
Comparison of Relaion-DETR and YOLO 11 Object Detection
Methods
Yanxi Wang
a
School of Computer Science and Engineering, Tianjin University of Technology, Tianjin, China
Keywords: Object Detection, Performance Comparison, Deep Learning, Relation-DETR, YOLO 11.
Abstract: This study compares the performance of two object detection methods based on deep learning, Relation-
DETR and YOLO 11, using COCO datasets, in image detection tasks of animals, landscapes, people, and
other categories. The experimental results show that YOLO 11 is significantly better than Relation-DETR in
successful detection rate, especially in animals, people, and other categories to achieve a successful detection
rate of more than 90%. However, in landscape detection tasks, the performance of both methods is not ideal,
indicating the limitation of object recognition tasks in specific scenes. While YOLO 11 has the advantage in
terms of detection accuracy, Relation-DETR stands out in terms of operability thanks to its user-friendly
visual interface design. In order to improve the recognition accuracy, this paper proposes some improvement
measures, such as thinning the data set and introducing domain-specific prior knowledge, to provide solutions.
Through experiments and comparative analysis, this study provides a valuable reference for selecting
appropriate object detection methods and their optimization.
1 INTRODUCTION
In today's life, object detection technology has been
widely used in all aspects of life, and this technology
has become a research hotspot in recent years (Wang
et al., 2021), from the camera recognition of
intelligent driving systems to the recognition and
detection of cell level based on deep learning, all of
which are inseparable from the support of object
detection (Wang, 2023; Xia, 2020). However, many
large-scale object detection tasks are characterized by
large-scale and high engineering costs. For example,
in order to ensure the normal operation of traffic, it is
necessary to use object detection technology to
provide computer vision assistance to the police
(Wang, Chen, & Sun, 2025). Among many current
methods, methods based on deep learning are widely
used, and it is necessary to reduce the quality of
vehicle images and improve the generalization ability
of recognition to meet the needs of different scenes
(Han, 2024). This requires the SkyEye system to
acquire images from pictures or videos of vehicles in
a short time, and to locate and recognize license plate
characters according to specific algorithms for text
detection (Zhang et al., 2023). However, such large-
a
https://orcid.org/0009-0006-8230-6012
scale collection and analysis efforts are clearly not
suitable for the analysis of small objects. For
example: The analysis of medical images is not only
the recognition of images in the 2D plane, but also the
recognition of medical images such as 3D and 4D
magnetic resonance images (Chen et al., 2021), which
requires computer-aided detection (CAD) system to
accurately identify lesions, and to have certain
consideration for different organ appearances of
different patients, so as to assist medical staff to
measure the relevant structure and function of the
current case in a short time and make a judgment on
whether the disease is present (Tao et al., 2018). The
work of analysing whether a single organ has a lesion
is different from automobile detection. In automobile
detection, there is usually a set of excellent
recognition algorithms, which are undergoing
continuous improvement and improvement (Zhuang,
2022), while the detection of medical images is
refined to the point that each organ has its own unique
algorithm, and the recognition rate of specific lesions
must reach more than 90% (He, 2019).
Therefore, in this paper, we will use the relation-
DETR object detection method and the classical
YOLO11 object detection method to analyse the data
420
Wang, Y.
Comparison of Relaion-DETR and YOLO 11 Object Detection Methods.
DOI: 10.5220/0013698600004670
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Data Science and Engineering (ICDSE 2025), pages 420-429
ISBN: 978-989-758-765-8
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

respectively, and compare them. In the process of
analysis, the experimental pictures are divided into
four categories: animals, people, landscapes and
others, and the detection results are divided into three
categories: successful and accurate, successful but
inaccurate, and unsuccessful. Based on these
detection results and the classification of the detected
objects, this paper compares the two methods and
proposes some suggestions for improvement.
2 DATASET MODEL
2.1 Data Set
The COCO dataset was used as the basic data source
in this experiment. Eighty images were randomly
selected from the dataset and classified according to
established classification criteria. The samples were
divided equally into four categories: 20 animals, 20
people, 20 landscapes and 20 other objects. This
balanced sample distribution provides a reliable
database for subsequent experiments.
2.2 Model and Method
In this study, the Relation-DETR object detection
method is used first, and 120 images are detected and
analysed by combining them with the pre-trained
model. The specific process is as follows. The first
step is to load the pre-trained model and weight code
for loading the relation-DETR model and its weights.
This function defines various parameters of the
model, such as embedding dimensions, number of
categories, number of queries, etc. The second step is
to create a graphical user interface (GUI) that
facilitates interaction with the user. The code defines
a “create_gui” function that creates a simple GUI that
allows the user to select images and run object
detection. The GUI contains the following
components: Picture Display tab, Select Picture
button, Picture Path input box, Run Reasoning button,
and Results Display tab. The third step is to run
reasoning, this step is the core function of the code,
first the user clicks the "select picture" button, which
will pop up a file dialog box, let the user select a
picture, select picture, the picture will be displayed in
the GUI picture display label, and update the picture
path input box content. After the user clicks the "Run
Reasoning" button, the program reads the image path
in the image path input box and loads the image. After
the image is pre-processed (scaled, and converted to
Tensor), it is used as the input of the model for
reasoning. Model outputs include bounding boxes,
category labels, and confidence scores. A threshold
according to the confidence score to screen out the
detection results with high confidence. Finally, draw
the detection result, drawing the filtered bounding
box and category label on the original image. Zoom
the drawn picture and display it in the picture display
tab of GUI, and update the result display tab to
prompt the user of the detected object.
The second is the YOLO 11 object detection
method. This study still uses the method of pre-
trained model to detect and reason 120 images. The
first step in the code for this model is to import the
model, which is used to load the model and make
predictions. The second step is to import the image to
be detected by setting the absolute path defined by the
user and setting the size of the input image to
640×640 pixels. After processing by GPU, the
detection result is saved to the image file. The third
step is to use OpenCV's “show” function to display
an image of the detection result and wait for the user
to press Start Detection and generate a prediction
result. The final step is to close all OpenCV creation
windows and save the results
3 EXPERIMENTAL RESULT
3.1 The Results of the Relation-DETR
based Object Detection Method
3.1.1 The Animal
The number of successful and accurate detections is
12, as shown in Figure 1 below:
Comparison of Relaion-DETR and YOLO 11 Object Detection Methods
421
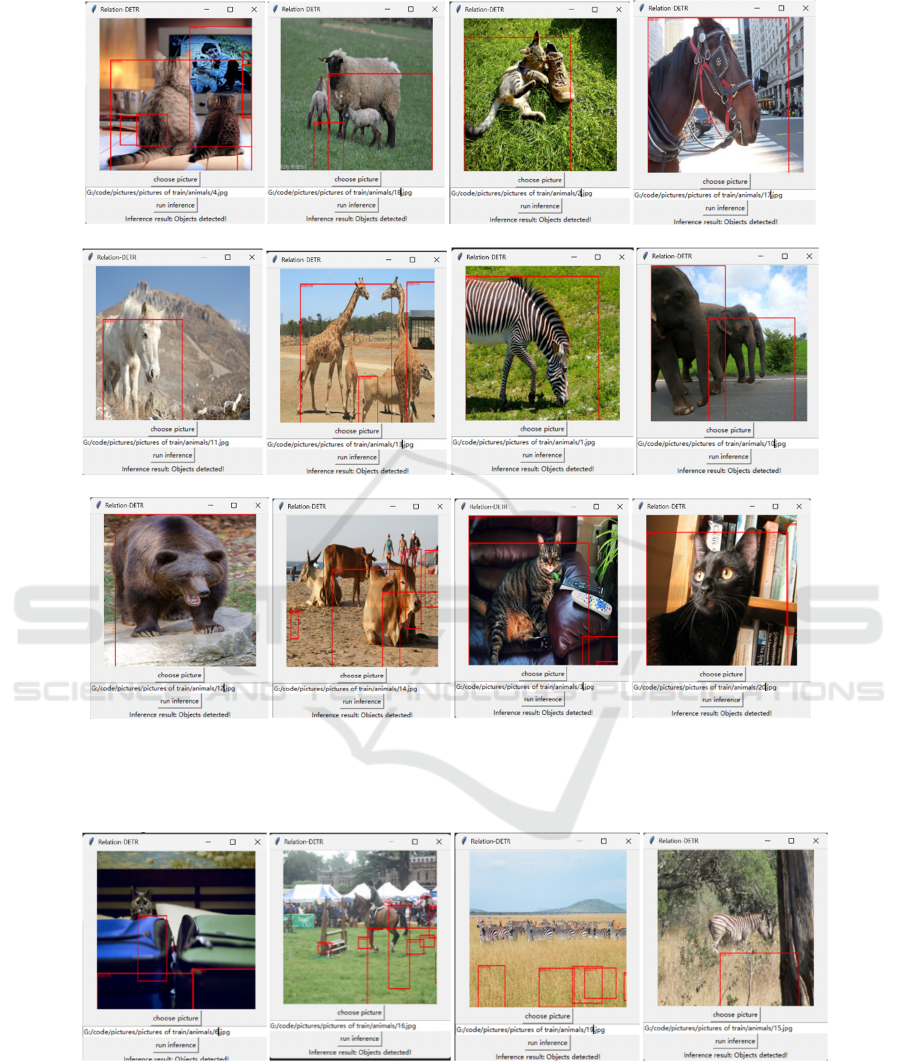
Figure 1: Successful and accurate detection of animals. (Picture credit: Original)
The number of successful inaccurate detections is
8, as shown in Figure 2 below:
ICDSE 2025 - The International Conference on Data Science and Engineering
422

Figure 2: Successful but inaccurate detection of animals. (Picture credit: Original)
3.1.2 The Landscape
The number of successful and accurate detections is
3, as shown in Figure 3 below:
Figure 3: Successful and accurate detection of landscape images. (Picture credit: Original)
The number of successful inaccurate detection is
10, as shown in Figure 4 below:
Comparison of Relaion-DETR and YOLO 11 Object Detection Methods
423
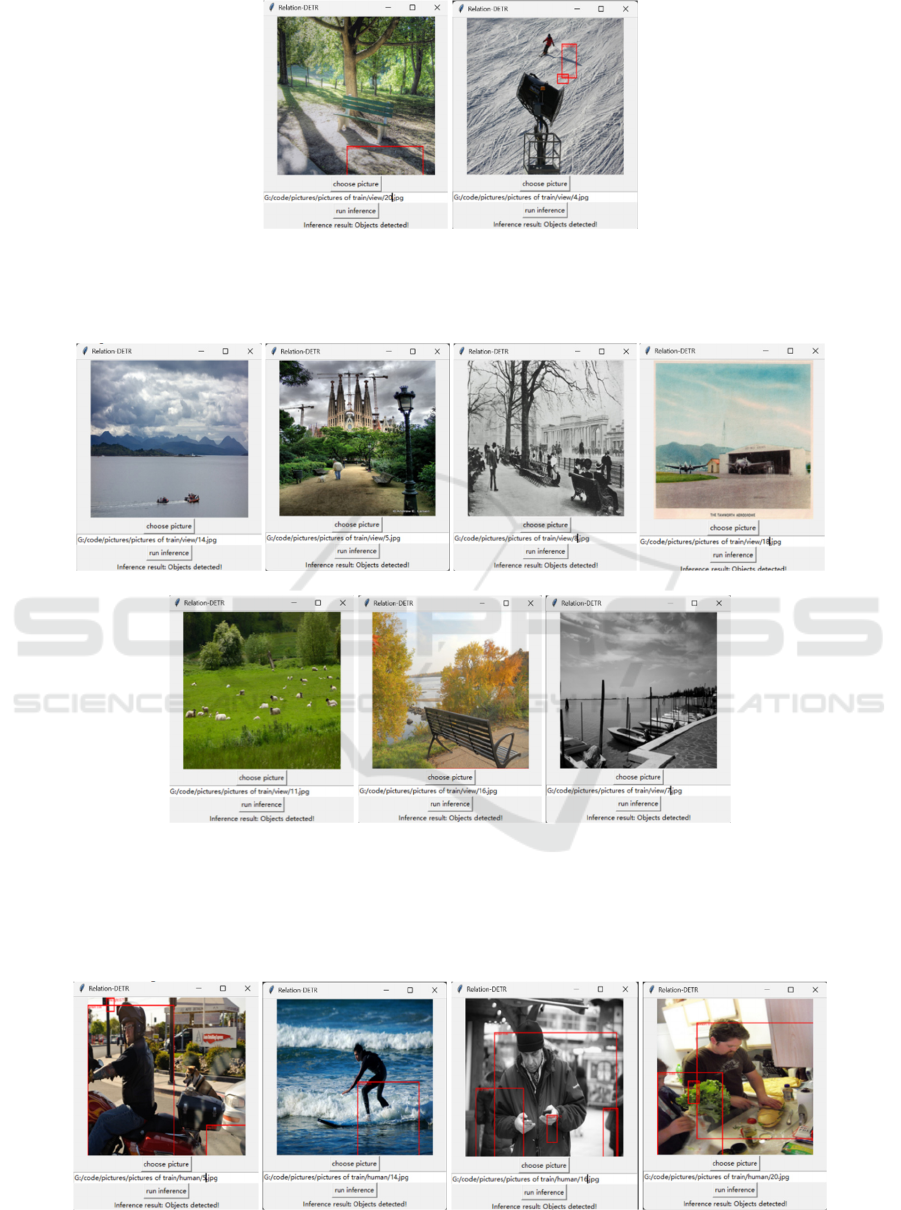
Figure 4: Scenery successful but inaccurate detection picture. (Picture credit: Original)
The number of unsuccessful detections is 7, as
shown in Figure 5 below:
Figure 5: Unsuccessful detection of landscape images. (Picture credit: Original)
3.1.3 Character Category
The number of successful and accurate detections is
17, as shown in Figure 6 below:
ICDSE 2025 - The International Conference on Data Science and Engineering
424

Figure 6: Successful and accurate detection of people. (Picture credit: Original)
The number of successful inaccurate detections is
3, as shown in Figure 7:
Figure 7: Successful but inaccurate detection of people. (Picture credit: Original)
The number of unsuccessful tests is 0.
3.1.4 The Other Classes
The number of successful and accurate detection is
14, as shown in Figure 8 below:
Comparison of Relaion-DETR and YOLO 11 Object Detection Methods
425
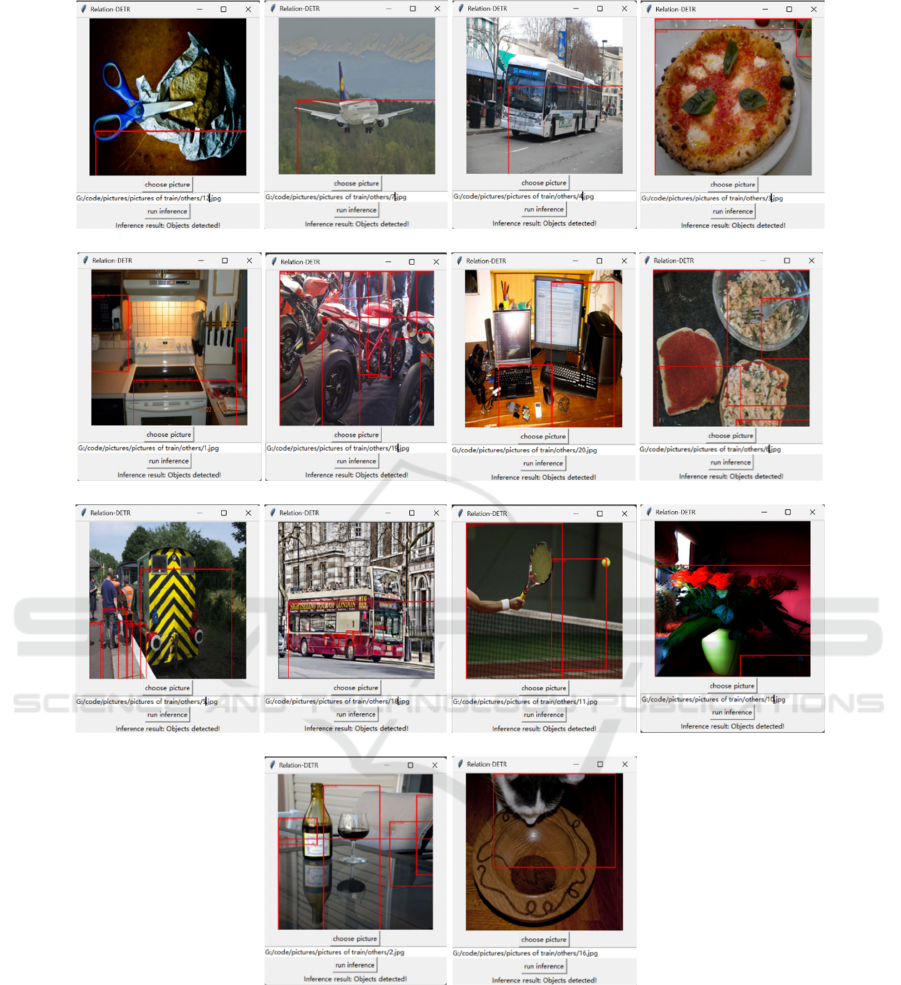
Figure 8: Other categories successfully and accurately detect pictures. (Picture credit: Original)
The number of successful inaccurate detection is
2, as shown in Figure 9 below:
ICDSE 2025 - The International Conference on Data Science and Engineering
426

Figure 9: Other categories successfully but inaccurately detected pictures. (Picture credit: Original)
The number of unsuccessful detections is 4, as
shown in Figure 10 below:
Figure 10: Other categories successfully but inaccurately detected pictures. (Picture credit: Original)
3.2 Experimental Result
In order to test the superiority of the Relation-DETR
object detection method, the same data were
simultaneously tested by the YOLO 11 object
detection method, and the test results were as follows:
3.2.1 In the Animal Category
The number of successful and accurate detections is
20, and the remaining two types are 0, among which
one picture successfully detected is shown in Figure
11:
Figure 11: Successful and accurate detection of animals.
(Picture credit: Original)
3.2.2 In the Landscape Category
The number of successful and accurate detections is
18, one of which is shown in Figure 12, and the other
two types are 1, as shown in Figure 13 and Figure 14
respectively.
Figure 12: Successful and accurate detection of landscape
images. (Picture credit: Original)
Figure 13: Scenery successfully but inaccurately detected
pictures. (Picture credit: Original)
Comparison of Relaion-DETR and YOLO 11 Object Detection Methods
427

Figure 14: Unsuccessful detection of landscape images.
(Picture credit: Original)
3.2.3 In the Human Category
The number of successful and accurate detections is
20, and the remaining two types are 0, of which one
image is successfully detected as shown in Figure 15.
Figure 15: Successful and accurate detection of people.
(Picture credit: Original)
3.2.4 In other categories
The number of successful and accurate detections is
19, one of which is shown in Figure 16, the number
of successful inaccurate detections is 0, and the
number of unsuccessful detections is 1, one of which
is shown in Figure 17.
Figure 16: Successful and accurate detection of images in
other categories. (Picture credit: Original)
Figure 17: Other unsuccessful detection images. (Picture
credit: Original)
In order to reflect the results more intuitively, the
probability of the detection results of the four
categories of animals, landscapes, people and general
objects is statistically calculated through the
statistical chart, so as to compare the Relation-DETR
object detection method with the YOLO 11 object
detection method. The statistical table is shown in
Table 1 below.
Table 1: Statistical table of four types of comparative detection.
Successful and accurate detection Successful inaccurate detection unsuccessful detection
Relation
-DETR
YOLO11
Relation
-DETR
YOLO11
Relation
-DETR
YOLO11
animal 60% 100% 40% 0% 0% 0%
Landsca
p
e 15% 90% 50% 5% 35% 5%
Peo
p
le 85% 100% 15% 0% 0% 0%
other classes 70% 95% 10% 5% 20% 0%
From the above table statistics, it can be seen that
among the four types of detection work, YOLO 11's
successful detection rate is much higher than that of
Relation-DETR, and the successful detection rate
reaches more than 90%. Compared with the other
three types, the detection accuracy of both methods is
lower in landscape detection, which indicates that the
object recognition model is not suitable for landscape
detection.
4 CONCLUSIONS
Combined with the above research, it is found that
from the experimental results, the YOLO 11 object
detection method has a higher success rate and
accuracy than the Relation-DETR object detection
method. However, unlike YOLO 11, which loads
image paths from code for identification, Relation-
ICDSE 2025 - The International Conference on Data Science and Engineering
428

DETR has a user UI interface that makes it easy for
non-technical people to train models and analyze
results.
This interface design makes the Relation-DETR
object detection method better than YOLO 11 in
terms of visualization and operability, especially in
projects that require presentation. After comparing
the data with YOLO 11, we conclude that the
advantage of Relation-DETR object detection
method for object detection in large data sets is that
the model can learn a wider range of features, thus
having strong generalization ability, but this may also
lead to insufficient recognition accuracy of the model
in specific categories; in contrast, single object
detection can achieve higher accuracy in specific
fields, but generalization ability may be limited. For
the performance of Relation-DETR in single object
detection, the following improvement measures are
suggested: firstly, refining the dataset to ensure that
there are enough representative samples for each
class; secondly, combining transfer learning
technology, using the model weights pre-trained on
large datasets to initialize the training of small
datasets; thirdly, introducing domain-specific prior
knowledge to enhance the recognition ability of the
model for specific objects through feature
engineering. Through the implementation of these
improved schemes, this paper is expected to further
improve the accuracy and generalization ability of
object detection and provide a more reliable
guarantee for practical applications.
REFERENCES
Chen, H. Y., Gao, J. Y., & Zhao, D. (2021). Deep learning
and biomedical image analysis 2020 review. Journal of
China Image Graphics, 26(3), 475-486.
Han, S. (2024). License plate recognition and speed
estimation of highway speed measuring equipment
based on deep learning. Electronic Components and
Information Technology, 8(4), 103-106.
https://doi.org/10.19772/j.cnki.2096-4455.2024.4.031
He, J. (2019). Medical image analysis and application of
pneumoconiosis based on deep learning [Doctoral
dissertation, Nanjing University].
Tao, P., Fu, Z., & Zhu, K. (2018). Research on medical
computer-aided detection method based on deep
learning. Journal of Biomedical Engineering, 35(3),
368-375.
Wang, J., Chen, Z., & Sun, J. (2025). Application of semi-
supervised object detection based on fusion attention
mechanism in rail transit. Locomotive Electric Drive,
1-7. https://doi.org/10.13890/j.issn.1000-
128X.2025.01.104
Wang, W., Jiang, G., & Chu, Y. (2021). An overview of
object detection systems from RCNN to YOLO.
Journal of Qilu University of Technology, 35(5), 9-16.
https://doi.org/10.16442/j.cnki.qlgydxxb.2021.05.002
Wang, Y. (2023). Research on improvement of intelligent
driving target detection algorithm based on point cloud
and image fusion [Doctoral dissertation, Jilin
University].
https://doi.org/10.27162/d.cnki.gjlin.2023.001357
Xia, M. (2020). Cervical cancer cell medical image
detection based on convolutional neural network
[Doctoral dissertation, Tianjin University].
https://doi.org/10.27356/d.cnki.gtjdu.2020.003619
Zhang, T. B., Yang, Y., & Qu, Q. Q. (2023). Research on
license plate detection and recognition algorithm in
freeway scene. Western Communications Technology,
(9), 205-207.
https://doi.org/10.13282/j.cnki.wccst.2023.09.062
Zhuang, Y. (2022). Efficient and robust machine learning
methods for challenging traffic video sensing
applications [Doctoral dissertation, University of
Washington].
Comparison of Relaion-DETR and YOLO 11 Object Detection Methods
429
