
Object Detection Based on Transfer Learning Techniques and
Transformer
Ke Xu
a
College of Computer, Mathematical and Natural Science, University of Maryland, College Park, U.S.A.
Keywords: Object Detection, Transformer, Transfer Learning, Set Prediction Loss.
Abstract: At present, researchers treat object detection as a hot topic especially using transformer. The goal is to
categorize individual objects and determine their location by means of a bounding box. Object detection is
the basis for many applications such as surveillance, image retrieval, automatic driving and face recognition.
This paper proposes a newly designed transformer model to cope with the object detection task based on
migration learning techniques. Specifically, the model consists of several parts: a Resnet-101 model as a
backbone, an encoder with an attention mechanism, a decoder with an object query input, and a network that
can fetch the output banding box. In addition, an ensemble prediction loss function for bipartite frame
matching is developed. With respect to the experiment results, the paper shows it is useful to implement
transfer learning technique between COCO 2007 and PASCAL VOC 2012 dataset. The Fsater Region
Convolutional Neural Network (R-CNN) model was used for the model comparison. This research
demonstrates the broad promise of using migration learning for object detection, enabling many downstream
tasks in this area. It also lays a solid foundation for future semantic segmentation tasks using other improved
converter models, which will have a real impact on applications in computer vision.
1 INTRODUCTION
A key task named object detection which contains
image identification and object locating plays a vital
roll in computer vision. This process encompasses not
only recognizing various objects but also determining
their boundaries or locations represented through
bounding boxes. The traditional approaches to object
detection have heavily relied on convolutional neural
networks (CNNs) due to their strong performance in
extracting hierarchical features from images.
However, the advent of transformer models, originally
developed for natural language processing tasks, has
introduced a paradigm shift in object detection
techniques (Vaswani, 2017). The adaptation of
transformer models to computer vision, and
specifically to object detection, leverages this ability
to process information globally across an image. In
contrast to CNNs, which extract features through local
receptive fields and build up representations through
successive convolutional layers, transformers can
theoretically attend to any part of the image directly,
regardless of spatial distance. This global view of the
a
https://orcid.org/0009-0003-6685-7197
image allows for more effective integration of
contextual information, which is crucial for accurately
identifying and localizing objects.
Transformer models utilize a technique called self-
attention function which is a special layer designed to
gather variety of features across the entirety of an
input sequence (Bahdanau, 2014). With the advent of
transformers, self-attention layers were introduced.
Every aspect of features are examined by these layers
which ordered by a sequence and after continuously
gathering the whole body of features within a
sequence, they then do self-updating in a manner akin
to Non-Local Neural Networks (Wang, 2018). One of
the first and most influential works to adapt
transformers for object detection is the Vision
Transformer by Dosovitskiy (Dosovitskiy, 2020). He
showed that image patches ordered like a sequences
could be plugged in to a plain transformer which
allows it to classify images successfully. Building on
this, Carion introduced the Detection Transformer
(DETR) model for object detection. DETR simplifies
the object detection pipeline by eliminating residue
parts, which are common in traditional object
detection systems (Carion, 2020). A primary benefit
Xu, K.
Object Detection Based on Transfer Learning Techniques and Transformer.
DOI: 10.5220/0013677900004670
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 2nd International Conference on Data Science and Engineering (ICDSE 2025), pages 47-51
ISBN: 978-989-758-765-8
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
47

of models that utilize attention mechanisms is their
capability for global computation and flawless
memory retention, rendering more adept at handling
lengthy sequences compared to Recurrent Neural
Networks (Graves, 2020). Consequently, different
types of RNNS are increasingly supplanted within
transformers.
Contemporary approaches to object detection
typically base their predictions on initial estimations.
Two-stage detectors generate box predictions in
relation to proposals, while single-stage methods
predict in reference to anchors or a predefined grid that
represents potential centers of objects (Cai, 2019).
Recent studies have shown that the ultimate
effectiveness of these systems is significantly
influenced by the precise manner in which these initial
estimates are configured (Zhang, 2020).
This research is mean to introduce Transformer-
based object detection through transfer learning.
Specifically, the authors added a transformer module
to the encoder and decoder by utilizing the DETR-
based attention mechanism and the structure of the
transformer model. Meanwhile, this paper proposes an
enhanced feedforward network module. The authors
first trained the model on COCO 2017dataset and then
froze the parameters in the encoder and decoder and
analyzed it on PASCAL VOCAL 2012 dataset to
implement migration learning (Lin, 2014)
(Everingham, 2020). The transformer model achieves
relatively high average precision (AP) on the
PASCAL VOCAL 2012 dataset. The prediction
performance of different models is also analyzed and
compared. The author compares model performance
with Fast-RCNN, and it is found that the transformer
achieves an average accuracy of 3.0 higher than that
of Fast-RCNN, which indicates that the transformer
performs well through the process of migration
learning. The experimental results show that using
Resnet-101 as the backbone and predicting losses
using the object detection set, the transformer model
achieves 42 APs on the COCO 2007 dataset, which is
3.0 higher than Fast-RCNN. This research may lay the
groundwork for the transformer to perform other
downstream tasks based on migration learning or pre-
trained models.
2 METHODOLOGIES
2.1 Dataset Description and
Preprocessing
This paper is conducted using the COCO 2017
datasets for detection which comprise 118,000
images for training and 5,000 for validation (Lin,
2014). The COCO 2017 dataset is a comprehensive
collection designed for tasks like object detection,
segmentation, and captioning, which are central to
advancing computer vision technologies. Originating
from the COCO project, this dataset is pivotal for
evaluating algorithm performance in detecting and
segmenting objects across a wide array of categories
in varied and complex images. Each image in these
datasets is equipped with annotations for bounding
boxes. According to the model that is trained before,
author analyzes the transfer learning performance on
Pascal VOC 2012 which contains a total of 11,530
image and are divided into a training/validation set of
around 5,717 images and a test set with the rest
(Everingham, 2020). It is an annual competition
designed to foster advancements in the recognition of
visual object classes in digital images. The sample is
shown in Figure 1.
Figure 1: The sample of the dataset. The left column is
COCO 2017 and the right column is PASCAL VOC 2012
(Photo/Picture credit: Original).
In the approach, author employs scale
augmentation by adjusting the size of the input
images so that their shortest side measures no less
than 480 pixels and no more than 800 pixels, while
ensuring the longest side does not exceed 1333 pixels.
Additionally, author incorporates random crop
augmentations during the training phase.
2.2 Proposed Approach
In this paper, author focuses on utilizing transformer
model to do object detection through transfer learning
technique. The main transformer model contains four
specific parts: backbone model, encoder, decoder and
feed-forward network (FFN). The backbone extracted
variety of features. Then as input for the transformer,
it decodes after adding positional embedding to
output object queries. The decoder processes the
object queries then transmits to FFN to acquire final
ICDSE 2025 - The International Conference on Data Science and Engineering
48
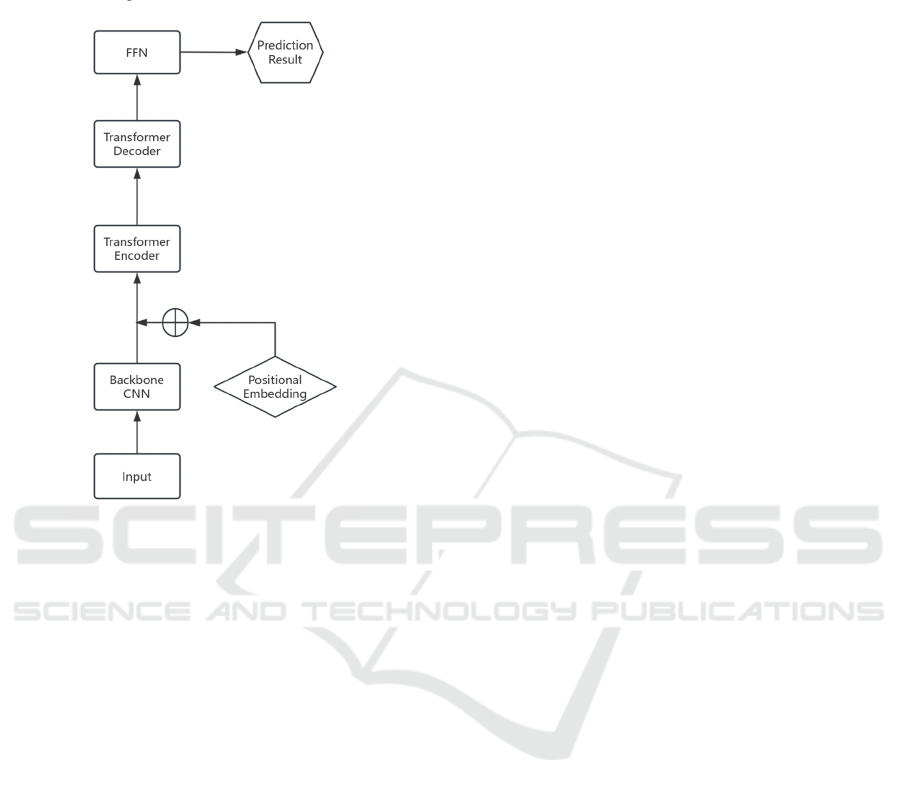
predication results. In addition, set prediction loss is
used to optimize the model to get the best prediction
results (Carion, 2020). The system architecture is
illustrated in Figure 2.
Figure 2: The pipeline of the model
(Photo/Picture credit:
Original).
2.2.1 Backbone
Beginning with an initial image x that belongs to
𝑅
(where the image has 3 color channels), a
standard CNN backbone produces an activation map
of lower resolution, denoted as f in 𝑅
.
Commonly, author selects C = 2048, with H and W
being one thirty-second of H0 and W0, respectively.
2.2.2 Transformer Encoder
Initially, the activation map f, with dimensions C, is
reduced to d lower dimension through a 1x1
convolution, generating a new feature map Z0 ∈
𝑅
. The encoder is designed to process
sequences, prompting the conversion of 𝑍
′
𝑠 spatial
dimensions into a single dimension, resulting in a
feature map of dimensions d×HW. In this paper,
author adds two more transformer blocks in order to
increase the output match precision between object
queries and the predicted bounding box. Given the
transformer architecture's invariance to permutations,
encodings with location which are fixed are
incorporated and for every attention layer they are
plugged into the input to maintain sequence order.
2.2.3 Transformer Decoder
With the standard design, the transformer decoder
processes large number of embeddings. Unlike the
model which decodes output sequences one element
at a time in an autoregressive manner, model
deciphers a number of objects simultaneously. Due to
the decoder's permutation invariance, it is essential
that the N input embeddings are distinct to yield
varied outcomes. For each attention layer’s input,
they are combined with learned location embeddings
which are called object queries, similar to the
encoder's approach. These large number of object
queries are transforms by the decoder into output
embeddings. Then through large number of
predictions of FFN, the bounding box and labels are
decoded from object queries. The model utilizes
encoder-decoder attention across large number of
features to understand the whole parts in relation to
one another through pairwise relationships, while
leveraging the entire image for context.
2.2.4 FFN
In order to generated the final predictions, the author
constructs a neural network with ReLU, a fully-
connected layer. This FFN estimates every single
element of each bounding box, while the class label
is determined by the linear layer. Given that the
number of stable sets of bounding boxes produce a
unique category, denoted as ∅, is introduced to signify
slots. It is similar to the "background" category.
2.2.5 Set Prediction Loss
The set prediction Loss is illustrated as follows
(Carion, 2020). Let y represent the set of actual
objects present in the image, and let 𝑦={𝑦
} denote
the set of N predictions made by the model. Given
that N typically exceeds the count of objects, y is
treated as a similarly sized set of N to indicate the
absence of an object. To establish a two sets
correspondence, author aims to identify a permutation
of a large number of features, σ, from the symmetric
group SN, that results in the minimum matching cost:
𝜎=𝑎𝑟𝑔𝑚𝑖𝑛
∑
𝐿
ℎ
(𝑦
,𝑦
()
)
(1)
In this context, 𝐿
(𝑦
,𝑦
()
) is denoted by the
cost of matching a ground truth instance 𝑦
with a
predicted instance identified by index 𝜎(𝑖).
Object Detection Based on Transfer Learning Techniques and Transformer
49
In the subsequent step, author calculates the loss
function, which refers to as the loss function (Stewart,
2016). Each ground truth element i is represented as
𝑦
=(𝑐
,𝑏
), where 𝑐
denotes the intended category
and 𝑏
is a four-dimensional vector. Every element of
the ground truth bounding box is denoted by this
vector which is similar to the overall dimensions. In
order to make predictions of index𝜎
()
, the class 𝑐
s
predicted probability is given by𝑝̂
()
(𝑐
), and the
associated predicted bounding box is denoted by 𝑏
()
.
This loss is conceptualized in a manner akin to those
found in typical object detectors: it is a weighted sum
of the negative log-likelihood for class prediction and
a box loss, which will be specified later on:
𝐿
(𝑦, 𝑦) =
∑
[− 𝑙𝑜𝑔 𝑝
()
(𝑐
)+
1
{
∅
}
𝐿
(𝑏
,𝑏
()
)]
(2)
where 𝜎
is the optimal assignment.
2.3 Implementation Details
This study used Python 3.9.10 and Pytorch deep
learning framework to conduct the experiment. For
the hyperparameters, the research is conducted with
the AdamW optimizer, configuring the initial
learning rate for the transformer at 1e-4, for the
backbone at 1e-5, and setting the weight decay to 1e-
4. Author initializes all transformer weights using
Xavier initialization and employ a ResNet model pre-
trained on ImageNet, sourced from torchvision, for
the backbone initialization. Additionally, the batch
normalization layers within the backbone are kept
frozen during training. This adjustment doubles the
resolution, enhancing the detection of small objects,
but it results in a sixteenfold increase in the
computational expense for the encoder's self-
attentions. Consequently, this leads to a twofold rise
in the overall computational cost.
3 RESULTS AND DISCUSSION
In this section, author conducts a various experiment
to illustrate that when training during transfer
learning from COCO2007 to PASCAL VOC 2012,
the transformer model achieves relatively high AP on
the target dataset. Moreover, author utilizes Faster R-
CNN as the comparison model and demonstrates that
the transformer outperforms Faster R-CNN on both
of these two datasets which proves the effectiveness
of this transfer learning process. Author also provides
detailed evaluation about the whole experiment.
3.1 Trained on COCO 2007
Scale augmentation is employed, adjusting the input
images so that their shortest side measures no less
than 480 and no more than 800 pixels, while ensuring
the longest side does not exceed 1333 pixels.
Additionally, to enhance the learning of the whole
picture of encoder attention mechanism, random crop
augmentations are applied during training, which has
been found to boost performance. A training image is
cropped to a random square, which is subsequently
resized to the range of 1333 pixels.
Table 1: Comparison with Faster R-CNN on COCO 2007
dataset.
Model
The number
of parameters
AP
Faster R-CNN 166M 39.0
Transformer 41M 42.0
Table 1 illustrates when training on COCO 2007
the transformer model outperforms Faster R-CNN by
3.0 AP. Since the author trains the model with Adam
and it takes a very long time for training to complete,
this means the training epoch is longer and it can fetch
more useful features. Faster R-CNN is trained
without sufficient data preprocessing technique.
Therefore, it makes sense that Faster R-CNN has
lower performance.
3.2 Trained on PASCAL VOC 2012
The PASCAL VOC 2012 is a widely recognized
benchmark in computer vision field. It is widely used
for evaluating the performance of models in object
detection, classification, and segmentation tasks. This
widespread use allows for easy comparison of
model's performance among well-develop models.
Given its moderate size and complexity, the dataset is
suitable for transfer learning, especially when
computational resources are limited or when one aims
to fine-tune pre-trained models quickly. It's an
excellent choice for demonstrating the efficacy of
transfer learning techniques. Therefore, the
experiment is conducted on this target datasents. The
mean AP is used to evaluate the model performance.
ICDSE 2025 - The International Conference on Data Science and Engineering
50
Table 2: Comparison with Faster R-CNN on PASCAL
VOC 2017 dataset.
Model
The number
of parameters
mAP
Faster R-CNN 166M 65.7
Transformer 41M 68.8
Table 2 illustrates that with less parameter, the
transformer model achieves higher mAP which
outperforms Faster R-CNN by 3.0. Also in the
meantime, the AP acquired on PASCAL VOC is
strictly higher than that of COCO 2007 which shows
the effectiveness for transfer learning.
4 CONCLUSIONS
This study proposes a new object detection based on
transformer modelling. In addition, this paper sets up
a bidirectional matching loss for prediction. The
model contains a Resnet-101 model as a backbone, an
encoder part with an attention mechanism, a decoder
with an object query input, and a feedforward
network. The loss function is a two-step set prediction
loss carefully designed for object detection. In
addition, migration learning techniques are invoked
to demonstrate the effectiveness of improving model
performance through two baseline object detection
datasets. The paper then conducts various
experiments to analyse the performance of the model
on these two datasets. The authors implement Faster
R-CNN model for comparison. On both datasets, the
transformer model outperforms the Faster R-CNN
and has a higher AP by 3.0. Meanwhile, the
transformer trained on the PASCLA VOC maintains
AP of 68.8, which is significantly higher than that of
COCO 2007. the effectiveness of transfer learning is
well demonstrated. This redesigned approach to the
detection system presents a number of challenges,
particularly in the areas of training, optimization, and
small-object performance. Previous detection models
have been improved over the years to address similar
problems. In the future, semantic segmentation tasks
for transformers will be considered as the next phase
of research.
REFERENCES
Vaswani, A., Shazeer, N., Parmar, N., et al. (2017).
Attention is all you need. Advances in neural
information processing systems, p. 30.
Bahdanau, D., Cho, K., Bengio, Y., (2014). Neural machine
translation by jointly learning to align and translate.
arXiv preprint:1409.0473.
Wang, X., Girshick, R., Gupta, A., et al. (2018). Non-local
neural networks. Proceedings of the IEEE conference
on computer vision and pattern recognition. pp: 7794-
7803.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., et al. (2020).
An image is worth 16x16 words: Transformers for
image recognition at scale. arXiv preprint
arXiv:2010.11929.
Carion, N., Massa, F., Synnaeve, G., et al. (2020). End-to-
end object detection with transformers. European
conference on computer vision. Cham: Springer
International Publishing, pp: 213-229.
Graves, A., Graves, A., (2012). Long short-term memory.
Supervised sequence labelling with recurrent neural
networks, pp: 37-45.
Cai, Z., Vasconcelos, N., (2019). Cascade R-CNN: High
quality object detection and instance segmentation.
IEEE transactions on pattern analysis and machine
intelligence, vol. 43(5). pp: 1483-1498.
Zhang, S., Chi, C., Yao, Y., et al. (2020). Bridging the gap
between anchor-based and anchor-free detection via
adaptive training sample selection. Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition. pp: 9759-9768.
Lin, T, Y., Maire, M., Belongie, S., et al. (2014). Microsoft
coco: Common objects in context. Computer Vision–
ECCV 2014: 13th European Conference, Zurich,
Switzerland, pp: 740-755.
Everingham, M., Van, Gool, L., Williams, C, K, I., et al.
(2010). The pascal visual object classes (voc) challenge.
International journal of computer vision, vol 88. pp:
303-338.
Stewart, R., Andriluka, M., and Ng, Y, A., (2016). End-to-
End People Detection in Crowded Scenes. IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR), Las Vegas, NV, USA, pp: 2325-
2333.
Object Detection Based on Transfer Learning Techniques and Transformer
51
