
Safety-Centric Monitoring of Structural Configurations in Outdoor
Warehouse Using an UAV
Assia Belbachir
1 a
, Antonio M. Ortiz
1 b
, Ahmed Nabil Belbachir
1 c
and Emanuele Ciccia
2
1
NORCE Research AS, Grimstad, Norway
2
ABS - Acciaierie Bertoli Safau S.p.A., Udine, Italy
Keywords:
Industrial Safety, Computer Vision, Warehouse Management, Geometric Reasoning, Steel Bar Manufacturing,
Segment Anything Model, UAV.
Abstract:
In industrial warehouse environments, particularly in steel bar manufacturing scenarios, ensuring the structural
stability of stacked bars is essential for both worker safety and operational efficiency. This paper presents a
novel vision-based framework for automatic safety validation of outdoor storage bays using a dual-resolution
implementation of the Segment Anything Model (SAM). The system processes video streams coming from
drone (AUV) by combining zero-shot segmentation with geometric reasoning to assess lateral and frontal
support conditions in real time. At each frame, SAM is applied at two scales to extract both fine-grained
support components and large bulk regions. A morphological proximity rule reclassifies unsupported regions
based on contact with multiple smaller support masks. Additionally, a frontal-view analysis computes bar-end
centroids and applies a triangle-based inclusion test to determine correct placement. Experimental results on
real warehouse videos demonstrate robust safety classification under occlusion and clutter, with interactive
frame rates and no need for manual annotation. The proposed framework offers a lightweight, interpretable
solution for automated safety monitoring in complex industrial environments.
1 INTRODUCTION
The rise of Industry 4.0 has led to the widespread
adoption of computer vision systems in manufactur-
ing and logistic workflows, allowing automation in ar-
eas such as defect inspection, dimensional metrology,
and human–machine interaction monitoring for im-
proved throughput and safety (Smith and Lee, 2019).
In parallel, logistics and warehousing operations in-
creasingly rely on vision systems for inventory track-
ing, object localization, and robot guidance (Patel and
Gupta, 2020). In industrial environments, such as
steel bar manufacturing facilities, improper stacking
or insufficient bracing of materials poses serious risks,
including potential collapses, equipment damage, and
workplace injuries.
Despite the severity of hazards, structural stabil-
ity assessments remain predominantly manual, mak-
ing them prone to human error, subjective interpre-
tation, delayed response, and inconsistent execution.
a
https://orcid.org/0000-0002-1294-8478
b
https://orcid.org/0000-0002-7145-8241
c
https://orcid.org/0000-0001-9233-3723
This highlights a critical need for automated, vision-
based solutions that can ensure reliable and timely
safety validation in such high-risk environments.
Existing computer vision mechanisms for indus-
trial safety monitoring often focus on detecting per-
sonnel, identifying personal protective equipment, or
spotting unsafe behaviors. Meanwhile, segmentation-
based solutions can localize and label individual ob-
jects with high accuracy, but often require task-
specific training data and struggle with generaliza-
tion in cluttered or outdoor scenes. Moreover, tradi-
tional reasoning techniques, while interpretable, lack
robustness to occlusion and visual variability, making
them insufficient when deployed in complex storage
environments. Instance-level models such as Mask
R-CNN achieve high accuracy in part segmentation,
but demand extensive annotated datasets and exhibit
brittleness under domain shifts (He et al., 2017).
The recent Segment Anything Model (SAM) over-
comes annotation bottlenecks by providing zero-shot,
promptable mask proposals across domains without
retraining (Kirillov et al., 2023), yet its single-scale
outputs may under-segment small bracing elements
or over-segment large bulk regions when deployed in
Belbachir, A., Ortiz, A. M., Belbachir, A. N. and Ciccia, E.
Safety-Centric Monitoring of Structural Configurations in Outdoor Warehouse Using an UAV.
DOI: 10.5220/0013675300003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 471-478
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
471

isolation.
Complementary to learning-based segmentation,
classical geometric reasoning techniques (e.g., Hough
and RANSAC) detect primitives such as lines, cir-
cles, and triangles for structural analysis in construc-
tion and logistics applications (Duda and Hart, 1972).
Handcrafted pipelines combining thresholding and
shape tests can identify support wedges or triangular
braces (Eiffert et al., 2021), but they lack robustness
to visual clutter, occlusion, and lighting variability
common in outdoor warehouses. More recent volu-
metric extensions using 3D radiance fields for support
estimation (Cen et al., 2023), but incur prohibitive
computational cost for real-time monitoring.
Multi-scale segmentation and proximity analysis
represent a promising middle ground. Deep networks
with feature pyramids capture both fine and coarse
structures (Wu and Zhang, 2019), while morpholog-
ical dilation and contact-based heuristics have been
applied to validate part assembly in robotics (Zhang
et al., 2022). To our knowledge, no existing approach
unifies zero-shot mask generation at multiple resolu-
tions with simple, interpretable geometric tests and
proximity reclassification to deliver real-time stabil-
ity checks of stacked materials in image streams.
In this work, we address these challenges with a
novel vision-based safety monitoring framework for
safety validation of outdoor steel-bar storage bays us-
ing top- and front-view images. Our contributions
are:
• Dual-Scale Zero-Shot Segmentation. Us-
ing the Segment Anything Model (SAM) with
lightweight geometric reasoning to assess struc-
tural support both from top and front-view im-
ages (points per side=32 and 64) to capture
both fine support components and large bulk re-
gions without any manual labeling (Kirillov et al.,
2023).
• Morphological Proximity Reclassification. We
introduce a lightweight dilation-based rule that re-
classifies large, initially “at-risk” regions as sup-
ported only when contacted by at least three
distinct fine-scale masks, ensuring interpretable,
topology-aware decisions (Duda and Hart, 1972).
• Triangle-Based Frontal Validation. We extract
bar-end centroids from front views and form a
minimal support triangle to verify correct bar
placement within safe boundaries, inspired by ge-
ometric support tests in logistics vision (Lee and
Kim, 2021).
• Real-World Warehouse Evaluation. We
demonstrate robustness and efficiency on outdoor
manufacturing video streams—achieving a good
frame rates and safety detection reliability com-
pared to other approaches.
The proposed approach is efficient, generalizable
across varying conditions, and suitable for real-time
deployment in industrial settings.
The remainder of this paper is organized as fol-
lows. Section 2 reviews related work in industrial
segmentation and safety monitoring. Section 3 for-
malizes our bay stability criteria. Section 4 details
the proposed dual-SAM segmentation and geometric
algorithms. Section 5 presents experimental results
and performance analysis, and finally, Section 6 con-
cludes with future directions.
2 RELATED WORK
Vision-based safety systems in manufacturing have
primarily focused on human and equipment moni-
toring—detecting PPE compliance, unsafe actions,
or machine faults (Smith and Lee, 2019) (Patel and
Gupta, 2020). These approaches often neglect mate-
rial stability issues, such as improperly braced stacked
steel bars, which pose serious safety risks.
Semantic segmentation methods like Mask
R-CNN (He et al., 2017) have shown high accuracy
in part-level detection but require large annotated
datasets and struggle with domain shifts. The Seg-
ment Anything Model (SAM) (Kirillov et al., 2023)
enables zero-shot mask generation, greatly reducing
annotation needs. However, its single-scale outputs
can under-segment small supports or over-segment
large objects in cluttered scenes.
Classical geometry-based techniques, including
Hough and RANSAC (Duda and Hart, 1972) (Lee and
Kim, 2021), have been used for detecting structural
primitives. Hybrid pipelines combining segmentation
and shape heuristics (Eiffert et al., 2021) or 3D volu-
metric reasoning (Cen et al., 2023) offer deeper struc-
tural insights, but often lack robustness or real-time
efficiency.
Multi-scale segmentation (Wu and Zhang, 2019)
and proximity analysis (Zhang et al., 2022) have been
used in robotics to verify physical support, but exist-
ing work does not integrate zero-shot multi-scale seg-
mentation with interpretable geometric reasoning for
real-time stability validation.
Gap and Our Contribution. We address this gap
by unifying dual-resolution SAM segmentation with
morphological proximity rules and triangle-based
geometric validation, enabling efficient and inter-
pretable safety checks for stacked materials in indus-
trial video streams.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
472
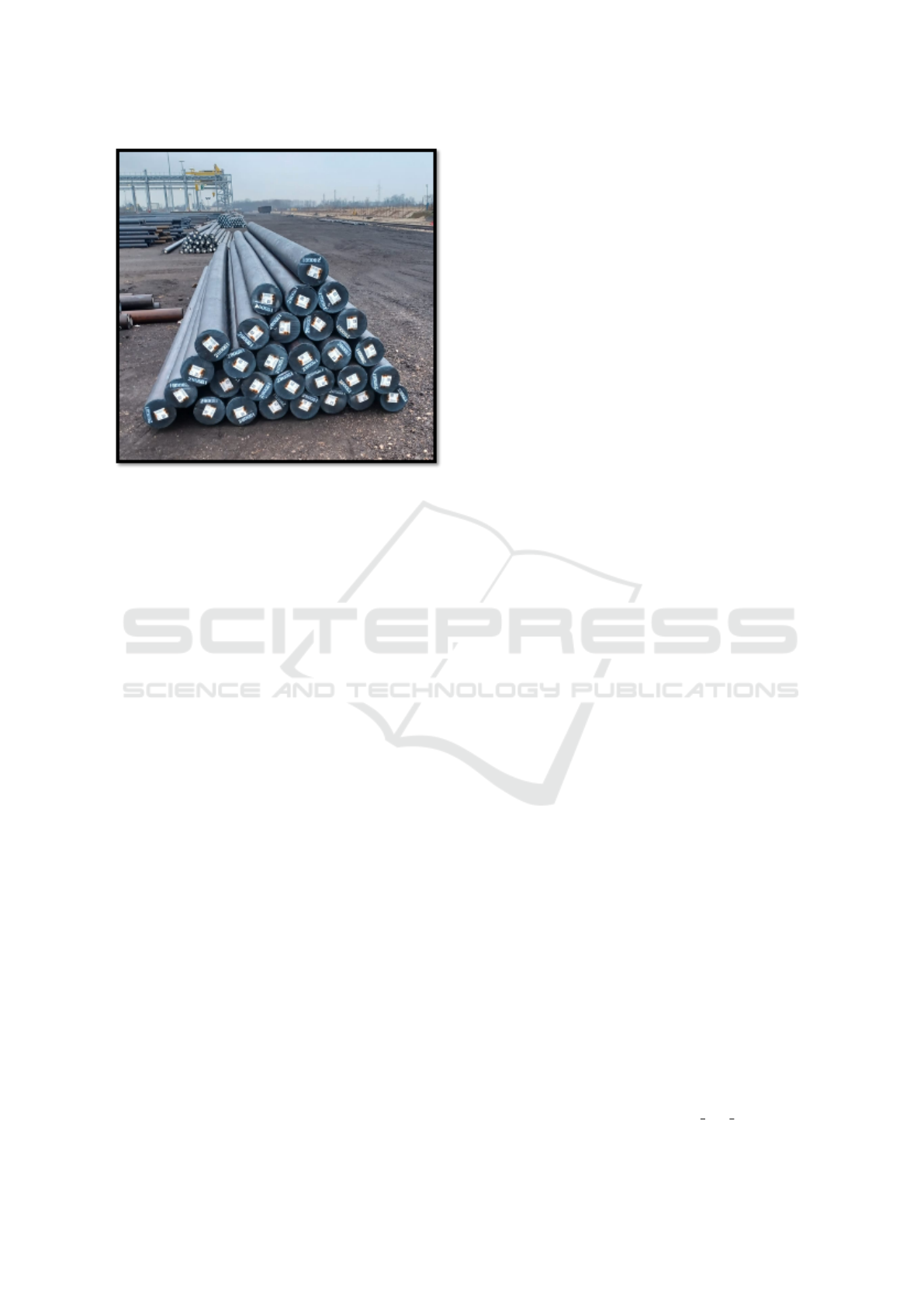
Figure 1: Illustration of one Bay/box of outdoor steel bars.
3 PROBLEM DEFINITION
In steel bar manufacturing, storage areas (referred to
as bays or boxes) are designated zones where steel
bars are stacked and temporarily held before fur-
ther processing or transportation. An example of a
bay/box is shown in Figure 1. The structural stability
of each bay is critical to ensure operational safety, as
improperly supported stacks can lead to hazardous sit-
uations, including material collapse and injury. A bay
is considered structurally safe when sufficient support
is presented on both lateral sides and at the front, thus
meeting the specific support criteria as follows:
• Left Support: At least two support structures are
detected on the left side of the bay.
• Right Support: At least two support structures
are detected on the right side of the bay.
• Front Support: The steel bars are positioned
within a predefined virtual triangular region at the
front of the bay. Bars located outside this region
are considered improperly placed and can pose
safety risks.
These support structures typically include physi-
cal components such as wedges or inclined bars that
secure heavy loads. The virtual triangular region at
the front serves as a spatial guide to define the cor-
rect placement of the steel bars, ensuring that they are
adequately supported and do not extend beyond safe
limits.
Formal To formalize this, we define the input as
a video stream where each frame is represented as
a color image I ∈ R
H×W×3
, where H and W denote
height and width, respectively. Within each frame,
we selected a set of n predefined bays (or boxes), each
denoted as B
i
⊂ I, where i = 1,2,.. .,n. Each bay B
i
must satisfy a set of specific structural safety condi-
tions to be considered as safe. We have defined three
support zones with respect to the spatial information
of each bay:
• L(B
i
): left support zone of bay B
i
• R (B
i
): right support zone of bay B
i
• F (B
i
): front support zone of bay B
i
Let T denote the set of all detected support struc-
tures in the image, i.e., T = T
j
⊂ I. The number of
support elements within each zone is then computed
as follows:
N
L
(B
i
) = |{T
j
∈ T | T
j
⊂ L(B
i
)}| (1)
N
R
(B
i
) = |{T
j
∈ T | T
j
⊂ R (B
i
)}| (2)
N
F
(B
i
) = |{T
j
∈ T | T
j
⊂ F (B
i
)}| (3)
The binary safety condition for each bay B
i
is de-
fined as:
S(B
i
) =
(
1, if N
L
(B
i
) ≥ 2 ∧ N
R
(B
i
) ≥ 2 ∧ N
F
(B
i
) ≥ 1
0, otherwise
(4)
A value of S(B
i
) = 1 indicates that the bay B
i
meets all safety requirements, while S(B
i
) = 0 flags it
as potentially unsafe due to insufficient support struc-
tures.
4 FRAMEWORK OF THE
PROPOSED APPROACH
This section provides an overview of our proposed
vision-based safety validation framework, which is
designed to assess the structural stability of material
stacks in outdoor warehouse environments. The sys-
tem leverages multi-resolution zero-shot segmenta-
tion and geometric reasoning to validate support con-
ditions from both top and front camera views.
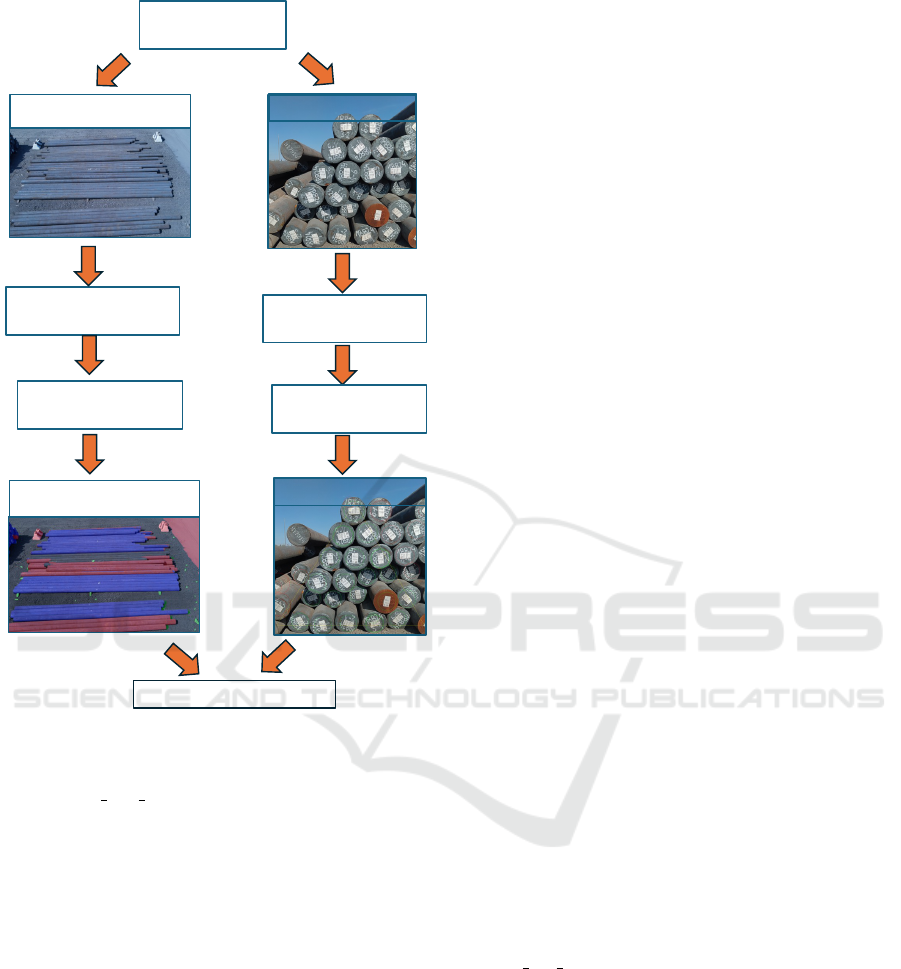
Figure 2 illustrates the overall architecture of our
method, which consists of the following core compo-
nents:
1. Dual-View Video Acquisition: The system cap-
tures synchronized video streams from two per-
spectives: a top-down view to assess lateral sup-
port conditions, and a frontal view to validate bar-
end positioning.
2. Multi-Resolution Segmentation with SAM:
Each frame is processed using the Segment Any-
thing Model (SAM) at two different resolu-
tions: a coarse scale (points per side = 32)
Safety-Centric Monitoring of Structural Configurations in Outdoor Warehouse Using an UAV
473
Top vie w fra me
Multi-Resolution SAM
(Coarse + Fine)
Morphological
support inference
Support Validity
Front view Frame
Bar-End Centroid
Estimation
Frontal geometric
Inclusion test
Positional Validity
Bay Safety Classification
Dual-View Video
Input
Figure 2: Illustration of the developed framework.
to segment large bulk materials, and a fine scale
(points per side = 64) to detect smaller struc-
tural supports such as wooden braces, metallic
beams, or narrow wedges.
3. Morphological Support Inference: In the top
view, we apply a proximity-based rule: large
masks are classified as supported if they are in
direct contact with at least three smaller support
masks. Contact is established using binary di-
lation and overlap checking, mimicking morpho-
logical reasoning rather than rigid geometry.
4. Frontal Geometric Validation: For frontal
frames, we compute centroids of bar ends and
apply a triangle-based inclusion test. The trian-
gle is defined using warehouse-specific reference
points, and each bar-end must fall within the trian-
gle to be considered properly positioned and safe.
5. Safety Classification and Visualization: The
system outputs a per-frame safety assessment,
flagging any detected violations such as unsup-
ported materials or improperly placed bars. Re-
sults are visualized in real time with overlaid
masks and support indicators for operator feed-
back.
This modular pipeline ensures interpretability,
scalability to new material types, and robust opera-
tion under cluttered or low-visibility conditions—all
without the need for manual annotation or retraining.
4.1 Multi-Resolution SAM for Dual
Views
To enable real-time safety validation of steel bar stor-
age bays, we propose a vision-based algorithm that
leverages Segment Anything Model (SAM) for au-
tomatic mask generation, combined with proximity-
based geometric reasoning. The approach operates
directly on individual video frames and is designed to
identify structural support elements without requiring
prior annotation or domain-specific retraining. The
algorithm incorporates two key components (i) top-
view support detection, which verifies lateral and rear
support structures, and front-view validation, which
assesses frontal bar placement using centroid-based
geometric constraints. Each component uses SAM’s
zero-shot segmentation capability at multiple reso-
lutions to extract both fine-grained and large-scale
structural features, enabling robust performance un-
der challenging visual conditions such as occlusion,
clutter, and lighting variability.
4.2 Top-View Support Detection
Algorithm
The top-view detection module processes each frame
extracted from the input video and convert them
from BGR to RGB format to meet the input require-
ments of the SAM framework. Two SAM-based au-
tomatic mask generators are used in parallel, each
configured with a different resolution (specifically,
points per side = 32 and 64). This dual-resolution
strategy enables the capture of multi-scale structural
features within the frame.
The masks produced by both generators are ag-
gregated and classified according to their pixel area.
Masks falling within a predefined small-area range
are interpreted as potential support points, while
larger masks are considered critical regions that may
require structural evaluation. Small-area masks are
rendered in green, indicating supportive features,
whereas large-area masks are initially colored red to
denote potential risks. To determine the structural
safety of the red regions, a proximity-based reclassi-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
474
Algorithm 1: Dual SAM-Based Support Detection.
Require: Input video V
Ensure: Output video
ˆ
V with colored safety masks
1: Load SAM model with checkpoints
2: Initialize two SAM mask generators with p = 32
and p = 64
3: for each frame F in video V do
4: Convert F from BGR to RGB
5: Generate masks: M
32
← SAM
32
(F), M
64
←
SAM
64
(F)
6: M ← M
32
∪ M
64
7: Separate masks into:
• Small masks S: a ∈ (0,5000)
• Large masks L: a ∈ [6000,1.2 × 10
6
]
8: Label small masks as green, large as red
9: for each red mask r ∈ L do
10: Dilate r to get dilated
r
11: Count green masks g ∈ S touching dilated
r
12: if count ≥ 3 then
13: Reclassify r as blue
14: end if
15: end for
16: Overlay green, red, and blue masks onto F
17: Blend mask overlay with original frame
18: Write processed frame to
ˆ
V
19: end for
20: Save
ˆ
V as output video
fication is performed. Each large red mask undergoes
morphological dilation, and the algorithm checks for
overlapping or nearby green regions. If a red region
is in contact with at least three distinct green masks, it
is reclassified as structurally supported and recolored
blue. This proximity threshold ensures that only well-
supported regions are marked safe. In the final step,
mask overlays are combined with the original video
frame using alpha blending to preserve visual con-
text. Each reclassified (blue) region may also be an-
notated with the number of touching green masks for
interpretability. The processed frames are then com-
piled into a new output video that visually communi-
cates safety-related insights throughout the footage.
This approach offers a semi-automated mechanism
for identifying and verifying structural support in
steel bar manufacturing environments, with potential
applications in quality assurance, anomaly detection,
and operator safety systems (see algorithm 1).
4.3 Front-View Safety Detection via
SAM and Triangle Geometry
To evaluate frontal safety in steel bar configurations,
we introduce a geometric reasoning algorithm that
Algorithm 2: Front safety detection via SAM and triangle
geometry.
1: Input: Image I from front view, SAM model M ,
thresholds (A
min
,A
max
,γ)
2: Output: Safety status (SAFE or UNSAFE) and an-
notated image
3: Convert I to RGB format
4: Generate mask set S ← M (I)
5: Initialize empty set of bar centers C ←
/
0
6: for each mask s ∈ S do
7: Compute area a
s
and contour c
s
8: if a
s
/∈ [A
min
,A
max
] then
9: continue
10: end if
11: Compute circularity κ
s
of c
s
12: if κ
s
< γ then
13: continue
14: end if
15: Compute centroid (x
s
,y
s
) and append to C
16: end for
17: if |C | < 3 then
18: return UNSAFE
19: end if
20: Compute triangle T from: bottom-left: min
x
,
bottom-right: max
x
, apex: (mean
x
,min
y
) of C
21: Count n
in
← number of points in C inside T
22: if n
in
≥ 3 then
23: return SAFE
24: else
25: return UNSAFE
26: end if
analyzes front-view images captured from the ware-
house. The method makes use of the Segment Any-
thing Model (SAM) for segmentation, followed by a
centroid-based triangle inclusion test that determines
whether bars are properly aligned with a predefined
safe region (see Algorithm 2). The key assumption
is that safely stacked bars should appear concentrated
within a virtual support triangle, a geometrically de-
fined region approximating the expected spatial dis-
tribution of correctly braced bar ends. If a sufficient
number of bar-end centroids fall within this triangle,
the configuration is classified safe.
Each front-view image is processed by a pre-
trained SAM mask generator configured for high seg-
mentation precision. The algorithm identifies candi-
date bar ends by filtering the generated masks based
on their pixel area and circularity, properties that in-
dicate compact and rounded support elements. Af-
ter extracting valid bar centers from the image, the
algorithm attempts to form a support triangle by se-
lecting three reference points: the leftmost-bottom,
rightmost-bottom, and topmost-center among the de-
Safety-Centric Monitoring of Structural Configurations in Outdoor Warehouse Using an UAV
475

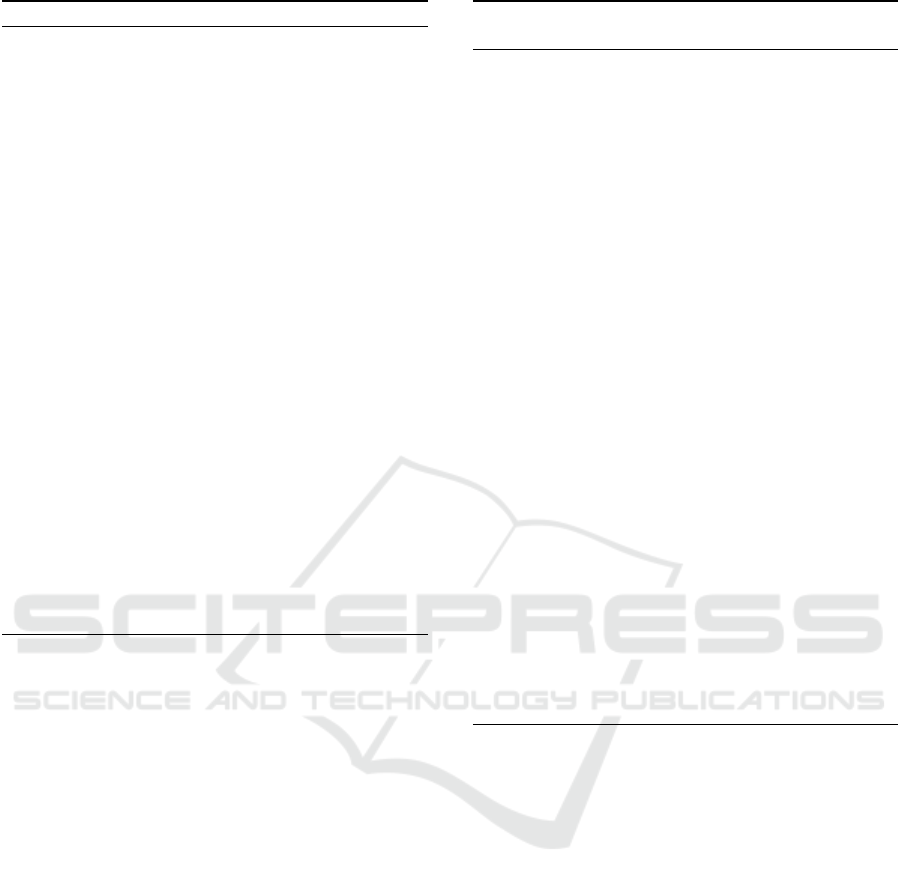
(a) Top-view support masks (b) Front-view safety triangle
Figure 3: Qualitative results of (a) dual-SAM support detection in top views (Green: the detected supports, Red: the not safe
box, Blue: the safe box), and (b) triangle-based safety validation in front views.
tected bar coordinates. This triangle is then used as
a geometric proxy for evaluating structural support.
If three or more detected bar ends are found within
the triangle, the bay is classified as structurally SAFE.
Otherwise, it is marked as UNSAFE, indicating insuf-
ficient frontal bracing. Each image is visually anno-
tated with this classification and saved for operator
review. Finally, a CSV report summarizing per-image
safety status and detection counts is generated to sup-
port large-scale batch analysis.
This frontal safety check complements the top-
view analysis by enforcing a spatial constraint on bar
placement. Together, the two modules form a com-
prehensive safety validation system, operating on dual
views to ensure structural compliance.
5 OBTAINED RESULTS
This section presents both qualitative and quantitative
evaluations of the proposed dual-SAM and triangle-
based safety monitoring framework. The system has
been tested on real-world video footage collected in
operational steel bar storage facilities under varying
environmental conditions. The results demonstrate
the framework’s ability to perform robust and inter-
pretable safety validation from both top- and front-
view perspectives.
5.1 Qualitative Evaluation
Top-View Support Detection. Figure 3a illustrates
representative results of the top-view analysis. Green
masks correspond to small-scale structural support el-
ements detected via SAM, while red regions indicate
initially unsafe bulk areas. Regions satisfying the
proximity reclassification criteria, i.e., those in con-
tact with at least three green masks, are re-annotated
in blue to denote structural support.
Across multiple scenarios, the proposed dual-
resolution segmentation approach consistently cap-
tured fine structural details (e.g., inclined supports
and wedges), even under partial occlusion and non-
uniform lighting. The use of morphological dilation
and mask proximity significantly reduces false nega-
tives, particularly in cluttered layouts. The resulting
visual overlays offer a high degree of interpretability
and enable clear identification of safety-critical zones
for operator intervention or automated alerts.
Front-View Safety Triangle. Figure 3b presents
examples of the triangle-based safety validation ap-
plied to front-view frames. Detected bar-end cen-
troids are plotted as yellow points, while the com-
puted support triangle is shown in cyan. Bays with
three or more centroids located within the triangle are
classified as ”SAFE” (annotated in green), whereas
those with insufficient frontal support are marked
”UNSAFE” (annotated in red).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
476

Table 1: Comparison of bar and triangle detection and safety classification.
Method Avg. Avg. Safety Bar Tri. Time
bars triangles acc. (%) FP FP (ms)
SAM (Lin and Ferrari, 2024) 12.3 9.5 60 1.2 1.0 100
U-Net (Ronneberger et al., 2015) 11.8 6.9 50 0.9 1.3 50
Edge + Hough (K
¨
alvi
¨
ainen et al., 1995) 2.4 0.1 20 1.5 3.4 70
This method proved effective in distinguishing
correctly stacked configurations from potentially haz-
ardous ones. It was particularly robust in identify-
ing over-extended bars or unevenly braced stacks,
where traditional methods based solely on segmen-
tation may fail to account for geometric safety con-
straints.
5.2 Quantitative Evaluation and
Observations
To further assess the effectiveness of the proposed
system, we performed a comparative evaluation in-
volving three methods: (1) SAM - the one proposed
in this work, (2) U-Net - a standard convolutional seg-
mentation model, and (3) edge-based detection with
probabilistic Hough transform - a classical geometric
approach.
Each method was applied to a dataset of annotated
top-view images, and their performance was mea-
sured across multiple safety-relevant metrics to assess
their effectiveness in detecting both structural compo-
nents (bars and supporting triangles) and their ability
to correctly classify scenes as safe or unsafe.
The dataset includes manually annotated ground
truth labels for the positions of steel bars and support-
ing triangles. These annotations serve as the basis for
computing detection accuracy and false positive rates.
Table 1 summarizes the results in terms of average
detections per frame, false positives, safety classifica-
tion accuracy, and inference time. Each column in
Table 1 reports specific aspects of the performance of
the evaluated methods:
• Average Bars (Avg. Bars): The average number
of correctly detected steel bars per frame, com-
pared against the annotated ground truth. Higher
values generally indicate better detection com-
pleteness.
• Average Triangles (Avg. Triangles): The aver-
age number of ground-truth support triangles cor-
rectly identified per frame. This metric reflects the
method’s ability to infer stable structural configu-
rations, which are critical for safety assessment.
• Safety Accuracy (Safety Acc.) (%): The percent-
age of frames for which the method correctly clas-
sified the scene as either safe or unsafe based on
the geometric reasoning applied to the detected
structures. This is the final downstream task.
• Bar False Positives (Bar FP): The average number
of bars detected per frame that do not correspond
to any annotated ground truth bar. A lower value
indicates higher precision.
• Triangle False Positives (Tri. FP): The average
number of detected triangles per frame that are
not supported by actual structural elements in the
ground truth. High false positives can lead to erro-
neous safety classification (e.g., falsely declaring
unsafe setups as safe).
• Time (ms): The average inference time per frame
in milliseconds, including segmentation, post-
processing, and safety classification. This gives
an indication of the method’s suitability for real-
time applications.
We can see from the obtained results that: SAM
achieved the highest accuracy in triangle detection,
contributing to more reliable safety classification
(60%, the average result among the tested methods).
However, it incurred the highest computational cost.
U-Net demonstrated a good balance between accu-
racy and efficiency, with moderate false positives and
acceptable safety classification results (50%). Edge
+ Hough was significantly faster but suffered from
low detection rates and poor classification accuracy
(20%), likely due to its sensitivity to noise and lack of
learned representations.
While the SAM-based approach showed promis-
ing structural detection capabilities, a safety classi-
fication accuracy of 60% indicates that substantial
room for improvement remains. This result should be
interpreted as a first-step baseline rather than a con-
clusive performance ceiling.
All methods demonstrated the capability to oper-
ate near real-time (10+ fps), but trade-offs between
accuracy and performance must be considered for de-
ployment in live monitoring systems.
These results highlight the trade-off between de-
tection quality and computational cost. While edge-
based methods offered lower latency, their limited
precision and geometric inference capabilities ren-
dered them unsuitable for reliable safety monitoring
in realistic scenarios. In contrast, the SAM-based
Safety-Centric Monitoring of Structural Configurations in Outdoor Warehouse Using an UAV
477

model approach provides a balanced compromise be-
tween robustness, interpretability, and runtime effi-
ciency, making it suitable for industrial deployment.
Next Steps: We acknowledge that the current eval-
uation is limited by dataset size and the scope of re-
ported metrics. To strengthen the quantitative anal-
ysis, we plan to significantly expand the annotated
dataset and compute standard detection metrics such
as precision, recall, and F1-score for each stage (bar
detection, triangle inference, safety classification).
This broader evaluation will provide a more compre-
hensive understanding of each method’s strengths and
failure modes, and help guide future improvements
in model architecture and rule design for industrial
safety validation.
6 CONCLUSION
We proposed an annotation-light vision framework
for real-time safety validation of steel bar storage in
outdoor industrial environments. By combining dual-
resolution zero-shot segmentation using SAM with
lightweight geometric reasoning, the system assesses
structural support from top and front views with no
manual labeling.
Key contributions include: (i) multi-scale SAM
mask generation for detecting both fine supports and
bulk materials, (ii) morphological proximity rules for
lateral support inference, (iii) triangle-based valida-
tion from frontal views, and (iv) efficient implemen-
tation suitable for real-world deployment.
Our method addresses key limitations of prior
work by avoiding task-specific annotations, handling
multi-scale structures, and offering interpretable,
geometry-driven safety decisions. Experimental re-
sults on real warehouse footage show reliable per-
formance under challenging conditions like occlusion
and clutter.
Future work includes extending to more complex
stacking scenarios, adding temporal smoothing, and
integrating multi-camera fusion. We also plan to
explore self-supervised fine-tuning of SAM for im-
proved low-contrast performance. This work lays the
foundation for fully automated structural safety mon-
itoring in heavy-industry logistics.
ACKNOWLEDGEMENT
The COGNIMAN project
1
, leading to this paper, has
received funding from the European Union’s Hori-
zon Europe research and innovation programme un-
der grant agreement No 101058477.
REFERENCES
Cen, J., Fang, J., and Shen, W. (2023). Segment anything in
3d with radiance fields. In Proceedings of ICCV.
Duda, R. and Hart, P. (1972). Use of the hough transforma-
tion to detect lines and curves in pictures. Communi-
cations of the ACM, 15(1):11–15.
Eiffert, S., Wendel, A., and Kirchner, N. (2021). Tool-
box spotter: A computer vision system for real-world
situational awareness in heavy industries. In IEEE
Conference on Automation Science and Engineering
(CASE).
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of ICCV.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A., Lo,
W.-Y., Doll
´
ar, P., and Girshick, R. (2023). Segment
anything. In Proceedings of ICCV.
K
¨
alvi
¨
ainen, H., Hirvonen, P., Xu, L., and Oja, E. (1995).
Probabilistic and non-probabilistic hough transforms:
overview and comparisons. Image and Vision Com-
puting, 13(4):239–252.
Lee, S. and Kim, H. (2021). Geometric primitive detec-
tion for structural support analysis. In Proceedings of
ICRA.
Lin, X. and Ferrari, V. (2024). Sam-6d: Zero-shot 6d object
pose estimation with segment anything. In Proceed-
ings of CVPR.
Patel, R. and Gupta, S. (2020). Automated safety violation
detection in manufacturing through vision ai. IEEE
Transactions on Industrial Informatics, 17(5):3502–
3512.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Navab, N., Hornegger, J., Wells,
W. M., and Frangi, A. F., editors, Medical Image Com-
puting and Computer-Assisted Intervention – MICCAI
2015, pages 234–241, Cham. Springer International
Publishing.
Smith, J. and Lee, P. (2019). Vision-based automation and
safety in industrial environments: A survey. IEEE
Transactions on Automation Science and Engineer-
ing, 16(4):1548–1565.
Wu, Y. and Zhang, X. (2019). Multi-scale image segmen-
tation using deep learning for industrial applications.
Pattern Recognition Letters, 120:109–116.
Zhang, L., Chen, Y., and Zhao, J. (2022). Proximity-based
support verification in robotic assembly. In Proceed-
ings of IROS.
1
www.cogniman.eu
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
478
