
b
https://orcid.org/0009-0007-8554-8153
c
https://orcid.org/0000-0002-9471-8106
Whereas linear state space models can be ex-
tracted from frequency domain approaches with sub-
space identification (Pintelon and Schoukens, 2012;
Van Overschee and De Moor, 1995), nonlinear mod-
els have to be trained via nonlinear optimization with
the objective of simulation error fit. They gener-
ally arise when the linear state and output functions
are replaced with nonlinear function approximators.
Here, various approaches exist, including polynomi-
als (Paduart et al., 2010) or neural networks (Suykens
et al., 1995; Forgione and Piga, 2021). Due to local
interpretability and explainability reasons, we focus
on the class of local affine state space models. Math-
ematically related architectures are (softly switching)
piecewise affine (Garulli et al., 2012), Takagi Sugeno
(TS) or quasi-Linear Parameter Varying (qLPV) state
space models (Rotondo et al., 2015).
In general, system identification tries to find
an accurate model based on input/output training
datasets (Ljung et al., 2020). As a consequence, an
immanent feature of nonlinear state space models is
the implicit optimization of the model’s state, since it
depends on trainable parameters. Due to the simula-
tion error fit, the state is optimized indirectly. In ge-
ometrical terms, deformations of the trajectories can
Klein, H., Herkersdorf, M. H. and Nelles, O.
Space-Filling Regularization for Robust and Interpretable Nonlinear State Space Models.
DOI: 10.5220/0013698800003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 409-416
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
409

be observed within the optimization procedure. This
can be visualized in the phase plot of the state vari-
ables’ trajectories, at least for the two-dimensional
projection
1
. The point distribution in the state space is
manipulated until the termination of the optimization.
For TS models, the effects on the state trajectory can
be connected with local regions. This interaction can
affect robustness and interpretability and is addressed
in this contribution.
As a first try, any system identification task can
be challenged with a pure data-driven (black box) ap-
proach. In such a setting, the state space model is
fully parametrized including redundant parameters. A
common technique in estimation theory is to use regu-
larization by application of an additional penalty term
to the objective function (Boyd and Vandenberghe,
2004). In the context of nonlinear state space mod-
eling, recent work deals with L1 regularization for
black box models (Bemporad, 2024). Moreover, Liu
et al. (2024) use regularization to make a black-box
state meet a physical-interpretable state realization.
An overview on methods for nonlinear systems can
e.g. be found in Pillonetto et al. (2022).
As mentioned above, the interaction of the data
point distribution with local activation functions is
crucial for models with regional organization, like the
Local Model State Space Network (LMSSN). As a
consequence, we develop a space-filling regulariza-
tion for the LMSSN procedure. This transfers ideas
from the Design of Experiments into model training.
The novelty of this contribution is the development of
a space-filling penalty term. We analyze it in detail
and compare two related regularization techniques.
The article is organized as follows. In Section 2,
we present the LMSSN-based modeling procedure.
Next, we present the evolution of the space-filling
indicators within the optimization procedure in Sec-
tion 3. The effect of a space-filling penalty term is
presented in Section 4. Our method is tested on a
benchmark process in Section 5. Finally, we summa-
rize our work and give an outlook on future lines of
research.
2 NONLINEAR STATE SPACE
MODELING
The proposed method is suitable for all state space
models in which the state explores an a priori known
range. Since we focus on the LMSSN method, its
functionality is introduced in this section. This un-
1
For simplicity, the phase plot of the state variables is
designated as the state trajectory in this paper.
regularized version serves as a reference for recent
advancements regarding space-filling regularization.
2.1 Local Model State Space Network
LMSSN is a system identification method to create
discrete-time nonlinear state space models. The math-
ematical model architecture embeds Local Model
Networks (LMNs) in a state space framework.
LMSSN modeling results in local affine state space
models, weighted with normalized radial basis func-
tions (NRBF). Detailed information can be found
in Sch
¨
ussler (2022). It is emphasized that LMSSN
differs from TS and qLPV approaches in the use of
the Local Linear Model Tree (LOLIMOT). The tree-
construction algorithm serves for the determination
of the fuzzy premise variables (or scheduling vari-
ables in qLPV terms). Additionally, it uses a heuris-
tic axis-orthogonal input space partitioning approach
by automatic parametrization of the validity func-
tions. For more information about LOLIMOT, we re-
fer to Nelles (2020).
The resulting LMSSN model is formulated with
the following equations,
ˆx(k + 1) =
n
LM,x
∑
j=1
(A
j
ˆx(k) + b
j
u(k) + o
j
) ◦ Φ
[x]
j
(k)
ˆy(k) =
n
LM,y
∑
j=1
(c
⊤
j
ˆx(k) + d
j
u(k) + p
j
) ◦ Φ
[y]
j
(k).
(1)
For the single-input single-output case (n
u
=1 input
and n
y
=1 output variable), the tensors A
j
∈ R
n
x
×n
x
,
b
j
∈ R
n
x
, o
j
∈ R
n
x
, c
j
∈ R
n
x
, d
j
∈ R and p
j
∈ R
are filled with the slopes and offsets of the j-th lo-
cal affine model (LM). The dynamical order is ex-
pressed by the number of state variables n
x
and the
discrete-time is indicated with k. In configuration (1),
there are altogether n
LM,x
superposed affine models
for the state ˆx(k + 1) and n
LM,y
for the output ˆy(k).
The basis functions Φ
[x]
j
and Φ
[y]
j
express the j-th local
validity function. Since they are implemented with
normalized Gaussians, the partition of unity holds,
∑
n
LM,x
j=1
Φ
[x]
j
= 1 and
∑
n
LM,y
j=1
Φ
[y]
j
= 1.
Due to the design of LMSSN in state space form,
the parameter initialization can be done determinis-
tically with a global linear state space model. The
latter is gathered as the Best Linear Approximation
(BLA) of the process in the frequency domain (McK-
elvey et al., 1996). Next, subspace-based identifica-
tion converts the nonparametric frequency response
function model into a parametric linear state space
model. The fully-parametrized discrete-time model is
then transformed into a balanced realization via a sim-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
410

ilarity transformation (Verriest and Kailath, 1983; Lu-
enberger, 1967). It evokes a diagonal structure within
the state space matrices which leads to a state real-
ization with an evenly (and thus desired) trajectory
shape.
After the linear model initialization, the
LOLIMOT algorithm starts. With the help of
the stepwise addition of weighted LMs, it enables
for nonlinear curve approximation. Each LM is
connected with a region of activation in the extended
input/state space ˜u = [ ˆx,u]
T
. This corresponds to the
partition of ˜u with interpolation regimes for smooth
cross-fading in between. It can be seen as a genera-
tion of splits of ˜u, arranged by center placement of the
NRBFs. If every dimension of ˜u is to be analyzed in
form of a split, n
Split
=dim(˜u) split options arise. For
the ease of the center placement, it is intuitive to scale
the state trajectory into a fixed interval, preferably
the unit cube. The scaling is actualized with an affine
scaling transformation, parametrized with range and
offset values according to minimum and maximum of
ˆx. The procedure is called split-adaption algorithm
according to Sch
¨
ussler et al. (2019). Each LOLIMOT
iteration investigates all n
Split
options for the region
with the largest error separately via an optimization
run.
2
2.2 Problem Statement
The loss function J being minimized in each
LOLIMOT iteration is the sum of the squared output
errors. For a one-dimensional output variable, the op-
timization problem is stated as
min
θ
J(θ ) = min
θ
N
∑
k=1
y(k) − ˆy(k; θ )
2
s.t. ˆx(k + 1) = LMN(ˆx(k), u(k); θ
[x]
)
ˆy(k) = LMN( ˆx(k), u(k); θ
[y]
),
(2)
where θ is the vector of all model parameters and N
is the number of samples collected for training. The
nonlinear problem is solved with a Quasi-Newton op-
timizer with BFGS Hessian approximation. The op-
timization is run till convergence in a local minimum
terminating on a loss and gradient tolerance or mini-
mal step size.
By fitting the parameters according to the min-
imization of the output error, the state trajectory
changes its shape from the balanced realization to
the one that is most effective for the objective (2).
Next, we show a possible consequence on the state
2
Note the LOLIMOT iterations have to be distinguished
from the gradient-based iterations within the nonlinear op-
timization of each split option.
trajectory for the first split of a simulated second-
order single-input single-output system with nonlin-
ear feedback,
¨y(t) + a
1
˙y(t) + a
0
f (y(t)) = b
0
u(t), (3)
with the parameter values a
0
=b
0
=15 and a
1
=3. The
nonlinear feedback f (y) is arranged with a smooth ex-
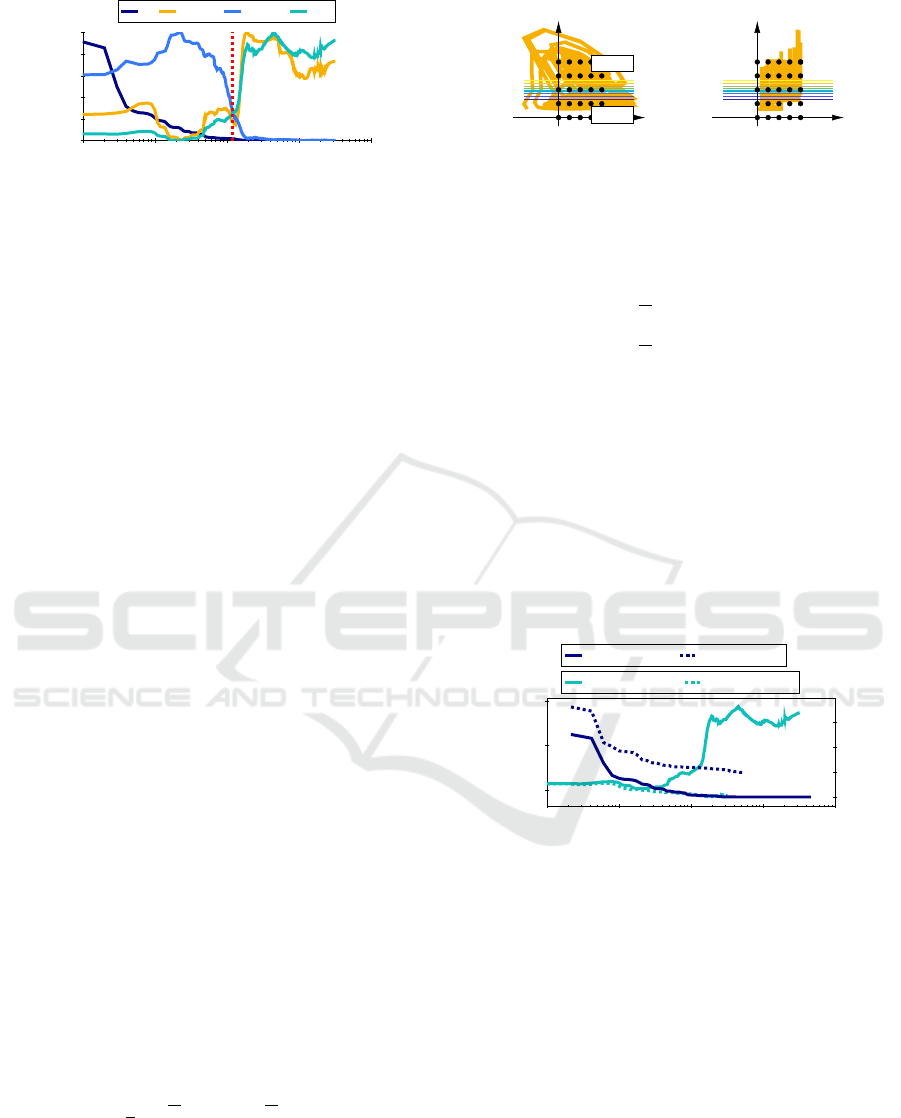
ponentially rising curve. Figure 1 demonstrates that
the initial state trajectory was within the unit cube,
whereas the optimized one is compressed. Obviously,
the nonlinear behavior of the process can be captured
although no data point is fully active in the upper
LM. Nevertheless, LM2 influences the data points via
smooth cross-fading of both LMs in the interpolation
regime. The shown behavior causes problems regard-
ing interpretation. Furthermore, the effect is accom-
panied by robustness problems. Large local parameter
values of LM2 are necessary to influence data, which
are located in the lower LM1. With the help of the
maximum absolute value of the eigenvalues µ
i
of the
local state transition matrices,
A
LM, j
=
a
⊤
1, j
a
⊤
2, j
,
unstable poles in LM2 can be detected:
max
i
µ
i
(A
LM,1
)
= 0.99 < 1,
max
i
µ
i
(A
LM,2
)
= 4.23 > 1
The phenomenon can be seen as overfitting and con-
tains the risk of unstable extrapolation behavior. Fi-
nally, the risk of reactivation (Nelles, 2020) of LMs
within the next splits is increased, since the split adap-
tion leads to major differences in the NRBF’s standard
deviations.
Figure 1: Extended state trajectory before ( ) and after ( )
the optimization of the first split in the ˆx
1
-dimension. The
colored contour lines show the validity functions and mark
the interpolation regime. For brevity, the ˆx
2
-u projection is
left out.
Note that the fixed centers of the LOLIMOT-
partitioned state space make this effect visible. It
can hardly be investigated for deep neural state space
models or recurrent neural networks, where all neu-
ral weights are trainable parameters. Furthermore, it
Space-Filling Regularization for Robust and Interpretable Nonlinear State Space Models
411

must be mentioned that the observed behavior (Fig. 1)
enables modeling with low flexibility. In the case of
LMSSN this means that only one split is sufficient for
the complete identification. Thus it is very effective
because only two local linear models are able to fit a
process with a smooth curve (3).
3 SPACE-FILLING EVOLUTION
Before merging modeling with space-filling proper-
ties, three suitable metrics for the assessment of data
point distributions are presented. Afterwards, their
evolution along the optimization progress is demon-
strated. For mathematical reasons, the state trajectory
is described as the set of points in the extended in-
put/state space as
X = ˜u
(k), ∀k ∈ {1, .. ., N}.
3.1 Metrics and Indicators
Inspired by the shape of the state trajectory in Fig. 1,
the covered volume is an intuitive and straightfor-
ward space-filling indicator. It can be assessed as
the volume of a convex hull on the state trajectory
(CHV) (Boyd and Vandenberghe, 2004). Written for
the extended input/state space, the volume V is de-
fined as
V =
1
dim( ˜u)
p
det(G),
(4)
where the Gram matrix G is filled with
G
i, j
= ˜u(i)
T
˜u( j), ∀i, j ∈ H .
The convex hull is defined by the set of points H ⊆
{1,2,...,N} derived with the help of the quickhull
algorithm. Intuitively, the CHV is going to deliver
large values for widely distributed points and small
values for concentrated points.
Alternatively, support point-based indicators are
commonly applied for assessing space-filling mea-
surements. Here, the state trajectory is compared to
a given distribution of n
g
grid or Sobol points G . In
this contribution, we concentrate on a uniform grid,
implying that a uniform distribution is desired. This
leads to the final two metrics.
First, the mean of the minimum distances ψ
p
from
every grid point g
j
,∀ j ∈ { j = 1,2, .. ., n
g
}, to the
nearest extended input/state space point ˜u(k) is cal-
culated (Herkersdorf and Nelles, 2025). The criterion
is strongly related to Monte Carlo Uniform Sampling
Distribution Approximation (Smits and Nelles, 2024).
In this paper, it is denoted with ψ
p
and given as
ψ
p
=
1
N
M
∑
j=1
min
k∈{1,...,N}
d( ˜u(k),g
j
) (5)
with the Euclidian distance d
d( ˜u(k),g
j
) =
q
˜u(k) − g
j
)
T
( ˜u(k) − g
j
).
It is imporant to note that distance-based criteria such
as ψ
p
can encounter difficulties in high-dimensional
spaces. Furthermore, its grid-oriented nature is af-
fected by the curse of dimensionality. Both aspects
are beyond the scope of this work, as we focus on
lower-dimensional problems. Nonetheless, they con-
stitute limitations of the approach.
Secondly, from a statistical point of view, the
Kullback-Leibler Divergence (KLD) is able to as-
sess the similarity of two probability density func-
tions (PDF) Kullback and Leibler (1951) The PDF
of a dataset S is denoted by P(S ). In the preva-
lent application, it compares the estimated probabil-
ity density
ˆ
P(X ) with the uniform distribution of a
grid P(G ) = 1/n
g
. The KLD is then calculated as
KLD = −
1
n
g
N
∑
k=1
log
ˆ
P(X )
. (6)
The required probability density estimation of the
state trajectory is done with kernel density estima-
tion (Scott, 1992). For the measurement of the space-
filling properties of a point distribution, both KLD
and ψ
p
will decrease when the state trajectory be-
comes uniformly, i.e., meets the grid.
3.2 Tracking Within Nonlinear
Optimization
For the sake of plausibility, the previously introduced
indicators in the example depicted in Fig. 1 are ex-
amined. Obviously, CHV decreases as the optimiza-
tion progresses. On the other hand, KLD and ψ
p
are expected to grow, because the state trajectory
is evenly distributed before the optimization, and
narrow-shaped after the optimization has converged.
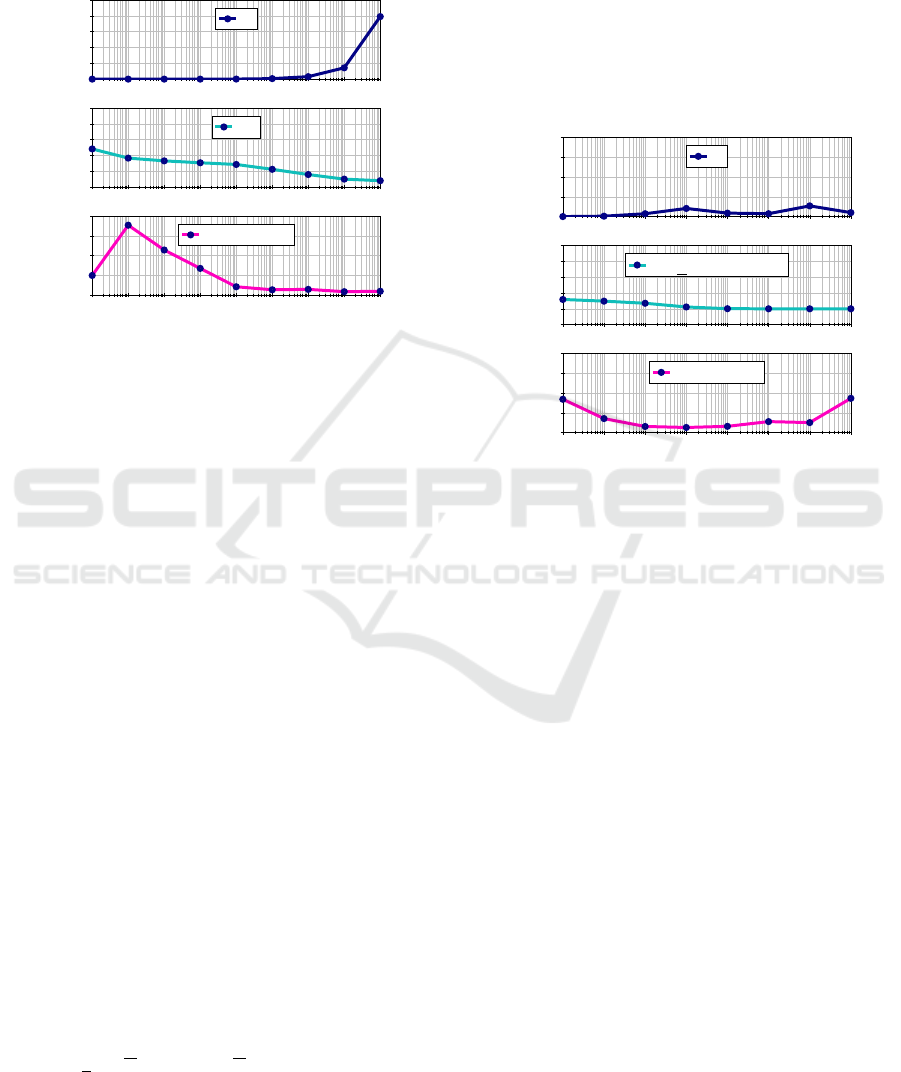
Figure 2 shows the evolution of the three space-filling
indicators as well as the loss along with the iterations.
It can be stated that all indicators detect the shrink-
age of the state trajectory and thus are validated. Note
that the absolute numerical values of the indicators are
not of interest here. The focus is only on the change
during the optimization. This is why the curves are
normalized w.r.t. their maximum values.
On closer inspection, it can be observed that the
changing curvature reveals large rates around iteration
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
412
10
0
10
1
10
2
10
3
10
4
0
0.2
0.4
0.6
0.8
1
Iteration
J
KLD CHV
ψ
p
Figure 2: Tracking of loss and space-filling indicators ac-
cording to the state trajectories depicted in Fig. 1.
110, indicated by the vertical line. Loosely spoken,
the optimization has already reached an acceptable fit
of the process output at this point which is visible in
the loss curve. It can be concluded that space-filling
measured by those indices gets worse after the model
performance met a satisfying level. This confirms that
the phenomenon of state trajectory deformation can
be seen as an overfitting of nonlinear state space mod-
els. This is why we recommend a regularization tech-
nique with an early-stopping effect in the next section.
4 REGULARIZED
IDENTIFICATION
Since strong state trajectory deformation is an unsat-
isfying effect, it is reasonable to design an additional
penalty for the objective that drives its data points to
a desired uniform distribution. In this section, we
present two penalty term approaches for space-filling
regularization of problem (2). Both approaches use
the ψ
p
described by (5) which was chosen due to im-
plementation reasons. Generally, Fig. 2 suggests that
all space-filling indicators would lead to similar re-
sults.
4.1 Space-Filling Penalty Term
As a consequence of the ψ
p
indicator delivering low
numerical values when data are space-filling and high
values when data are non-uniformly distributed, it
seems natural to add ψ
2
p
to the sum of the squared
output errors J in a weighted manner. The resulting
regularized problem is
min
θ
J(θ ) + λ · ψ
p
(θ)
2
s.t. Dynamics in (2),
(7)
where λ serves as regularization strength. Exemplar-
ily, a resulting state trajectory is illustrated in Fig. 3.
Remark. The regularization technique leads to the
stabilization of the local poles due to its relocation
1
0.5
1
ˆ
x
2
ˆ
x
1
1
0.5
1
u
ˆ
x
1
LM1
LM2
Figure 3: State trajectory after the optimization for λ = 10
on n
g
=125 grid points in three-dimensional extended in-
put/state space.
effect on data points in both LMs:
max
i
µ
i
(A
LM,1
)
= 0.78 < 1,
max
i
µ
i
(A
LM,2
)
= 0.89 < 1
Additionally, regularization enables the LMs to ex-
plain the dynamical character of the process: oscil-
lations are modeled with local complex eigenvalues,
which was not accomplished with the trajectories vis-
ible in Fig. 1. This demonstrates that the method
increases both robustness and interpretation of the
model, whereas a tradeoff regarding modeling perfor-
mance is achieved.
Next, we compare the evolution of loss J and ψ
p
for the regularized and unregularized problem during
the first split optimization, see Fig. 4.
10
0
10
1
10
2
10
3
10
4
0.2
0.4
0.6
Iteration
ψ
p
ψ
p
, λ = 0 ψ
p
, λ = 10
0
2
4
6
J
J, λ = 0 J, λ = 10
Figure 4: Comparison of regularization effect on ψ
p
and
J. Both ψ
p
evolutions contain the initial space-filling at the
first iteration with ψ
p
=0.23.
As already mentioned, in the unregularized case,
ψ
p
grows along the iterations, whereas the regular-
ized curve shows a slight decrease. This means that
the state trajectory expands during optimization. Con-
sequently, due to regularization, the loss cannot be re-
duced to J ≈ 0, because of the tradeoff between out-
put error fit and space-filling of the distribution. At
termination, it reaches a level of about J ≈ 2. Further-
more, the early-stopping effect caused by the penalty
term is visible. The regularized problem is terminated
after 324 iterations whereas the baseline runs till iter-
ation 3232. This enables major savings in training
time.
Space-Filling Regularization for Robust and Interpretable Nonlinear State Space Models
413
For the choice of the hyperparameter λ , a grid
search for values between 10
−4
and 10
4
is carried out.
Figure 5 visualizes J, ψ
p
and the number of iterations.
The figure shows an increase of J for stronger reg-
0
20
40
60
80
100
J
0
0.2
0.4
0.6
0.8
1
ψ
p
10
−4
10
−3
10
−2
10
−1
10
0
10
1
10
2
10
3
10
4
0
1,000
2,000
3,000
4,000
λ
Num. Iter.
Figure 5: Loss, space-filling and iterations after optimiza-
tion of problem (7) for various regularization strengths λ .
ularization, whereas ψ
p
can only be changed mod-
erately due to the dynamic relations between data
points. Since the initial state trajectory (iteration =
0, see light blue curve in Fig. 1) shows suitable space-
filling properties, it is sensible to choose λ such that
the final state trajectory yields a similar value for ψ
p
.
As Fig. 4 shows, the initial value for ψ
p
= 0.23 is
obtained for a linear model in balanced realization.
This amount of space-filling can be roughly matched
at convergence after the first split for the choice of
regularization strength of λ = 8. Independent of the
space-filling properties, λ > 1 are recommended to
realize maximum advantage w.r.t. computational de-
mand from the early-stopping (see Fig. 5, bottom di-
agram).
4.2 Desired Amount of Space-Filling
The proposed strategy requires a hyperparameter
study to find a good value for λ. If the desired value
for space-filling is known a priori, e.g., keeping ψ
p
from the initial model, an alternative approach is to
penalize the deviation between the current ψ
p
and the
desired one (named ψ
p,Target
). By this, it represents
as a desired degree of regularization. This regularized
nonlinear problem can be stated as follows,
min
θ
J(θ ) + λ ·
ψ
p
(θ) − ψ
p,Target
2
s.t. Dynamics in (2).
(8)
Here, a large value is chosen for the regulariza-
tion strength λ , since it simply determines the tight-
ness for matching ψ
p,Target
. For the demo process
ψ
p,Target
=0.23 is chosen, as it reflects the space-filling
of the initial model. Figure 6 shows the results of
the study on λ for problem (8). The loss J and the
space-filling quality ψ
p
are nearly independent of the
choice of λ . Therefore, it can be determined accord-
ing to the other criteria. Consequently, it is chosen as
10
3
, being a tradeoff between initial space-filling and
training time, measured by the number of iterations.
0
0.5
1
1.5
2
J
0
0.2
0.4
0.6
0.8
1
ψ
p
(θ) − ψ
p,Target
10
−1
10
0
10
1
10
2
10
3
10
4
10
5
10
6
0
1,000
2,000
3,000
4,000
λ
Num. Iter.
Figure 6: Optimization results of problem (8) for various
values of λ.
5 BENCHMARK DATASET
Next, we investigate the proposed regularization strat-
egy on a well-known system identification bench-
mark, namely the Bouc-Wen Hysteretic System. For
details on the benchmark, we refer to Schoukens and
No
¨
el (2017).
For brevity, we only show the results for the De-
sired Amount of Space-Filling approach, see prob-
lem (8) in Section 4.2. For the study, the space-filling
goal is chosen as ψ
p,Target
=0.25. As for the demo pro-
cess, the regularization strength is set to λ = 10
3
.
Remark. The termination of LOLIMOT is based on
the validation error. It is terminated when no signifi-
cant improvements (25 % of a normalized RMSE cor-
responding to an SNR of 40 dB) compared to the best
loss in all previous iterations can be accomplished for
three iterations. Then the simplest model within this
error range is selected.
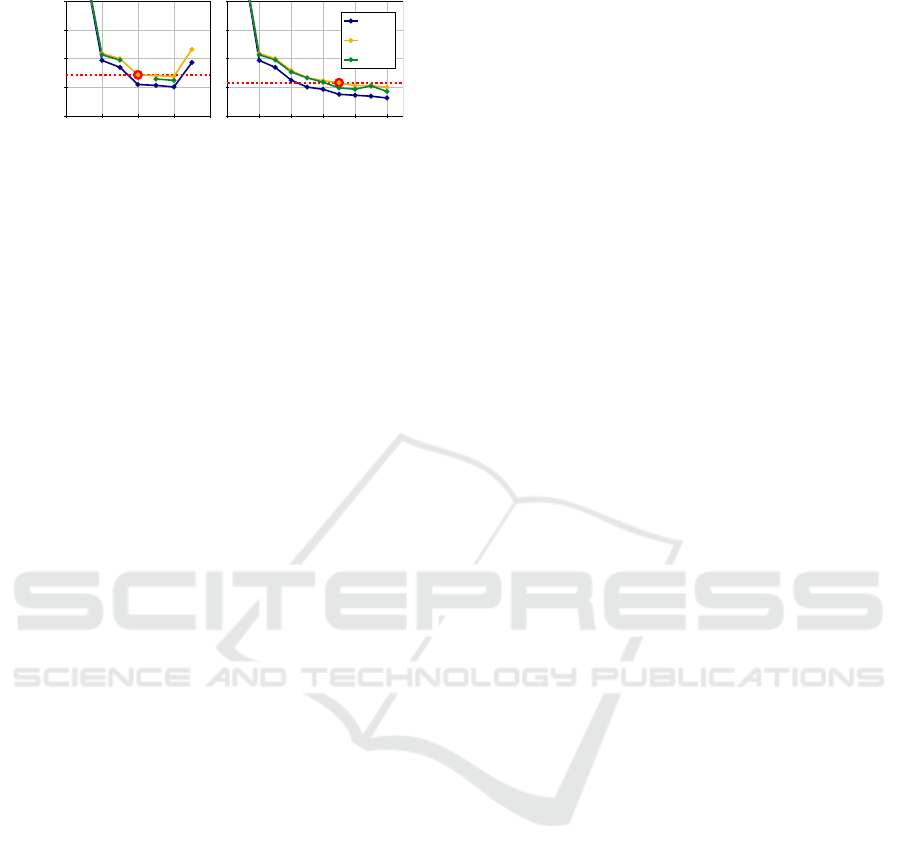
In Fig. 7, we compare the regularized and unreg-
ularized modeling cases regarding the RMSE of each
split on training, validation, and test dataset.
According to the termination criterion, the best
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
414
0 2 4 6 8 10
·10
−5
Split
λ = 10
3
0 2 4 6 8
0
1
2
3
4
·10
−5
Split
Error in m
λ =0
train
val
test
Figure 7: RMSE during LOLIMOT training. The best
model according to the validation error termination is
marked in red.
model for the unregularized case (λ =0) has four splits
because the validation error increases due to the sev-
enth split. This is caused by the splitting procedure
of LOLIMOT (see Sec. 2.1). The addition of a LM,
n
LM,x
→ n
LM,x
+ 1, requires updating the centers and
standard deviations of the Gaussians. Due to the nor-
malization, the validity functions Φ
[x]
j
are modified,
which in turn influences the state trajectory and thus
the output error. A poor initialization of the consec-
utive optimization of the split results and cannot be
compensated. Consequently, the training error of the
seven-split model is higher than the six-split model.
When evaluating the unregularized models on test
data, the models obtained by split numbers four and
seven show unstable behavior. In those cases, no sen-
sible RMSE can be obtained, which is why their val-
ues are omitted from the figure. Within the regular-
ized model ensemble, no instability could be detected
regarding test data. Consequently, the robustness of
LOLIMOT is improved.
Furthermore, it can be observed that regulariza-
tion allows LOLIMOT to perform seven splits for
the best model, compared to only four splits in the
unregularized case. Regularization enables the al-
gorithm to process the training dataset information
with more LMs. Evaluation on the benchmark’s test
dataset yields an RMSE of 0.981· 10
−5
m for the reg-
ularized best model, whereas the unregularized one
became unstable. In contrast to the stable splits, it
can be stated that space-filling regularization enables
better models. In comparison to other approaches,
the achieved result is among the best for this bench-
mark (Nonlinear Benchmark Working Group, 2025).
6 CONCLUSIONS
In this paper, we investigated the effect of nonlinear
optimization on the extended input/state space data
point distribution of nonlinear state space models.
Two regularization approaches for penalizing poor
space-filling quality are derived and tested, resulting
in models with more meaningful and accurate local
models. This is achieved by more local estimation
and less interpolation as well as stable local behavior.
Furthermore, higher modeling performance could be
accomplished and the number of iterations could be
reduced per optimization. Future lines of research
will focus on the stable extrapolation behavior due
to space-filling enforcement in the local model state
space network. Morevover, the applicability of space-
fillling metrics with higher-dimensional settings will
be adressed.
REFERENCES
Belz, J., M
¨
unker, T., Heinz, T. O., Kampmann, G., and
Nelles, O. (2017). Automatic modeling with local
model networks for benchmark processes. IFAC-
PapersOnLine, 50(1):470–475. 20th IFAC World
Congress.
Bemporad, A. (2024). An l-bfgs-b approach for linear and
nonlinear system identification under ℓ
1
and group-
lasso regularization.
Boyd, S. and Vandenberghe, L. (2004). Convex Optimiza-
tion. Cambridge University Press.
Forgione, M. and Piga, D. (2021). Model structures and fit-
ting criteria for system identification with neural net-
works.
Garulli, A., Paoletti, S., and Vicino, A. (2012). A sur-
vey on switched and piecewise affine system identifi-
cation. IFAC Proceedings Volumes, 45(16):344–355.
16th IFAC Symposium on System Identification.
Herkersdorf, M. and Nelles, O. (2025). Online and offline
space-filling input design for nonlinear system identi-
fication: A receding horizon control-based approach.
arXiv preprint arXiv:2504.02653.
Kullback, S. and Leibler, R. A. (1951). On Information and
Sufficiency. The Annals of Mathematical Statistics,
22(1):79 – 86.
Liu, Y., T
´
oth, R., and Schoukens, M. (2024). Physics-
guided state-space model augmentation using
weighted regularized neural networks.
Ljung, L. (1999). System identification (2nd ed.): theory for
the user. Prentice Hall PTR, USA.
Ljung, L., Andersson, C., Tiels, K., and Sch
¨
on, T. B.
(2020). Deep learning and system identification.
IFAC-PapersOnLine, 53(2):1175–1181. 21st IFAC
World Congress.
Luenberger, D. (1967). Canonical forms for linear multi-
variable systems. Automatic Control, IEEE Transac-
tions on, AC-12:290 – 293.
McKelvey, T., Akcay, H., and Ljung, L. (1996). Subspace-
based multivariable system identification from fre-
quency response data. IEEE Transactions on Auto-
matic Control, 41(7):960–979.
Nelles, O. (2020). Nonlinear System Identification From
Classical Approaches to Neural Networks, Fuzzy
Space-Filling Regularization for Robust and Interpretable Nonlinear State Space Models
415

Models, and Gaussian Processes. Springer Interna-
tional Publishing; Imprint: Springer, 2020. 2nd ed.
2020., Cham.
Nonlinear Benchmark Working Group (2025). Nonlinear
benchmark models for system identification. https:
//www.nonlinearbenchmark.org/benchmarks. Ac-
cessed: 2025-05-19.
Paduart, J., Lauwers, L., Swevers, J., Smolders, K.,
Schoukens, J., and Pintelon, R. (2010). Identification
of nonlinear systems using polynomial nonlinear state
space models. Automatica, 46:647–656.
Pillonetto, G., Chen, T., Chiuso, A., De Nicolao, G., and
Ljung, L. (2022). Regularization for Nonlinear Sys-
tem Identification, pages 313–342. Springer Interna-
tional Publishing, Cham.
Pintelon, R. and Schoukens, J. (2012). System Identifica-
tion: A frequency Domain Approach. Wiley / IEEE
Press, 2 edition. IEEE Press, Wiley.
Rotondo, D., Puig, V., Nejjari, F., and Witczak, M.
(2015). Automated generation and comparison of
takagi-sugeno and polytopic quasi-lpv models. Fuzzy
Sets and Systems, 277.
Schoukens, M. and No
¨
el, J. (2017). Three benchmarks ad-
dressing open challenges in nonlinear system identi-
fication. IFAC-PapersOnLine, 50(1):446–451. 20th
IFAC World Congress.
Sch
¨
ussler, M. (2022). Machine learning with nonlinear
state space models. PhD thesis, Universit
¨
at Siegen.
Sch
¨
ussler, M., M
¨
unker, T., and Nelles, O. (2019). Lo-
cal model networks for the identification of nonlinear
state space models. In 2019 IEEE 58th Conference on
Decision and Control (CDC), pages 6437–6442.
Scott, D. (1992). Multivariate Density Estimation: The-
ory, Practice, and Visualization. A Wiley-interscience
publication. Wiley.
Smits, V. and Nelles, O. (2024). Space-filling optimized ex-
citation signals for nonlinear system identification of
dynamic processes of a diesel engine. Control Engi-
neering Practice, 144:105821.
Suykens, J. A. K., De Moor, B. L. R., and Vandewalle, J.
(1995). Nonlinear system identification using neural
state space models, applicable to robust control de-
sign. International Journal of Control, 62(1):129–
152.
Van Overschee, P. and De Moor, B. (1995). A unifying
theorem for three subspace system identification al-
gorithms. Automatica, 31(12):1853–1864. Trends in
System Identification.
Verriest, E. and Kailath, T. (1983). On generalized balanced
realizations. IEEE Transactions on Automatic Con-
trol, 28(8):833–844.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
416
