
Integrating Graph Search, Sampling, and Neural Networks for
Optimized Vehicle Path Planning
Xinze Li
a
Donald Bren School of Information and Computer Sciences, University of California, Irvine, California, 92697, U.S.A.
Keywords: Optimized Vehicle Path Planning, Graph Search, Sampling, Neural Networks.
Abstract: With the development of autonomous driving technology, path planning has become one of the core issues,
aiming to ensure the safety and efficiency of vehicles in complex and dynamic environments. However,
traditional path planning methods, especially graph-based algorithms, have limitations when facing changing
traffic and environmental factors. Therefore, it is particularly important to find more efficient and adaptive
path-planning strategies. In recent years, deep reinforcement learning (DRL) has provided new solutions for
path planning and promoted the advancement of related technologies. The theme of this paper is to review
the research progress of path planning for autonomous driving vehicles, focusing on the evolution from
traditional graph algorithms to modern deep learning methods. This paper will review from the following
perspectives: first, discuss traditional path planning methods and their limitations; second, analyze the
application and advantages of deep reinforcement learning in path planning; finally, explore the latest research
progress of combining deep learning with traditional path planning methods. In addition, this paper will
summarize the shortcomings of current research and look forward to the direction of future development.
1 INTRODUCTION
1.1 Traditional Path-Planning Methods
Path planning is an essential element of autonomous
vehicle navigation, designed to provide safe,
efficient, and optimal transit between destinations.
The primary challenge lies in developing algorithms
that can effectively navigate diverse and
unpredictable road conditions, while also maintaining
a balance between computational efficiency and real-
time adaptability. Traditional methods, such as graph-
based approaches, have long been employed for
navigation and routing, with Dijkstra’s algorithm
being a cornerstone for shortest-path determination.
While these classical methods offer structured
solutions, they often fall short when applied to real-
world scenarios, particularly in dynamic
environments where conditions can change
unpredictably.
a
https://orcid.org/0009-0008-4129-4056
1.2 Static vs. Dynamic Path Planning
A key distinction in autonomous vehicle path
planning lies in static versus dynamic environments.
Static path planning assumes that environmental
factors remain unchanged, enabling the
precomputation of optimal paths. However, real-
world driving requires dynamic path planning, which
adapts to moving obstacles, fluctuating traffic
patterns, and environmental changes. Insights from
Planning and Learning: Path-Planning for
Autonomous Vehicles emphasize the importance of
real-time adaptability in robust path-planning
algorithms, highlighting the need for predictive
modeling and sensor-based decision-making
(Osanlou, Guettier, Cazenave, & Jacopin, 2022).
1.3 Machine Learning and Deep
Reinforcement Learning
Recent breakthroughs in machine learning, especially
deep reinforcement learning (DRL), have provided
transformative solutions for path planning. In contrast
52
Li, X.
Integrating Graph Search, Sampling, and Neural Networks for Optimized Vehicle Path Planning.
DOI: 10.5220/0013678000004670
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Data Science and Engineering (ICDSE 2025), pages 52-59
ISBN: 978-989-758-765-8
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
to conventional systems reliant on precomputed
routes and reactive modifications, DRL empowers
vehicles to formulate adaptive navigation strategies
via environmental interaction. Deep Reinforcement
Learning in Autonomous Car Path Planning and
Control: A Survey explores how neural networks
process large volumes of sensor data, enhancing
decision-making in highly dynamic traffic conditions
and allowing autonomous systems to learn efficient
driving behaviors from experience (Chen, Ji, Cai,
Yan, & Su, 2024).
1.4 Integration of Deep Learning and
Classical Path-Planning Methods
As the field progresses, the integration of deep
learning with classical path-planning methods has
gained traction. Survey of Deep Reinforcement
Learning for Motion Planning of Autonomous
Vehicles highlights how machine learning
techniques, particularly neural networks and
reinforcement learning, are being applied to enhance
real-time decision-making and obstacle avoidance in
autonomous navigation (Zhang, Hu, Chai, Zhao, &
Yu, 2020). This shift underscores the increasing
reliance on data-driven models to improve
computational efficiency and adaptability in
unpredictable driving environments.
1.5 Paper Structure and Objectives
This paper presents a comprehensive review of path-
planning strategies for autonomous vehicles, tracing
the evolution from classical graph-based methods to
machine learning-driven approaches. The discussion
is structured as follows: Section 2 covers traditional
graph-based and heuristic algorithms, Section 3
explores optimization techniques for constrained
environments, and Section 4 delves into the latest
advancements in deep reinforcement learning-based
path planning. Section 5 provides further insights into
current limitations and future development directions.
By synthesizing insights from diverse research
studies, this review aims to highlight the current state
of autonomous vehicle path planning and outline
future directions in the field.
2 GRAPH SEARCH-BASED PATH
PLANNING
Path planning is a fundamental application of graph
search algorithms. They work best in static, fully
predictable environments. This section covers two
major ones: Dijkstra's algorithm and A*. It accounts
for their foundations, advantages, and the obstacles
they face in changing environments.
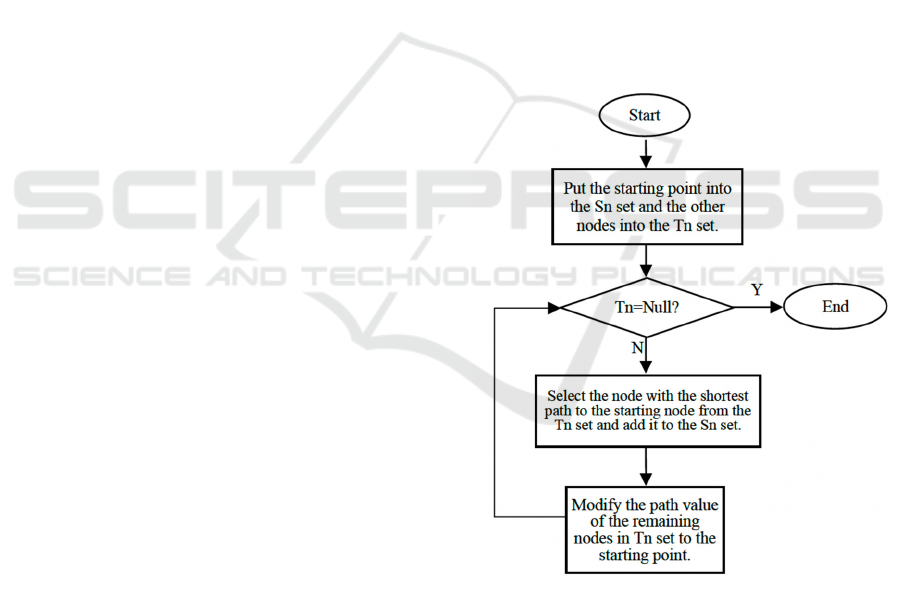
2.1 Classical Graph Search Algorithms
The earliest and most famous method for determining
the shortest path is Dijkstra's algorithm. It carefully
examines all potential routes from the source node to
the destination node. This algorithm assigns a
provisional distance value to each node: zero for the
source node and infinity for all others. It subsequently
iteratively selects the node with the minimal distance,
updates the distance values for its adjacent nodes, and
continues this procedure until it identifies the shortest
path. This process is clearly demonstrated in the
flowchart of Dijkstra's algorithm in Figure 1
(Osanlou, Guettier, Bursuc, Cazenave, & Jacopin,
2022) to visualize the node iterative evaluation and
update process.
Figure 1: Dijkstra Algorithm Flow Chart (Osanlou et al,
2022).
Integrating Graph Search, Sampling, and Neural Networks for Optimized Vehicle Path Planning
53
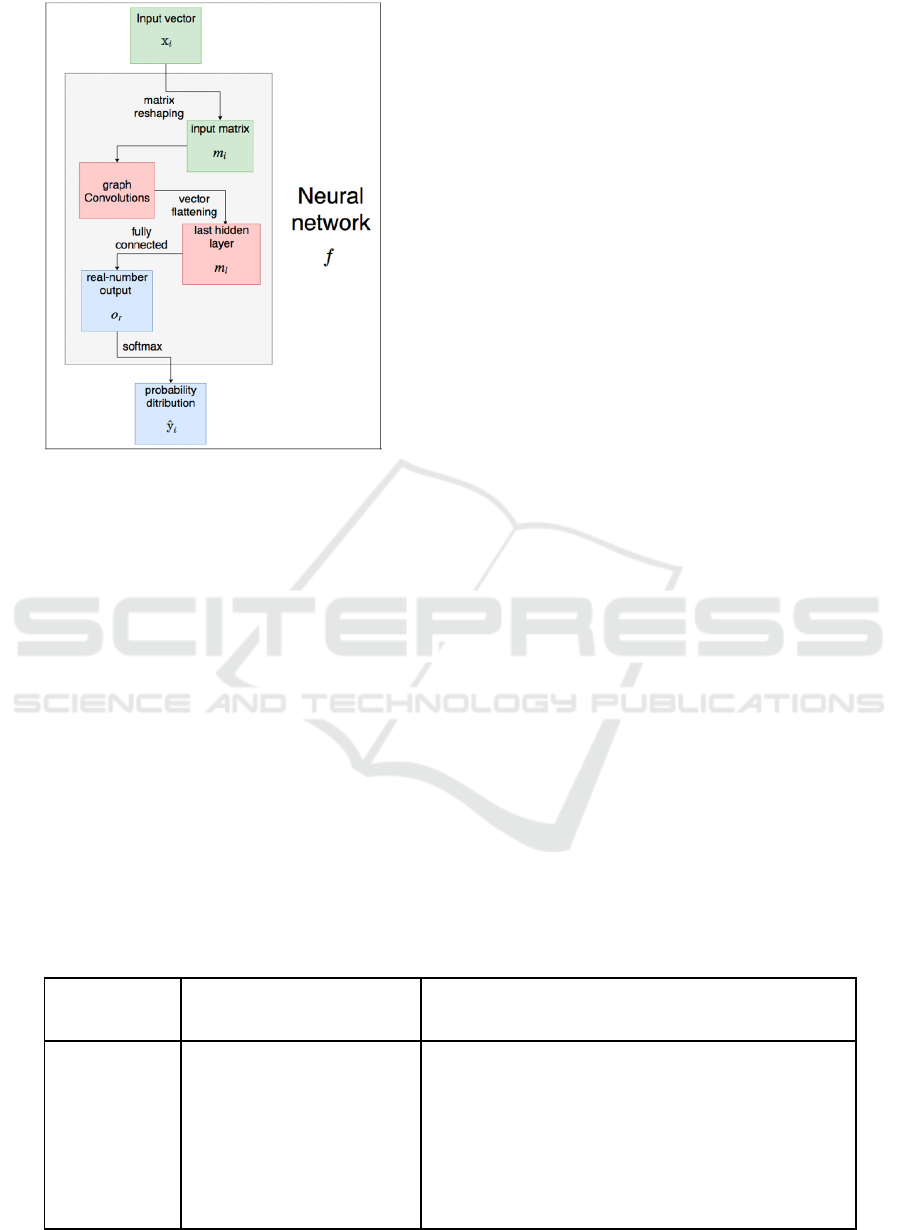
Figure 2: A Hybrid Example of Graph Search and Neural
Networks (Osanlou et al, 2021).
Dijkstra's algorithm guarantees the optimal result
when the search space is static and fully known, but
it suffers from computational cost. It considers every
alternative path, no matter how unpromising. Recent
developments have been aimed at addressing this
inefficiency. For instance, the neural network
structure Figure 2 (Osanlou et al, 2021) shows a
hybrid approach of graph search and neural networks.
This method employs machine learning to determine
the most likely successful paths, streamlining the
search process and conserving computational
resources while delivering consistently high-quality
results.
2.2 Advantages of A*
A* is an optimized version of Dijkstra's algorithm
that makes use of heuristics. It uses a heuristic
function, h(x), to predict the cost left to reach the
destination from a specific node. This makes A*
focus on paths preparing beforehand to reach the
destination and reduce exploration to areas that are
less expedient. This balance between exhaustive
search and heuristic guidance often makes A* faster
than Dijkstra's algorithm.
Table 1 (Table 1 from (Osanlou et al, 2022))
compares the performance of A* and Dijkstra's
algorithm in several scenarios. It indicates that A* is
the most efficient in terms of computation, especially
when the environment has clearly defined goal states.
As a result, A* is very well-suited for use cases where
speed and accuracy are both important
considerations, like robotics and video game
pathfinding. Its speed in finding near-optimal
solutions has made it a standard for these fields.
2.3 Challenges in Dynamic Settings
While A* is optimal for static scenarios, it is not
suitable for dynamic or partially known worlds.
When new elements are introduced in the
environment (for example, new obstacles or paths
become inaccessible), A* has to find a new entire
path from scratch. This issue dramatically raises
computational costs, as observed in assessments from
(Osanlou, Bursuc, Guettier, Cazenave, & Jacopin,
2021). This recalculation process is not fast enough
for real-time handling, especially in highly dynamic
environments such as autonomous driving.
Moreover, it has led to hybrid approaches and
machine learning techniques that allow the algorithm
to adapt more quickly to fluctuations in their
environment. The goal of these methods is to retain
the inherent benefits of A* but to minimize its
dependency on static assumptions.
Table 1. The Applicable Environment and Conditions of the Algorithm (Osanlou, Guettier, Bursuc, Cazenave, & Jacopin,
2022)
Classifi-
cation
Algorithm Name Applicable Environment And Conditions
Path planning
algorithm based
on search
Dijkstra
algorithm
(1) Applicable to higher abstract graph theory levels and
directed graphs, but cannot account for the presence of
negative edge directed graphs.
(2) Address the issue of traversal path planning.
(3) Solve the problem of determining the shortest path
and compare it to the length of the path without a
specific path.
(4) Utilize in global path planning.
ICDSE 2025 - The International Conference on Data Science and Engineering
54
A*
algorithm
(1) Appropriate for intricate yet moderately sized
directed graphs.
(2) Addresses the challenge of determining the shortest
route.
(3) Utilized for both global and local path planning.
(4) This approach is relevant when a specific path needs
to be determined.
Path planning
algorithm based
on sampling
Rapidly-
exploring
Random Trees
(RRT)
al
g
orithm
(1) Suitable for two-dimensional and high-dimensional
spaces.
(2) Effectively solves path planning problems in
complicated and dynamic environments.
(
3
)
Utilized for both
g
lobal and local
p
ath
p
lannin
g
.
Probabilistic Roadmap
Method
(PRM)
algorithm
(1) Appropriate for high-dimensional spaces.
(2) Addresses path planning challenges in complex and
dynamic environments.
(3) Utilized for both global and local path planning.
(4) Completion of the entire process necessitates the use
of a search-
b
ased algorithm.
3 SAMPLING-BASED PATH
PLANNING
For complex, high-dimensional space navigation,
sampling-based path planning algorithms are
necessary. When deterministic approaches are
computationally impossible, they shine. This section
delves into Rapidly-exploring Random Trees (RRT),
Probabilistic Roadmap Method (PRM), and Gaussian
Process-based Sampling, showcasing their
capabilities and capacity to adapt to real-time
settings.
3.1 Introduction to Sampling-Based
Algorithms
Algorithms like RRT and PRM that rely on sampling
try to discover workable routes in complicated
settings without necessitating a full-space model. In
order to find a workable route, these algorithms take
a random sample from the configuration space and
join them. Because of their probabilistic nature, they
are adept at navigating complex, multi-dimensional
spaces.
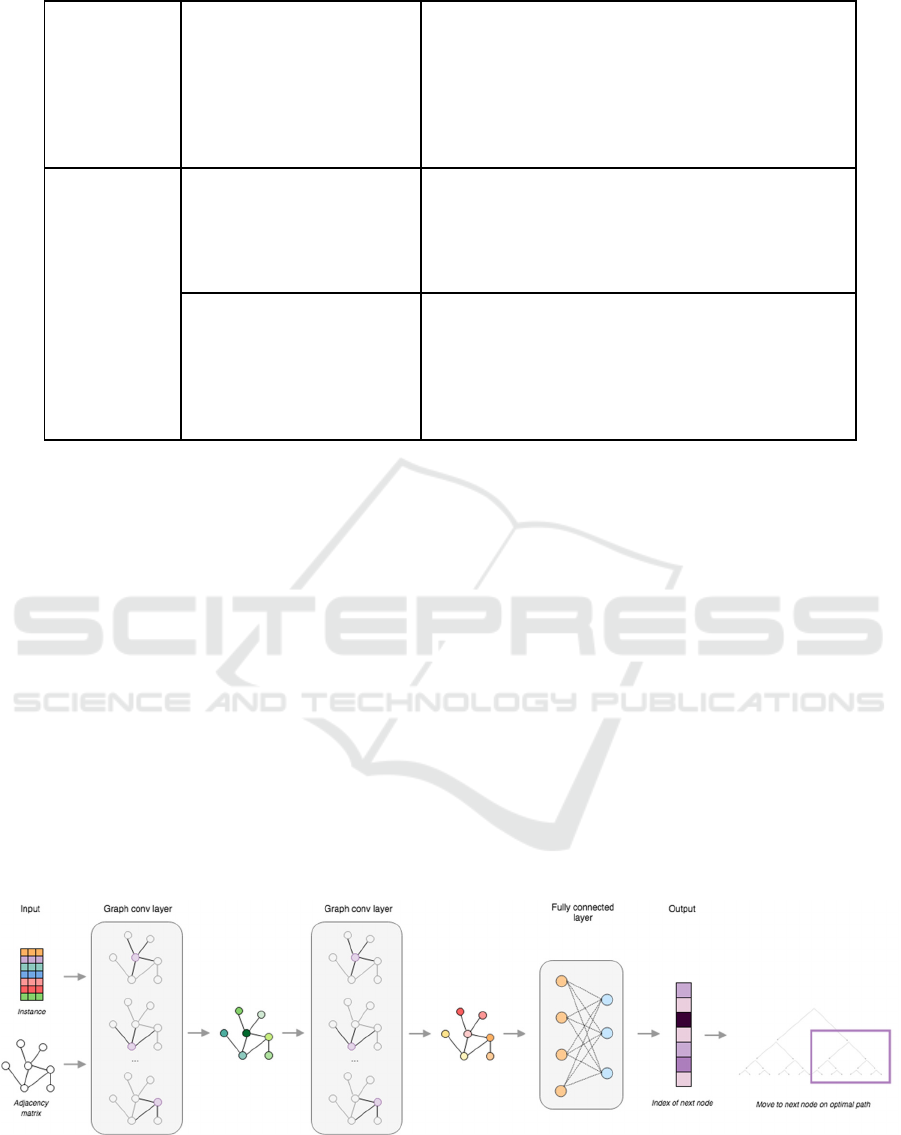
Figure 3 (Osanlou et al, 2021) shows the
Processing pipeline for Graph Convolutional
Networks (GCNs), which shows how graph models
can be integrated with algorithms based on sampling.
It shows how GCNs improve computing efficiency,
optimize the search process, and use learned features
to improve sample selection. By combining them
with new learning-based techniques, conventional
sampling methods are strengthened to withstand
changing environments.
Figure 3: Processing pipeline for path planning using GCNs. The GCN accepts an adjacency matrix containing costs and an
instance as input. Graph convolutional layers evaluate each node in conjunction with its adjacent nodes. New features are
generated for each node in the hidden layers. In the concluding layer, these features are input into a fully linked layer,
succeeded by a softmax function. The softmax layer identifies the subsequent node in the optimal trajectory (Osanlou et al,
2021).
Integrating Graph Search, Sampling, and Neural Networks for Optimized Vehicle Path Planning
55
3.2 Reinforcement Learning
Enhancements
When applied to dynamic settings, reinforcement
learning greatly enhances the adaptability of
sampling-based approaches. Algorithms like RRT
and PRM, which incorporate DRL (Deep
Reinforcement Learning), can optimize their
sampling tactics over time. An application of this is
demonstrated in Deep Reinforcement Learning-
Based Optimization for path planning, wherein the
model adjusts its sampling distribution in real-time
based on environmental input (Jin et al., 2023).
With reinforcement learning, path quality may be
preserved while the number of samples needed is
decreased. Because of this, RRT and similar
technologies are better suited to real-time
applications that require computational efficiency
and flexibility.
4 COMBINATION OF GRAPH
SEARCH AND SAMPLING-
BASED METHODS
The integration of deterministic and probabilistic
approaches represents a significant advancement in
vehicle path planning. By combining the structured
reliability of graph search with the adaptability of
sampling-based methods, hybrid models address
limitations present in either approach individually.
This section explores the architecture, case studies,
real-world applications, and the role of artificial
potential fields in enhancing hybrid systems.
4.1 Introduction to Hybrid Approaches
Hybrid models leverage the strengths of both
deterministic and probabilistic methods. They utilize
graph-based algorithms for precision while
incorporating sampling techniques for flexibility in
dynamic environments. The processing pipeline for
path planning using GCNs Figure 3 (Osanlou et al,
2021) demonstrates how hybrid systems integrate
GCNs with sampling. This pipeline highlights how
GCNs enhance the decision-making process by
predicting promising regions in the search space,
enabling faster and more efficient hybrid path
planning.
4.2 Case Studies and Examples
4.2.1 Performance Improvements in
Dynamic Environments
The hybrid approach’s ability to adapt to dynamic
conditions is evident in the Optimal Solving of
Constrained Path-Planning Problems with Graph
Convolutional Networks and Optimized Tree Search
(Osanlou et al, 2021). Evaluation charts from this
study show significant performance improvements,
particularly in environments with shifting obstacles
or constraints. These results underscore the hybrid
model’s advantage in combining structured
exploration with real-time adaptability.
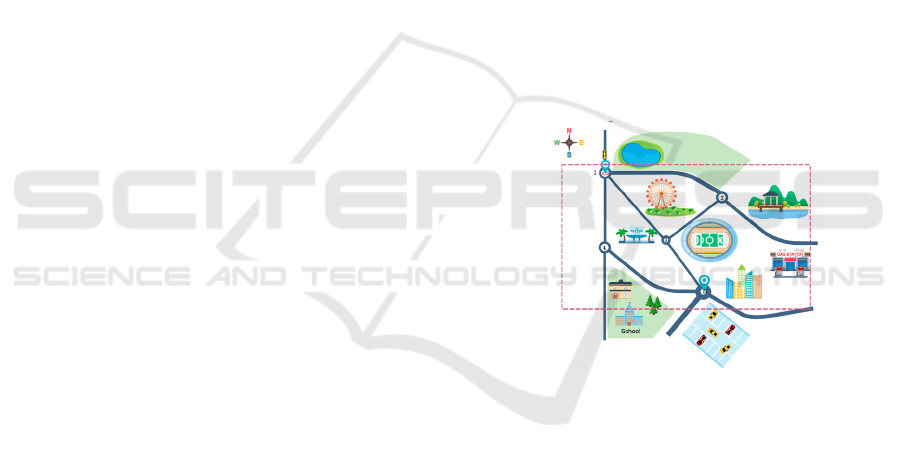
4.2.2 Handling Traffic Dynamics
Figure 4 (Chen, Jiang, Lv, & Li, 2020) illustrates a
road condition selection area that demonstrates how
hybrid methods manage dynamic traffic scenarios. By
integrating reinforcement learning with sampling-
based techniques, the model adapts to real-time traffic
changes, ensuring smooth and efficient navigation.
Figure 4: Road Condition Selection Area (Chen et al, 2020).
4.3 Real-World Applications
4.3.1 Optimization During Training
Improved Deep Reinforcement Learning Algorithm
for Path Planning provides insights into hybrid
methods during the training phase (Osanlou et al,
2021). Figure 5 and Figure 6 (Jin, Jin, & Kim, 2023)
present preliminary pathfinding results, showcasing
how the integration of deterministic and probabilistic
techniques optimizes decision-making even at early
training stages (Jin, Jin, & Kim, 2023). This
capability makes hybrid approaches well-suited for
environments where learning must occur on-the-fly.
ICDSE 2025 - The International Conference on Data Science and Engineering
56

Figure 5: Depiction of the Simulated Environment (Jin et
al., 2023).
Figure 6: Preliminary Path Finding (Jin et al., 2023).
4.3.2 Fine-Tuning Hybrid Models
Figure 7 (Chen et al., 2020) highlights how hybrid
methods can be fine-tuned by adjusting parameters to
balance exploration and exploitation. This real-world
application demonstrates the practical effectiveness
of hybrid systems in diverse scenarios, such as
autonomous vehicle navigation through
unpredictable environments.
Figure 7: The Influence of the Probability of Greedy
Algorithm (ε) on Path Selection (Chen et al., 2020).
4.4 Artificial Potential Fields in Hybrid
Models
Artificial Potential Fields (APF) contribute to hybrid
systems by providing local navigation efficiency.
Reference (Rehman, Tanveer, Ashraf, & Khan, 2023)
explains how APF principles, such as attractive and
repulsive forces, can be integrated into hybrid
methods to improve obstacle avoidance and goal-
seeking behaviors. These contributions enhance the
precision of hybrid models without compromising
their adaptability.
4.5 Addressing Hybrid System
Limitations
APF systems also address specific limitations in
hybrid models. Discussions in (Rehman et al., 2023)
highlight how APF techniques can handle edge cases,
such as narrow corridors or complex obstacle layouts,
where traditional methods may fail. By bridging these
gaps, APF ensures smoother navigation in real-world
applications.
5 FUTURE DIRECTIONS
Advancements in deep learning and path planning
have paved the way for further research in
autonomous vehicle navigation. Future studies should
focus on enhancing real-time decision-making,
optimizing energy efficiency, integrating multi-
criteria constraints, and addressing scalability
challenges.
5.1 Reinforcement Learning
Integration for Real-Time Decision-
Making
The integration of DRL into autonomous vehicle path
planning can significantly improve adaptability and
decision-making in dynamic environments. By
utilizing DRL, vehicles can learn from past
experiences to optimize routes, avoid obstacles, and
respond to real-time traffic conditions. Figure 8 (Jin
et al., 2023) illustrates the reward trend over
iterations, demonstrating how DRL models refine
their decision-making processes through iterative
learning. This trend highlights how reinforcement
learning enhances model adaptability and robustness
in varied driving scenarios.
Integrating Graph Search, Sampling, and Neural Networks for Optimized Vehicle Path Planning
57
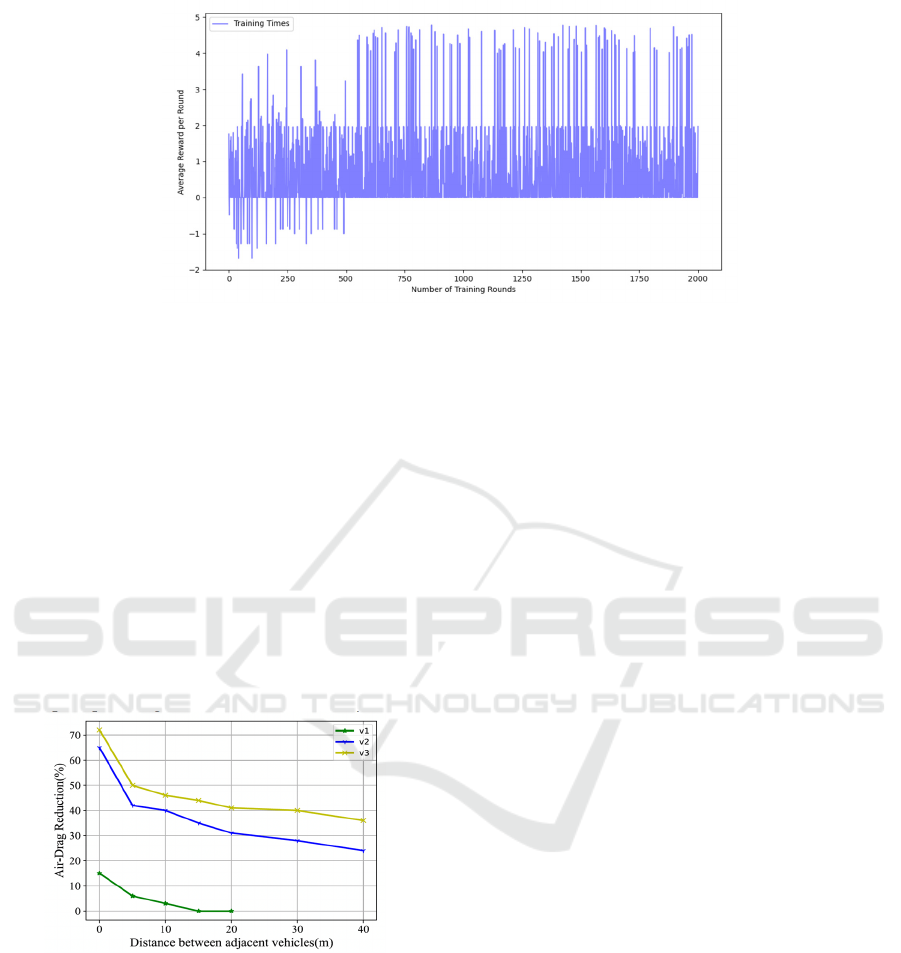
Figure 8: DRL-PP algorithm’s reward trend over 2,000 iterations (Jin et al., 2023).
5.2 Environmental Factors: Fuel
Efficiency and Energy
Optimization
Energy consumption and fuel efficiency are critical
considerations for autonomous vehicle path planning.
Factors such as air resistance, terrain variations, and
acceleration control significantly impact fuel
economy. Figure 9 (Chen et al., 2020) showcases the
relationship between vehicle distances and air
resistance, indicating that efficient path planning can
minimize fuel consumption and environmental
impact. Future research should focus on integrating
energy optimization strategies with deep learning-
based path planning to enhance sustainability.
Figure 9: The Relationship between Vehicles Distance and
Air Resistance (Chen et al., 2020).
5.3 Multi-Criteria Optimization for
Real-World Constraints
Real-world autonomous navigation requires
balancing multiple constraints, such as safety, traffic
efficiency, and user preferences. Learning-Based
Preference Prediction for Constrained Multi-Criteria
Path-Planning proposes a preference-based approach
to optimize path planning under diverse constraints
(Osanlou, Guettier, Bursuc, Cazenave, & Jacopin,
2021). By integrating multi-criteria optimization with
deep learning, future research can develop more
robust navigation systems that dynamically adjust to
real-world conditions while aligning with user-
defined priorities.
5.4 Challenges in Scalability and Real-
Time Performance
Despite advancements in DRL, scalability and real-
time performance remain major challenges in
autonomous vehicle path planning. DRL Based
Optimization for Autonomous Driving Vehicle Path
Planning highlights computational bottlenecks and
efficiency issues when scaling DRL models to larger
and more complex driving environments (Jin, Jin, &
Kim, 2023). Addressing these challenges requires
improved algorithms, hardware acceleration
techniques, and hybrid models that balance accuracy
and computational efficiency.
6 CONCLUSIONS
This article has examined various deep learning-
based approaches for path planning in autonomous
vehicles, highlighting key methodologies, challenges,
and future research directions.
A comparative analysis of different path-planning
methods, as summarized, reveals the strengths and
weaknesses of various approaches. While traditional
methods offer reliability and predictability, deep
learning-based techniques enhance adaptability and
learning capability. However, each method comes
with trade-offs in terms of computational complexity,
data requirements, and real-world applicability.
ICDSE 2025 - The International Conference on Data Science and Engineering
58

Hybrid models that combine classical path-
planning algorithms with machine learning
techniques hold significant promise for future
advancements. Optimization techniques play a
crucial role in refining model performance, as
evidenced by improvements in loss function curves
during training. Additionally, real-world applicability
highlights the importance of bridging theoretical
advancements with practical deployment to enhance
autonomous navigation systems.
Recent developments in the optimal resolution of
constrained path-planning issues emphasize the
application of GCNs and optimized tree search
techniques. These enhancements markedly diminish
computational burden and boost path-planning
efficacy, rendering real-time decision-making
possible.
While deep learning has revolutionized path
planning for autonomous vehicles, challenges such as
scalability, energy efficiency, and real-world
adaptability remain. Future research should focus on
refining hybrid models, integrating multi-criteria
optimization, and improving computational
efficiency to enable more robust and scalable
autonomous navigation systems.
REFERENCES
Chen, C., Jiang, J., Lv, N., & Li, S. (2020). An intelligent
path planning scheme of autonomous vehicles platoon
using deep reinforcement learning on network edge.
IEEE Transactions on Intelligent Transportation
Systems, 21(11), 4600–4611.
Chen, Y., Ji, C., Cai, Y., Yan, T., & Su, B. (2024). Deep
reinforcement learning in autonomous car path
planning and control: A survey. arXiv preprint
arXiv:2404.00340.
Jin, H., Jin, Z., & Kim, Y.-G. (2023). An improved deep
reinforcement learning algorithm for path planning in
unmanned driving. IEEE Access, 11, 7890–7902.
Jin, H., Jin, Z., & Kim, Y.-G. (2023). Deep reinforcement
learning-based (DRLB) optimization for autonomous
driving vehicle path planning. IEEE Access, 11,
12345–12356.
Osanlou, K., Bursuc, A., Guettier, C., Cazenave, T., &
Jacopin, E. (2021). Constrained shortest path search
with graph convolutional neural networks. arXiv
preprint arXiv:2108.00978.
Osanlou, K., Bursuc, A., Guettier, C., Cazenave, T., &
Jacopin, E. (2021). Learning-based preference
prediction for constrained multi-criteria path-
planning. arXiv preprint arXiv:2108.01080.
Osanlou, K., Guettier, C., Bursuc, A., Cazenave, T., &
Jacopin, E. (2021). Optimal solving of constrained
path-planning problems with graph convolutional
networks and optimized tree search. arXiv preprint
arXiv:2108.01036.
Osanlou, K., Guettier, C., Cazenave, T., & Jacopin, E.
(2022). Planning and learning: Path-planning for
autonomous vehicles, a review of the literature. arXiv
preprint arXiv:2207.13181.
Osanlou, K., Guettier, C., Bursuc, A., Cazenave, T., &
Jacopin, E. (2022). Review of path planning algorithms
for unmanned vehicles. IEEE Access, 10, 123456–
123470.
Rehman, A. U., Tanveer, A., Ashraf, M. T., & Khan, U.
(2023). Motion planning for autonomous ground
vehicles using artificial potential fields: A review.
arXiv preprint arXiv:2310.14339.
Zhang, G., Hu, X., Chai, J., Zhao, L., & Yu, T. (2020).
Survey of deep reinforcement learning for motion
planning of autonomous vehicles. IEEE Access, 8,
135946–135971.
Integrating Graph Search, Sampling, and Neural Networks for Optimized Vehicle Path Planning
59
