
A Convexity-Dependent Two-Phase Training Algorithm for Deep Neural
Networks
Tomas Hrycej
1†
, Bernhard Bermeitinger
2† a
, Massimo Pavone
1‡
, G
¨
otz-Henrik Wiegand
1† b
and
Siegfried Handschuh
1† c
1
Institute of Computer Science, University of St.Gallen (HSG), St.Gallen, Switzerland
2
Institute of Computer Science in Vorarlberg, University of St. Gallen (HSG), Dornbirn, Austria
fi fi
Keywords:
Conjugate Gradient, Convexity, Adam, Computer Vision, Vision Transformer.
Abstract:
The key task of machine learning is to minimize the loss function that measures the model fit to the training
data. The numerical methods to do this efficiently depend on the properties of the loss function. The most
decisive among these properties is the convexity or non-convexity of the loss function. The fact that the loss
function can have, and frequently has, non-convex regions has led to a widespread commitment to non-convex
methods such as Adam. However, a local minimum implies that, in some environment around it, the function
is convex. In this environment, second-order minimizing methods such as the Conjugate Gradient (CG) give
a guaranteed superlinear convergence. We propose a novel framework grounded in the hypothesis that loss
functions in real-world tasks swap from initial non-convexity to convexity towards the optimum — a property
we leverage to design an innovative two-phase optimization algorithm. The presented algorithm detects the
swap point by observing the gradient norm dependence on the loss. In these regions, non-convex (Adam)
and convex (CG) algorithms are used, respectively. Computing experiments confirm the hypothesis that this
simple convexity structure is frequent enough to be practically exploited to substantially improve convergence
and accuracy.
1 INTRODUCTION
Fitting model parameters to training data is the fun-
damental task of Machine Learning (ML) with pa-
rameterized models. The sizes of the models have
experienced extraordinary growth, recently reaching
hundreds of billions. This makes clear that the ef-
ficiency of the optimization algorithm is of key im-
portance. The optimization consists of minimizing an
appropriate loss criterion such as Categorical Cross-
Entropy (CCE), Mean Squared Error (MSE), or many
other variants. These criteria are multidimensional
functions of all model parameters. From the view-
point of solvability, there are three basic classes of un-
constrained minimization tasks according to the char-
acteristics of the minimized function:
1. Convex functions
2. Non-convex functions with a single local mini-
mum (which is also a global minimum)
a
https://orcid.org/0000-0002-2524-1850
b
https://orcid.org/0009-0009-0392-056X
c
https://orcid.org/0000-0002-6195-9034
3. Non-convex functions with multiple local minima
Non-convex functions are frequently referred to as
a single group in the ML literature. This aggrega-
tion shadows a significant difference. In practical
terms and for typical numbers of trainable parame-
ters of current models, global minimization of a gen-
eral function with multiple local minima is infeasi-
ble (see Section 2). By contrast, gradient descent
can practically minimize non-convex functions with
a single local minimum. Every descending path will
reach the minimum with certainty if it is not trapped
in singularities. For convex loss functions, the odds
are even better. The classical theory of numerical op-
timization provides theoretically founded algorithms
with a guaranteed convergence speed, also referenced
in Section 2.
From the viewpoint of this problem classifica-
tion, it is well known that loss functions with popu-
lar nonlinear models can possess multiple local min-
ima, and thus count to the last class mentioned. Some
of these minima are equivalent (such as those arising
through permutations of hidden-layer units), but oth-
ers may not. So, the paradoxical situation concern-
78
Hrycej, T., Bermeitinger, B., Pavone, M., Wiegand, G.-H. and Handschuh, S.
A Convexity-Dependent Two-Phase Training Algorithm for Deep Neural Networks.
DOI: 10.5220/0013696100004000
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2025) - Volume 1: KDIR, pages 78-86
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

ing the training of nonlinear models is that methods
are used that almost certainly cannot solve the prob-
lem of finding a global minimum. The implicit as-
sumption is that the existence of multiple minima can
be neglected in the hope that the concretely obtained
local minimum is sufficiently suitable for the appli-
cation. The positive experience with many excellent
real models seems to justify this assumption. What
remains is distinguishing between two former basic
classes: convex functions and non-convex functions
with a single minimum (further referred to simply as
non-convex).
The fact that the loss functions of popular ar-
chitectures are potentially non-convex has led to the
widespread classification of these loss functions as
non-convex. However, from a theoretical viewpoint,
the loss function is certainly convex in some environ-
ment of the local minimum. This axiomatically re-
sults from the definition of a local minimum of any
smooth function L(x) by the gradient being zero:
∇L(x) = 0 (1)
and the Hessian
H(x) = ∇
2
L(x) (2)
being positive definite, i.e., having positive eigenval-
ues. There, convex minimization algorithms are cer-
tainly worth using. This guaranteed convex region
can optionally be — and frequently is — surrounded
by a non-convex region.
From this point of view, the key question for algo-
rithm choice is where the loss function is convex and
where not. Although it is known that, in general, there
may be an arbitrary patchwork of convex and non-
convex subregions, a simpler, while not universally
valid, assumption may exist that covers typical model
architectures and application tasks. One such assump-
tion is formulated in Section 3. In the next step, we
will propose the appropriate optimization procedure
accordingly (Section 4). If an assumption about a typ-
ical distribution of convexity is tentatively adopted,
it is crucial to check how frequently this assumption
applies in the spectrum of application problems. Al-
though an extensive survey is not feasible due to re-
source limitations, experiments with a variety of typ-
ical architectures (with a focus on a Transformer and
some of its simplified derivatives) are performed and
reviewed to determine the validity of the assumption
and the efficiency effect of optimization (Section 5).
2 RELATED WORK
The alleged infeasibility of minimizing functions with
multiple local minima is based on algorithms avail-
able after decades of intensive research. Heuristics,
such as momentum-based extensions of the gradient
method, alleviate this problem by possibly surmount-
ing barriers between individual attractors. Still, there
is no guarantee (and also no acceptable probability)
of reaching the global minimum in a finite time, since
the number of attractors and boundaries between them
is too large. Similarly, methods based on annealing or
relaxation (Metropolis et al., 1953; Kirkpatrick et al.,
1983) show asymptotical convergence in probability,
but the time to reach some probabilistic bounds is
by far unacceptable. Algorithms claiming complete
coverage of the parameter space, like those based on
Lipschitz constant bounds, or so-called clustering and
Bayesian methods such as (Rinnooy Kan and Timmer,
1987; Mockus et al., 1997) are appropriate for small
parameter set sizes less than ten.
By contrast, for non-convex functions with a sin-
gle local minimum, every descending path will reach
the minimum with certainty if not trapped in singu-
larities. Today’s algorithms, such as Adam (Kingma
and Ba, 2015), focus on efficiency in following the
descending path. There are convergence statements,
for example, by (Fotopoulos et al., 2024; Chen et al.,
2022). An interesting proposal for transforming a
non-convex unconstrained loss function to a convex
one with constraints is by (Ergen and Pilanci, 2023).
However, this approach applies only to neural net-
works with one hidden layer and the ReLU acti-
vation function. A good option for covering both
non-convex and convex regions would be second-
order algorithms with adaptive reaction to local non-
convexity, such as some variants of the Levenberg-
Marquardt algorithm (Levenberg, 1944; Press et al.,
1992). This algorithm is specific for least-squares
minimization. It entertains a kind of “convexity
weight” of deciding between a steepest gradient step
and the step towards the estimated quadratic mini-
mum. Unfortunately, the algorithm requires storing
an estimate of the Hessian, which grows quadrati-
cally in the number of parameters, which makes it
clearly infeasible for billions of parameters, even if
using sparse Hessian concepts.
For convex loss functions, a numerical algorithm
with a guaranteed convergence speed could be nonlin-
ear conjugate gradient method (Fletcher and Reeves,
1964) and (Polak and Ribi
`
ere, 1969). Both versions
and their implementations are explained in (Press
et al., 1992). They exploit the fact that convex func-
tions can both be approximated quadratically. This
quadratic approximation has an explicit minimum
whose existence can be used to approach the non-
quadratic but convex function minimum iteratively,
with the guarantee of superlinear convergence.
A Convexity-Dependent Two-Phase Training Algorithm for Deep Neural Networks
79

3 CONVEX AND NON-CONVEX
REGIONS OF LOSS
FUNCTIONS
In this section, the hypothesis will be pursued that the
following constellation characterizes the typical case:
There is a convex region around the minimum, sur-
rounded by a non-convex region. We are aware that
this hypothesis will not apply to arbitrary tasks. How-
ever, if this were frequently the case in typical appli-
cations, it could be exploited for a dedicated use of
first- and second-order algorithms, respectively.
A pictorial representation of the situation is given
in Figure 1 showing the dependence of MSE on the
scaling parameter p for a set of five random tasks with
a single nonlinear layer tanh model (with 100 units)
y(x) =
∑
i
tanh(px) (3)
and its square loss
L(x) =
y(x) − r
2
(4)
with reference values r of the output y randomly
drawn from (0, 1). The set is generated for randomly
selected input arguments x from (−0.5, 0.5). Convex-
ity around the minimum and non-convexity at margin
areas can be observed.
A different view of the same five random tasks is
the dependence of gradient norm on the loss, as de-
picted in Figure 2. The gradient norm is trivial in the
one-dimensional case: it is the absolute value of the
derivative. During optimization, the loss on the x-axis
decreases (from the right to the left). The gradient
norm (the y-axis) first increases (the non-convex re-
gion) and then decreases (the convex region) - this
pattern can be observed for all five tasks. The two
branches per task correspond to the different paths to
the minimum (starting at the left or at the right mar-
gin, respectively, in Figure 1). It should be noted that
there is no guarantee for this simple convexity pat-
tern. Our hypothesis is that this pattern is frequently
encountered and is not universally valid.
In the multidimensional parameter space, vertical
cross-sections of a convex function are also convex
so that the property of diminishing gradient norm is
retained. This is also the case for steepest gradient
paths, such as that given in the 2D plot of Figure 3; the
level curves become successively less dense along the
path. Of course, with an inappropriate step size, the
optimization trajectory may contain segments with
a temporarily increasing gradient norm if “climbing
back the slope”.
Real-world models are incomparably more com-
plex. Theoretically, the patterns of non-convex re-
gions may be alternating with intermediary convex
segments, forming an arbitrary patchwork. This pit-
fall is analogous to those loss functions that can (and
almost certainly) have multiple local minima, as men-
tioned in Section 1. Alternating convex and non-
convex regions are, in fact, an early stage of arising
multiple local minima. Observing a trivial two-layer
network with the hidden layer
h(x) = tanh(x) (5)
and output layer
y(x) = tanh(h (x)) +C tanh(−2h (x)) (6)
with a varying weight C, the loss function from Equa-
tion (4) will look like those in Figure 4. For C = 0.40,
there is a single inner convex region. For C = 0.45
and C = 0.50, additional local convex regions (fol-
lowed by a non-convex one) arise on the left slope.
For C = 0.55 and C = 0.60, these convex regions con-
vert to additional local minima.
However, the risk associated with an incorrect as-
sumption about convexity is not as severe as in the
case of one or multiple local minima. Using convex
algorithms in a non-convex region is not disastrous:
the only consequence is the loss of guarantee of su-
perlinear convergence speed. A similarly moderate
effect is using non-convex algorithms (e.g., Adam) in
a convex setting. In this sense, it can nothing but be
useful to commit to an optimistic assumption that
• the initial, usually random, parameter state is lo-
cated in a non-convex region with a growing gra-
dient norm and
• the boundary to the convex region is reached after
the gradient norm decreases systematically
as in Figure 1. The expectation of a multidimen-
sional loss function behaving approximately this way
is not unreasonable, although not guaranteed. We will
base our following considerations on this assumption
and check how far they are encountered in real-world
problems. Then, it is possible to approximately iden-
tify the extension of non-convex and convex regions
in algorithmic terms. If the optimization algorithm is
such that it produces a strictly decreasing loss (such
as algorithms using line search), the entry to the con-
vex region can be identified solely by detecting the
point where the gradient norm starts its decrease. If
loss fluctuations on the optimization path appear as
in stochastic gradient methods, it is more reliable to
observe the dependence of the gradient norm on the
loss. In reality, both criteria may be disturbed by a
zigzag optimization path in which the descent across
loss-level curves does not always occur consistently.
Then, some smoothing of the gradient norm curve has
to be performed.
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
80
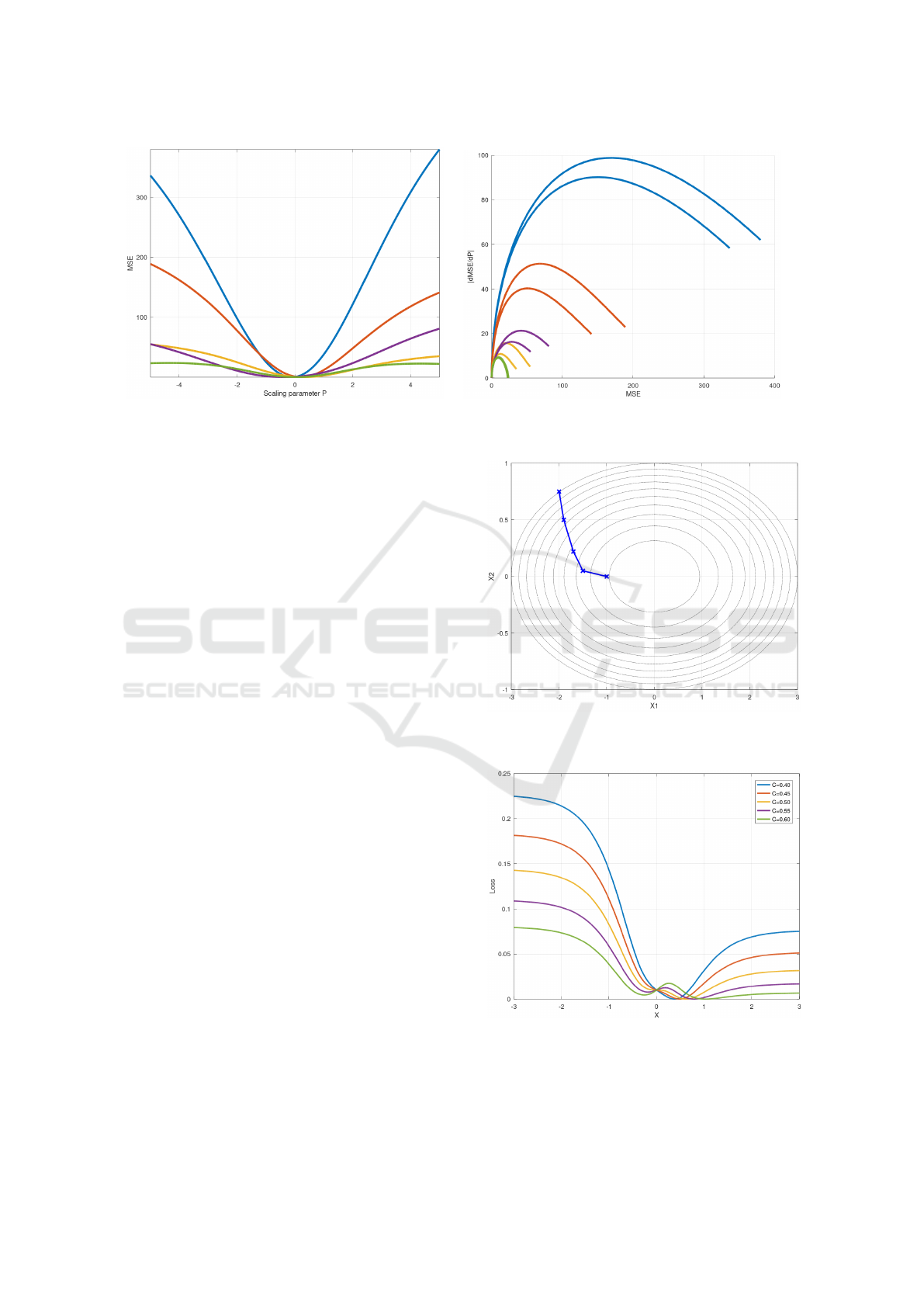
Figure 1: Loss functions of random trivial models. Figure 2: Dependence of the gradient norm on the loss for
the random trivial models.
4 TWO-PHASE OPTIMIZATION
The basic hypothesis is as follows. Second-order nu-
merical optimization methods, such as the Conjugate
Gradient (CG) algorithm, can be assumed to be more
efficient than first-order methods within the convex
region. By contrast, the former methods offer no par-
ticular benefits in the non-convex regions. Then, so-
phisticated first-order methods (such as Adam) may
be substantially more economical in their computa-
tional requirements because they use batch gradients.
To do this, it is crucial to separate both regions dur-
ing optimization. Following the principles presented
in Section 3, the development of the gradient norm
and its relationship with the loss currently attained
can be used to detect the separating boundary.
The preceding ideas about gradient regions sug-
gest a two-phase optimization formulated in Algo-
rithm 1. Consistently with the hypothesis of non-
convex and convex regions following the simple pat-
tern depicted in Section 3, it is necessary to identify
the point where the non-convex region transitions to
the convex one. This point can be recognized with
the help of an increasing or decreasing gradient norm.
The swap point between the non-convex and convex
regions is thus defined as the point where the increase
changes to the decrease.
However, in practical terms, the computed gradi-
ent norm is contaminated by imprecision. In particu-
lar, the Adam algorithm with its batch-wise precess-
ing delivers fluctuating values (as consecutive batches
are different and thus show discontinuities). Gradient
norms of the CG algorithm are nearly continuous, ex-
cept for fluctuations caused by tolerances in the stop-
ping rule of the line search. (This can be observed in
Figure 5.)
This is why a practical rule to identify the swap
Figure 3: Gradient descent across level curves of a 2D pa-
rameter space.
Figure 4: Loss function of a trivial model with two tanh
layers, with various weights C.
point consists in setting a tolerance: a predefined gra-
dient norm level below its peak value (here: 0.9).
A Convexity-Dependent Two-Phase Training Algorithm for Deep Neural Networks
81

The Adam algorithm was used for the first phase
and CG with golden line search (Press et al., 1992)
for the second phase.
Algorithm 1: Two-Phase Algorithm to switch from
Adam to CG when the gradient norm peak has
reached. Model and data are left out for brevity.
Data: nbEpochs > 1
adam ← true;
gnmax ← 0;
gn f act ← 0.9;
for epoch ← 1 to nbEpochs do
if adam then
ADAM();
gn ← GETGRADIENTNORM();
gnmax ← max(gn, gnmax);
adam ← gn > (gnmax ∗ gn f act);
else
CONJUGATEGRADIENT();
end
end
CG has no meta-parameters except for defining
a “zero” gradient norm and a tolerance for termi-
nating the line search. In contrast, some tuning of
Adam’s meta-parameters is necessary to achieve good
performance. The batch size is of particular impor-
tance. Some researchers argue that small batches
exhibit lower losses for training and validation sets,
e.g., (Keskar et al., 2017; Li et al., 2014; Chen
et al., 2022). Consistent with this finding, in our
experiments, batches greater than 512 elements have
shown deteriorating performance (only integer pow-
ers of two have been tested). The convergence was
very slow for batches exceeding 2048 elements (for
even larger batches, even hardly discernible). How-
ever, batches smaller than 512 were also inferior. The
performance of a batch size of 512 was good and ro-
bust for various variants of the models and has been
used in further experiments. This size has, of course,
only an experimental validity for the given datasets
and models.
Whether this two-phase optimization is superior
to conventional algorithms depends on the extension
of the convex region. In general, this extension is
not known. Theoretically, it might be too small for
switching the algorithm to be profitable. In contrast,
optimally converging algorithms may bring essential
benefits in optimum quality and convergence speed.
The alternative that prevails can only be investigated
empirically.
5 COMPUTING EXPERIMENTS
Empirical support for a hypothesis must always be
viewed with skepticism. Nevertheless, many state-
ments about nonlinear models cannot be made in an
ultimate theoretical way, making the resort to empiri-
cal investigation inevitable. Doubts about the validity
will arise if the experimental settings do not represent
the application domain. In today’s world of very large
models, scaling is difficult to cover, as most single
experiments are not feasible with the means of many
research institutions. We have focused on another as-
pect of particular relevance to the shape of the loss
function and, thus, to the relationship between con-
vex and non-convex regions: the variety of model ar-
chitectures. As the most relevant model family based
on transformers, a set of reduced transformer archi-
tectures, in addition to the full transformer, has been
investigated. Furthermore, a different architecture has
been used: the convolutional network VGG5 (analo-
gous to VGG architectures but with only five weight
layers (Simonyan and Zisserman, 2015)). If the re-
sults are consistent with this set of architectures, the
expectation that this will frequently be the case in
practice is justified. The loss criterion has been the
mean squared error (MSE) in all cases.
The first series of experiments examined small
variants of the Vision Transformer (ViT) architec-
ture (Dosovitskiy et al., 2021). These reduced vari-
ants consist of 3 consecutive transformer encoder lay-
ers with each 4 attention heads and a model size (em-
bedding size) of 64, in the reduced forms investigated
in (Bermeitinger et al., 2024):
• vit-mlp: a complete ViT variant with multi-head
attention and multi-layer perceptron (MLP) The
MLP is the typical two-layer neural network with
one nonlinear layer with the number of units set
to 4 times the model size (here: 256 units) and
the activation function gelu, followed by a linear
layer to reduce the dimensions back to 64.
• vit-nomlp: a variant without the MLP, thus saving
many of the original model’s parameters
• vit-nomlp-wkewq: a variant without the MLP and
additionally using a symmetric similarity mea-
sure, using the same matrix for keys and queries
• vit-nomlp-wkewq-wvwo: a minimal variant ad-
ditionally omitting value processing matrices W
v
and W
o
All experiments were performed with well-known
datasets CIFAR-10, CIFAR-100 (Krizhevsky, 2009),
and MNIST (LeCun et al., 1998). Every experiment
consists of comparing
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
82
1. the baseline loss optimization with Adam over
1000 epochs (700 for the MLP variants);
2. an initial optimization with Adam for 300 epochs
(210 with MLP); followed by a further optimiza-
tion with CG over 700 epochs (490 with MLP),
using the result of the preceding Adam optimiza-
tion as an initial parameter state.
All variants have shown a qualitatively similar course
of the epoch-wise gradient norm. The full ViT ver-
sion, including the MLP, is shown for illustration.
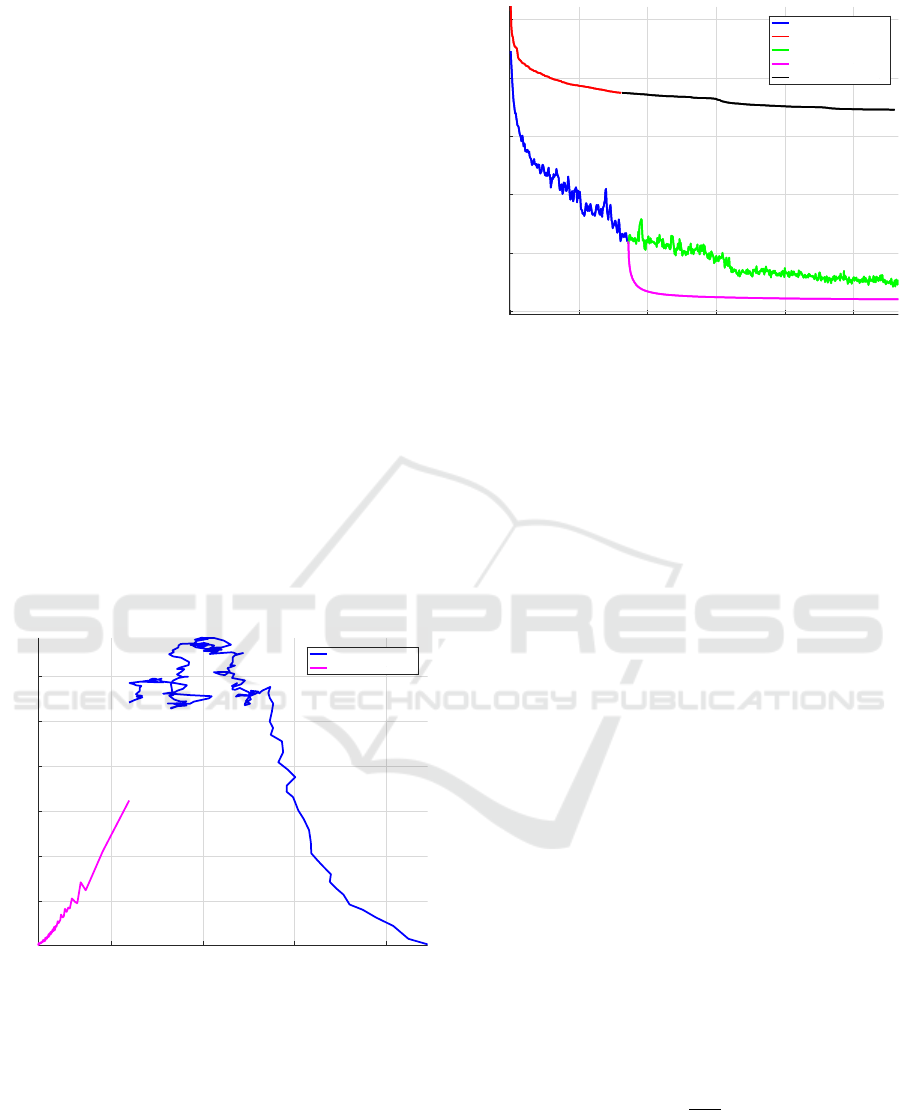
Figure 5 shows the gradient norm in dependence on
the loss (analogy to Figure 2). The x-axis contains the
loss values, the y-axis the gradient norm. Since the
loss decreases during optimization, the training pro-
gresses from right to left along this axis. The gradient
norm values are growing from high loss values (right
margin of the x-axis) towards lower ones. This cor-
responds to the non-convex region, over which opti-
mization takes place with the help of the Adam al-
gorithm. A turning point can be observed at the loss
value of around 0.04: the gradient norm starts to de-
crease. This is qualitatively analogous to the artificial
example of Figure 2 and demonstrates the entry into a
convex region. Because of this convexity, the second-
order CG is used after this turning point. This phase
corresponds to the magenta curve in Figure 5.
0.02 0.04 0.06 0.08
0.02
0.04
0.06
0.08
0.1
0.12
Loss
Grad. norm
Adam Ph.1
CG Ph.2 (<= Adam Ph.1)
Figure 5: Empirical dependence of the gradient norm on
the loss, indicated here on the dataset CIFAR-10 and a ViT
architecture. The training starts at the right side with a
larger loss, decreases to the left, and decreases quickly after
switching from the Adam optimizer to CG.
In Figure 6, the convergence of the loss along a
magnitude approximately proportional to MFLOPS is
depicted. The blue curve shows the first phase of us-
ing Adam and the green curve shows its continuation
(corresponding to using Adam in a typical way). The
second phase loss of CG (magenta curve) decreases
0 1e+06 2e+06 3e+06 4e+06 5e+06
0
0.02
0.04
0.06
0.08
0.1
Epochs X M Params X Training Set Length
Loss
Adam Ph.1
CG Ph.1
Adam Ph.2 (<= Adam Ph.1)
CG Ph.2 (<= Adam Ph.1)
CG Ph.2 (<= CG Ph.1)
Figure 6: Empirical loss function development with alter-
native algorithm sequences on the dataset CIFAR-10 and a
ViT architecture. The most effective strategy is the two-
phase training with Adam (blue) and CG (magenta). For
comparison, the green line shows continuation of the Adam
phase, while the red and black lines show the training purely
done with CG.
considerably faster than its Adam counterpart (green
curve). The traditional Adam optimization over all
700 epochs (the blue curve and its continuation by the
green curve) is visibly inferior to the convergence of
the two-phase algorithm (blue and magenta curve).
The advantage of the two-phase algorithm re-
mains substantial, even considering additional for-
ward passes per epoch spent by line search of CG.
For comparison, using CG in both phases, the loss is
depicted by the red and black curves.
This pattern occurred for all investigated model
variants and datasets (ViT variants and VGG5 with
CIFAR-10, CIFAR-100, and MNIST). The sustained
simplicity of this pattern was striking and somewhat
unexpected. There were no indicators for saddle
points or spurious minima, which would become ap-
parent as regions of a very small gradient norm. Once
the gradient norm peak passed, the second-order op-
timization path became straightforward. The final re-
sults comparing a pure Adam training run and a two-
phase Adam+CG are presented in Table 1.
Furthermore, in terms of performance metrics
loss and accuracy, the overdetermination ratio of
each benchmark candidate has been evaluated (Hrycej
et al., 2023):
Q =
KM
P
(7)
with K being the number of training examples, M be-
ing the length of the output vector (usually equal to
the number of classes) and P being the number of
trainable model parameters.
This formula justifies itself by ensuring that the
A Convexity-Dependent Two-Phase Training Algorithm for Deep Neural Networks
83
Table 1: Final results (loss and accuracy for the training and validation split) from the experiments on the three datasets
MNIST, CIFAR-10, and CIFAR-100 for different variants of ViT and VGG5. The algorithm column indicates the conventional
training with Adam or the proposed second-phase training Adam+CG using the conjugate gradient optimization method.
Model variant Algorithm Train loss Train acc. Val. loss Val. acc. Q
MNIST
vit-mlp Adam 0.0008 0.995 0.0061 0.965 3.9
vit-mlp Adam+CG 0.0001 1.000 0.0044 0.974 3.9
vit-nomlp Adam 0.0003 0.998 0.0064 0.963 11.0
vit-nomlp Adam+CG 0.0002 0.999 0.0053 0.969 11.0
vit-nomlp-wkewq Adam 0.0004 0.998 0.0057 0.967 14.1
vit-nomlp-wkewq Adam+CG 0.0002 0.999 0.0048 0.971 14.1
vit-nomlp-wkewq-wvwo1 Adam 0.0016 0.990 0.0073 0.955 33.5
vit-nomlp-wkewq-wvwo1 Adam+CG 0.0006 0.996 0.0063 0.962 33.5
vgg5-max-relu Adam 0.0001 1.000 0.0014 0.993 4.9
vgg5-max-relu Adam+CG 0.0001 1.000 0.0011 0.994 4.9
CIFAR-10
vit-mlp Adam 0.0091 0.943 0.0997 0.428 3.1
vit-mlp Adam+CG 0.0041 0.970 0.0991 0.435 3.1
vit-nomlp Adam 0.0290 0.819 0.0981 0.428 7.9
vit-nomlp Adam+CG 0.0175 0.891 0.0982 0.444 7.9
vit-nomlp-wkewq Adam 0.0386 0.744 0.0889 0.441 9.9
vit-nomlp-wkewq Adam+CG 0.0270 0.833 0.0881 0.461 9.9
vit-nomlp-wkewq-wvwo1 Adam 0.0567 0.575 0.0775 0.414 19.1
vit-nomlp-wkewq-wvwo1 Adam+CG 0.0527 0.612 0.0738 0.436 19.1
vgg5-max-relu Adam 0.0059 0.967 0.0531 0.710 4.1
vgg5-max-relu Adam+CG 0.0047 0.969 0.0491 0.719 4.1
CIFAR-100
vit-mlp Adam 0.0041 0.706 0.0128 0.155 29.7
vit-mlp Adam+CG 0.0028 0.758 0.0134 0.151 29.7
vit-nomlp Adam 0.0062 0.478 0.0112 0.166 72.6
vit-nomlp Adam+CG 0.0053 0.534 0.0116 0.165 72.6
vit-nomlp-wkewq Adam 0.0069 0.425 0.0108 0.174 88.4
vit-nomlp-wkewq Adam+CG 0.0059 0.487 0.0109 0.176 88.4
vit-nomlp-wkewq-wvwo1 Adam 0.0082 0.291 0.0099 0.157 156.4
vit-nomlp-wkewq-wvwo1 Adam+CG 0.0078 0.326 0.0097 0.164 156.4
vgg5-max-relu Adam 0.0032 0.755 0.0108 0.300 38.9
vgg5-max-relu Adam+CG 0.0032 0.737 0.0102 0.321 38.9
numerator KM is equal to the number of constraints to
be satisfied (the reference values for all training exam-
ples). This product must be larger than the number of
trainable parameters for the system to be sufficiently
determined. Otherwise, there are infinite solutions,
most of which do not generalize. This is equivalent to
the requirement for the overdetermination ratio Q to
be larger than unity. On the other hand, too large Q
values may explain a poor attainable performance —
the model does not have enough parameters to repre-
sent the input/output relationship. This is the case for
CIFAR-100.
For the evaluation of the hypothesis formulated
in Section 3, only the loss values (that is, MSE) on
the training set are significant since this magnitude
is what is directly minimized and thus tests the ef-
ficiency of the minimization algorithm. There, sus-
tained superiority of the two-phase concept can be ob-
served.
Nevertheless, the superiority can also be extended
to the accuracies and the validation set measures. The
extent of the generalization gap (the performance dif-
ference between the training and the validation sets)
varies greatly. In most cases, they can be explained by
the overdetermination ratio: its large values coincide
with a small training gap. This does not apply across
model groups; VGG5 generalizes better than ViT for
given model architectures.
Most models used here do not reach peak perfor-
mances reached by optimally tuned models for image
classification. They are typically substantially smaller
to allow for the experiment series with a sufficient
number of epochs. Low epoch numbers would bring
about the risk of staying in the initial non-convex re-
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
84

gion without approaching the genuine minimum.
6 CONCLUSION
Our empirical results strongly support the hypothe-
sis that loss functions exhibit a predictable convexity
structure proceeding from the initial non-convexity
towards final convexity, enabling targeted optimiza-
tion strategies that outperform conventional methods.
Initial weight parameters (small random values) fall
into the non-convex region, while a broad environ-
ment of loss minimum is convex. The validity of
this hypothesis can be observed in the development of
the gradient norm in dependence on the instantaneous
loss: a norm growing with decreasing loss indicates
non-convexity, while a shrinking norm suggests con-
vexity.
This can be exploited to identify the swap point
(gradient norm peak) between both. Then, an efficient
non-convex algorithm such as Adam can be applied
in the initial non-convex phase, and a fast second-
order algorithm such as CG with guaranteed super-
linear convergence can be used in the second phase.
A set of benchmarks has been used to test the va-
lidity of the hypothesis and the subsequent efficiency
of this optimization scheme. Although they are rel-
atively small to remain feasible with given comput-
ing resources, they cover relevant variants of the ViT
architecture that can be expected to impact convex-
ity properties: using or not using an MLP, defining
the similarity in the attention mechanism symmetri-
cally or asymmetrically, and putting the value vec-
tors of embeddings in a compressed or uncompressed
form (matrices W
v
and W
o
). A completely different ar-
chitecture, the convolutional network VGG5, has also
been tested.
The results have been surprisingly unambiguous.
All variants exhibited the same pattern of the gradient
norm increasing towards a swap point and decreasing
after it. The final losses with a two-phase algorithm
have always been better than those with a single algo-
rithm (Adam). CG alone did not perform well in the
initial non-convex phase, which caused a considerable
lag so that the convex region was not attained. The
same is true with a single exception for CIFAR-100.
An analogical behavior can be observed for the per-
formance of the validation set, which has been admit-
tedly relatively poor for CIFAR-100 because of the
excessive overdetermination with given models — the
parameter sets seem to have been insufficient for im-
age classification with 100 classes. The top-5 accu-
racy on this dataset was more acceptable, over 50 %.
Of course, it must be questioned how far this em-
pirical finding can be generalized to arbitrary archi-
tectures, mainly to large models. One of the very dif-
ficult questions is the convexity structure of loss func-
tions with arbitrary models or even with a model class
relevant to practice. However, it is essential to note
that there is no particular risk when using the two-
phase method. Gradient norms can be automatically
monitored and deviations from the hypothesis can be
identified. If there is evidence against a single gra-
dient norm peak corresponding to the swap point, a
non-convex method can be used to continue as a safe
resort. If the hypothesis can be confirmed, there is an
almost certain reward in convergence speed and accu-
racy.
Nevertheless, the next goal of our work is to verify
the hypothesis on a large text-based model.
REFERENCES
Bermeitinger, B., Hrycej, T., Pavone, M., Kath, J., and
Handschuh, S. (2024). Reducing the Transformer Ar-
chitecture to a Minimum. In Proceedings of the 16th
International Joint Conference on Knowledge Discov-
ery, Knowledge Engineering and Knowledge Manage-
ment, pages 234–241, Porto, Portugal. SCITEPRESS.
Chen, C., Shen, L., Zou, F., and Liu, W. (2022). Towards
practical Adam: Non-convexity, convergence theory,
and mini-batch acceleration. J. Mach. Learn. Res.,
23(1):229:10411–229:10457.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Min-
derer, M., Heigold, G., Gelly, S., Uszkoreit, J., and
Houlsby, N. (2021). An image is worth 16x16 words:
Transformers for image recognition at scale. In In-
ternational Conference on Learning Representations,
page 21, Vienna, Austria.
Ergen, T. and Pilanci, M. (2023). The Convex Landscape of
Neural Networks: Characterizing Global Optima and
Stationary Points via Lasso Models.
Fletcher, R. and Reeves, C. M. (1964). Function minimiza-
tion by conjugate gradients. The Computer Journal,
7(2):149–154.
Fotopoulos, G. B., Popovich, P., and Papadopoulos, N. H.
(2024). Review Non-convex Optimization Method for
Machine Learning.
Hrycej, T., Bermeitinger, B., Cetto, M., and Handschuh,
S. (2023). Mathematical Foundations of Data Sci-
ence. Texts in Computer Science. Springer Interna-
tional Publishing, Cham.
Keskar, N. S., Mudigere, D., Nocedal, J., Smelyanskiy, M.,
and Tang, P. T. P. (2017). On Large-Batch Training for
Deep Learning: Generalization Gap and Sharp Min-
ima.
Kingma, D. P. and Ba, J. (2015). Adam: A Method for
Stochastic Optimization. 3rd International Confer-
ence on Learning Representations.
A Convexity-Dependent Two-Phase Training Algorithm for Deep Neural Networks
85

Kirkpatrick, S., Gelatt, C. D., and Vecchi, M. P. (1983).
Optimization by Simulated Annealing. Science,
220(4598):671–680.
Krizhevsky, A. (2009). Learning Multiple Layers of Fea-
tures from Tiny Images. Dataset, University of
Toronto.
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Levenberg, K. (1944). A method for the solution of cer-
tain non-linear problems in least squares. Quarterly
of Applied Mathematics, 2(2):164–168.
Li, M., Zhang, T., Chen, Y., and Smola, A. J. (2014). Effi-
cient mini-batch training for stochastic optimization.
In Proceedings of the 20th ACM SIGKDD Interna-
tional Conference on Knowledge Discovery and Data
Mining, Kdd ’14, pages 661–670, New York, NY,
USA. Association for Computing Machinery.
Metropolis, N., Rosenbluth, A. W., Rosenbluth, M. N.,
Teller, A. H., and Teller, E. (1953). Equation of State
Calculations by Fast Computing Machines. The Jour-
nal of Chemical Physics, 21(6):1087–1092.
Mockus, J., Eddy, W., and Reklaitis, G. (1997). Bayesian
Heuristic Approach to Discrete and Global Optimiza-
tion: Algorithms, Visualization, Software, and Appli-
cations. Nonconvex Optimization and Its Applica-
tions. Springer US.
Polak, E. and Ribi
`
ere, G. (1969). Note sur la convergence de
m
´
ethodes de directions conjugu
´
ees. Revue franc¸aise
d’informatique et de recherche op
´
erationnelle. S
´
erie
rouge, 3(16):35–43.
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flan-
nery, B. P. (1992). Numerical Recipes in C (2nd Ed.):
The Art of Scientific Computing. Cambridge Univer-
sity Press, USA.
Rinnooy Kan, A. H. G. and Timmer, G. T. (1987). Stochas-
tic global optimization methods part II: Multi level
methods. Mathematical Programming, 39(1):57–78.
Simonyan, K. and Zisserman, A. (2015). Very Deep Con-
volutional Networks for Large-Scale Image Recogni-
tion. ICLR.
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
86
