
Translating NWP Outputs into UAV-Specific Predictions Using
Machine Learning
David Sládek
a
Department of Military Geography and Meteorology, Faculty of Military Technologies,
University of Defence, Kounicova 65, Brno, Czech Republic
Keywords: UAV Operations, Numerical Weather Prediction (NWP), Machine Learning, GFS, AROME, ARPEGE,
Drone Weather Forecasting, Local-Scale Prediction, Weather-Aware Autonomy.
Abstract: Unmanned Aerial Vehicles (UAVs) are increasingly deployed in safety-critical, weather-sensitive operations.
However, the direct use of Numerical Weather Prediction (NWP) model outputs often fails to address the
specific operational thresholds and spatial–temporal needs of UAV missions. This study introduces a machine
learning (ML) framework that translates standard NWP forecasts into UAV-specific feasibility assessments.
We integrate both global (GFS) and local high-resolution (ARPEGE, AROME) models to generate real-time,
interpretable indices or GO/NO-GO indicators tailored to UAV performance limits. Our case study over
Nantes (France) for the 2017–2023 period demonstrates the added value of ML-enhanced predictions in terms
of spatial precision, temporal consistency, and decision-support utility. The proposed approach also offers an
effective method to fill gaps in local model availability by learning from global models, ensuring continuity
and operational resilience. By combining observation statistics, NWP forecasts, and ML interpretation, this
methodology supports scalable, automated pre-flight planning under varying weather scenarios.
1 INTRODUCTION
Weather forecasts play a critical role in aviation and
other domains requiring safety-critical, time-sensitive
decisions. In crewed aviation, meteorological
products are issued under strict national and
international guidelines (e.g., WMO, ICAO), with
standardized thresholds, formats, and declared
accuracy metrics. With the increasing use of
unmanned aircraft systems (UAS) for specialized and
autonomous missions, however, the demand for more
precise, localized, and machine-readable weather data
is growing rapidly (Simone et al., 2022).
This shift introduces new challenges. UAS
operations often rely on fine-grained, asset-specific
environmental thresholds—yet conventional
numerical weather prediction (NWP) systems are
inherently coarse in resolution and computationally
expensive. Addressing this gap requires techniques
that can translate general NWP outputs into
personalized, actionable products tailored to a
specific platform or task.
a
https://orcid.org/0000-0002-4418-3203
Recent advances in machine learning (ML), deep
learning (DL), and IoT offer promising pathways.
These methods have demonstrated success in
enhancing NWP through spatiotemporal pattern
recognition (Ren et al., 2021; Ahmad et al., 2023),
automated statistical post-processing (Rio et al.,
2019), real-time data fusion via IoT networks (Wang
et al., 2022), localized forecasting through
crowdsourced systems (Bindhu, 2020).
While, most studies focus on improving generic
forecast accuracy, operationally relevant
forecasting—e.g., predicting when a UAV can or
cannot fly—remains underexplored. Few works
address how meteorological data can be mapped to
mission-specific thresholds, or how learning models
can be adapted to different assets.
This leads to our central research question:
How well can we predict the personalized operational
limits of specific assets based on various
meteorological data?
This study focuses on learning asset-specific
operational limits from heterogeneous meteorological
184
Sládek, D.
Translating NWP Outputs into UAV-Specific Predictions Using Machine Learning.
DOI: 10.5220/0013674100003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 184-191
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

data. Specifically, two integration strategies are
employed: (1) Data-driven ML forecasting, which
learns from historical data or reanalysis (e.g., ERA5)
to generate lightweight, high-resolution predictions
(Ben-Bouallegue et al., 2023), (2) Hybrid ML-NWP
post-processing, where ML enhances assimilation
and post-processing steps (Dong et al., 2023)
Before deploying such systems in aviation, both
benefits and challenges must be considered:
• Benefits: improved accuracy (Sengoz et al.,
2023; Patriarca et al., 2023), faster computation
(Weyn et al., 2020), and enhanced forecast
calibration (Bouallègue et al., 2023)
• Challenges: smoothness bias, difficulty
predicting extremes, integration hurdles, and
regional data inconsistencies (Zhong et al., 2023)
2 DATA AND METHODS
This study builds on the concept of performance
indexes as representations of prediction metadata
(Lombardi et al., 2025) to explore a complete pipeline
for a fully automated weather-based decision support
system. A central challenge is the inhomogeneity of
meteorological data—in format, resolution, content,
and timing.
As Lombardi et al. (2025) note, forecast products
vary significantly across lead times, shifting from
coarse global models to fine-scale local outputs and
finally to real-time observations. We address this with
an ML-based method that supports seamless
transitions between forecast products across planning
and operational phases.
For UAV mission planning, we define seven
categories of meteorological inputs:
• Climate Data – Long-term atmospheric trends
relevant to asset performance.
• Global NWP Forecasts – Medium- to long-
range outputs, up to 21 days ahead.
• Local NWP Forecasts – High-resolution data
available ~72 hours before operations.
• TAF Forecasts – Standard aviation text
forecasts, issued ~24–30 hours in advance.
• Landing Forecasts – Final high-resolution
updates for the approach phase.
• Current Observations – Real-time data from
radar, METARs, or satellites.
• Secondary Products – Crowdsourced or site-
specific data (e.g., webcams, field reports).
This taxonomy enables phase-specific use of
meteorological products, and highlights the need for
adaptive ML models that handle heterogeneous
inputs.
Proposed framework deals with the transition
between the products described in the Table 1 with
basic ML algorithms.
Table 1: Overview of the sources interpreted in this study.
Source Information provided
Climate
Data
Avera
g
e annual fl
y
able hours
Optimal asset type selection based on
historical patterns
Global
Model
General operational suitability for a
selected asset (VRFI)
Anticipated energy consumption
(EER)
Local
Model
Forecasts with hi
g
h spatial resolution
Forecasts with hourl
y
g
ranularit
y
Given the differing nature of Terminal Aerodrome
Forecasts (TAF) and Landing Forecasts provided by
professional meteorologists, as well as nowcasting
methods that rely on real-time observations and
measurements, our current focus is on these available
sources.
2.1 Operational Principles
As UAV operations scale, meteorological systems
must move beyond single-airport support. Our
proposed framework is built on the following
principles:
• Automation – End-to-end, minimal human input;
• Machine Readability – Output in gridded formats
(e.g., NetCDF) for autonomous systems;
• Objectivity – Data-driven decision logic;
• Transparency – Traceable inputs and outputs;
• Relevance – Context-aware, concise outputs;
• Localization – Tailored to local conditions;
• Scalability – Compatible with diverse sources
and missions;
• Human-Like Output – Visuals that support
expert validation;
This framework ensures accurate, scalable, and
interpretable support for automated UAV operations
in an evolving technological and regulatory
landscape.
2.2 Machine Learning Algorithms
We adopt a classification-based ML approach, aiming
to determine whether forecasted conditions are
favourable or unfavourable for a specific asset—a
binary classification problem labelled by finally
Translating NWP Outputs into UAV-Specific Predictions Using Machine Learning
185
observed conditions. For mapping transitions
between forecast runs and lead times, regression tasks
are used. The selected models span a range of
complexity, interpretability, and robustness, as
summarized in Table 2.
Table 2: Utilised ML algorithms with their expected role in
the study.
Model Remark
Logistic
Regression
Simple, interpretable, effective with
linearly separable data
Decision
Tree
Handles non-linearity;
interpretable; prone to overfitting
Random
Forest
Reduces overfitting, handles
imbalanced data with class weighting
Gradient
Boosting
Powerful, reduces bias, effective
with imbalanced data
AdaBoost
Focuses on misclassified cases,
robust to outliers
KNN
Non-parametric, works well with
small datasets, sensitive to imbalances
2.3 Performance Indicators
Building on previously published work (Lombardi et
al, 2025), we use a framework of indices (Table 3)
that label a prediction based on its relevance to the
flying asset.
Table 3: Selected performance indicators as established by
previous research (Lombardi et al, 2025).
Name Description Value
Vehicle
Related
Feasibility
Index
(VRFI)
Probability that the
predicted values will not
exceed the thresholds
specified for the vehicle
in the mission
0 – surely worse
than threshold
1 – surely better
than threshold
Energy
Efficiency
Rating
(EER)
Estimated energy cost of
flight (direction-
dependent)
0 – min
+∞ – max
These indexes used as labels allow us to assess
both forecast accuracy and operational utility,
bridging physical forecasts with mission-specific
decision-making.
2.4 Observations Statistics
We use METAR reports from Nantes Atlantique
Airport (LFRS) covering 2011–2023, compliant with
ICAO Annex 3. These include wind direction and
speed, visibility, weather phenomena (e.g., fog,
precipitation), temperature and dew point, cloud
cover and ceiling. This dataset serves as:
• Ground truth for model validation
• Basis for computing performance indices (VRFI
and EER)
2.5 NWP Models
We use both global and local NWP models to support
different forecast horizons.
2.5.1 Global Model
The Global Forecast System (GFS) by NOAA (0.25°
× 0.25° resolution) provides up to 16-day forecasts,
ideal for long-range planning. Key It is initialized at
00, 06, 12, and 18 UTC with forecast intervals: 12-
hour steps, then 3-hour steps below 240h horizon.
As noted in the literature (Benjamin et al., 2016;
Baars et al., 2005), effective GFS use requires
attention to: (1) Forecasted values, (2) Temporal
trends and lead-time consistency, (3) Model
reliability and bias characteristics.
Because raw GFS output is complex, we translate
it into probabilistic, threshold-based forecasts,
answering:
“What is the probability this forecast meets
operational limits?”
This aligns with our use of performance indices
(Section 2.3) and supports actionable decision-making.
2.5.2 Local Models
Local models capture mesoscale phenomena critical
to UAV operations. For the Nantes region, we use:
ARPEGE (5 km resolution, Météo-France) and
AROME (1.3 km resolution, convection-permitting)
A key innovation is predicting local model output
from global model input, enabling early
approximation before high-resolution forecasts are
available. This supports:
• Continuous forecasting across model transitions
• Uncertainty quantification before local model
initialization
Though global and local models share similar data
structures (e.g., GRIB, NetCDF), the higher fidelity
of local models improves classification near critical
thresholds.
3 RESULTS
In this section, we present the interpretation of each
data product and demonstrate their integration across
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
186
forecasting horizons, focused on a use case near the
French city of Nantes. The scenario involves
unmanned aerial vehicle (UAV) flight planning under
operational constraints: Wind limits of 10, 12, or
15 m·s⁻¹, Temperature range between −10 °C and
40 °C, Visual Meteorological Conditions (VMC)
required for operation.
These constraints were applied consistently
across observations and forecast models to evaluate
the Vehicle Related Feasibility Index (VRFI) under
both historical and predictive scenarios.
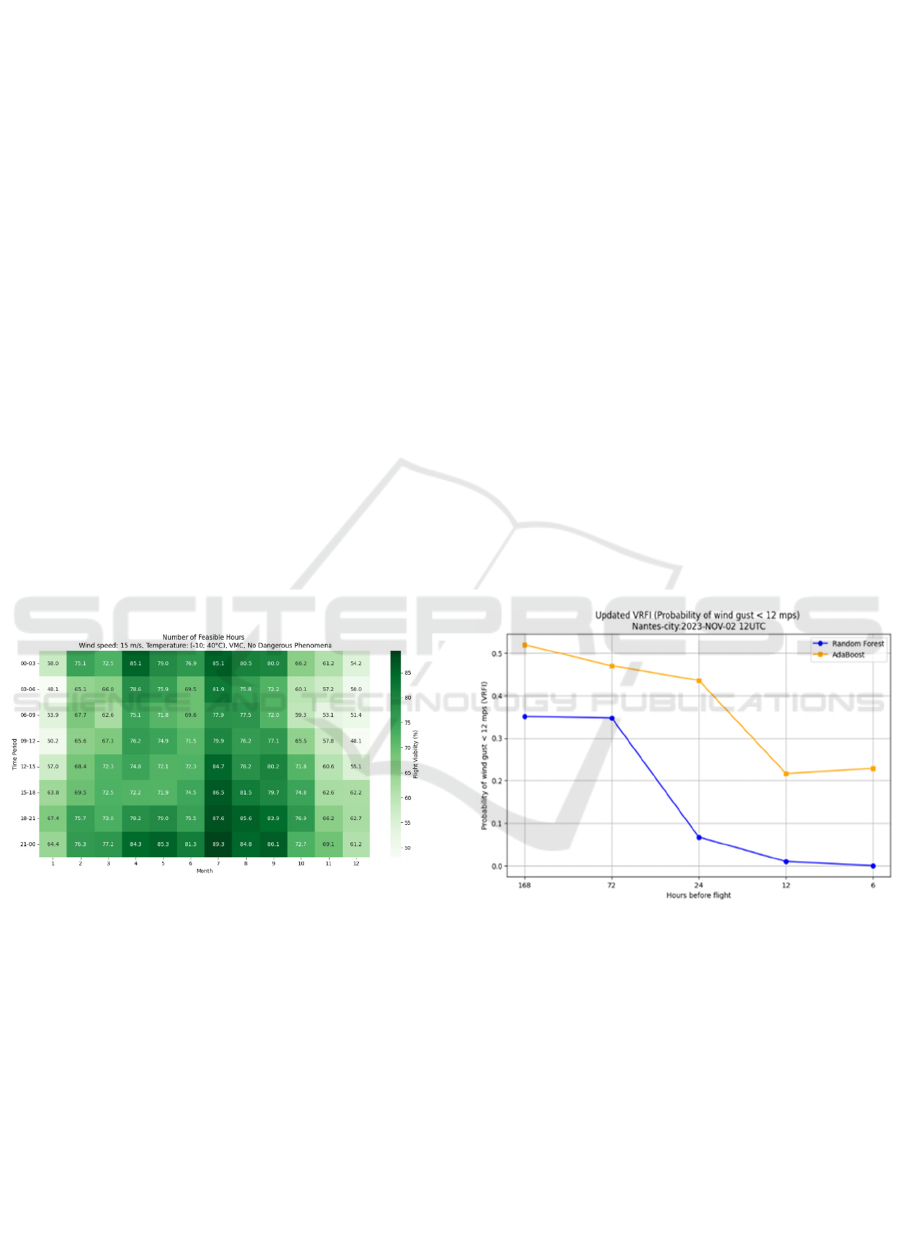
3.1 Observations
The statistical overview offers essential long-term
insight into UAV operational feasibility at the target
site. Instead of presenting separate charts for each
variable (e.g., wind, visibility, temperature), we use
an integrated heatmap approach to visualize overall
operational suitability over time.
The following heatmap (Figure 1) captures
seasonal and diurnal patterns. Darker cells from June
to September indicate fewer weather-related
constraints, while lighter cells in winter—especially
January—highlight adverse conditions in up to 50%
of hours, often due to IMC, strong winds, or freezing
precipitation.
Figure 1: Percentage of hours of flight viability by month
and the three-hour window in Nantes Airport.
Such patterns simulate expert forecaster knowledge:
• Morning fog in colder months from radiation or
advection processes;
• Afternoon convection in summer causing
temporary disruption.
These observations support operational planning
(e.g., identifying optimal months or times) or risk
mitigation (e.g., reserving backup windows or
alternate sites).
Overall, the heatmap serves as:
• A compact, user-friendly climate overview
tailored to UAV limits;
• A static data layer for clustering or meta-model
integration.
At Nantes airport, for example, long-term
unsuitability in January contrasts with generally
favourable summer months. These insights enable
statistical prediction and planning aligned with UAV-
specific thresholds.
3.2 Global Models
To assess medium-range forecasting potential, we
applied both Random Forest and AdaBoost machine
learning models to data from the GFS global model,
focusing on a forecast horizon of 168 hours (7 days)
to 6 hours prior to the intended UAV operation. For
this analysis, we performed the training on 80/20
train/test split dataset from years 2015-2022.
These algorithms were selected based on their
superior performance during initial validation, and
were used to compute the Vehicle-Related Feasibility
Index (VRFI)—i.e., the probability that the mission
will be feasible given forecasted conditions.
Despite the relatively coarse spatial resolution of
the GFS (0.25° grid), the models accurately captured
synoptic-scale signals, including a cold frontal
passage on 2
nd
November 2023 that led to a notable
decrease in predicted feasibility (
Figure
2).
Figure 2: Probability of wind gust lower than 12 m.s-1
meaning feasibility of mission predicted by Random Forest
and AdaBoost 168 to 6 hours before flight.
Both Random Forest and AdaBoost models
exhibited consistent temporal trends, though Random
Forest tended to underestimate feasibility (i.e., more
pessimistic) and AdaBoost was slightly more
optimistic in its predictions.
Despite the high complexity of the situation, these
outputs demonstrate that even one week in advance,
a well-trained model can provide meaningful early
warning to decision-makers, allowing for adaptive
scheduling or contingency planning.
Translating NWP Outputs into UAV-Specific Predictions Using Machine Learning
187
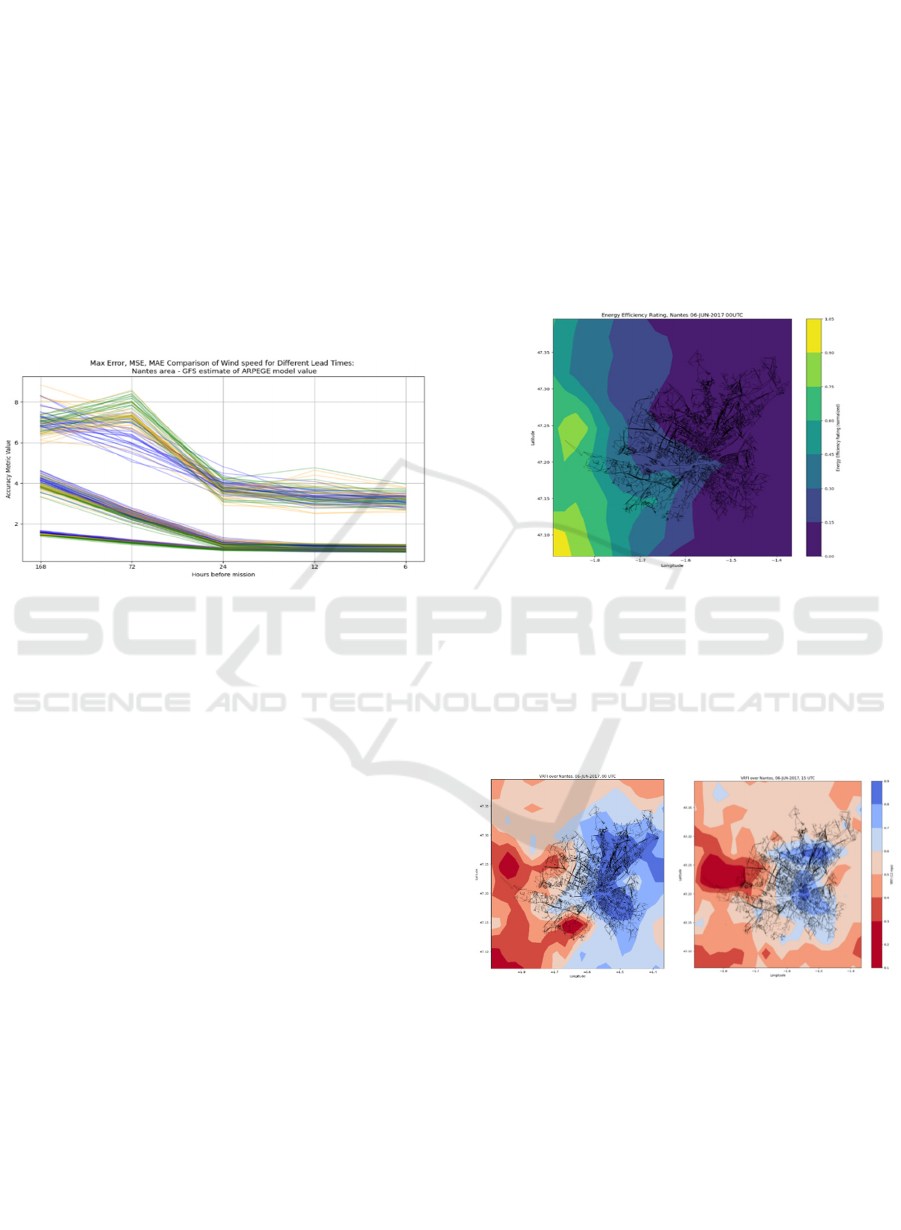
3.3 Local Models
In this part of the study, we tested whether global
model forecasts (specifically GFS) can serve as
reliable proxies for high-resolution local model
outputs (ARPEGE, AROME), particularly when
local forecasts are unavailable or delayed. The goal is
to bridge spatial and temporal resolution gaps using
machine learning (ML).
We trained regression models (Random Forest,
Gradient Boosting, Support Vector Regression) on
forecasts from 2017–2019, using GFS data to predict
ARPEGE outputs (Figure 4). These models were then
applied to AROME forecasts (1.3 km resolution)
over ~300 grid points in the Nantes region. (Figure 3).
Figure 3: Comparison of Random Forest (blue), Gradient
Boosting (green), and SVM (yellow) algorithms predicting
ARPEGE wind speed predictions in Nantes area based on
the GFS global predictions. (Highest values: Max error,
middle: MSE, lowest values: MAE).
The models performed well, especially for 10 m wind
speed:
• Mean Absolute Error (MAE) was consistently
<2 m·s⁻¹ within a 24-hour lead time.
• Maximum errors rarely exceeded 5 m·s⁻¹, even
up to a week ahead.
• Day-ahead forecasts showed good agreement,
with errors stabilizing around 4 m·s⁻¹.
These results suggest ML-based smoothing of global
forecasts can approximate local outputs with high
fidelity during synoptic stability. Larger
discrepancies were observed during convective
activity, frontal transitions, or terrain-driven
turbulence—primarily due to limitations in input data
resolution, not ML model design.
Despite this, local models remain essential for:
• Vertical profiling and convection-permitting
outputs;
• Finer representation of terrain and
mesoscale features;
• Improved gradients in wind and temperature
fields.
Combined with ML, local models offer a smoother,
more interpretable depiction of atmospheric
conditions. For example, we used wind-related
predictions to estimate UAV energy consumption,
presenting wind influence as a color-contoured field
instead of traditional wind barbs (Figure 4).
On 6 June 2017, this approach captured the
evolution of operational conditions as a frontal
system passed over Nantes. Early in the day, forecasts
indicated generally favorable flying conditions
(Figure 6 left), but by late afternoon, feasible flight
zones were restricted to the eastern urban area (Figure
6 right).
Figure 4: Energy Efficiency Rating for flight to the
northeast in Nantes on 6th June 2017 showing transition of
the headwind in NE part and tailwind in the SW.
However, as the front advanced and passed over
the region, the area with a high probability of safe
UAV operations narrowed—eventually being limited
to the eastern urban area of Nantes (Figure 7).
Figure 5: Vehicle Related Feasibility Index (VRFI) over
Nantes based on ARPEGE model on 06
th
June 2017 at 00
UTC and 15 UTC. Roads shown in black.
High-resolution AROME forecasts provided even
more detailed insights with hourly resolution. ML
models maintained predictive stability above 97%,
enabling confident classification of GO/NO-GO
decisions based on platform-specific wind thresholds.
For instance, Drone 1 and 3 had a max limit of
10 m·s⁻¹; Drone 4 was configured for 15 m·s⁻¹.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
188
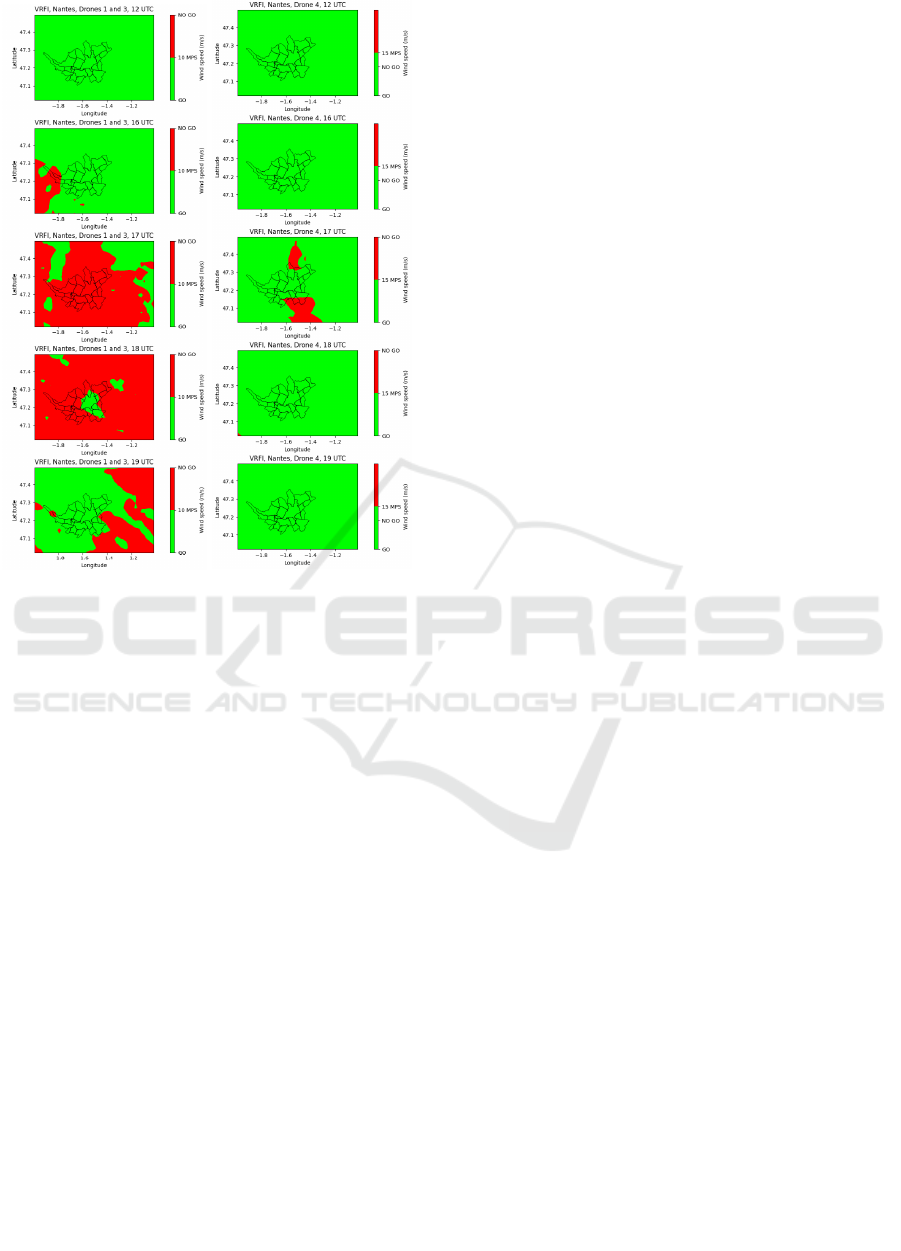
Figure 6: Vehicle Related Feasibility Index (VRFI) for
drone of operational maxima of wind speed 10 m·s⁻¹ (left)
and 15 m·s⁻¹ (right) for 12 and 16-19 UTC during passage
of the frontal system over the area (City district contours
represented by black lines).
These results show that ML-enhanced local
models can effectively track dynamic atmospheric
features and translate them into operationally relevant
outputs. Minor timing offsets between ARPEGE and
AROME were observed, but spatial patterns
remained consistent. The ML confidence scores also
served as a proxy for model reliability, offering
valuable metadata for decision support in UAV
operations.
4 DISCUSSION
As UAV deployments expand across critical
infrastructure, emergency response, and logistics, the
need for predictive tools supporting real-time
operational decision-making continues to grow.
Traditional aviation forecasting relies heavily on
human interpretation of multi-source model data and
TAFs. However, this study contributes to the ongoing
shift toward automated, user-specific forecast
interpretation using machine learning (ML),
particularly via the Vehicle Related Feasibility Index
(VRFI) and Energy Efficiency Rating (EER)
(Lombardi et al., 2025).
Our primary objective was to develop and
validate a modular ML framework that translates
NWP outputs into actionable UAV mission guidance.
Special attention was given to handling forecast
transitions—from GFS to ARPEGE to AROME—
which vary in spatial resolution and update
frequency, posing challenges to consistency. We
addressed this via a predictive chain that classifies or
regresses meteorological data into mission-relevant
outputs and harmonizes across forecast products
using learned statistical relationships.
A secondary goal was to assess whether global
model outputs (GFS) could approximate local model
behaviour (ARPEGE, AROME), providing
continuity during periods when high-resolution data
are unavailable.
Building on the concept of prediction metadata
indices (Lombardi et al., 2025), our method shifts
from raw meteorological values to decision-oriented
scores. Prior works have focused on MOS and short-
term nowcasting (e.g., Baars et al., 2005; Benjamin et
al., 2016), often limited to single-model input or short
lead times. We extend this by integrating multi-tiered
ML pipelines, combining long-range global data with
high-resolution forecasts, while preserving
interpretability through standardized indices.
Our results demonstrate that ML can:
• Predict AROME wind speed from GFS inputs
with good accuracy (MAE < 2 m·s⁻¹),
• Translate raw forecasts into binary GO/NO-GO
decisions, aligned with UAV safety thresholds,
• Detect transitions and instabilities, such as
frontal passages, up to 7+ days in advance using
GFS alone.
VRFI-based predictions showed consistency
across models (Random Forest, AdaBoost), with
model confidence often exceeding 97%, indicating
robustness under synoptic-scale predictability.
Additionally, AROME-based urban-scale forecasts
enabled high-resolution spatial visualizations,
including GO/NO-GO maps and energy efficiency
gradients, supporting user-facing decision tools.
These outcomes support a paradigm shift in
aviation meteorology—from static, generalized
products to dynamic, asset-specific prediction
workflows. The proposed framework enables:
• Real-time translation of forecasts into UAV-
relevant indices,
• Seamless model transitions across forecast
horizons,
• Continuous situational awareness in both
strategic and tactical windows.
Translating NWP Outputs into UAV-Specific Predictions Using Machine Learning
189

Such capabilities can be embedded into
operational platforms for UAV operators, civil
protection agencies, or airport authorities.
Despite encouraging results, several limitations
remain:
• Convective and mesoscale phenomena led to
greater errors (e.g., peak wind deviations > 4
m·s⁻¹), likely due to coarse input resolution
rather than model limitations.
• The geographic scope was limited to the Nantes
region; generalizability to other climates or
terrains (e.g., mountainous or tropical) requires
further validation.
• While index-level interpretability was achieved,
internal model explainability (e.g., SHAP values,
feature importance) was not explored in depth.
Additionally, while our focus was on forecast-based
decision support, nowcasting remains critical,
particularly in the final 0–2 hours before take-off or
landing. Previous work (Lombardi et al., 2025)
identified this as the most tactically significant
period. Future work will enhance this window using
high-resolution satellite, radar, and in-situ data.
Planned extensions of this research include:
• Transitioning to probabilistic classification,
incorporating additional indices (e.g., Vehicle
Source Reliability Index, VRSRI).
• Integration of ensemble NWP systems (e.g.,
ECMWF-EPS) for enhanced uncertainty
modelling.
• Utilization of the latest geostationary sounding
satellite data for improved verification.
• Applying meta-learning techniques to
dynamically adapt model selection and feature
prioritization by region and mission profile.
5 CONCLUSIONS
This study demonstrated the feasibility of a fully
automated, ML-based framework for forecasting
UAV-operational weather conditions across all
planning phases. By integrating global (GFS) and
local (ARPEGE, AROME) NWP models with
METAR observations, we addressed key challenges
in aviation meteorology, notably the transition across
forecast products with differing resolutions and
update cycles.
Our results show that ML models can reliably
translate raw forecasts into actionable, asset-specific
indices such as the Vehicle Related Feasibility Index
(VRFI) and Energy Efficiency Rating (EER). This
supports consistent decision-making from long-range
planning to short-term execution, even during data-
sparse periods.
Moreover, user-centered outputs like GO/NO-GO
maps and climatological heatmaps enhance the
interpretability and relevance of forecast products for
UAV mission planning.
Despite strong performance in synoptic regimes,
limitations remain in capturing convective and fast-
evolving weather patterns—highlighting the need for
future integration of nowcasting methods and real-
time observational data.
Overall, the proposed framework offers a scalable
foundation for operational, data-driven UAV
forecasting and sets the stage for further research into
adaptive, real-time meteorological decision support
systems.
ACKNOWLEDGEMENTS
The work was supported by the Project for the
Development of the Organization, DZRO VAROPS
Military Autonomous and Robotic Assets of the
Ministry of Defence, Czech Republic.
REFERENCES
Ahmad, F., Tarik, M., Ahmad, M., & Ansari, M. (2023).
Weather Forecasting Using Deep Learning Algorithms.
2023 International Conference on Recent Advances in
Electrical, Electronics & Digital Healthcare
Technologies (REEDCON), 498-502. https://doi.org/
10.1109/REEDCON57544.2023.10150439.
Baars, Jeffrey A. a Mass, Clifford F. (2005). Performance
of National Weather Service Forecasts Compared to
Operational, Consensus, and Weighted Model Output
Statistics. Online. Weather and Forecasting. 2005, Vol.
20, no. 6, pp. 1034-1047. ISSN 1520-0434.
https://doi.org/10.1175/WAF896.1.
Ben-Bouallegue, Z., Clare, M., Magnusson, L., Gascón, E.,
Maier‐Gerber, M., Janoušek, M., Rodwell, M., Pinault,
F., Dramsch, J., Lang, S., Raoult, B., Rabier, F.,
Chevallier, M., Sandu, I., Dueben, P., Chantry, M., &
Pappenberger, F. (2023). The rise of data-driven
weather forecasting: A first statistical assessment of
machine learning-based weather forecasts in an
operational-like context. Bulletin of the American
Meteorological Society. https://doi.org/10.1175/bams-
d-23-0162.1.
Benjamin et al. 2016, A North American Hourly
Assimilation and Model Forecast Cycle: The Rapid
Refresh. Monthly Weather Review, 144, 1669-1694.
https://doi.org/10.1175/MWR-D-15-0242.1
Bhagavathi, S., Thavasimuthu, A., Murugesan, A.,
Rajendran, C., A, V., Raja, L.,Thavasimuthu, R. (2021).
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
190

Weather forecasting and prediction using hybrid C5.0
machine learning algorithm. International Journal of
Communication Systems, 34. https://doi.org/10.
1002/dac.4805.
Bindhu, V. (2020). Design and Development of Automatic
Micro Controller based Weather Forecasting Device.
Journal of Electronics and Informatics. 2020.
https://doi.org/10.36548/jei.2020.1.001.
Bouallègue, Z., Cooper, F., Chantry, M., Düben, P.,
Bechtold, P., & Sandu, I. (2023). Statistical Modelling
of 2m Temperature and 10m Wind Speed Forecast
Errors. Monthly Weather Review. https://doi.org/10.
1175/mwr-d-22-0107.1.
Boukabara, S., Krasnopolsky, V., Stewart, J., Maddy, E.,
Shahroudi, N., & Hoffman, R. (2020). Realizing the
Benefits of AI across the Numerical Weather Prediction
Value Chain. Bulletin of the American Meteorological
Society. https://doi.org/10.1175/BAMS-D-18-0324.A.
Dong, R., Leng, H., Zhao, C., Song, J., Zhao, J., & Cao, X.
(2023). A hybrid data assimilation system based on
machine learning. Frontiers in Earth Science 10.
https://doi.org/10.3389/feart.2022.1012165.
Gao, M., Hugenholtz, C.H., Fox, T.A. et al. Weather
constraints on global drone flyability. Scientific Reports
11, 12092 (2021). https://doi.org/10.1038/s41598-021-
91325-w
Ghirardelli, J., & Glahn, B. (2010). The Meteorological
Development Laboratory’s Aviation Weather
Prediction System. Weather and Forecasting, 25, 1027-
1051. https://doi.org/10.1175/2010WAF2222312.1
Joshi, V., Jadhav, P. (2024). A Comprehensive Study on
Weather Predicting Automation Bot Using Automation
Software and Machine Learning. 2024 Asia Pacific
Conference on Innovation in Technology (APCIT), 1-6.
https://doi.org/10.1109/APCIT62007.2024.10673441.
Lombardi, M., Sladek, D., Simone F., Patriarca, R. (2025).
No more flying blind: Leveraging weather forecasting
for clear-cut risk-based decisions. Online.
Transportation Research Interdisciplinary
Perspectives., Vol. 30. ISSN 25901982. https://doi.org/
10.1016/j.trip.2025.101349
NCEP GFS 0.25 Degree Global Forecast Grids Historical
Archive. Research Data Archive at the National Center
for Atmospheric Research. (2015). In NCEP GFS 0.25
Degree Global Forecast Grids Historical Archive.
National Centers for Environmental
Prediction/National Weather Service/NOAA/U.S.
Department of Commerce, Computational and
Information Systems Laboratory
Patriarca, R., Simone, F., & Di Gravio, G. (2023).
Supporting weather forecasting performance
management at aerodromes through anomaly detection
and hierarchical clustering. Expert Systems with
Applications, 213(Part C), 119210. https://doi.org/10.
1016/j.eswa.2022.119210
Ren, X., Li, X., Ren, K., Song, J., Xu, Z., Deng, K., &
Wang, X. (2021). Deep Learning-Based Weather
Prediction: A Survey. Big Data Research, 23, 100178.
https://doi.org/10.1016/j.bdr.2020.100178
Rio, J., Silva, P., Novo, I. (2019). Automatic Forecasts
Algorithms. Sexto Simposio Nacional de Predicción
"Memorial Antonio Mestre". https://doi.org/10.31978/
639-19-010-0.187.
Sengoz, C., Ramanna, S., Kehler, S., Goomer, R., & Pries,
P. (2023). Machine Learning Approaches to Improve
North American Precipitation Forecasts. IEEE Access,
11, 97664-97681. https://doi.org/10.1109/ACCESS.
2023.3309054.
Simone, F., Di Gravio, G., & Patriarca, R. (2022).
Performance-based analysis of aerodrome weather
forecasts. In 2022 New Trends in Civil Aviation (NTCA)
(pp. 27–33). IEEE. https://doi.org/10.23919/
NTCA55899.2022.9934004
Wang, Y., Ni, K., Wang, X., & Zhu, J. (2022). Design of
Automatic Weather Monitoring and Forecasting
System based on Internet of Things and Big Data. 2022
International Conference on Sustainable Computing
and Data Communication Systems (ICSCDS), 979-
982. https://doi.org/10.1109/ICSCDS53736.2022.9761
041
Wang, Y., Kim, S., Lyu, G., Lee, C., Lee, G., Min, K., &
Kafatos, M. (2023). Relative Importance of Radar
Variables for Nowcasting Heavy Rainfall: A Machine
Learning Approach. IEEE Transactions on Geoscience
and Remote Sensing, 61, 1-14. https://doi.
org/10.1109/TGRS.2022.3231125.
Weyn, J., Durran, D., & Caruana, R. (2020). Improving
Data‐Driven Global Weather Prediction Using Deep
Convolutional Neural Networks on a Cubed Sphere.
Journal of Advances in Modeling Earth Systems, 12.
https://doi.org/10.1029/2020MS002109.
Zhong, X., Yao, Y., Xu, L., Wu, Y., & Wang, Z. (2023).
WRF–ML v1.0: a bridge between WRF v4.3 and
machine learning parameterizations and its application
to atmospheric radiative transfer. Geoscientific Model
Development. https://doi.org/10.5194/gmd-16-199-
2023.
Translating NWP Outputs into UAV-Specific Predictions Using Machine Learning
191
