
A Two-Layer Deep Learning Approach for R&D Partner
Recommendation in the Self-Driving Vehicle Industry
Juite Wang and Ying-Pei Kao
Graduate Institute of Technology Management, National Chung Hsing University, 145 Xingda Rd, Taichung,
Taiwan, Republic of China
Keywords: Self-Driving Vehicles, Partner Recommendation, Patent Analytics, Social Network Analysis,
Deep Neural Networks, Graph Neural Networks.
Abstract: This study presents a two-stage deep learning framework for recommending strategic R&D partners in the
self-driving vehicle (SDV) industry. Leveraging 165,775 U.S. patent applications from 2015 to 2023, we
constructed a co-patent network and extracted node, edge, and topological features to represent organizational
attributes, collaboration intensity, and network structure. These features were integrated using a hybrid Graph
Neural Network (GNN) and Deep Neural Network (DNN) architecture to predict future collaborations. The
model achieved high predictive performance (accuracy = 96.65%, precision = 70.83%, recall = 66.92%, F1 =
68.82%, and AUPRC = 78.93%) and demonstrated its ability to identify both established and emerging
partners. Community detection revealed influential clusters anchored by firms like Toyota and Hyundai. Case
analyses showed that the model can recommend both historical and emerging R&D partners. Compared to
prior work, this study contributes a scalable, data-driven approach that incorporates deep structural and
semantic signals to improve partner selection accuracy. The framework advances patent analytics by linking
network-based learning with partner recommendations, offering practical implications for R&D planning in
complex technology-based industries.
1 INTRODUCTION
The automotive industry is undergoing a profound
transformation driven by self-driving vehicle (SDV)
technologies. These advancements build on artificial
intelligence (AI), big data, 5G, Internet of Things
(IoT), and computer vision. Leading automakers and
technology firms alike are investing in SDV
development, while also seeking external partners to
accelerate innovation. Strategic R&D collaboration
has thus become a critical issue in the competitive
landscape.
The complexity of SDV innovation requires
coordination across hardware, software, and
infrastructure layers. Companies must integrate
capabilities in sensing technologies, real-time
decision-making algorithms, high-definition
mapping, and connectivity. This interdisciplinary
nature not only amplifies technical challenges but
also elevates the strategic importance of effective
partner selection. As competition intensifies, firms
that can identify and secure partnerships with
technically aligned collaborators will gain substantial
advantages in innovation speed and technological
scope.
Despite this urgency, systematic methods for
identifying suitable R&D partners remain limited.
Traditional approaches often rely on prior
relationships, managerial intuition, or firm-level
reputational signals. While helpful, these heuristics
overlook valuable insights embedded in structured
data sources such as patent filings. Patent data reveal
not only technological strengths but also patterns of
past cooperation, citation influence, and topical
complementarities. By transforming patent co-
application information into a relational network, one
can better understand the evolving landscape of
collaboration and anticipate future alliance
opportunities.
SDV development requires integration of diverse
technical domains. No single firm can master all areas,
making partner selection crucial for acquiring
complementary capabilities and accelerating time-to-
market. While prior collaborations provide valuable
signals, identifying future partners based on technical
fit and network dynamics remains a challenging
60
Wang, J. and Kao, Y.-P.
A Two-Layer Deep Learning Approach for R&D Partner Recommendation in the Self-Driving Vehicle Industry.
DOI: 10.5220/0013683100004000
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2025) - Volume 1: KDIR, pages 60-66
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

problem. This challenge is particularly salient in the
SDV context, where the rapid pace of change demands
a forward-looking approach to alliance formation.
Patent data offer a valuable lens for analyzing
R&D collaboration. They reflect firms' technological
focus and inventive activity and, when co-assigned,
signal formalized joint efforts. Studies on R&D
partner selection using patent data can be broadly
categorized into three methodological approaches:
bibliometric analysis (Geum et al., 2013; Wang,
2012), link prediction (Yan & Guns, 2014), and
textual analysis (Kim et al., 2020; Wang et al., 2017).
Yet, significant research gaps remain. First, most
prior studies on partner selection have relied on static
indicators or network metrics. These methods fail to
capture the complex, non-linear interactions among
structural features and R&D collaboration potential.
Second, few studies integrate deep learning with
patent analytics, despite growing evidence that neural
networks can improve pattern recognition in
structured and semi-structured data.
This study aims to develop a two-stage deep
learning model to predict potential R&D partnerships
in the self-driving vehicle industry. Patent data from
the United States Patent and Trademark Office
(USPTO) were collected. Co-applicant patents were
used to build an R&D collaboration network.
Bibliometric indicators, link prediction measures, and
social network analysis were used to generate
features. A two-stage deep learning model,
comprising a GNN and a DNN, was trained to predict
collaboration links.
According to the obtained results, the model
achieved acceptable predictive performance (F1 score
= 68.82, AUPRC = 78.93) by leveraging node, edge,
and topological features extracted from a co-patent
network. Network analysis revealed influential
clusters centered on firms like Toyota and Hyundai,
and the partner recommendation system successfully
identified both established and emerging
collaborators, offering practical insights for strategic
alliance planning.
This study contributes to the literature by (1)
introducing a deep learning-based framework that
unifies node, edge, and topological features; (2)
applying GNN and DNN models to large-scale patent
co-application data; and (3) demonstrating how the
system can generate interpretable partner
recommendations grounded in empirical
collaboration signals.
Section 2 reviews the literature on SDVs and
partner selection. Section 3 outlines the data and
methodological framework. Section 4 presents the
empirical results. Section 5 concludes with future
directions.
2 LITERATURE REVIEW
2.1 Self-Driving Vehicles
SDVs, also referred to as autonomous vehicles,
represent a convergence of several advanced
technologies, including machine learning, sensor
fusion, computer vision, and real-time decision-
making algorithms (Gwak et al., 2019). Research on
SDVs has examined their potential to reduce
accidents, improve traffic flow, and enhance mobility
for underserved populations (Ryan, 2020).
Technological classifications based on SAE levels
have been widely adopted, and attention has
increasingly turned toward regulatory, infrastructural,
and ethical considerations.
In addition to engineering and legal aspects,
researchers have explored the business and ecosystem
implications of SDVs. These include the emergence
of mobility-as-a-service (MaaS), the integration of
SDVs into smart cities, and the disruption of
incumbent value chains (Vosooghi et al., 2019).
However, many of these studies treat technological
development as a monolithic process, overlooking the
collaborative innovation dynamics that drive SDV
advancements.
2.2 Partner Selection and Patent
Analytics
In innovation studies, partner selection has long been
recognized as a determinant of alliance success (Shah
& Swaminathan, 2008). Firms enter R&D
collaborations to access complementary capabilities,
share costs, and reduce uncertainties in technological
exploration (Makri et al., 2010). Effective partner
selection thus requires evaluating not only
organizational fit but also technical and relational
compatibility.
Studies on R&D partner selection using patent
data can be broadly categorized into three
methodological approaches: bibliometric analysis,
link prediction, and textual analysis. Bibliometric
methods use structured metadata such as citations,
classifications, and assignee information to assess
firms’ technological strength and collaborative
potential (Geum et al., 2013; Wang, 2012), though
they are limited by citation delays and outdated
classification systems (Kim et al., 2020). Link
prediction approaches (Yan & Guns, 2014) leverage
A Two-Layer Deep Learning Approach for R&D Partner Recommendation in the Self-Driving Vehicle Industry
61
co-patenting or co-authorship networks to forecast
partnerships based on network topology, but they
often overlook non-structural factors that influence
collaboration decisions (Song et al., 2016). Textual
analysis applies NLP techniques to extract semantic
insights from patent texts, using methods like Subject-
Action-Object (SAO) structures or embedding models
to identify technological similarity (Kim et al., 2020;
Wang et al., 2017), though earlier approaches lacked
deep contextual understanding.
To address the limitations of single-method
approaches, a growing number of studies have adopted
hybrid models that combine multiple analytical
perspectives. For instance, Yoon and Song (2014)
integrated text mining and morphological analysis with
bibliometric indicators to map technological
opportunities and assess partner suitability. Park et al.
(2015) employed latent semantic analysis (LSA) in
conjunction with bibliographic coupling to evaluate
technological proximity among firms. Song et al.
(2016) extracted action-object structures from patent
texts to assess technological needs and then applied
three patent-based indicators to evaluate candidate
partners. Jee and Sohn (2020) used latent Dirichlet
allocation (LDA) topic modeling to identify firms
working in complementary areas, followed by
bibliometric analysis to evaluate technological strength
and relatedness. Qi et al. (2022) applied LDA to both
scientific publications and patent documents to extract
topic-level similarities and then employed link
prediction methods to recommend partners based on
innovation capacity and openness. More recently,
Wang et al. (2025) constructed three interconnected
network layers and introduced three metrics,
technological similarity (patent citation metric),
technological heterogeneity (patent indicators), and
collaboration status (based on link prediction
indicators), to recommend potential R&D partners.
Although these hybrid approaches represent a
meaningful advance over single-method models,
important limitations remain. Most studies do not
fully integrate all three core dimensions, textual
analytics, bibliometric analysis, and network-based
link prediction, within a unified analytical framework.
Moreover, few adopt advanced machine learning
methods capable of modeling complex, non-linear
relationships among diverse features. This
methodological fragmentation restricts the capacity
of existing models to reflect the multifaceted and
dynamic nature of R&D collaboration.
3 DATA AND METHODOLOGY
3.1 Data Collection and Preprocessing
This study collected 197,203 patent applications
related to self-driving vehicles from the United States
Patent and Trademark Office (USPTO) database,
spanning from 2001 to October 2023. To align with
the goal of recommending organizational R&D
partners, all patents filed by individual applicants
were excluded. The final dataset consisted of 165,775
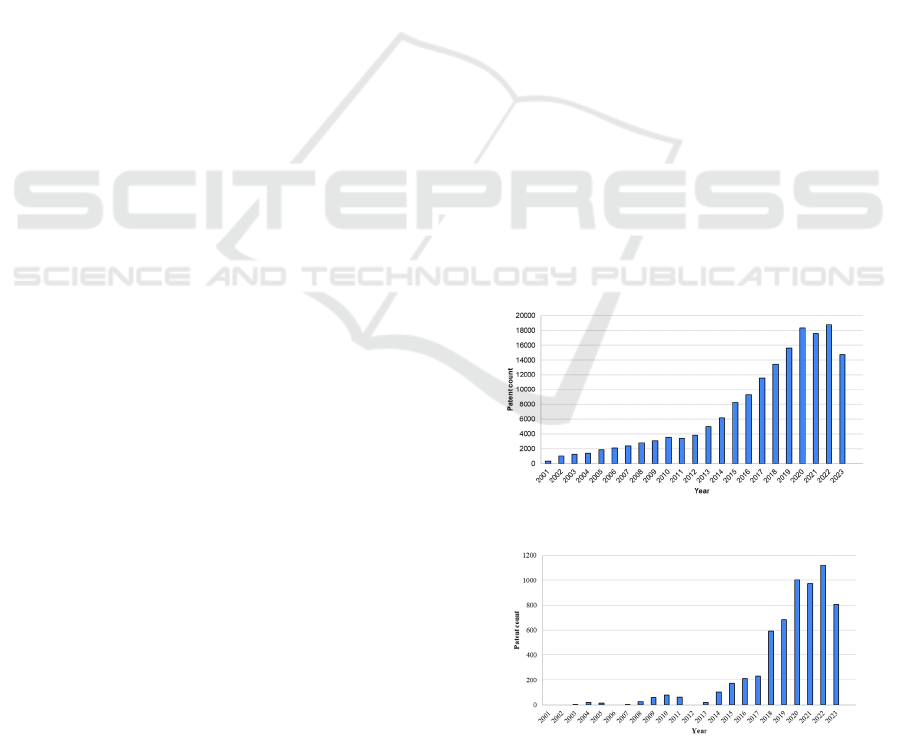
organizational patents. As shown in Figure 1, the
number of SDV-related patent applications has
steadily increased each year, suggesting a growing
market and technological momentum in this domain.
The decline in 2023 filings reflects a lag due to the
required publication and examination period for
patent applications.
Figure 2 further shows that co-patent applications,
those involving collaborations between organizations,
have also grown since 2013. This trend highlights a
rising demand for inter-organizational cooperation in
the SDV industry. Notably, 2015 marks a critical
milestone, with Tesla launching its third-generation
electric vehicle (Model X), signaling the commercial
viability of autonomous driving technologies.
Accordingly, this study focuses on the period from
2015 to 2023, splitting the data into two segments:
Period 1 (2015–2020) and Period 2 (2021–2023), to
support time-aware modeling for potential R&D
partner recommendation.
Figure 1: Yearly trend of patent applications.
Figure 2: Yearly trend of collaborative patents.
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
62
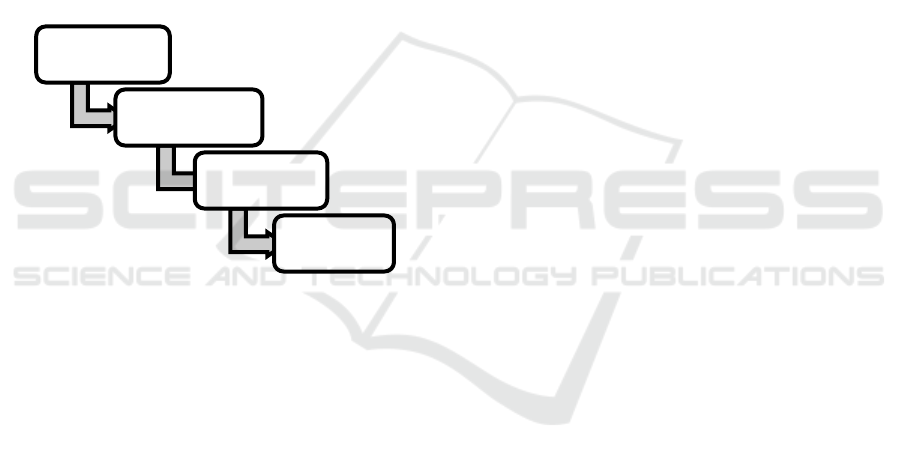
3.2 Methodology
The methodological framework of this study,
illustrated in Figure 3. From the applicant information
in patent records, a collaboration network was
constructed to represent co-application relationships
between organizations. Various indicators were
computed and categorized into three feature groups:
node features, edge features, and topological features.
These served as inputs for a deep learning model
based on Park and Geum (2022), which integrates a
Graph Neural Network (GNN) and a Deep Neural
Network (DNN). In this framework, node features are
processed by the GNN to generate structural
embeddings, which are combined with edge and
topological features in the DNN for link prediction.
This two-stage approach supports accurate prediction
and practical recommendation of R&D partners in the
SDV domain.
Figure 3: Research framework.
3.2.1 Constructing the Collaboration
Network
To construct the collaboration network, each
undirected edge represented at least one jointly filed
patent between two organizations. The adjacency
matrix was defined such that if firms and co-applied
for at least one patent between 2015 and 2020, and
otherwise, where edge weights reflected the number
of co-patents. This network served as the foundation
for feature generation and potential collaboration
prediction tasks.
3.2.2 Defining Features for the DNN Model
Node features (organizational-level) are categorized
into three categories.
Technological strength (Geum et al., 2013) includes:
Patent quantity: number of application and
granted patents;
Patent quality: forward citations of application
and granted patents;
R&D resources: number of inventors and
granted-to-application ratio;
Technological presence: share of total patents
and simple patent family ratio;
Technological impact: proportion of highly
cited (top 10%) patents.
R&D openness (Geum et al., 2013) captures:
Organizational openness: share of co-invented
patents;
Inventor and assignee openness: average
number of nationalities per patent.
Other variables developed in this study include:
Organization nationality (via one-hot
encoding);
Technological fields: A vector indicating the
number of patents held by the organization in
each CPC subclass.
Edge features (dyadic-level) describe collaborative
strength and synergy and consist of two categories.
R&D Linkage (Geum et al., 2013) includes:
Joint R&D capability: Share of patents co-
invented with partners out of the organization’s
total co-invented patents.
Joint application intensity: Share of patents
jointly filed with partners out of all co-invented
patents across organizations.
Joint invention intensity: Share of patents
jointly invented with partners out of all co-
invented patents across organizations.
Collaborative Synergy (Geum et al., 2013) includes:
Knowledge inflow: Ratio of the average
backward citations in partner co-invented
patents to the organization’s overall average.
Knowledge criticality: Ratio of the average
forward citations in partner co-invented patents
to the organization’s overall average.
Knowledge similarity: Sum of shared citations
between the organization and its partner,
normalized by the number of application
patents held by both.
Topological features (network-level) were based on
several link prediction indicators (Mutlu et al., 2020)
and network centrality measures (Hansen et al.,
2011):
Link similarity: common neighbors, shortest
paths, Jaccard index, Salton index, Sorensen
index, preferential attachment, resource
allocation index, Adamic-Adar index, Katz
index.
Node centrality: degree, closeness, and
betweenness centrality.
1. Construct an R&D
collaboration network
2. Define features for
R&D partner
recommendation
3. Construct a two-
stage DNN model
4. Partner
recommendation
A Two-Layer Deep Learning Approach for R&D Partner Recommendation in the Self-Driving Vehicle Industry
63
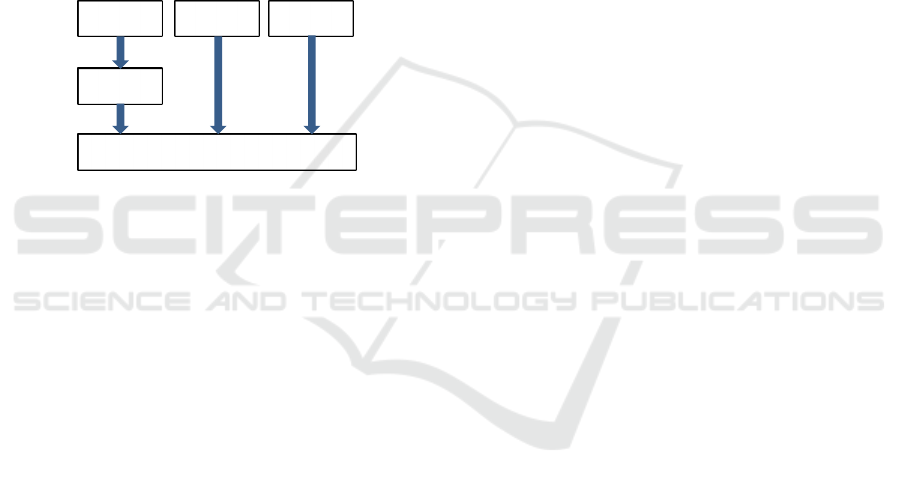
3.2.3 Building a Two-Stage DNN Model
The two-stage deep learning model (Figure 4)
consisted of:
Stage 1: GNN embedding: GraphSAGE
(Hamilton et al., 2017) aggregated each node's
features and neighborhood context into vector
embeddings that preserved local topology and
semantic content.
Stage 2: DNN classifier: The embeddings from
the GNN were concatenated with edge and
topological features and input to a DNN. The
DNN used two hidden layers with ReLU
activation, dropout, and focal loss to address
class imbalance. Training was conducted on the
2015–2020 data, and predictions were
validated against 2021–2023 collaborations.
Figure 4: Two-stage DNN model.
Negative samples were created by randomly
sampling unlinked firm pairs to balance the dataset
for binary classification.
3.2.4 Partner Recommendation
The final output was an R&D partner
recommendation list for each focal organization.
Candidate firms were ranked based on their predicted
link probabilities. The top-N ranked entities
represented high-potential partners with strong
structural and technical fit. These results offer
practical guidance for alliance planning and partner
identification in the self-driving vehicle innovation
ecosystem.
4 RESULTS
4.1 Two-Stage Deep Learning
Performance
The model was trained on 28,203 organization pairs
constructed from 238 firms that collaborated in both
periods. Data were split 70:30 into training and test
sets. Using PyTorch, the two-stage deep learning
framework was implemented: GNN embeddings
were generated from node features, and then
combined with edge and topological features to train
the DNN. Hyperparameters were optimized using
Optuna. The best configuration included a learning
rate of 0.0089, three hidden layers in both GNN and
DNN, Leaky ReLU for GNN activation, ReLU for
DNN, and a MultiStepLR scheduler.
Model performance on the test set showed high
accuracy (96.65%), precision (70.83%), recall
(66.92%), and F1 score (68.82%). The area under the
precision-recall curve (AUPRC) was 78.93,
indicating strong performance across varying
thresholds.
To assess the contribution of each feature set,
separate models were trained using node, edge, or
topological features alone. Results showed that while
all single-feature models achieved reasonable
accuracy, the integrated model outperformed them
across all metrics. Notably, the GNN model yielded
an F1 score of 58.87% and AUPRC of 72.70%, while
edge and topological features were slightly lower.
Combining all three feature sets enhanced precision
and robustness.
4.2 Collaboration Network and Cluster
Analysis
Community detection on the collaboration network
revealed three dominant clusters:
Cluster 1: Centered on Toyota, included 160
organizations, where Toyota, Honda, and
Denso emerged as key nodes across centrality
metrics.
Cluster 2: Led by Hyundai, comprising 101
entities including Kia, LG, and Samsung, with
strong interconnectivity among Korean firms.
Cluster 3: Represented by Volkswagen,
BMW, and Valeo, focusing on European and
U.S. collaborations.
Centrality measures showed Toyota and Hyundai
held the highest degree, betweenness, and
eigenvector centralities within their clusters,
confirming their influence.
4.3 Predicted R&D Collaboration
Network and Partner
Recommendation
Based on the trained two-stage model, this study
predicted potential R&D collaborations for the 2024–
2026 period using patent data from 2021–2023. A
total of 590 likely collaboration pairs were identified,
exceeding the 572 observed links in the prior
Node features
Edge features
Topological
features
GNN model
DNN model
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
64
network. Community detection and centrality
analysis were applied to the predicted network,
revealing new clusters and high-potential
organizations.
Cluster 1: Toyota remained central with the
highest degree, betweenness, and eigenvector
centralities, followed by Honda, Denso, Jtekt,
and Stanford University.
Cluster 2: Hyundai led the second-largest
cluster, with Kia, Samsung, and Korea
Advanced Institute of Science and Technology
also prominently involved.
Cluster 3: Emerging leaders included
Increment P Corp and Pioneer Corp, along with
research institutions such as Fraunhofer and
Northeastern University.
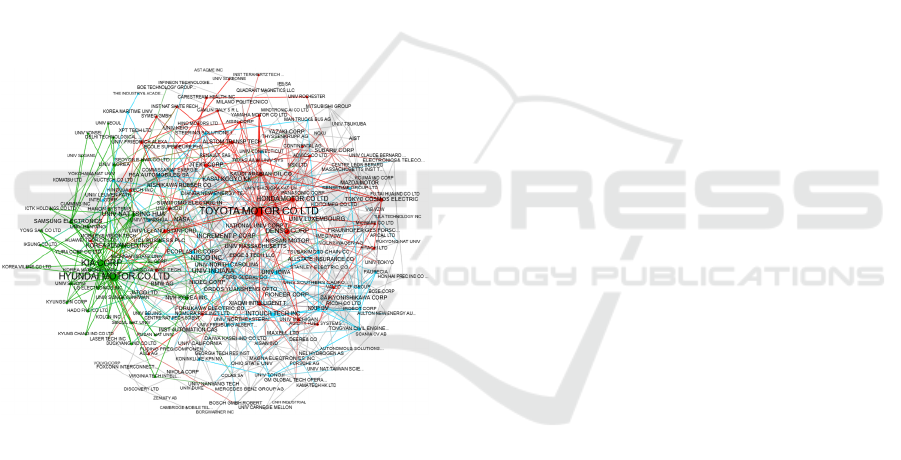
Visualization of the predicted collaboration network
(Figure 5) illustrated the structural role of core firms
and highlighted new connections. Node size reflected
the number of predicted links, while colors indicated
cluster memberships.
Figure 5: Predicted R&D collaboration network.
For example, the Toyota case revealed 35 predicted
partners—most of which were previous collaborators
such as Denso and Subaru, suggesting ongoing
cooperation. However, new recommendations like
Tokyo Cosmos Electric and Pioneer Corp were also
identified based on CPC complementarity. Tokyo
Cosmos Electric, with strengths in B60R and H05B,
shares only one CPC class with Toyota but aligns
with prior Toyota partners like Kojima Ind Corp,
suggesting technical complementarity.
Recommended partners were categorized into:
Existing Partners: reinforcing current
alliances through shared CPC domains (e.g.,
Denso, Subaru).
New Partners: identified based on
complementary CPC profiles and inferred
similarity to Toyota's prior partners (e.g.,
Tokyo Cosmos Electric, Univ Milano
Politecnico).
These results demonstrate the model’s capacity to
uncover both strategic extensions of existing
partnerships and novel opportunities based on
technology fit.
5 CONCLUSIONS
This study developed a DNN framework to predict
potential R&D partnerships in the self-driving vehicle
industry based on patent data. Bibliometric
indicators, link prediction measures, and social
network analysis were used to generate features. A
two-stage deep learning model, comprising a GNN
and a DNN, was trained to predict collaboration links.
The model achieved acceptable predictive
performance by leveraging node, edge, and
topological features extracted from a co-patent
network. The obtained results revealed influential
clusters centered on firms like Toyota and Hyundai,
and the partner recommendation system successfully
identified both established and emerging
collaborators, offering practical insights for strategic
alliance planning.
The limitations of this study are discussed as
follows. First, this study analyzed only SDV related
patent data in the USPTO database. Therefore, it is
not cover patents related to SDV in other countries.
For example, BYD Auto, one of the world's largest
electric vehicle manufacturers in China, has files
most of their patents in China. There are only 15
patents filed in US according to the collected patent
data in this study. Second, this study is restricted to
uncover R&D collaborations using patent data. It may
not be able to find R&D collaboration in other forms,
such as strategic alliance, new venture, and licensing
(Schilling, 2012). Future research can include broader
data sources that can yield a more comprehensive
view of R&D collaboration in industries.
ACKNOWLEDGEMENTS
This research is supported by Grant No. NSTC 113-
2221-E-005-076 -MY2 from the National Science
and Technology Council, R.O.C.
A Two-Layer Deep Learning Approach for R&D Partner Recommendation in the Self-Driving Vehicle Industry
65

REFERENCES
Geum, Y., Lee, S., Yoon, B., & Park, Y. (2013). Identifying
and evaluating strategic partners for collaborative
R&D: Index-based approach using patents and
publications. Technovation, 33(6-7), 211-224.
Gwak, J., Jung, J., Oh, R., Park, M., Rakhimov, M. A. K.,
& Ahn, J. (2019). A Review of Intelligent Self-Driving
Vehicle Software Research [Review]. Ksii
Transactions on Internet and Information Systems,
13(11), 5299-5320. https://doi.org/10.3837/tiis.2019.
11.002
Hamilton, W. L., Ying, R., & Leskovec, J. (2017).
Inductive Representation Learning on Large Graphs.
arXiv:1706.02216. Retrieved June 01, 2017, from
https://ui.adsabs.harvard.edu/abs/2017arXiv17060221
6H
Hansen, D. L., Shneiderman, B., & Smith, M. A. (2011).
Chapter 5 - Calculating and Visualizing Network
Metrics. In D. L. Hansen, B. Shneiderman, & M. A.
Smith (Eds.), Analyzing Social Media Networks with
NodeXL (pp. 69-78). Morgan Kaufmann.
https://doi.org/https://doi.org/10.1016/B978-0-12-3822
29-1.00005-9
Jee, S. J., & Sohn, S. Y. (2020). Patent-based framework
for assisting entrepreneurial firms' R&D partner
selection: Leveraging their limited resources and
managing the tension between learning and protection.
Journal Of Engineering And Technology Management,
57, 101575, Article 101575. https://doi.org/10.1016/j.
jengtecman.2020.101575
Kim, H. J., Kim, T. S., & Sohn, S. Y. (2020).
Recommendation of startups as technology cooperation
candidates from the perspectives of similarity and
potential: A deep learning approach. Decision Support
Systems, 130, 113229.
Makri, M., Hitt, M. A., & Lane, P. J. (2010).
Complementary technologies, knowledge relatedness,
and invention outcomes in high technology mergers and
acquisitions. Strategic Management Journal, 31(6),
602-628. https://doi.org/https://doi.org/10.1002/smj.
829
Mutlu, E. C., Oghaz, T., Rajabi, A., & Garibay, I. (2020).
Review on Learning and Extracting Graph Features for
Link Prediction [Review]. Machine Learning and
Knowledge Extraction, 2(4), 672-704.
https://doi.org/10.3390/make2040036
Park, I., Jeong, Y., Yoon, B., & Mortara, L. (2015).
Exploring potential R&D collaboration partners
through patent analysis based on bibliographic coupling
and latent semantic analysis. Technology Analysis &
Strategic Management, 27(7), 759-781. https://doi.org/
10.1080/09537325.2014.971004
Park, M., & Geum, Y. (2022). Two-stage technology
opportunity discovery for firm-level decision making:
GCN-based link-prediction approach. Technological
Forecasting and Social Change, 183, 121934.
https://doi.org/https://doi.org/10.1016/j.techfore.2022.
121934
Qi, Y., Zhang, X., Hu, Z. Y., Xiang, B., Zhang, R., & Fang,
S. (2022). Choosing the right collaboration partner for
innovation: a framework based on topic analysis and
link prediction. Scientometrics. https://doi.org/
10.1007/s11192-022-04306-9
Ryan, M. (2020). The Future of Transportation: Ethical,
Legal, Social and Economic Impacts of Self-driving
Vehicles in the Year 2025. Science and Engineering
Ethics, 26(3), 1185-1208. https://doi.org/10.
1007/s11948-019-00130-2
Schilling, M. A. (2012). Strategic Management of
Technological Innovation (4th edition ed.). McGraw-
Hill.
Shah, R. H., & Swaminathan, V. (2008). Factors
influencing partner selection in strategic alliances: The
moderating role of alliance context. Strategic
Management Journal, 29(5), 471-494.
https://doi.org/10.1002/smj.656
Song, B., Seol, H., & Park, Y. (2016). A patent portfolio-
based approach for assessing potential R&D partners:
An application of the Shapley value. Technological
Forecasting and Social Change, 103, 156-165.
https://doi.org/10.1016/j.techfore.2015.10.010
Vosooghi, R., Puchinger, J., Jankovic, M., & Vouillon, A.
(2019). Shared autonomous vehicle simulation and
service design. Transportation Research Part C-
Emerging Technologies, 107, 15-33.
https://doi.org/10.1016/j.trc.2019.08.006
Wang, J. F., Wang, N. T., Zhao, W. Y., & Feng, L. J.
(2025). Identifying and evaluating R&D partners via
patent-based multilayer networks from the perspective
of knowledge complementarity: A case study of
unmanned ship technology. Computers & Industrial
Engineering, 204, Article 111085.
https://doi.org/10.1016/j.cie.2025.111085
Wang, M.-Y. (2012). Exploring potential R&D
collaborators with complementary technologies: the
case of biosensors. Technological Forecasting and
Social Change, 79(5), 862-874.
Wang, X., Wang, Z., Huang, Y., Liu, Y., Zhang, J., Heng,
X., & Zhu, D. (2017). Identifying R&D partners
through Subject-Action-Object semantic analysis in a
problem & solution pattern. Technology Analysis &
Strategic Management, 29(10), 1167-1180.
Yan, E., & Guns, R. (2014). Predicting and recommending
collaborations: An author-, institution-, and country-
level analysis. Journal of Informetrics, 8(2), 295-309.
Yoon, B., & Song, B. (2014). A systematic approach of
partner selection for open innovation. Industrial
Management & Data Systems, 114(7), 1068-1093.
KDIR 2025 - 17th International Conference on Knowledge Discovery and Information Retrieval
66
