
Towards Guaranteed Collision Avoidance for Multiple Autonomous
Underactuated Unmanned Surface Vehicles in Restricted Waters
Erick J. Rodr
´
ıguez-Seda
a
Department of Weapons, Robotics, and Control Engineering
United States Naval Academy, Annapolis, MD, U.S.A.
Keywords:
Artificial Potential Field, Collision Avoidance, Multi-Agent Systems, Unmanned Vehicles.
Abstract:
As autonomous surface vessels increasingly operate in restricted and congested waters, the need for dis-
tributed, reactive collision avoidance algorithms becomes more crucial. Traditional avoidance control al-
gorithms are typically conservative, opting for a worst-case scenario approach and restricting the total area
where Unmanned Surface Vehicles (USVs) can navigate. This paper presents a distributed collision avoidance
framework for USVs, based on the concepts of Artificial Potential Field (APF) and avoidance functions, that
aims to reduce the minimum safe distance that vehicles need to keep from obstacles by explicitly consider-
ing their shape, relative position, and relative orientation. The proposed control framework is theoretically
demonstrated and validated through simulations to ensure collision avoidance at all times and to facilitate the
travel of vehicles in obstacle-dense environments.
1 INTRODUCTION
Collision avoidance is arguably one of the most crit-
ical challenges when operating autonomous USVs.
Not only does the USV need to compensate for dis-
turbances such as currents, waves, and wind, but it is
typically subject to underactuation, which restricts the
vehicle’s maneuverability (Er et al., 2023). Further-
more, the environment in which these vehicles oper-
ate is often unknown and dynamic, requiring the im-
plementation of reactive avoidance control strategies.
Several reactive collision avoidance methods for
USVs have been proposed and studied (refer to (Va-
gale et al., 2021; Lyu et al., 2023) for reviews). One
particular approach of interest due to their relative
ease of analysis and implementation is the use of
APF functions. APF-based methods use repulsive
forces around obstacles to maneuver away from a col-
lision (Xue et al., 2009). These forces can then be
shown, via Lyapunov-based analysis, to guarantee the
safety of a large number of vehicles (Stipanovi
´
c et al.,
2007). Examples in the literature for USVs vary based
on the vehicle’s maneuverability and the compliance
with other restrictions and regulations (Li et al., 2021;
Zhang et al., 2022; Li et al., 2025). Yet a common
drawback of these APF-based strategies is the treat-
ment of vehicles and obstacles as points or objects of
a
https://orcid.org/0000-0003-1108-4329
circular shape. This assumption simplifies the analy-
sis and implementation of control algorithms, but ar-
tificially increases the minimum distance that agents
need to keep from each other by assuming a worst-
case scenario. One solution to reduce this conser-
vatism is the modeling of obstacles and vehicles as
a set of multiple smaller spheres, hence reducing the
agent’s footprint at the expense of increasing the num-
ber of obstacles and artificial potential field functions.
Alternatively, one can wrap the vehicles and ob-
stacles with a convex envelope that considers not only
their shape but also their relative position and orien-
tation. For instance, the work in (Rodr
´
ıguez-Seda,
2024b; Rodr
´
ıguez-Seda, 2024a) defines the repulsive
potential field as a function of the vehicles and obsta-
cles’ relative position, orientation, and shape. In con-
trast to the use of a constant distance, as in the case
of agents of circular shape, the work in (Rodr
´
ıguez-
Seda, 2024b; Rodr
´
ıguez-Seda, 2024a) uses a contin-
uous, differentiable, non-constant distance function
that is typically smaller than the radius of the mini-
mum enclosing circle. Such an approach is shown to
safely allow the travel of multiple nonholonomic, un-
deractuated ground vehicles through narrow passages
and highly occluded spaces.
In this paper, we apply the avoidance con-
trol concept developed in (Rodr
´
ıguez-Seda, 2024b;
Rodr
´
ıguez-Seda, 2024a) for ground vehicles with no-
Rodríguez-Seda, E. J.
Towards Guaranteed Collision Avoidance for Multiple Autonomous Underactuated Unmanned Surface Vehicles in Restricted Waters.
DOI: 10.5220/0013678700003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 53-59
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
53

slip constraints to underactuated USVs subject to
sway and surge motion. We propose a distributed con-
trol law for an arbitrary number of vehicles and static
obstacles and show, via Lyapunov-based analysis, that
if the vehicles start from a safe state and their veloci-
ties are non-zero while they try to resolve the conflict,
the vehicles are guaranteed to avoid collisions. A sim-
ulation example with four USVs traveling through a
narrow passage illustrates the benefits of the proposed
approach.
2 PROBLEM FORMULATION
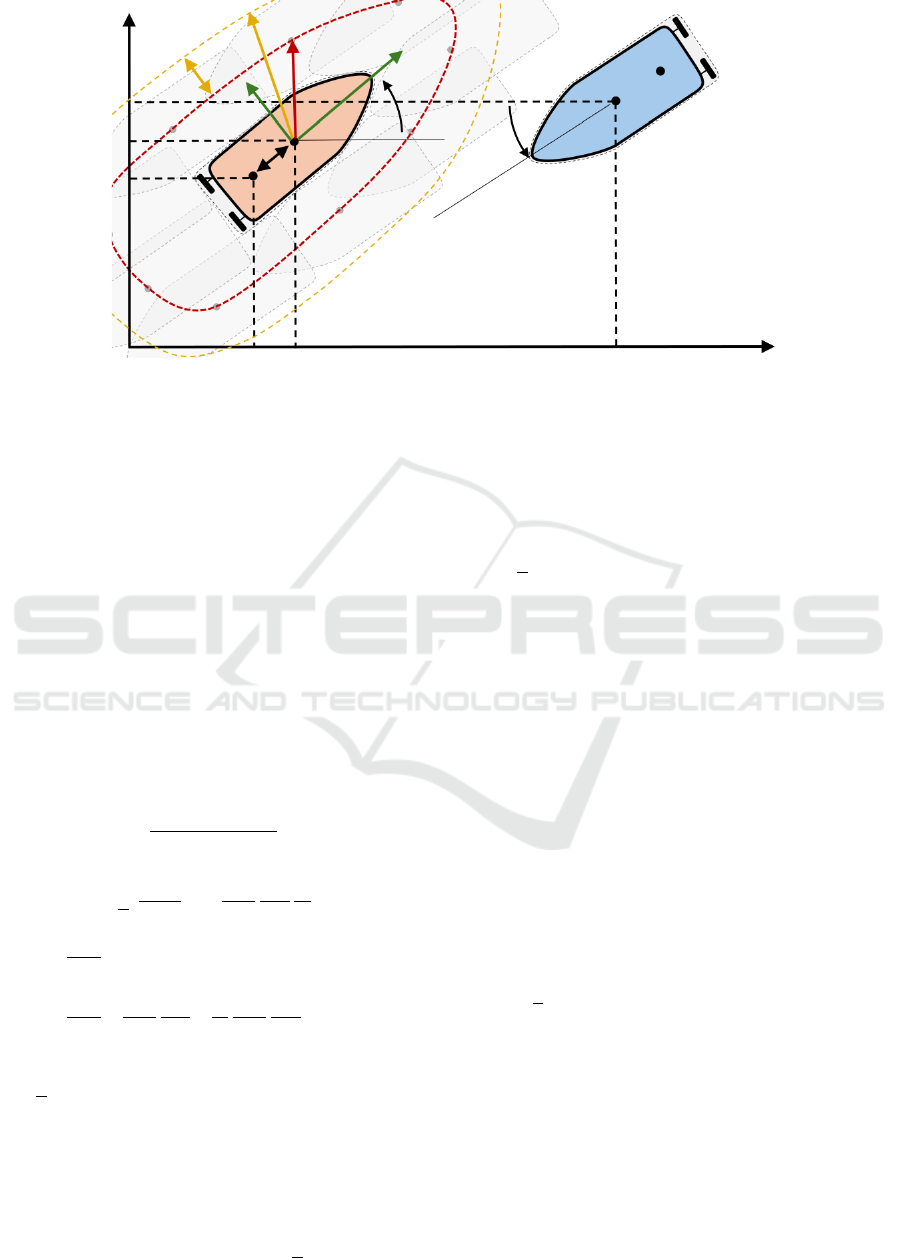
We consider the task of safely coordinating the mo-
tion of N heterogeneous, underactuated USVs. Let
x
i
(t) and y
i
(t) represent the position coordinates of
the center of mass and ψ
i
(t) be the orientation in the
Earth-fixed frame for the ith vehicle (refer to Fig-
ure 1). Assume that the vehicle is neutrally buoyant.
Then, the nonlinear kinematic and dynamic equations
of motion of the ith USV in still water are given by
˙x
i
(t) =u
i
(t)cos ψ
i
(t) − v
i
(t)sin ψ
i
(t) (1a)
˙y
i
(t) =u
i
(t)sin ψ
i
(t) + v
i
(t)cos ψ
i
(t) (1b)
˙
ψ
i
(t) =ω
i
(t) (1c)
˙u
i
(t) =
m
2i
m
1i
v
i
(t)ω
i
(t) −
d
1i
m
1i
u
i
(t) +
f
i
(t)
m
1i
(1d)
˙v
i
(t) = −
m
1i
m
2i
u
i
(t)ω
i
(t) −
d
2i
m
2i
v
i
(t) (1e)
˙
ω
i
(t) =
m
1i
− m
2i
m
3i
u
i
(t)v
i
(t) −
d
3i
m
3i
ω
i
(t) +
τ
i
(t)
m
3i
(1f)
where u
i
(t) and v
i
(t) are the surge and sway speeds,
ω
i
(t) is the yaw rate, f
i
(t) and τ
i
(t) are the control
force and torque inputs, and m
ji
> 0 and d
ji
> 0 are
the mass and damping terms for j ∈ {1, 2,3} (Rey-
hanoglu, 1996; Fossen, 2021). The control objective
is to design
1
f
i
and τ
i
such that the ith vehicle is sta-
bilized at a desired configuration while avoiding col-
lisions with other USVs and obstacles.
It is well known that the position and orientation
of (1) cannot be simultaneously stabilized at a desired
value using a continuous (Brockett, 1983) or, even,
a discontinuous (Pettersen and Egeland, 1996) state
feedback control law. Therefore, this paper proposes
the use of input-output feedback linearization control
law, where the objective is to regulate the position of
a reference point in front of (x
i
,y
i
) given by
z
1i
=x
i
+ L
i
cosψ
i
, z
2i
=y
i
+ L
i
sinψ
i
(2)
1
In what follows, we will omit the time argument of
signals unless deemed necessary.
where L
i
> 0 is a constant parameter and z
i
=
[z
1i
,z
2i
]
T
are the Cartesian coordinates of the ref-
erence point (Rodr
´
ıguez-Seda et al., 2014; Paliotta
et al., 2018). Now, differentiating twice equation (2)
and applying the following control force and torque
f
i
τ
i
=
m
1i
cosψ
i
m
1i
sinψ
i
−m
3i
sinψ
i
L
i
m
3i
cosψ
i
L
i
w
1i
− F
i
w
i2
− G
i
(3)
F
i
=−
m
2i
ω
i
v
i
+ d
1i
u
i
m
1i
cosψ
i
+
d
2i
v
i
+ m
1i
u
i
ω
i
m
2i
sinψ
i
+
(m
2i
− m
1i
)u
i
v
i
+ d
3i
ω
i
m
3i
L
i
sinψ
i
− u
i
ω
i
sinψ
i
+ v
i
ω
i
cosψ
i
− L
i
ω
2
i
cosψ
i
G
i
=
−
m
2i
ω
i
v
i
+ d
1i
u
i
m
1i
sinψ
i
−
d
2i
v
i
+ m
1i
u
i
ω
i
m
2i
cosψ
i
−
(m
2i
− m
1i
)u
i
v
i
+ d
3i
ω
i
m
3i
L
i
cosψ
i
+ u
i
ω
i
cosψ
i
− v
i
ω
i
sinψ
i
− L
i
ω
2
i
sinψ
i
one can show that (1) reduces to
¨
z
i
=w
i
(4a)
˙
ψ
i
=
1
L
i
[−sin ψ
i
cosψ
i
]
˙
z
i
−
v
i
L
i
(4b)
where w
i
= [w
1i
,w
2i
]
T
is the new control input for the
linearized system. While the internal dynamics (4b)
can only be shown to be Lagrange stable, the linear
dynamics of the reference point (4a) are controllable.
That is, for a any desired position z
di
∈ R
2
, one can
design a state feedback control law w
i
such that z
i
→
z
di
as t → ∞.
To formulate the collision avoidance objective,
consider the interaction of a pair of vehicles as illus-
trated in Figure 1. Note that the minimum safe dis-
tance (or envelope) between both vehicles, denoted
as r
i j
, is a function of their relative position and ori-
entations
r
i j
:= r
i j
(z
i
,z
j
,ψ
i
,ψ
j
) = r
ji
(z
j
,z
i
,ψ
j
,ψ
i
). (5)
That is, r
i j
depends on the shape of the vehicles and
on how the jth USV or obstacle is positioned and ori-
ented with respect to the ith vehicle. A collision is
said to take place if
z
i
− z
j
≤ r
i j
for some time
t ≥ 0. It is assumed that one can find an envelop
function r
i j
that is continuously differentiable with
bounded derivative and that the USVs can detect, ei-
ther via communication or onboard sensors, the rel-
ative position and orientation of other agents within
a bounded detection radius R > sup
i, j̸=i
{r
i j
+ ∆
R
},
where ∆
R
> 0 denotes the reaction gap distance. The
reaction distance, R
i j
= R
ji
= r
i j
+∆
R
, defines the dis-
tance at which the vehicles start avoiding each other
(see Figure 1).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
54
∆
R
x
i
z
1 j
z
1i
y
i
z
2i
z
2 j
r
i j
u
i
v
i
ψ
i
L
i
−ψ
j
R
i j
Figure 1: Minimum safe distance between two USVs considering their shape, relative positions, and relative orientations.
Having defined the minimum safe distance, one
can formulate the control objective as follows. Design
a control strategy w
i
such that z
i
→ z
di
as t → ∞ and
z
i
− z
j
> r
i j
∀ i, j ̸= i,t ≥ 0, where z
di
is the desired
position.
3 CONTROL FRAMEWORK
To achieve the control objective, we propose a decen-
tralized control law based on the concept of avoidance
control (Leitmann and Skowronski, 1977)
w
i
= K
i
(z
di
− z
i
) − D
i
˙
z
i
+ p
i
−
∑
j∈N
i
a
i j
(6a)
N
i
= { j ̸= i |
z
i
− z
j
≤ R
i j
} (6b)
A
i j
=
min
(
0,
z
i
− z
j
2
− R
2
i j
z
i
− z
j
2
− r
2
i j
)!
2
(6c)
D
i
= max
(
d,
1
∥
˙
z
i
∥
2
∑
j∈N
i
∂A
i j
∂r
i j
∂r
i j
∂ψ
i
v
i
L
i
)
(6d)
p
i
=
µ
i
∥
˙
z
i
∥
[−˙z
2i
˙z
1i
]
T
, if N
i
̸=
/
0 (6e)
a
i j
=
∂A
T
i j
∂z
i
+
∂A
i j
∂r
i j
∂r
i j
∂z
i
T
+
1
L
i
∂A
i j
∂r
i j
∂r
i j
∂ψ
i
−sin ψ
i
cosψ
i
(6f)
where K
i
is a positive definite constant matrix, µ
i
̸= 0
and d > 0 are constants, N
i
is the set of agents within
the ith USV’s reaction distance, and A
i j
is the avoid-
ance function (Stipanovi
´
c et al., 2007; Rodr
´
ıguez-
Seda, 2024b). The first two terms in (6) represent
the proportional derivative action aimed at stabiliz-
ing the system at the desired configuration, where
D
i
, the damping coefficient, is assumed to be a time-
varying function lower-bounded by d. The last term,
∑
j∈N
i
a
i j
, is the collision avoidance control, while p
i
is a perturbation to incentivize a non-zero velocity of
the reference point while the avoidance control is ac-
tive and to facilitate the avoidance of deadlocks. Note
that, when there are no obstacles or other vehicles
within the USV’s reaction distance, a
i j
= p
i
= 0 and
D
i
= d.
Assumption 1. The velocity of the ith vehicle’s refer-
ence point is non-zero when the avoidance control is
active. That is,
∥
˙
z
i
∥
̸= 0 if A
i j
> 0 for some j.
Assumption 1 may not be satisfied in some spe-
cial cases, such as in environments with dead-ends or
traps. To avoid such cases, the proposed framework
incorporates a control perturbation (6e) that aims to
keep the vessel in motion by making it rotate when
the vehicle is almost stationary.
Theorem 1 (Collision Avoidance). Consider the sys-
tem in (1) with control law (3) and (6). Assume that
z
di
is constant, that
z
i
(0) − z
j
(0)
> r
i j
∀ i, j ̸= i,
and that Assumption 1 holds. Then,
z
i
(t) − z
j
(t)
>
r
i j
∀ t ≥ 0.
Proof. Consider the following Lyapunov function
V =
1
2
N
∑
i=1
K
i
∥
z
i
− z
di
∥
2
+
∥
˙
z
i
∥
2
+
∑
j∈N
i
A
i j
!
(7)
Towards Guaranteed Collision Avoidance for Multiple Autonomous Underactuated Unmanned Surface Vehicles in Restricted Waters
55

Taking its time derivative yields
˙
V =
N
∑
i=1
K
i
(z
i
− z
di
)
T
˙
z
i
+
˙
z
T
i
w
i
+
N
∑
i=1
∑
j∈N
i
∂A
i j
∂z
i
˙
z
i
+
∂A
i j
∂r
i j
∂r
i j
∂z
i
˙
z
i
+
∂A
i j
∂r
i j
∂r
i j
∂ψ
i
˙
ψ
i
| {z }
=
1
2
∑
N
i=1
∑
j∈N
i
∂A
i j
∂z
i
˙
z
i
+
∂A
i j
∂r
i j
∂r
i j
∂z
i
˙
z
i
+
∂A
i j
∂r
i j
∂r
i j
∂ψ
i
˙
ψ
i
+
1
2
∑
N
i=1
∑
j∈N
i
∂A
i j
∂z
j
˙
z
j
+
∂A
i j
∂r
i j
∂r
i j
∂z
j
˙
z
j
+
∂A
i j
∂r
i j
∂r
i j
∂ψ
j
˙
ψ
j
.
Now, substituting (6) and (4b) into the above equation
and canceling all applicable terms yields
˙
V =
N
∑
i=1
−D
i
∥
˙
z
i
∥
2
+
∑
j∈N
i
∂A
i j
∂r
i j
∂r
i j
∂ψ
i
v
i
L
i
!
≤ 0
where we used Assumption 1 and (6d). Since
˙
V ≤ 0,
we have that V is non-increasing and bounded by
V (0) for all t ≥ 0. Now, suppose that for for a pair
of agents
z
i
(t) − z
j
(t)
→ r
i j
for some t. The lat-
ter would imply that A
i j
→ ∞ ⇒ V → ∞, which is a
contradiction. Since the solutions of equation (4a) are
continuous, one has that
z
i
(t) − z
j
(t)
> r
i j
for all
t ≥ 0 and the proof is complete.
Theorem 1 guarantees the safe transit of an arbi-
trary large number of USVs assuming they all start
from a safe state and that they remain in motion while
resolving a conflict.
Theorem 2 (Position Stabilization). Assume ∃T
0
≥ 0
such that A
i j
= 0 ∀ t ≥ T
0
, j ∈ {1,· ·· , N}/i. Then,
z
i
(t) → z
di
,
˙
z(t) → 0, and
˙
ψ
i
(t) → 0.
Proof. Define the error signals as e
i
= z
di
− z
i
and
consider the Lyapunov candidate function
W = K
i
∥
e
i
∥
2
+
1
2
∥
˙
e
i
∥
2
+
1
2
∥
de
i
+
˙
e
i
∥
2
.
Taking its time derivative and noting that D
i
= d and
a
i j
= p
i
= 0 for all j ∈ {1,·· · ,N} and t ≥ T
0
, one can
show that
˙
W = − K
i
d
∥
e
∥
2
− d
∥
˙
e
i
∥
2
, ∀t ≥ T
0
which implies that z
di
− z
i
and
˙
z converge exponen-
tially to zero as t → 0. Then, manipulating (1) and
(4), one can obtain that u
i
= [cos ψ
i
sinψ
i
]
˙
z
i
, which,
in turns, implies that u
i
→ 0 exponentially as t → 0.
Similarly, substituting (4b) into (1e) yields that
˙v
i
=
m
1i
u
i
m
2i
L
i
[sinψ
i
− cos ψ
i
]
˙
z
i
+
m
1i
u
i
m
2i
L
i
v
i
−
d
2i
m
2i
v
i
. (8)
Now, since u
i
→ 0 exponentially, ∃
¯
T
0
≥ T
0
such that
|u
i
| < u
0i
= d
2i
L
i
/m
1i
∀t ≥
¯
T
0
. Returning to (8) one
obtains that
˙v
i
=
m
1i
u
0i
m
2i
L
i
[sinψ
i
− cos ψ
i
]
˙
z
i
−
d
2i
m
2i
−
m
1i
u
0i
m
2i
L
i
v
i
(9)
for all t ≥
¯
T
0
. Now, consider the following Lyapunov
function W =
1
2
v
2
i
. Differentiating with respect to
time yields
˙
W =
m
1i
u
i0
m
2i
L
i
[sinψ
i
− cos ψ
i
]
˙
z
i
v
i
−
d
2i
m
2i
−
m
1i
u
0i
m
2i
L
i
v
2
i
≤
m
1i
u
i0
m
2i
L
i
∥
˙
z
i
∥
|v
i
| −
d
2i
m
2i
−
m
1i
u
0i
m
2i
L
i
v
2
i
≤ − κv
2
i
, ∀ |v
i
| ≥
m
1i
u
i0
m
2i
L
i
(1 − κ)
∥
˙
z
i
∥
where κ ∈ (0,1). Treating
˙
z
i
as the input to (9), one
can conclude that (9) is input-to-state stable (Khalil,
2002). Therefore, if
˙
z
i
→ 0, so does v
i
→ 0, which in
turns implies that
˙
ψ
i
→ 0 and the proof is complete.
Theorem 2 establishes that, under no collision
threat, the proposed control law is able to stabilize
the reference point at a desired location in a fixed ori-
entation. In general, we are more interested in the
problem of driving the USV along a desired path or
to visit a sequence of waypoints. For example, let
{χ
i,1
,χ
i,2
,· ·· , χ
i,m
} be an ordered sequence of m way-
points for the ith vehicle and let
¯
M > 0 be the switch-
ing distance threshold. Then, the desired configura-
tion can be updated as z
di
(t) = χ
i,k
, ∀t ≥ 0, where
k = 1 for t = 0 and
k =
(
k, if
z
i
(t) − χ
d
i,k
>
¯
M
k + 1, otherwise
for k ∈ [2,m − 1].
4 MINIMUM SAFE DISTANCE
One of the main contributions of the proposed ap-
proach is the use of a tighter minimum safe distance,
r
i j
, that takes into account not only the shape of the
vehicles and obstacles but also their relative position
and orientation. This is in contrast to conventional
APF-based methods that assume objects are of spher-
ical form, yielding always a conservative, worst-case
scenario, minimum safe distance.
In the control framework (3) we assumed that
a differentiable continuous function r
i j
(z
i
,z
j
,ψ
i
,ψ
j
)
can be formulated in closed-form. Following the
work of (Rodr
´
ıguez-Seda, 2024b; Rodr
´
ıguez-Seda,
2024a), here we present a closed-form of r
i j
for vehi-
cles and obstacles whose shape can be approximated
by rectangles of different lengths and widths.
Assume the ith and jth vehicles (or obstacles) can
be approximated by rectangles with length ℓ
i
, ℓ
j
and
width λ
i
, λ
j
. Without loss of generality, let their
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
56

lengths be aligned with the x-axis and define the fol-
lowing orientation-dependent functions
β
i j
=
ℓ
i
2
+
ℓ
j
2
q
ε
2
+ cos
2
˜
ψ
i j
+
λ
j
2
q
ε
2
+ sin
2
˜
ψ
i j
γ
i j
=
w
i
2
+
ℓ
j
2
q
ε
2
+ sin
2
˜
ψ
i j
+
λ
j
2
q
ε
2
+ cos
2
˜
ψ
i j
where ε > 0 is a small constant chosen for smoothness
and
˜
ψ
i j
= ψ
i
− ψ
j
is the agents’ relative orientation.
Let θ
i j
= atan2(z
2 j
−z
2i
,z
1 j
−z
1i
) represent the angle
between z
i
and z
j
. Then, the minimum safe distance
between both agents can be upper bounded by
r
i j
= r
ji
=
δ
s
2
ρ
−δ
i j
+ ρ
−δ
ji
(10)
where δ ≥ 2 is a constant parameter and
ρ
pq
=
2β
pq
γ
pq
ζ
pq
+ η
pq
− 2ε
ζ
pq
=
q
ε
2
+ (γ
pq
cos(θ
pq
− ψ
p
) + β
pq
sin(θ
pq
− ψ
p
))
2
η
pq
=
q
ε
2
+ (γ
pq
cos(θ
pq
− ψ
p
) − β
pq
sin(θ
pq
− ψ
p
))
2
for p, q ∈ {i, j}. It is worth noting that choosing
smaller ε → 0 and larger δ → ∞ yields tighter bounds
on the minimum safe distance at the expense of larger
changes in the r
i j
, i.e., larger ∂r
i j
/∂z
i
and ∂r
i j
/∂ψ
i
terms.
5 SIMULATIONS
We now present simulation results with the conven-
tional APF approach of assuming obstacles of circular
shape and the proposed avoidance control framework.
We consider four USVs modeled according to (1)
with parameters given as m
1i
= 200 kg, m
2i
= 250 kg,
m
3i
= 80 kg · m
2
, d
1i
= 70 kg/s, d
2i
= 100 kg/s,
and d
3i
= 50 kg · m
2
/s (Reyhanoglu, 1996) for i ∈
{1,2, 3,4}. The vehicles are assumed to have length
ℓ
i
= 4 m and width λ
i
= 0.5 m, with the center of
rotation located at 0.33 m from the vehicle’s geomet-
ric center. The workspace, illustrated in the top dia-
gram of Figure 2, consists of a 10 m long, 4 m wide
rectangular passage and a 3 m diameter circular static
obstacle. For the avoidance control, the structure cre-
ating the passage is modeled as a group of 5 m long,
square-shaped obstacles. The vehicles are tasked with
traveling through the passage by following a series of
waypoints denoted by the small open square shapes,
with a switching distance threshold of
¯
M = 1.5 m.
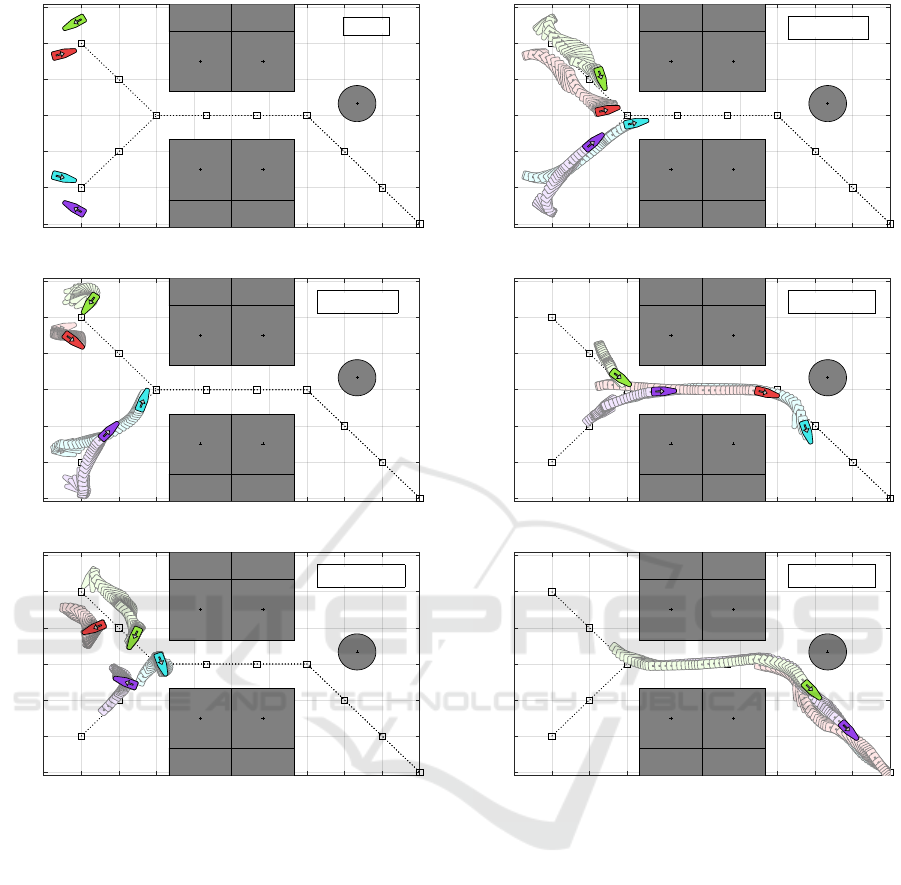
We first simulated the case in which vehicles and
obstacles are approximated by circular shapes. In this
scenario, the minimum safe distance is constant, i.e.,
r
i j
=
q
(
ℓ
i
2
)
2
+ (
λ
i
2
)
2
+
q
(
ℓ
i
2
)
2
+ (
λ
i
2
)
2
, and the con-
trol law in (3) reduces to
w
i
= K
i
(z
di
− z
i
) − d
˙
z
i
+ p
i
−
∑
j∈N
i
∂A
T
i j
∂z
i
where p
i
has been kept to ease the avoidance of dead-
locks. The control parameters are taken as ∆
R
= 2 m,
K
i
= 1.25I
2×2
, µ
i
= (−1)
i
, and d = 6. The geomet-
ric center of the vehicles is chosen as the reference
point, i.e., L = 0.67 m. The simulation results are il-
lustrated in Figure 2. Note that the first and second
vehicles take nearly 15 s to resolve their first conflict,
which was converging to the first waypoint (refer to
the middle diagram in Figure 2). Eventually, all ve-
hicles move toward the passage, but none of them
is able to travel through. Instead, all four USVs re-
mained in a deadlock.
We then simulated the multi-vehicle system with
the proposed avoidance control (3) keeping same con-
trol parameters with the addition of ε = 0.01 and δ = 6
for the definition of r
i j
. The results are shown in Fig-
ure 3. The vehicles are in close proximity of each
other and the obstacles within the first 15 s. However,
they are able to solve the conflicts and one by one is
able to navigate safely through obstacles and the nar-
row passage, avoiding collisions at all times.
6 CONCLUDING REMARKS
This paper proposed a novel distributed, cooperative
collision avoidance control framework for an arbitrar-
ily large group of autonomous, underactuated USVs
in restricted and congested waters. The control frame-
work is built on the concepts of APF and avoidance
functions to guarantee the collision-free transit of ves-
sels under some mild assumptions. The novelty of the
approach relies on the use of a non-constant minimum
safe radius that takes into account the shape and the
relative position and orientation of vehicles and ob-
stacles. The result is a reduction in the minimum safe
distance that vehicles must keep from each other and
other obstacles, allowing them to maneuver in nar-
row and obstacle-dense waters. We mathematically
show that the proposed control framework guarantees
collision avoidance at all times as long as the vehicle
maintains a non-zero velocity while in conflict, which
can be enforced by forcing them to rotate. Simulation
results with four vehicles in restricted waters demon-
strated the advantage of the proposed approach over
traditional APF-based methods.
Future research should investigate the ability of
the vehicles to avoid collisions without the assump-
Towards Guaranteed Collision Avoidance for Multiple Autonomous Underactuated Unmanned Surface Vehicles in Restricted Waters
57
-15 -12 -9 -6 -3 0 3 6 9 12 15
x (m)
-9
-6
-3
0
3
6
9
y (m)
z
2
z
1
z
3
z
4
t = 0 s
-15 -12 -9 -6 -3 0 3 6 9 12 15
x (m)
-9
-6
-3
0
3
6
9
y (m)
t ∈ [0 s,15 s]
-15 -12 -9 -6 -3 0 3 6 9 12 15
x (m)
-9
-6
-3
0
3
6
9
y (m)
t ∈ [15 s,60 s]
Figure 2: Sequential motion of the multi-vehicle system un-
der the traditional approach of assuming a constant mini-
mum safe distance. The top diagram illustrates the initial
configuration. The two bottom plots illustrate the motion of
the vehicles from t = 0 s to t = 60 s. Positions and orienta-
tions are superimposed every 0.5 s.
tion of non-zero velocity. In addition, we plan to
formulate the proposed minimum safe distance and
avoidance functions for vehicles and obstacles of
other shapes and to include water disturbances, such
as currents or waves, into the analysis.
REFERENCES
Brockett, R. W. (1983). Asymptotic stability and feedback
stabilization. In Brockett, R. W., Millman, R. S., and
Sussmann, H. J., editors, Differential Geometric Con-
-15 -12 -9 -6 -3 0 3 6 9 12 15
x (m)
-9
-6
-3
0
3
6
9
y (m)
t ∈ [0 s,15 s]
-15 -12 -9 -6 -3 0 3 6 9 12 15
x (m)
-9
-6
-3
0
3
6
9
y (m)
t ∈ [15 s,35 s]
-15 -12 -9 -6 -3 0 3 6 9 12 15
x (m)
-9
-6
-3
0
3
6
9
y (m)
t ∈ [35 s,60 s]
Figure 3: Sequential motion of the multi-vehicle system un-
der the proposed approach, where the minimum safe dis-
tance is a function of their relative position and orientations.
The plots illustrate the motion of the vehicles from t = 0 s to
t = 60 s. Positions and orientations are superimposed every
0.5 s.
trol Theory, pages 181–191. Birkhauser, Boston.
Er, M. J., Ma, C., et al. (2023). Intelligent motion control of
unmanned surface vehicles: A critical review. Ocean
Engineering, 280:114562.
Fossen, T. I. (2021). Handbook of marine craft hydrody-
namics and motion control. John Wiley & Sons, 2nd
edition.
Khalil, H. K. (2002). Nonlinear Systems. Prentice Hall,
New Jersey.
Leitmann, G. and Skowronski, J. (1977). Avoidance con-
trol. J. Optim. Theory Appl., 23(4):581–591.
Li, L., Wu, D., et al. (2021). A path planning strategy uni-
fied with a colregs collision avoidance function based
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
58

on deep reinforcement learning and artificial potential
field. Applied Ocean Research, 113:102759.
Li, Y., Hou, P., et al. (2025). Research on collision avoid-
ance methods for unmanned surface vehicles based on
boundary potential field. Journal of Marine Science
and Engineering, 13(1):88.
Lyu, H., Hao, Z., et al. (2023). Ship autonomous collision-
avoidance strategies—a comprehensive review. Jour-
nal of Marine Science and Engineering, 11(4):830.
Paliotta, C., Lefeber, E., et al. (2018). Trajectory track-
ing and path following for underactuated marine vehi-
cles. IEEE Transactions on Control Systems Technol-
ogy, 27(4):1423–1437.
Pettersen, K. Y. and Egeland, O. (1996). Exponential sta-
bilization of an underactuated surface vessel. In IEEE
Conference on Decision and Control, volume 1, pages
967–972.
Reyhanoglu, M. (1996). Control and stabilization of an un-
deractuated surface vessel. In IEEE Conference on
Decision and Control, volume 3, pages 2371–2376.
Rodr
´
ıguez-Seda, E. J. (2024a). A decentralized guaran-
teed collision avoidance control framework for multi-
vehicle systems in highly constrained spaces. In Proc.
International Conference on Informatics in Control,
Automation and Robotics, volume 1, pages 229–236.
Rodr
´
ıguez-Seda, E. J. (2024b). Reactive collision avoid-
ance control for nonholonomic vehicles and obstacles
of arbitrary shape. ASME. Letters Dyn. Sys. Control,
4(3):031005.
Rodr
´
ıguez-Seda, E. J., Tang, C., et al. (2014). Trajec-
tory tracking with collision avoidance for nonholo-
nomic vehicles with acceleration constraints and lim-
ited sensing. Int. J. Robot. Res., 33(12):1569–1592.
Stipanovi
´
c, D. M., Hokayem, P. F., et al. (2007). Coopera-
tive avoidance control for multiagent systems. J. Dyn.
Syst. Meas. Control, 129:699–707.
Vagale, A., Oucheikh, R., et al. (2021). Path planning and
collision avoidance for autonomous surface vehicles I:
A review. Journal of Marine Science and Technology,
pages 1–15.
Xue, Y., Lee, B., and Han, D. (2009). Automatic collision
avoidance of ships. Proc. of the Institution of Mechan-
ical Engineers, Part M: Journal of Engineering for the
Maritime Environment, 223(1):33–46.
Zhang, G., Han, J., et al. (2022). Apf-based intelligent navi-
gation approach for usv in presence of mixed potential
directions: Guidance and control design. Ocean En-
gineering, 260:111972.
Towards Guaranteed Collision Avoidance for Multiple Autonomous Underactuated Unmanned Surface Vehicles in Restricted Waters
59
