
Real-Time Sound Mapping of Object Rotation and Position in
Augmented Reality Using Web Browser Technologies
Victor Vlad
a
and Sabin Corneliu Buraga
b
Faculty of Computer Science, Alexandru Ioan Cuza University of Ias¸i, Romania
Keywords:
Spatial Audio, Augmented Reality, Web Browser, Object Tracking, Sound Localization, Web Audio API.
Abstract:
Growing focus on immersive media within the browser has been driven by recent advances in technologies
such as WebXR for augmented reality (AR), Web Audio API for spatial sound rendering and object tracking
libraries such as TensorFlow.js. This research presents a real-time system for spatial audio mapping of physical
object motion within a browser based augmented reality environment. By leveraging native Web technologies,
the system captures the rotation and position of real world objects and translates these parameters into dynamic
3D soundscapes rendered directly in the user browser. In contrast to conventional AR applications that neces-
sitate native platforms, the proposed solution operates exclusively within standard Web browsers, eliminating
the requirement for additional installations. Performance evaluations demonstrate the system’s proficiency in
delivering low-latency, directionally precise sound localization in real time. These findings suggest promising
applications within the interactive media domain and underscore the burgeoning potential of the Web platform
for advanced multimedia processing.
1 INTRODUCTION
Nowadays, there is a growing interest in enabling
real-time spatial interaction within Web browsers,
particularly in the context of augmented reality (AR)
and audio processing. Our paper explores the inte-
gration of physical object tracking with spatial sound
rendering (Sodnik et al., 2006; Montero et al., 2019)
using native Web technologies, evaluating the feasi-
bility and performance of a fully browser-based sys-
tem that maps real-world object motion to dynamic
audio cues in real time. This work builds upon recent
advancements in WebXR (McArthur et al., 2021), the
Web Audio API (Matuszewski and Rottier, 2023), and
TensorFlow.js library (Smilkov et al., 2019), which
together enable low-latency, high-fidelity spatial ex-
periences directly in modern (mobile) Web browsers
such as Google Chrome and Mozilla Firefox. More-
over, the depth estimation for sound position tracking
is achieved through the MiDaS model (Ranftl et al.,
2022), adapted for in-browser execution. AR visual-
ization is implemented using the WebXR API via the
A-Frame library (Mozilla VR Team, 2025).
To evaluate the system’s performance and reliabi-
a
https://orcid.org/0009-0005-8504-1964
b
https://orcid.org/0000-0001-9308-0262
lity, we conducted a series of benchmark tests measu-
ring computational latency, rendering frame rates, and
audio spatialization accuracy across various browsers
running on mobile devices.
This research holds significant value in academic
and applied domains, including auditory training,
human-computer interaction studies, assistive tech-
nologies for the visually impaired, interactive sound
installations, and browser-based AR applications for
educational, commercial and/or entertainment pur-
poses.
These experiments were primarily conducted on
Google Chrome version 136.0.7103.87 running on a
Samsung Galaxy S24 smartphone with Android 14.
We also performed several tests using Firefox for An-
droid version 138.0.2. The device used for our study
is equipped with a Snapdragon 8 Generation 3 pro-
cessor and 12 GB of RAM. Naturally, execution per-
formance may vary depending on the (mobile) Web
browser, the device hardware, and the available sys-
tem resources.
Paper Organization: The object tagging method
is described in Section 2, followed by the sound map-
ping based on rotation (Section 3). Additionally, we
present the depth estimation in Section 4. Section 5
details the position of a physical object in the AR con-
text. We close with related approaches (Section 6),
Vlad, V. and Buraga, S. C.
Real-Time Sound Mapping of Object Rotation and Position in Augmented Reality Using Web Browser Technologies.
DOI: 10.5220/0013672800003985
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 21st International Conference on Web Information Systems and Technologies (WEBIST 2025), pages 39-46
ISBN: 978-989-758-772-6; ISSN: 2184-3252
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
39
conclusions, and further research work.
2 OBJECT TAGGING AND
MODEL TRAINING WITH
YOLOV11 AND TENSORFLOW
To perform the proposed research studies, a meticu-
lously curated image corpus was assembled, encom-
passing a wide range of instances representing the tar-
get object. For experimental evaluation, the model
was trained on our dataset comprising 100 images de-
picting a plastic toy – Stitch, a fictional figure from
Disney’s animated franchise Lilo & Stitch (Walt Dis-
ney Animation Studios, 2002). We personally cap-
tured these images from multiple viewpoints to en-
sure variability in pose and orientation. Each image
underwent accurate annotation, including the precise
bounding box that delineates the character and the
corresponding viewing angle.
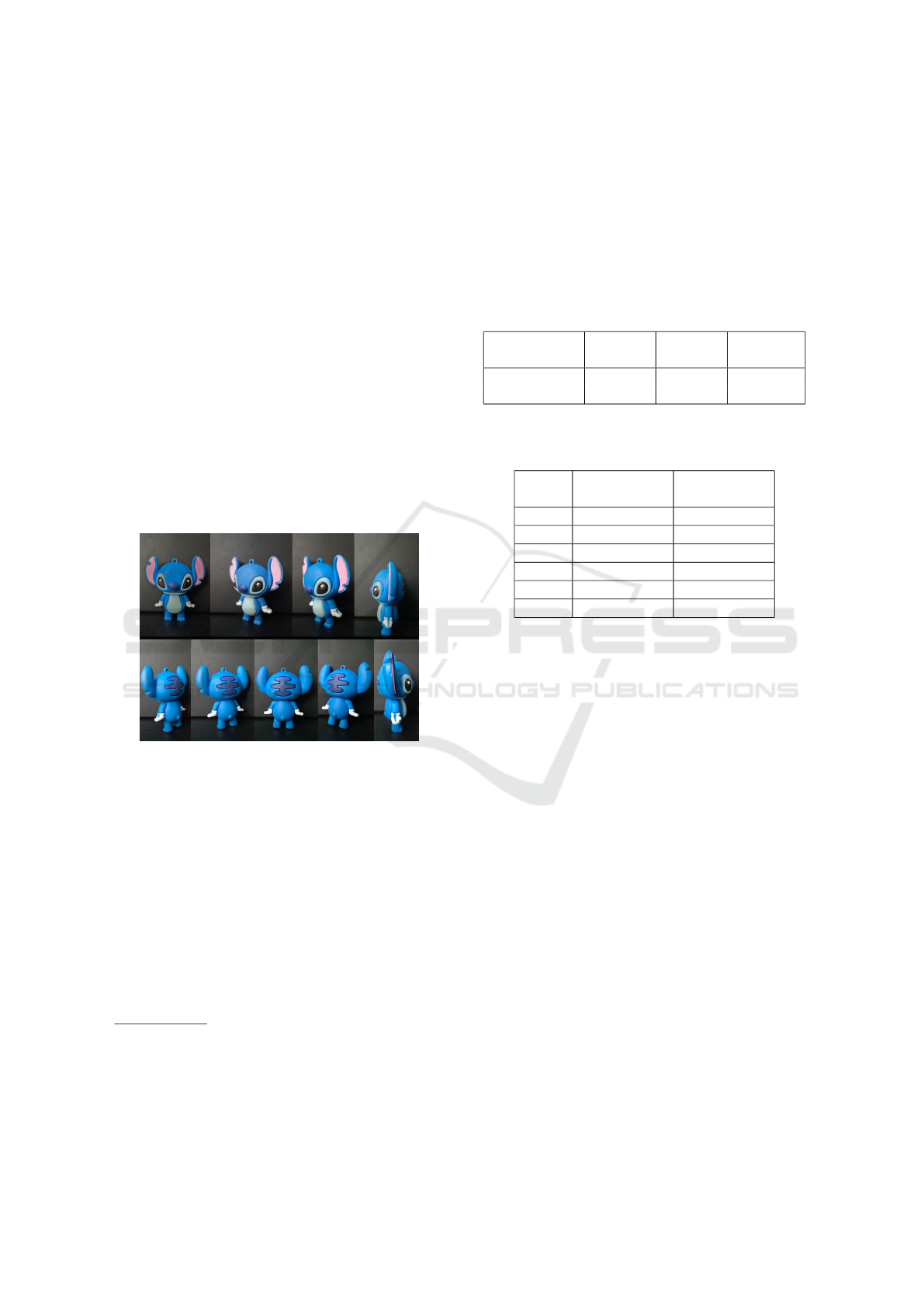
Figure 1: Sample images from the curated dataset showing
the plastic toy Stitch captured from various viewpoints.
Using Label Studio
1
, we carefully configured a la-
beling interface that allowed for the precise annota-
tion of bounding boxes around each toy figure (see
also Figure 1). This process was repeated for every
image in the dataset.
After finalizing the annotations, we exported them
in a format compatible with the TensorFlow (Smilkov
et al., 2019) object detection pipeline.
The model was initially trained using
YOLOv11s
2
, followed by YOLOv11m, in order
to evaluate and compare their effectiveness in
detecting the Stitch figurine across the annotated
1
Label Studio, a data labeling platform to fine-tune
Large Language Models (LLMs), prepare training data or
validate AI models – labelstud.io (Last accessed: May,
10th, 2025).
2
Ultralytics YOLO11 – docs.ultralytics.com/models/
yolo11/ (Last accessed: May 14th, 2025).
image dataset. While YOLOv11m exhibited superior
detection accuracy and recall, its increased architec-
tural complexity and capacity resulted in overfitting,
manifesting as a higher incidence of false positives.
Conversely, YOLOv11s achieved a more balanced
performance, characterized by a lower false positive
rate and faster inference times (consult Table 1).
Table 1: Comparative performance of YOLOv11m and
YOLOv11s in terms of precision, recall, and false positives.
Model Pre-
cision
Recall False
Positives
YOLOv11m 85.1% 93.6% High
YOLOv11s 92.3% 85.2% Low
Table 2: Frame processing time and object counts for the
first six frames on a mobile device.
Frame #Objects
Found
Processing
Time (ms)
1 1 64.20
2 1 62.85
3 1 58.67
4 1 59.44
5 1 62.18
6 1 64.73
As shown in the Figure 2 and Table 2, the results
confirm that the system can provide fast and reliable
output. This is a significant factor when developing
Web applications that handle video content in real-
time.
YOLOv11s exhibits strong results with very few
incorrect alerts and fast processing, making it a great
candidate for mobile systems that need quick video
processing. When used in Web applications running
inside a browser, as shown in this paper, its speed
helps keep things smooth for users while still finding
objects with high trustworthiness.
Acquiring precise performance data from a Web
browser running on a mobile phone presents signifi-
cantly greater challenges compared to data process-
ing on desktop platforms. This is due to the con-
strained access to low-level diagnostic tools and the
influence of background processes and power-saving
mechanisms that are more prominent in the mobile
environments.
At a high level, the system initiates with a video
source and continuously captures individual frames in
a loop (Algorithm 1). For each successfully retrieved
frame, the YOLO architecture is executed to perform
precise object detection. In a concurrent manner, the
MiDaS model is utilized to generate a corresponding
depth map (see Section 4), providing spatial context
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
40

Figure 2: Precise detection on the mobile device of the ori-
entation and bounding box of the Stitch toy.
Algorithm 1: Pseudo-code of the main loop: YOLO
object detection and MiDaS depth estimation.
Data: Video source
Result: Processed frames with object
detection and depth estimation
while video stream is active do
Read the next frame from the video
source
if frame could not be read then
Stop processing.
end
Perform object detection on the frame
using YOLO.
Estimate depth for the detected objects
using MiDaS.
Compute the spatial sound.
(see Section 3 and Section 5)
end
and depth information for the detected objects. The
iterative process continues until frame capture is com-
pleted.
3 SOUND MAPPING ROTATION
Based on the detected object, we propose an algo-
rithm that modifies a sound signal based on the ori-
entation of a 3D object, assuming the listener is sta-
tionary and continuously facing the object. The mo-
tivation behind this approach is to enhance spatial re-
alism in audio rendering by dynamically adapting the
sound based on the orientation of virtual objects. The
current approach is designed to work with standard
stereo MP3 aural sources. While limited to stereo for
now, future work will focus on extending the system
to support artificial multichannel formats such as 4.0
or 5.1, enabling richer and more immersive audio ex-
periences. As such, the algorithm accounts for the
angle between the object’s facing direction and the
listener’s position, and adjusts the signal accordingly
using a cardioid-based gain function and optional fil-
tering.
To model directional sound radiation, we apply a
cardioid gain function (Blauert, 1997):
g(θ) =
1 + cos(θ)
2
(1)
where:
• g(θ) represents the gain based on direction,
• θ ∈ [0, π] is the angle between the object’s for-
ward direction and the position of the listener, ex-
pressed in radians.
This function produces the highest gain when the
object is fully oriented toward the listener (θ = 0),
and the lowest gain when the object is turned away
(θ = π). This modulation can be interpreted as a
simplified spatial effect similar to the Doppler phe-
nomenon where a reduction in amplitude suggests
that the object is turning away. The gain value scales
the amplitude of the emitted sound as follows:
ˆs(t) = g(θ) · s(t) (2)
where:
• s(t) is the original sound signal produced by the
object,
• ˆs(t) is the resulting signal after gain adjustment,
as perceived by the listener.
To improve the sense of realism, particularly by
simulating the reduction of high-frequency content
due to acoustic obstruction, we apply an optional low-
pass filter. The cutoff frequency of this filter decreases
as the object rotates away from the listener. Also can
be used when object moves farther:
f
c
(θ) = f
max
− ( f
max
− f
min
) ·
θ
π
(3)
where:
Real-Time Sound Mapping of Object Rotation and Position in Augmented Reality Using Web Browser Technologies
41
• f
c
(θ) is the cutoff frequency of the filter based on
angle,
• f
max
is the highest cutoff frequency when the ob-
ject is directed toward the listener,
• f
min
is the lowest cutoff frequency when the object
faces away,
• θ is again the angle between the object’s main di-
rection and the position of the listener.
This algorithm provides a effective solution for
simulating rotational sound variation in AR environ-
ments – consult the Algorithm 2.
Algorithm 2: Rotation Based Audio Filter in
JavaScript.
Data: detectedAngle (in degrees), fMin,
fMax, soundAmplitude
Result: Computed gain, filtered amplitude,
and cutoff frequency
Convert angle to radians:
const thetaRad = detectedAngle *
(Math.PI / 180);
Define cardioid gain function:
function
computeCardioidGain(theta) {
return (1 + Math.cos(theta))
/ 2;
}
Define cutoff frequency function:
function
computeCutoffFrequency(theta,
fMin, fMax) {
return fMax - (fMax - fMin) *
(theta / Math.PI);
}
Compute gain:
const gain =
computeCardioidGain(thetaRad);
Apply gain to sound:
const filteredAmplitude = gain *
soundAmplitude;
Compute low-pass cutoff frequency:
const cutoffFrequency =
computeCutoffFrequency(thetaRad,
fMin, fMax);
Output gain, filteredAmplitude,
cutoffFrequency;
The computational complexity of Algorithm 2 is
also analyzed, which comprises a sequence of arith-
metic operations:
• Conversion of the angle from degrees to radians is
O(1).
• Computation of the cardioid-based gain function.
• Computation of the cutoff frequency for a low-
pass filter also a constant-time operation.
• Application of the gain to the input sound ampli-
tude a single multiplication, again O(1).
Since all steps use constant-time operations, the
overall time complexity for processing a single object
is:
T (n = 1) = O(1) (4)
4 DEPTH ESTIMATION
Depth estimation can be performed with different le-
vels of detail, from generating a full map of the scene
to analyzing only the area around a detected object.
To improve efficiency, we focus the depth calculation
within the boundaries of a selected region, allowing
the system to concentrate resources on the most rele-
vant part of the computed image.
Table 3: Frame processing times for YOLO object detection
and MiDaS depth estimation on a mobile device.
Frame
Number
Objects
Found
YOLO
Time (ms)
MiDaS
Time (ms)
1 1 62.35 113.52
2 1 64.10 115.88
3 1 60.78 111.94
4 1 63.56 114.25
5 1 61.90 112.80
6 1 65.00 116.30
To achieve this objective, we used MiDaS, a con-
volutional neural network trained on a diverse set of
depth estimation datasets (Birkl et al., 2023). The
model was first converted to the Open Neural Net-
work Exchange (ONNX) format
3
, which allows it to
run directly in a Web browser. This approach enables
the use of the client’s local CPU, eliminating the need
for a dedicated server for inference. After capturing
a frame, the image is processed by transforming the
pixel values into tensor representations that match the
input structure required by the MiDaS model.
To evaluate the computational performance of the
proposed pipeline, we provided in Table 3 a detailed
breakdown of frame inference times for both the ob-
ject detection and depth estimation components.
The YOLO model, responsible for real-time ob-
ject detection, consistently performs inference within
a range of approximately 60—65 milliseconds per
3
Open Neural Network Exchange – onnx.ai/onnx/
intro/ (Last accessed: July 29th, 2025).
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
42
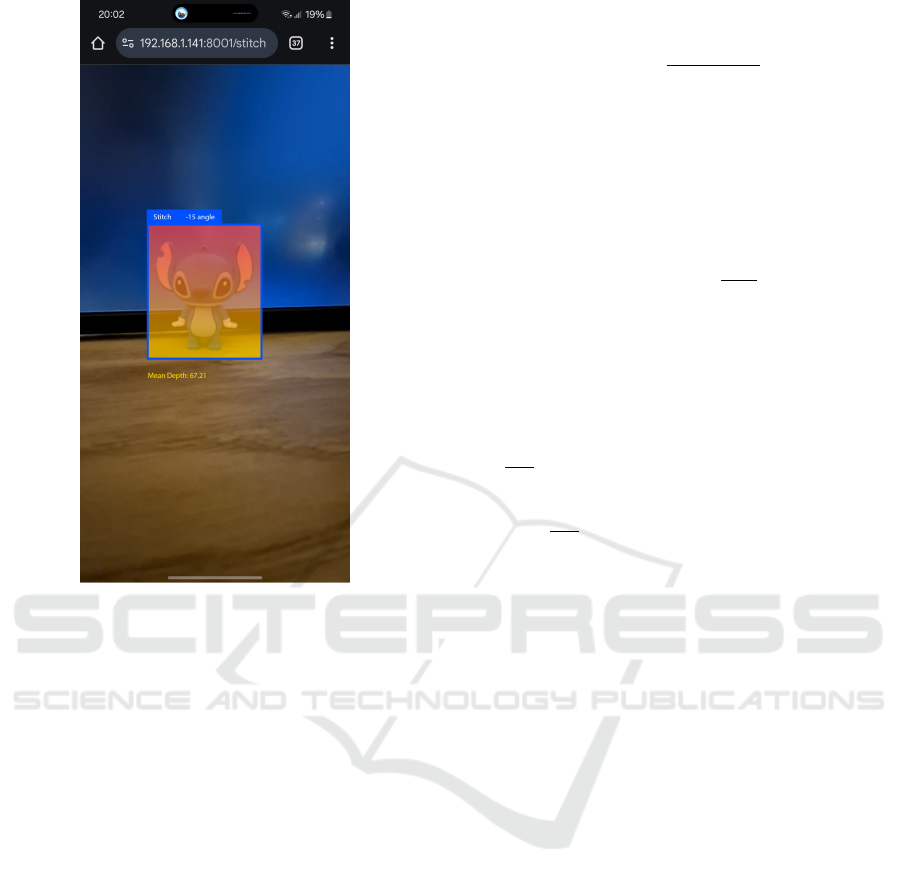
Figure 3: A video frame showing YOLO-detected objects
with labeled bounding boxes, depth heatmaps overlaying
the detections.
frame. In contrast, the MiDaS model, which esti-
mates dense depth information for the corresponding
frames, exhibits slightly higher latency, averaging be-
tween 111 and 116 milliseconds.
Despite this overhead, both models maintain re-
sponse times suitable for near real-time Web applica-
tions.
5 SOUND MAPPING
POSITIONING
To simulate spatial sound in AR environments, ac-
curate object positioning is essential. The goal is to
recreate how humans naturally perceive sound in the
real world where direction, distance, elevation, and
movement of sound sources all affect what we hear.
We use monocular depth estimation from the MiDaS
network (Ranftl et al., 2022) to infer 3D positions of
objects from 2D camera input. This estimation allows
us to derive the relative distance between the listener
and sound source, which in turn informs amplitude
attenuation and spatial filtering.
Assuming the listener remains at the origin L =
(0, 0, 0) in 3D space, and an object is detected at O =
(x, y, z), we compute the linear distance:
d =
p
x
2
+ y
2
+ z
2
(5)
We adopt a linear attenuation function capped
at a maximum perceptual distance d
max
according
to (Tsingos et al., 2004). This function gradually de-
creases the gain with distance but ensures a floor of
zero when d ≥ d
max
. It maintains clarity for nearby
sounds and reduces abrupt drop-offs:
g(d) = 1 − min
d
d
max
, 1
(6)
where:
• d is the distance between the sound-emitting ob-
ject and the listener,
• d
max
is the maximum perceptual distance beyond
which the sound is fully attenuated,
•
d
d
max
normalizes the actual distance into the range
[0, 1] relative to d
max
,
• min
d
d
max
, 1
ensures the normalized distance
does not exceed 1, preventing negative gain va-
lues,
• g(d) is the resulting gain, which decreases li-
nearly from 1 to 0 as the object moves from the
listener to the distance threshold.
This function behaves as follows:
• If d = 0, then g(d) = 1, then maximum volume.
• If 0 < d < d
max
, then g(d) decreases linearly.
• If d ≥ d
max
, then no audible output g(d) = 0.
The sound signal perceived by the listener be-
comes:
ˆs(t) = g(d) · s(t) (7)
where:
• s(t) is the original emitted signal,
• g(d) is the distance-based linear gain,
• ˆs(t) is the resulting signal as perceived by the lis-
tener.
The pseudo-code from Algorithm 3 outlines the
real-time computation of this gain.
This approach enables sound levels to respond to
the relative distance between objects and the listener
in real-time. It uses a scaling method that is both com-
putationally efficient and perceptually meaningful.
Also, we can analyze the time complexity of the
position-based audio attenuation algorithm. The pro-
cess of accessing values from the depth map and ex-
tracting 3D coordinates is assumed to take constant
Real-Time Sound Mapping of Object Rotation and Position in Augmented Reality Using Web Browser Technologies
43

Algorithm 3: Position Audio Attenuation Algo-
rithm.
Data: depthMap, soundAmplitude, dMax
Result: Computed gain and perceived
amplitude
Extract 3D position from MiDaS depth map:
const pos3D =
get3DCoordinates(depthMap);
Compute distance from listener:
const d = Math.sqrt(
Math.pow(pos3D.x, 2) +
Math.pow(pos3D.y, 2) +
Math.pow(pos3D.z, 2));
Compute linear attenuation gain:
const gain = 1 - Math.min(d /
dMax, 1);
Apply gain to original sound amplitude:
const perceivedAmplitude = gain *
soundAmplitude;
Output gain, perceivedAmplitude;
time, that is, O(1). In addition, mathematical func-
tions such as square root (sqrt), power (pow), and
minimum (min) are treated as basic operations with
constant time complexity.
Therefore, the overall time complexity of the al-
gorithm for a single object is:
T (n = 1) ≡ O(1) (8)
When the algorithm is applied to n individual ob-
jects, each one is processed separately. In this case,
the overall time complexity becomes:
T (n) ≡ O(n) (9)
This result confirms that the method is well suited
for use in real time environments where multiple
sound sources are present.
Table 4: Performance results of position audio attenuation
algorithm on an Android smartphone.
Frame
Num-
ber
Time
Taken
(ms)
Average
Attenua-
tion (dB)
Memory
Usage
(MB)
1 1 −3 2.0
2 1 −6 2.0
3 1 −10 2.0
4 1 −15 2.0
5 1 −18 2.0
Additionally, we conducted several tests using ac-
tual MP3 files. The performance results are summa-
rized in the Table 4 and illustrate the phone device’s
gradual movement away from the Stitch object, which
serves as the primary sound source.
Throughout this motion, both the processing time
and memory consumption exhibit a consistent pattern,
underscoring the algorithm’s noteworthy efficiency
and reliability.
6 RELATED WORK
Recent advances in AR have enabled increasingly so-
phisticated interactions between physical and digital
environments, particularly in the domain of audio-
visual alignment and spatial sound rendering. This
paper builds on prior work in spatial audio localiza-
tion and physical object tracking in AR.
Spatial sound reproduction in virtual and aug-
mented environments has been extensively studied.
Techniques such as binaural rendering allow simula-
tion of three dimensional sound fields with percep-
tually accurate directionality cues in the context of
conventional applications (Wenzel et al., 1993; Zotkin
et al., 2004) and Web (Fotopoulou et al., 2024).
Alternative approaches (Chelladurai et al., 2024)
(Wald et al., 2025) concentrate on spatial haptic feed-
back for accessible sounds in virtual reality envi-
ronments for individuals with hearing impairments.
Subsequent work has focused on improving per-
ceptual realism and reducing latency in rendering
pipelines (Vazquez-Alvarez et al., 2012; Hirway et al.,
2024), often within native (desktop or mobile) plat-
forms and/or proprietary audio engines. Although
these systems deliver high fidelity, they are not de-
signed for use in Web browser environments.
The WebXR group of standards enable access to
spatial sensors and camera input directly through the
Web browser. Applications created with WebXR offer
augmented experiences while avoiding the need for
native app installation, enhancing both accessibility
and portability (McArthur et al., 2021). Open source
tools like A-Frame demonstrate that augmented real-
ity in the browser is practical, although maintaining
smooth, responsive interaction continues to be a chal-
lenge.
The latest advancements in spatial audio render-
ing – exemplified by different works such as Sonify-
AR (Su et al., 2024), Auptimize (Cho et al., 2024),
and enhanced sound event localization and detection
in 360-degree soundscapes (Roman et al., 2024; San-
tini, 2024) – highlight the increasing sophistication
of this technology in extended and augmented reality
settings.
Also, various APIs provided by the modern (mo-
bile) Web browsers
4
(e.g., Web Audio API) allow for
4
The Web Platform: Browser technologies – html-now.
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
44

directional sound placement within browser environ-
ments. However, integration of these tools with dy-
namic object tracking from physical space is still lim-
ited. Early experimental systems demonstrate feasi-
bility in combining WebXR, Web Audio, and WASM
(Web Assembly) to synchronize object pose with
real-time sound field updates (Tomasetti et al., 2023)
(Boem et al., 2024).
These proposals point to promising directions, but
lack the performance guarantees and hardware com-
patibility required for widespread adoption.
7 CONCLUSION
Clearly, spatial audio is an important element in im-
mersive AR, allowing users to experience sound that
responds to real-world motion and location. This
work introduced a Web browser-based system for
converting the rotation and position of a real object
into spatial audio feedback within an AR setting.
By combining object tracking with three-
dimensional sound rendering, built using JavaScript,
we showed that interactive audio features can run
efficiently on modern Web platforms. Performance
tests on mobile Web browsers confirmed that the
system delivers low latency and smooth execution
with efficient audio processing.
To accomplish the research goals, we described
object tagging in Section 2, sound mapping for rota-
tion in Section 3. Also, depth estimation was detailed
in Section 4 and location mapping for position in Sec-
tion 5. Our obtained results confirm that responsive,
real-time audio interaction is achievable directly in
the Web browser without the need for external plug-
ins or native code.
Future studies will build on this foundation by in-
tegrating dynamic environmental soundscapes and in-
vestigating innovative approaches in perceptual audio
design (Schiller et al., 2024) (Batat, 2024). Draw-
ing inspiration from previous studies like (Bhowmik,
2024), (Munoz, 2025), and (Peng et al., 2025), we
also aim to incorporate richer physical object repre-
sentations and more diverse interaction modalities to
further extend the potential of the Web Audio API in
various virtual/augmented/mixed reality experiences.
In addition, another research perspective may fo-
cus on usability evaluation with blind participants to
validate system effectiveness in real contexts, and
exploration of HRTF (head-related transfer func-
tion) (Cheng and Wakefield, 2001) binaural audio to
enhance spatial perception.
github.io/ (Last accessed: July 29th, 2025).
REFERENCES
Batat, W. (2024). Phygital customer experience in the meta-
verse: A study of consumer sensory perception of
sight, touch, sound, scent, and taste. Journal of Re-
tailing and Consumer Services, 78:103786.
Bhowmik, A. K. (2024). Virtual and augmented reality: Hu-
man sensory-perceptual requirements and trends for
immersive spatial computing experiences. Journal of
the Society for Information Display, 32(8):605–646.
Birkl, R., Ranftl, R., and Koltun, V. (2023). Boost-
ing monocular depth estimation models to high-
resolution via content-aware upsampling. arXiv
preprint arXiv:2306.05423.
Blauert, J. (1997). Spatial hearing: The psychophysics of
human sound localization. MIT Press.
Boem, A., Dziwis, D., Tomasetti, M., Etezazi, S., and
Turchet, L. (2024). “It Takes Two”—Shared and Col-
laborative Virtual Musical Instruments in the Musi-
cal Metaverse. In 2024 IEEE 5th International Sym-
posium on the Internet of Sounds (IS2), pages 1–10.
IEEE.
Chelladurai, P. K., Li, Z., Weber, M., Oh, T., and Peiris,
R. L. (2024). SoundHapticVR: head-based spatial
haptic feedback for accessible sounds in virtual reality
for deaf and hard of hearing users. In Proceedings of
the 26th International ACM SIGACCESS Conference
on Computers and Accessibility, pages 1–17.
Cheng, C. I. and Wakefield, G. H. (2001). Introduction
to head-related transfer functions (hrtfs): Represen-
tations of hrtfs in time, frequency, and space. Journal
of the Audio Engineering Society, 49(4):231–249.
Cho, H., Wang, A., Kartik, D., Xie, E. L., Yan, Y., and
Lindlbauer, D. (2024). Auptimize: Optimal Place-
ment of Spatial Audio Cues for Extended Reality. In
Proceedings of the 37th Annual ACM Symposium on
User Interface Software and Technology, pages 1–14.
Fotopoulou, E., Sagnowski, K., Prebeck, K., Chakraborty,
M., Medicherla, S., and D
¨
ohla, S. (2024). Use-Cases
of the new 3GPP Immersive Voice and Audio Services
(IVAS) Codec and a Web Demo Implementation. In
2024 IEEE 5th International Symposium on the Inter-
net of Sounds (IS2), pages 1–6. IEEE.
Hirway, A., Qiao, Y., and Murray, N. (2024). A Quality of
Experience and Visual Attention Evaluation for 360
videos with non-spatial and spatial audio. ACM Trans-
actions on Multimedia Computing, Communications
and Applications, 20(9):1–20.
Matuszewski, B. and Rottier, O. (2023). The Web Au-
dio API as a standardized interface beyond Web
browsers. Journal of the Audio Engineering Society,
71(11):790–801.
McArthur, A., Van Tonder, C., Gaston-Bird, L., and Knight-
Hill, A. (2021). A survey of 3d audio through the
browser: practitioner perspectives. In 2021 Immer-
sive and 3D Audio: from Architecture to Automotive
(I3DA), pages 1–10. IEEE.
Montero, A., Zarraonandia, T., Diaz, P., and Aedo, I.
(2019). Designing and implementing interactive and
Real-Time Sound Mapping of Object Rotation and Position in Augmented Reality Using Web Browser Technologies
45

realistic augmented reality experiences. Universal Ac-
cess in the Information Society, 18:49–61.
Mozilla VR Team (2025). A-frame: A web framework for
building virtual reality experiences. https://aframe.io/.
Accessed: 2025-05-11.
Munoz, D. R. (2025). Soundholo: Sonically augmenting
everyday objects and the space around them. In Pro-
ceedings of the Nineteenth International Conference
on Tangible, Embedded, and Embodied Interaction,
pages 1–14.
Peng, X., Chen, K., Roman, I., Bello, J. P., Sun, Q., and
Chakravarthula, P. (2025). Perceptually-guided acous-
tic “foveation”. In 2025 IEEE Conference Virtual Re-
ality and 3D User Interfaces (VR), pages 450–460.
IEEE.
Ranftl, R., Bochkovskiy, A., and Koltun, V. (2022). To-
wards robust monocular depth estimation: Mixing
datasets for zero-shot cross-dataset transfer. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence.
Roman, A. S., Balamurugan, B., and Pothuganti, R. (2024).
Enhanced sound event localization and detection in
real 360-degree audio-visual soundscapes. arXiv
preprint arXiv:2401.17129.
Santini, G. (2024). A case study in xr live performance. In
International Conference on Extended Reality, pages
286–300. Springer.
Schiller, I. S., Breuer, C., Asp
¨
ock, L., Ehret, J., B
¨
onsch, A.,
Kuhlen, T. W., Fels, J., and Schlittmeier, S. J. (2024).
A lecturer’s voice quality and its effect on memory,
listening effort, and perception in a vr environment.
Scientific Reports, 14(1):12407.
Smilkov, D., Thorat, N., Assogba, Y., Nicholson, C.,
Kreeger, N., Yu, P., Cai, S., Nielsen, E., Soegel, D.,
Bileschi, S., et al. (2019). Tensorflow.js: Machine
learning for the Web and beyond. Proceedings of Ma-
chine Learning and Systems, 1:309–321.
Sodnik, J., Tomazic, S., Grasset, R., Duenser, A., and
Billinghurst, M. (2006). Spatial sound localization
in an augmented reality environment. In Proceedings
of the 18th Australia conference on computer-human
interaction: design: activities, artefacts and environ-
ments, pages 111–118.
Su, X., Froehlich, J. E., Koh, E., and Xiao, C. (2024).
SonifyAR: Context-Aware Sound Generation in Aug-
mented Reality. In Proceedings of the 37th An-
nual ACM Symposium on User Interface Software and
Technology, pages 1–13.
Tomasetti, M., Boem, A., and Turchet, L. (2023). How to
Spatial Audio with the WebXR API: a comparison of
the tools and techniques for creating immersive sonic
experiences on the browser. In 2023 Immersive and
3D Audio: from Architecture to Automotive (I3DA),
pages 1–9. IEEE.
Tsingos, N., Carlbom, I., Elko, G., Funkhouser, T., and
Pelzer, S. (2004). Validating auralization of archi-
tectural spaces using visual simulation and acoustic
measurements. In IEEE Virtual Reality 2004, pages
28–36. IEEE.
Vazquez-Alvarez, Y., Oakley, I., and Brewster, S. A. (2012).
Auditory display design for exploration in mobile
audio-augmented reality. Personal and Ubiquitous
computing, 16:987–999.
Wald, I. Y., Degraen
*
, D., Maimon
*
, A., Keppel, J.,
Schneegass, S., and Malaka, R. (2025). Spatial Hap-
tics: A Sensory Substitution Method for Distal Object
Detection Using Tactile Cues. In Proceedings of the
2025 CHI Conference on Human Factors in Comput-
ing Systems, pages 1–12.
Walt Disney Animation Studios (2002). Lilo & stitch. Di-
rected by Dean DeBlois and Chris Sanders.
Wenzel, E. M., Arruda, M., Kistler, D. J., and Wightman,
F. L. (1993). Localization using nonindividualized
head-related transfer functions. The Journal of the
Acoustical Society of America, 94(1):111–123.
Zotkin, D. N., Duraiswami, R., and Davis, L. S. (2004).
Rendering localized spatial audio in a virtual auditory
space. IEEE Transactions on multimedia, 6(4):553–
564.
WEBIST 2025 - 21st International Conference on Web Information Systems and Technologies
46
