
A Scalable Robot-Agnostic Voice Control Framework for Multi-Robot
Systems
Valentina Pericu
a
, Federico Rollo
b
and Navvab Kashiri
c
Robotics, Innovation Labs, Leonardo S.p.A., Genoa, Italy
Keywords:
Multi-Robot Systems, Robot-Agnostic, Scalability, Voice Control.
Abstract:
In recent years, Multi-Robot Systems (MRS) have gained increasing relevance in domains such as industrial
automation, healthcare, and disaster response, offering effective solutions to manage complex and dynamic
tasks. However, controlling such systems remains a challenge, particularly for users without expertise in
robotics. A critical factor in addressing this challenge is developing intuitive and accessible Human-Robot
Interaction (HRI) mechanisms that enable seamless communication between humans and robots. This paper
introduces a scalable, robot-agnostic voice control framework designed to simplify interaction with MRS. The
framework enables users to issue voice commands that are processed into actionable, robot-specific instruc-
tions through a centralized architecture. At its core, the framework features a centralized Control Management
System (CMS) that is responsible for processing voice commands and interpreting them into robot-agnostic
actions. System scalability is achieved through namespace management and a flexible structure, allowing new
robots to be integrated and larger teams to be accommodated with minimal effort. By minimizing hardware
requirements and leveraging voice commands as the primary interaction modality, the framework reduces tech-
nical barriers and provides an accessible, cost-effective solution for non-expert users. Experimental validation
demonstrates its flexibility, scalability, and effectiveness in multi-robot scenarios. This work contributes to
advancing HRI by offering a robust, intuitive, and adaptable solution for managing heterogeneous robot teams
across dynamic environments.
1 INTRODUCTION
Human-Robot Interaction (HRI) serves as the funda-
mental bridge between human intent and robotic ac-
tions, enabling robots to perform tasks that align with
human requirements and expectations. As robots be-
come increasingly integrated into human-centric en-
vironments, HRI has emerged as a crucial area of re-
search, aiming to develop intuitive, accessible, and
efficient interaction methods that enhance usability
and acceptance. The rapid growth of the Internet of
Things (IoT) has further accelerated the integration of
robots into everyday life, expanding the need for ef-
fective communication between humans and robotic
systems (Su et al., 2023).
This need becomes particularly critical in Multi-
Robot Systems (MRS), where the challenge of co-
ordinating heterogeneous robotic devices requires in-
teraction methods that are not only natural but also
a
https://orcid.org/0009-0000-4661-8293
b
https://orcid.org/0000-0001-5833-5506
c
https://orcid.org/0000-0002-1219-2447
scalable and efficient, ensuring effective collabora-
tion in complex and dynamic environments (Dahiya
et al., 2023). MRS have revolutionized numerous
fields such as disaster response, industrial automation,
and healthcare by leveraging various robotic capabil-
ities to address tasks that are beyond the scope of in-
dividual robots (Dahiya et al., 2023; Rizk et al., 2019;
Stone and Veloso, 2000). The ability of MRS to dy-
namically distribute tasks based on individual robot
capabilities further enhances their applicability in ad-
dressing real-world challenges, as demonstrated by
Heppner et al. (Heppner et al., 2024), which present
a decentralized approach using behaviour trees to dy-
namically allocate tasks based on robots’ capabilities,
leveraging runtime auctions for optimal assignments.
Many studies have explored different HRI modal-
ities to facilitate effective interaction between humans
and robots. Hang Su et al. (Su et al., 2023) re-
view recent advances in multi-modal HRI, emphasiz-
ing the strengths and limitations of different interac-
tion styles. The review highlights that existing HRI
methods span multiple modalities, including audio-
194
Pericu, V., Rollo, F. and Kashiri, N.
A Scalable Robot-Agnostic Voice Control Framework for Multi-Robot Systems.
DOI: 10.5220/0013672500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 194-201
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

based, visual, tactile, and multi-modal approaches,
each with distinct advantages and drawbacks. Audio-
based interaction offers intuitive and hands-free com-
munication; however, it struggles with ambient noise,
ambiguous phrases, and variations in dialect, and it
can be sensitive to the distance between speaker and
receiver (Marin Vargas et al., 2021; Kumatani et al.,
2012). Visual interaction, employing gestures and fa-
cial expression recognition, provides rich contextual
information. Nevertheless, it is sensitive to environ-
mental factors such as lighting and occlusions (Rollo
et al., 2023b; Rollo et al., 2024b), and requires the ap-
propriate installation of cameras and/or other visual
sensors. Similarly, haptic interaction enhances intu-
itiveness through touch-based feedback (Pyo et al.,
2021), which requires high precision and reliable sen-
sors, as well as the corresponding control algorithms
to ensure safe and effective interactions. Moreover,
both cameras and haptic sensors require the proxim-
ity of the user to the robot, which is not always desir-
able in terms of safety and usability in MRS. Multi-
modal systems aim to integrate these approaches to
replicate human-like communication by combining
their strengths (Muratore et al., 2023). However,
their hardware requirements and integration complex-
ity further limit their practicality, particularly in het-
erogeneous robot systems.
The growing interest in verbal communication
within both industry and academia reflects its poten-
tial to enable more natural and intuitive interactions
between humans and robots, as noted by Marin et al.
(Marin Vargas et al., 2021). This communication ap-
proach offers significant advantages in various fields,
including industrial applications (Papavasileiou et al.,
2024) (Del Bianco et al., 2024), medical robotics (Ro-
gowski, 2022), assistive technologies (Padmanabha
et al., 2024), and education-focused robotics (Budi-
harto et al., 2017; Belpaeme et al., 2018). Verbal
communication stands out by simplifying the inter-
action between advanced technological systems and
individuals with limited technical knowledge, mak-
ing it more accessible and user-friendly. Moreover,
voice control offers several advantages over other
interaction modalities, as it allows users to interact
freely without being constrained by the field-of-view
or proximity requirements of visual or tactile systems.
Recent advances in speech recognition and natural
language processing (Su et al., 2023; Amadio et al.,
2024) have further improved the reliability and prac-
ticality of voice-based systems, making them well-
suited for real-world applications.
The need for a scalable, robot-agnostic interaction
framework for MRS has drawn significant attention to
this field, aiming to minimize hardware dependencies
while ensuring simplicity and accessibility. Carr et
al. (Carr et al., 2023) propose a human-friendly ver-
bal communication platform for MRS, which elimi-
nates the dependency on network infrastructures by
enabling robots to communicate between themselves
through microphones and speakers. However, this
approach relies on the availability of onboard audio
hardware, which can be challenging to exploit in mo-
bile robots such as drones and/or quadrupeds due to
the potential interference from operational noise.
To overcome these limitations, this work pro-
poses a centralized framework for voice control with
hardware-minimal and robot-agnostic characteristics.
Unlike visual or tactile interaction modalities that re-
quire specialized hardware, such as cameras or hap-
tic sensors on each robot, adding complexity, cost,
and reducing compatibility, this approach central-
izes command processing within a Control Man-
agement System (CMS). Relying solely on a sin-
gle microphone, the CMS eliminates the need for
additional sensors or hardware modifications on the
robots, enabling straightforward integration with di-
verse robotic platforms. The CMS translates voice
commands into robot-agnostic instructions, ensuring
adaptability across heterogeneous robot teams.
Moreover, the CMS features a capability-aware
mechanism that ensures voice commands are directed
only to robots capable of executing the requested
tasks. This capability-handling feature improves re-
liability by filtering out invalid commands, enhanc-
ing the system’s efficiency in managing diverse robot
teams, and ensuring effective operation in heteroge-
neous multi-robot environments.
The following Section 2 outlines the methods,
providing a detailed explanation of the proposed sys-
tem architecture, with an emphasis on the CMS mod-
ules. Section 3 presents the experimental setup, de-
scribes two use case experiments, and discusses the
obtained results to illustrate the system’s functional-
ity. Finally, Section 4 concludes the paper by sum-
marizing key findings and suggesting directions for
future work.
2 METHODS
This work focuses on developing a hardware-
minimal, robot-agnostic, scalable approach leverag-
ing voice control. Robot-agnostic refers to a sys-
tem design that operates independently of the spe-
cific hardware or internal architecture of individ-
ual robots. Instead, it relies on generic interfaces
and a shared communication protocol, allowing the
same interaction and processing logic to be applied
A Scalable Robot-Agnostic Voice Control Framework for Multi-Robot Systems
195
seamlessly across heterogeneous platforms such as
wheeled robots, quadrupeds, and drones. This section
details the architecture and core functionalities of the
framework.
2.1 System Overview
WIFI
ROUTER
StT CH
ROS2 network
Zenoh bridge
CMS
Zenoh bridge
ROS2 network
ROBOT 1
Zenoh bridge
ROS2 network
ROBOT 2
Zenoh bridge
ROS2 network
ROBOT n
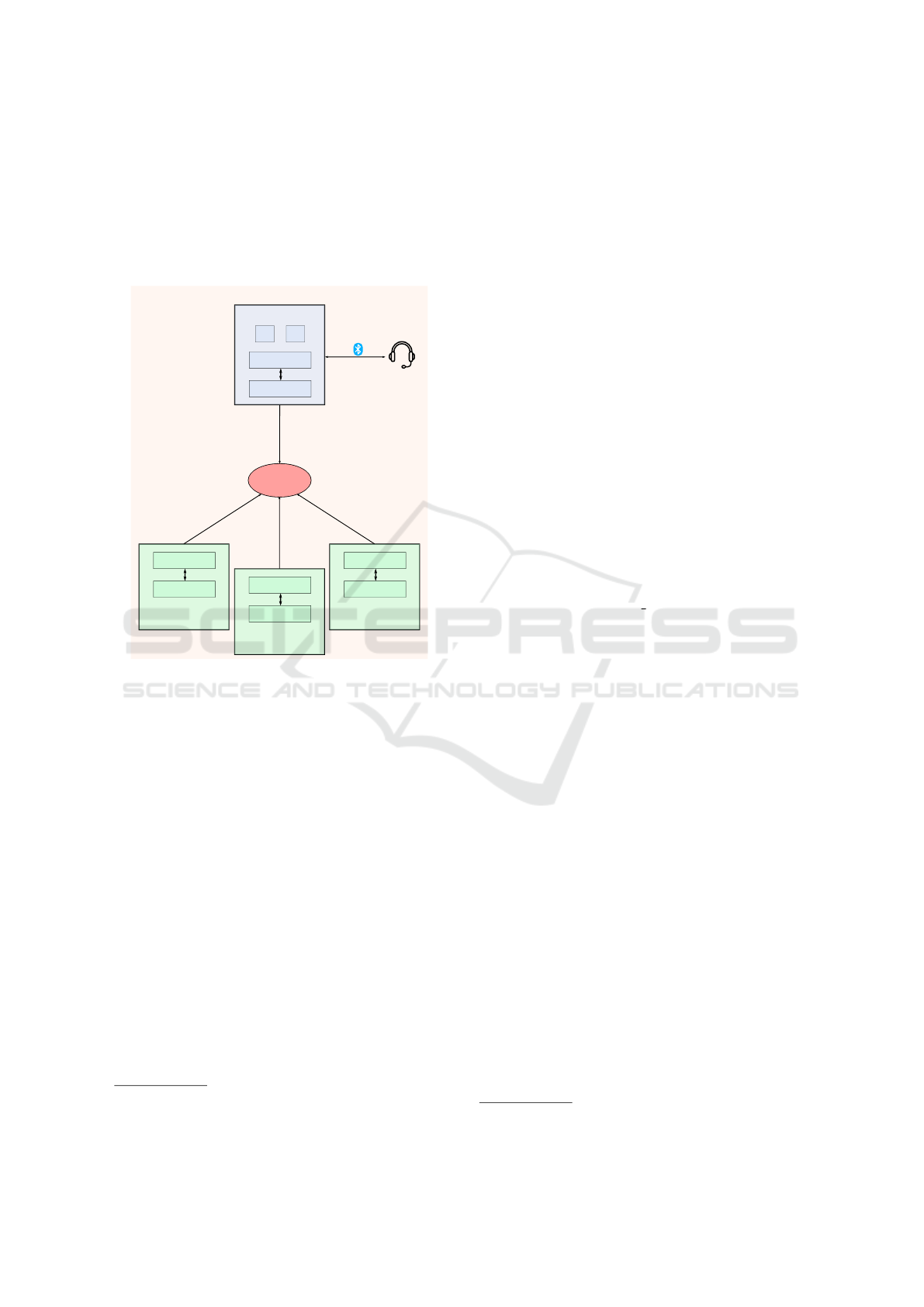
Figure 1: The system architecture of the voice control
framework for MRS. The CMS runs the StT and CH, and
also acts as a Zenoh router, connecting to Zenoh clients on
each robot via a centralized Wi-Fi network. ROS2 manages
internal operations on the CMS and robots, while Zenoh
bridges communication between them.
Figure 1 illustrates the architecture of the scalable
robot-agnostic voice control framework. The frame-
work exploits the Robot Operating System 2 (ROS2)
middleware, version Humble
1
, and the Zenoh proto-
col
2
. ROS2 is a set of software libraries and tools
for building robot applications, relying on DDS as its
communication middleware. Zenoh acts as a bridge
for ROS2, enabling efficient data exchange across
networks by mirroring DDS topics, reducing com-
munication overhead in distributed or wireless envi-
ronments. Additionally, Zenoh simplifies topic di-
versification by allowing flexible namespace manage-
ment, which facilitates the integration of MRS. As
indicated in the figure, the voice command process-
ing is carried out within the CMS as a centralized
unit, to allow for a simple and hardware-minimal so-
lution, relying only on a single microphone connected
1
https://docs.ros.org/en/humble/index.html
2
https://zenoh.io/
to the CMS unit. The system is built on a Wi-Fi net-
work, enabling inter-system connectivity through Wi-
Fi routers. In this setup, the CMS operates as a Zenoh
router, while each robot functions as a Zenoh client.
These components are interconnected and mutually
visible. This shared network ensures direct and ef-
ficient communication, eliminating the need for inter-
mediate configurations or additional networking in-
frastructure. The CMS manages human-to-robot in-
teraction through two core modules: the Speech-to-
Text (StT) module, which processes voice commands,
and the Command Handler (CH) module, which in-
terprets and dispatches commands to the appropriate
robots in a robot-agnostic and scalable manner, al-
lowing the integration of new robots with minimal re-
configuration. These modules operate independently,
promoting modularity and adaptability within the sys-
tem. Their specific roles and functionalities are de-
tailed in the following subsections.
2.2 Speech-to-Text Module
The StT module converts verbal commands into tex-
tual commands and publishes them on ROS2. This
module is implemented as a ROS2 node that ex-
ploits the Python speech
recognition library
3
for
speech-to-text conversion. To enhance usability and
robustness in noisy environments, the node dynami-
cally adjusts for ambient noise by analyzing the en-
vironment to distinguish background sounds from ac-
tual speech before processing. This ensures reliable
transcription even in environments with varying noise
levels, improving the accuracy of recognized com-
mands.
A Bluetooth microphone connected to the pilot PC
further reduces interference and enables remote voice
input, offering greater user mobility, especially bene-
ficial in collaborative or vision-based tasks.
2.3 Command Handler Module
The CH module is implemented as a ROS2 node that
listens to commands provided by the StT module.
Upon receiving a command, it performs parsing and
validation. The handler relies on predefined lists of
robots names, actions, and action-specific informa-
tion to ensure the commands are valid. Commands
must follow the format ”robot name” + ”action” +
”info”; where ”info” is optional, depending on the
action type. The robot name is used to specify the
target robot for the action and is incorporated as a
namespace in ROS2 to route commands to the ap-
propriate robot. If a command is invalid, an error is
3
https://pypi.org/project/SpeechRecognition/
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
196

logged, and no action is performed. Valid commands
are transformed into robot-specific actions and pub-
lished to the ROS2 topic with the appropriate robot
namespace. For example, the command ”robot1 ro-
tate left” is converted by the CH into a Twist mes-
sage and published on the /robot1/cmd vel topic. A
key strength of the CH lies in its scalability, enabled
by namespace management through Zenoh. Integrat-
ing additional robots into the system simply requires
assigning unique namespaces to each robot and up-
dating the predefined robots names list, making the
system adaptable to larger teams without significant
reconfiguration. Similarly, additional actions can be
easily integrated by expanding the list of supported
commands, ensuring the framework remains flexible
and extensible to evolving operational requirements.
2.3.1 Robot States and Capabilities
The CH module also monitors the states and capabil-
ities associated with each robot:
• Robot States: each robot is associated with
two boolean state indicators: is active and
is in action. The is active state indicates
whether the specified robot is turned on and con-
nected to the Wi-Fi router, as verified by a keep-
alive check performed every second. This en-
sures that commands are processed only for ac-
tive robots, while those targeting inactive robots
are discarded. The is in action state tracks
whether the robot is currently executing a given
action, supporting effective task management and
safe handling of stop commands. Together, these
states are crucial for coordinating robots in dy-
namic environments and preventing unintended
actions.
• Robot Capabilities: Robot capabilities are pre-
defined for each robot, representing its functional
abilities. This enables the system to automatically
reject commands that exceed a robot’s function-
ality. For instance, a quadruped robot can execute
actions like ”stand-up” and ”sit-down”, while
a wheeled robot can’t, as they fall outside its
operational scope. This approach is particularly
beneficial in heterogeneous multi-robot setups,
such as those involving quadrupeds, wheeled
robots, drones, and manipulators, as it allows the
system to manage diverse robots seamlessly.
2.3.2 Implemented Actions
The CH module supports a range of actions for each
robot, to be triggered by specific voice commands:
• Exploration: triggered by the command ”ex-
plore”, this action does not require any additional
information; however, it can potentially accept ad-
ditional information for inspecting the environ-
ment, i.e. ”explore and inspect”. The CH inter-
prets the command and instructs the robot to initi-
ate an exploration routine, enabling it to map the
surrounding environment.
• Rotation: this action is initiated with the com-
mand ”rotate” and requires additional informa-
tion, i.e ”left”/”right”. The CH processes the
command and sends the appropriate instruction to
the robot, enabling it to rotate in the indicated di-
rection.
• Translation: the action is activated by the com-
mand ”move” and also requires additional infor-
mation, i.e ”forward”/”backward”. The CH han-
dles the command and directs the robot to move
in the specified direction.
• Navigation to Goal: triggered by the instruction
”go to”, the action requires additional informa-
tion specifying the name associated with the tar-
get position. The target position and the corre-
sponding names may be available a priori, or can
be constructed within the ”explore” action, e.g.
”robot1 go to desk”. The CH processes the com-
mand and provides the robot with the navigation
instructions necessary to autonomously reach the
destination.
• Stop: the command ”stop” halts all ongoing ac-
tions of the specified robot. This action does not
require additional input, and the CH ensures that
the robot immediately stops its current tasks.
• Standing and Sitting: triggered by the commands
”stand up” and ”sit down”, respectively, these ac-
tions require no additional information. The CH
invokes the appropriate service to execute the ac-
tion for the specified robot, provided that the robot
supports the requested functionality.
3 EXPERIMENTS
To validate the proposed framework, we conducted a
set of real-world experiments involving two heteroge-
neous robots. Section 3.1 presents the experimen-
tal setup used to test how the system can interpret
and execute voice commands across multiple robots.
Section 3.2 describes two representative experiments,
chosen from the broader set performed. In the valid
sample experiment, presented in Section 3.2.1, all
voice commands were correctly executed, targeting
A Scalable Robot-Agnostic Voice Control Framework for Multi-Robot Systems
197
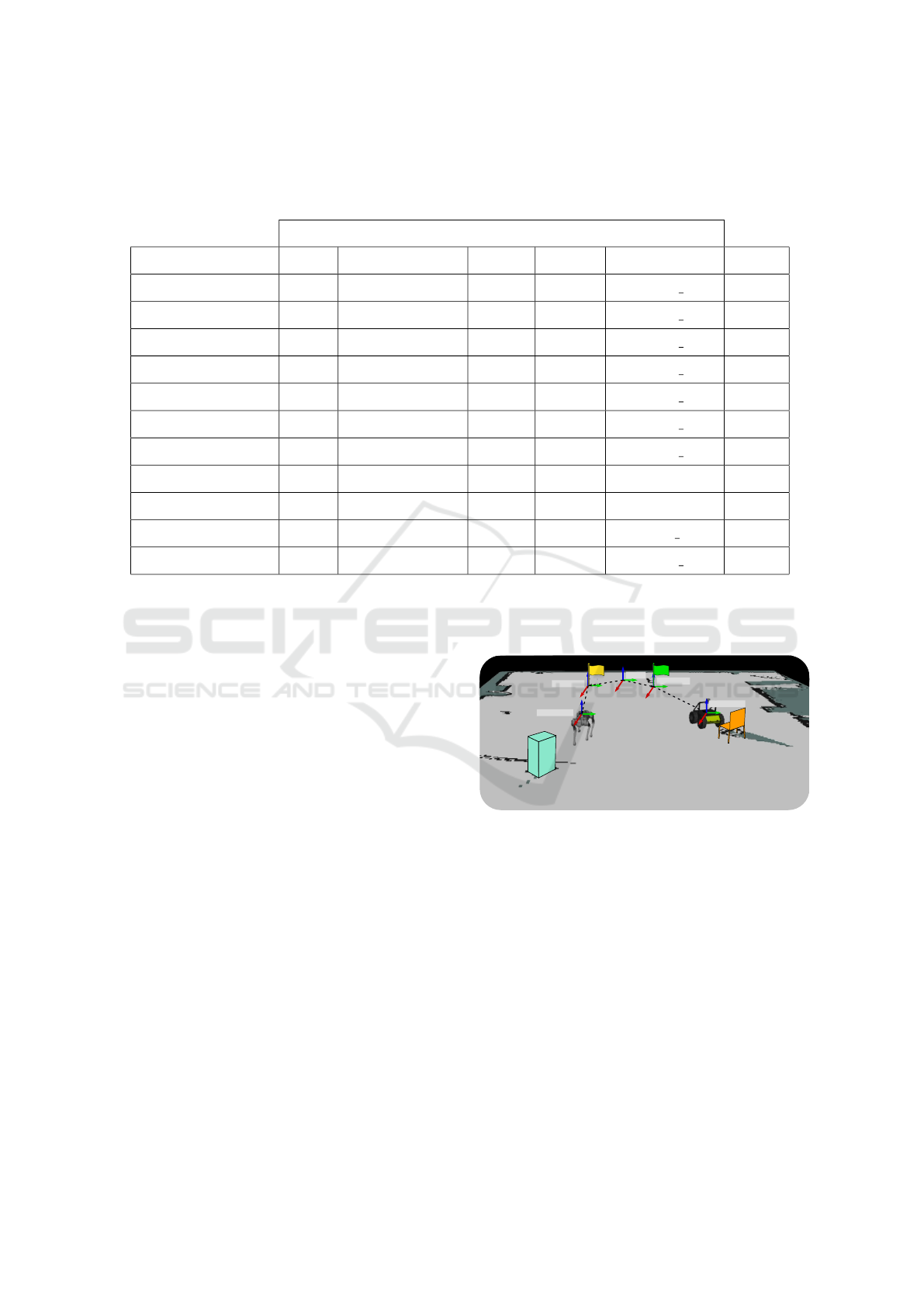
Table 1: Detailed breakdown of the command handling pipeline, from speech recognition to execution, across valid and
invalid scenarios. The table shows how voice commands are processed, validated, and dispatched to heterogeneous robots,
detailing the StT output, target robot, requested action, optional information, feasibility check, generated ROS 2 topic/service,
and execution result.
CH
StT Robot Action Info Validity Topic/Service Result
”Max explore” Max exploration - valid max/cmd vel success
”Max go to home” Max navigation to goal home valid max/goal pose success
”Bob go to chair” Bob navigation to goal chair valid bob/goal pose success
”Max go to box” Max navigation to goal box valid max/goal pose success
”Max go to home” Max navigation to goal home valid bob/goal pose success
”Bob go to home” Bob navigation to goal home valid bob/goal pose success
”Max go to chair” Max navigation to goal chair valid max/goal pose success
”Bob stand up” Bob standing - invalid - success
”Rob move forward” Rob translation forward invalid - success
”Max sit down” Max sitting - valid max/sit down success
”Bob rotate left” Bob rotation left valid bob/cmd vel success
active robots and requiring them to perform actions
within their capabilities. In the second sample ex-
periment, described in Section 3.2.2, we intention-
ally issued invalid commands, some directed at in-
active robots, and others requesting actions that the
robots do not support. Finally, Sections 3.3 and 3.4
present the results and discussion, further analyzing
the framework’s scalability and robustness.
3.1 Experimental Setup
The experiments involve two robots operating within
a shared environment: the Unitree B1 quadruped
robot, called Max, and the Clearpath Husky wheeled
robot, called Bob, both equipped with 16-channel 3D
LiDAR sensors. The robots utilize SLAM (Simulta-
neous Localization and Mapping) to create a detailed
map of their surroundings. RViz, a ROS visualization
tool, is used to visualize the environment, the robots’
states, and to provide real-time feedback on their po-
sitions, paths, and actions, facilitating efficient moni-
toring of their operations.
Figure 2 shows the RViz visualization used dur-
ing the experiments. A box and a chair represent the
robot’s target locations, while yellow and green flags
indicate the home positions of Max and Bob, respec-
tively. The grey area represents the constructed map
of the environment. To enable a common reference
frame, a transformation was established between the
shared earth frame and the individual maps of each
robot. The relationships between frames are illus-
trated in Figure 2.
max/map
max/odom
bob/map
earth
bob/odom
Figure 2: The RViz visualization of the experimental setup
illustrates the environment where two robots, Max and Bob,
operate. Their corresponding home positions are indicated
by yellow and green flags, respectively. The target positions
of the two robots, the box in cyan and the chair in orange,
are highlighted. The visualization also shows the relation-
ships between frames, including the shared earth frame as
well as the individual map and odometry frames of each
robot.
3.2 Experiments
Multiple experiments were conducted to evaluate the
system under various conditions. Two illustrative ex-
periments are presented below.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
198
Max explore
Max go to home
Bob go to chair
Max go to box
Both go to home
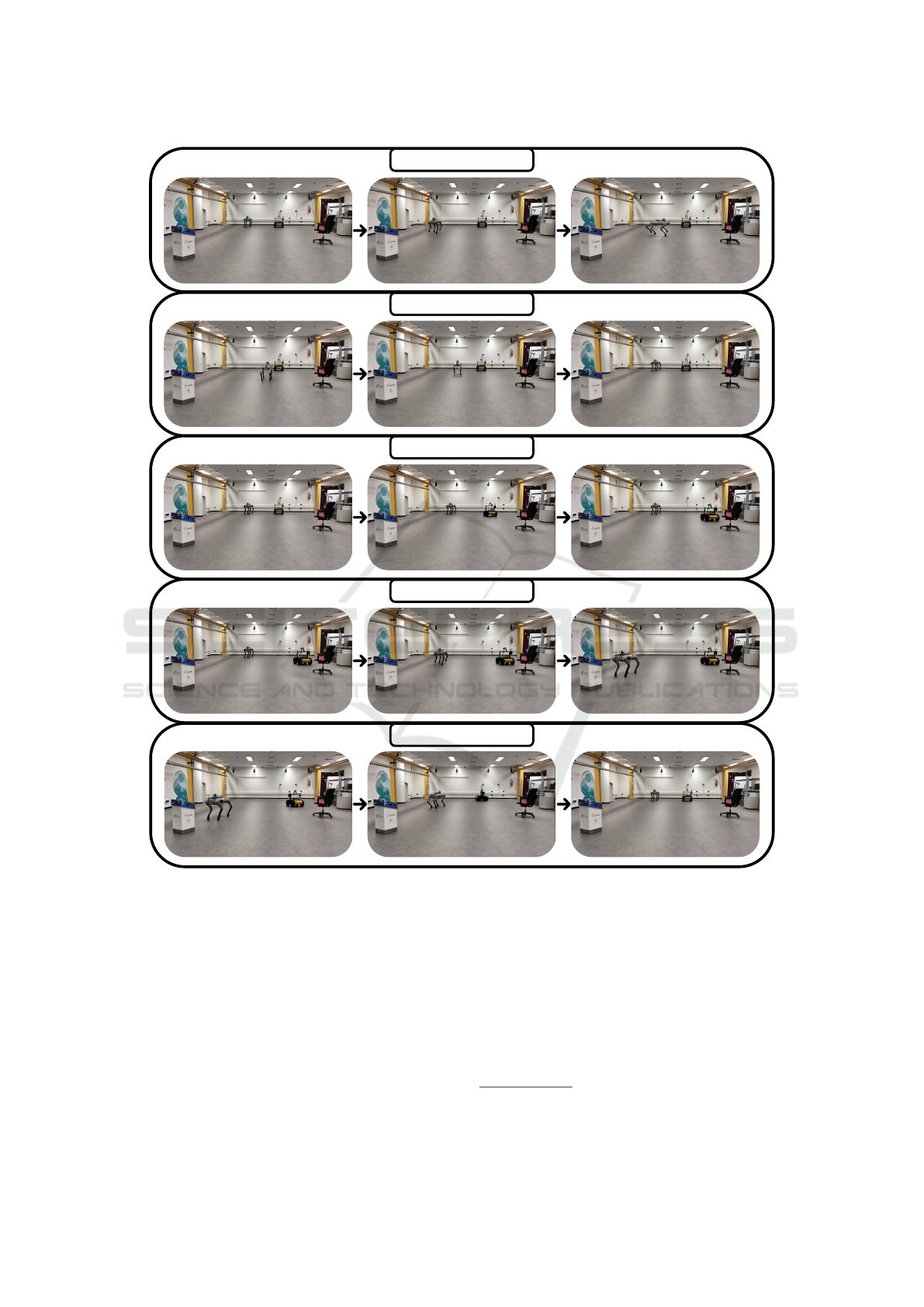
Figure 3: Sequence of actions performed during Experiment 1 (3.2.1) involving the two heterogeneous robots, Max and Bob.
The figure illustrates key moments as the robots execute voice commands, showcasing the system’s ability to manage multiple
robots and diverse tasks within a shared environment.
3.2.1 Experiment 1: Valid Commands
In the first experiment, we evaluated the system’s abil-
ity to process valid voice commands targeting active
robots and requesting actions within their capabilities.
The sequence of commands was as follows:
• ”Max explore”: Max starts an exploration routine
and builds the map of the environment;
• ”Max go to home”: Max navigates to its home;
• ”Bob go to chair”: Bob navigates to the chair;
• ”Max go to box”: Max navigates to the box;
• ”Max go to home”: Max navigates to its home;
• ”Bob go to home”: Bob navigates to its home;
Figure 3 captures key moments from this exper-
iment
4
. During the experiment, all voice commands
4
A video demonstrating this experiment can be found
at: https://youtu.be/Be6-bKC970M
A Scalable Robot-Agnostic Voice Control Framework for Multi-Robot Systems
199

were successfully processed and forwarded to the cor-
responding target robots. The robots correctly carried
out the requested actions, operating within the shared
environment without interruptions.
3.2.2 Experiment 2: Invalid Commands
The second experiment tested the system’s handling
of invalid inputs. Voice commands were intentionally
issued to inactive robots or involved actions not sup-
ported by the robot. The sequence included:
• ”Max go to chair”: Max navigates to the chair;
• ”Bob stand up”: the command is refused since
the ”stand-up” ability does not belong to the
wheeled robot;
• ”Rob move forward”: the command is refused
since Rob is not an active robot;
• ”Max sit down”: Max sits down;
• ”Bob rotate left”: Bob performs a leftward rota-
tion;
These outcomes confirm the effectiveness of robot
availability and capability validation mechanisms.
3.3 Results
The proposed framework was validated through
voice-controlled experiments involving two hetero-
geneous robots operating in a shared environment.
Voice commands were issued via a Bluetooth micro-
phone under realistic conditions, and their execution
was monitored to evaluate system performance. Ta-
ble 1 provides a detailed summary of the commands
processed by the system during Experiment 1 (Sec-
tion 3.2.1) and Experiment 2 (Section 3.2.2), includ-
ing the output of the StT module, the target robot,
the action type, the optional information, the feasi-
bility validation, the ROS2 topic/service generation,
and the execution results. Although multiple experi-
ments were conducted, only these two are reported in
the table for clarity and representativeness.
The CH consistently parsed each command, veri-
fied its feasibility by checking robot availability and
capability, and routed it to the appropriate ROS2 topic
or service via Zenoh. All valid commands were suc-
cessfully executed. For example, the command ”Max
sit down” was correctly interpreted and dispatched, as
the quadruped robot supports this capability. In con-
trast, commands that were syntactically incorrect, tar-
geted undefined or inactive robots (e.g., ”Rob move
forward”), or requested unsupported actions (e.g.,
”Bob stand up”) were successfully rejected.
Throughout the experiments, the system demon-
strated stable and repeatable behavior. No execution
failures were observed, and latency between voice in-
put and robot action remained consistently low, well
under two seconds. These results confirm the frame-
work’s effectiveness in handling both valid and in-
valid input and its robustness in coordinating task ex-
ecution within a heterogeneous multi-robot setup.
3.4 Discussion
The experiments highlight the framework’s effec-
tiveness in simplifying HRI for MRS. The central-
ized architecture and hardware-minimal design en-
sure adaptability across heterogeneous robot teams
and ensure ease of deployment and scalability. The
voice control modality removes the need for addi-
tional sensors on individual robots, reducing costs
and complexity while enabling intuitive interaction
for non-expert operators. The framework’s ability
to interpret and execute voice commands accurately
highlights its robustness and practicality in real-world
applications. The framework’s flexibility is evident in
its capacity to accommodate additional robots and dy-
namic task sequencing, addressing the challenges of
managing diverse robot teams in shared operational
environments.
Nevertheless, the current reliance on predefined
voice commands limits the naturalness and adaptabil-
ity, potentially reducing effectiveness in more com-
plex or unstructured scenarios. Advancing towards
natural language understanding techniques would en-
hance user experience and make the system more
adaptable to a larger range of operators and contexts.
Although the system currently uses inter-robot
communication infrastructure, it has not yet been
fully leveraged to facilitate direct data sharing among
robots. Enabling this functionality could allow the
exchange of maps, environmental data, and task
progress, thereby enhancing collaboration and en-
abling decentralized coordination. These improve-
ments would significantly boost operational effi-
ciency and the scalability of the system.
4 CONCLUSION
This paper introduces a scalable robot-agnostic voice
control framework for MRS, offering an accessible
hardware-minimal solution for HRI. By centraliz-
ing command processing and filtering tasks based
on robot capabilities, the system improves efficiency
while maintaining robustness across heterogeneous
teams. The experimental results confirm the frame-
work’s practicality and highlight its potential for de-
ployment in dynamic, real-world scenarios.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
200

To address current limitations, including the re-
liance on predefined voice commands and the lack
of environmental awareness, future work will focus
on integrating semantic mapping frameworks (Rollo
et al., 2023a) to enable contextual understanding
and support advanced loco-manipulation skills (Rollo
et al., 2024a). In addition, incorporating natural lan-
guage understanding techniques is expected to en-
hance communication flexibility and user intuitive-
ness. These developments aim to evolve the frame-
work into a more scalable, autonomous, and compre-
hensive HRI solution for multi-robot collaboration in
complex and dynamic environments.
REFERENCES
Amadio, F., Donoso, C., Totsila, D., Lorenzo, R., Rouxel,
Q., Rochel, O., Hoffman, E. M., Mouret, J.-B., and
Ivaldi, S. (2024). From vocal instructions to house-
hold tasks: The inria tiago++ in the eurobin service
robots coopetition. arXiv preprint arXiv:2412.17861.
Belpaeme, T., Vogt, P., Van den Berghe, R., Bergmann,
K., G
¨
oksun, T., De Haas, M., Kanero, J., Kennedy,
J., K
¨
untay, A. C., Oudgenoeg-Paz, O., et al. (2018).
Guidelines for designing social robots as second lan-
guage tutors. International Journal of Social Robotics,
10:325–341.
Budiharto, W., Cahyani, A. D., Rumondor, P. C., and
Suhartono, D. (2017). Edurobot: intelligent humanoid
robot with natural interaction for education and enter-
tainment. Procedia computer science, 116:564–570.
Carr, C., Wang, P., and Wang, S. (2023). A human-friendly
verbal communication platform for multi-robot sys-
tems: Design and principles. In UK Workshop on
Computational Intelligence, pages 580–594. Springer.
Dahiya, A., Aroyo, A. M., Dautenhahn, K., and Smith, S. L.
(2023). A survey of multi-agent human–robot inter-
action systems. Robotics and Autonomous Systems,
161:104335.
Del Bianco, E., Torielli, D., Rollo, F., Gasperini, D., Lau-
renzi, A., Baccelliere, L., Muratore, L., Roveri, M.,
and Tsagarakis, N. G. (2024). A high-force gripper
with embedded multimodal sensing for powerful and
perception driven grasping. In 2024 IEEE-RAS 23rd
International Conference on Humanoid Robots (Hu-
manoids), pages 149–156. IEEE.
Heppner, G., Oberacker, D., Roennau, A., and Dillmann, R.
(2024). Behavior tree capabilities for dynamic multi-
robot task allocation with heterogeneous robot teams.
arXiv preprint arXiv:2402.02833.
Kumatani, K., Arakawa, T., Yamamoto, K., McDonough, J.,
Raj, B., Singh, R., and Tashev, I. (2012). Microphone
array processing for distant speech recognition: To-
wards real-world deployment. In Proceedings of The
2012 Asia Pacific Signal and Information Processing
Association Annual Summit and Conference, pages 1–
10. IEEE.
Marin Vargas, A., Cominelli, L., Dell’Orletta, F., and
Scilingo, E. P. (2021). Verbal communication in
robotics: A study on salient terms, research fields and
trends in the last decades based on a computational
linguistic analysis. Frontiers in Computer Science,
2:591164.
Muratore, L., Laurenzi, A., De Luca, A., Bertoni, L.,
Torielli, D., Baccelliere, L., Del Bianco, E., and
Tsagarakis, N. G. (2023). A unified multimodal in-
terface for the relax high-payload collaborative robot.
Sensors, 23(18):7735.
Padmanabha, A., Yuan, J., Gupta, J., Karachiwalla, Z.,
Majidi, C., Admoni, H., and Erickson, Z. (2024).
Voicepilot: Harnessing llms as speech interfaces for
physically assistive robots. In Proceedings of the 37th
Annual ACM Symposium on User Interface Software
and Technology, pages 1–18.
Papavasileiou, A., Nikoladakis, S., Basamakis, F. P., Aivali-
otis, S., Michalos, G., and Makris, S. (2024). A voice-
enabled ros2 framework for human–robot collabora-
tive inspection. Applied Sciences, 14(10):4138.
Pyo, S., Lee, J., Bae, K., Sim, S., and Kim, J. (2021).
Recent progress in flexible tactile sensors for human-
interactive systems: from sensors to advanced appli-
cations. Advanced Materials, 33(47):2005902.
Rizk, Y., Awad, M., and Tunstel, E. W. (2019). Cooperative
heterogeneous multi-robot systems: A survey. ACM
Computing Surveys (CSUR), 52(2):1–31.
Rogowski, A. (2022). Scenario-based programming of
voice-controlled medical robotic systems. Sensors,
22(23):9520.
Rollo, F., Raiola, G., Tsagarakis, N., Roveri, M., Hoffman,
E. M., and Ajoudani, A. (2024a). Semantic-based
loco-manipulation for human-robot collaboration in
industrial environments. In European Robotics Forum
2024, pages 55–59. Springer Nature Switzerland.
Rollo, F., Raiola, G., Zunino, A., Tsagarakis, N., and
Ajoudani, A. (2023a). Artifacts mapping: Multi-
modal semantic mapping for object detection and 3d
localization. In 2023 European Conference on Mobile
Robots (ECMR), pages 1–8. IEEE.
Rollo, F., Zunino, A., Raiola, G., Amadio, F., Ajoudani,
A., and Tsagarakis, N. (2023b). Followme: a ro-
bust person following framework based on visual re-
identification and gestures. In 2023 IEEE Interna-
tional Conference on Advanced Robotics and Its So-
cial Impacts (ARSO), pages 84–89. IEEE.
Rollo, F., Zunino, A., Tsagarakis, N., Hoffman, E. M., and
Ajoudani, A. (2024b). Continuous adaptation in per-
son re-identification for robotic assistance. In 2024
IEEE International Conference on Robotics and Au-
tomation (ICRA), pages 425–431. IEEE.
Stone, P. and Veloso, M. (2000). Multiagent systems: A sur-
vey from a machine learning perspective. Autonomous
Robots, 8:345–383.
Su, H., Qi, W., Chen, J., Yang, C., Sandoval, J., and Laribi,
M. A. (2023). Recent advancements in multimodal
human–robot interaction. Frontiers in Neurorobotics,
17:1084000.
A Scalable Robot-Agnostic Voice Control Framework for Multi-Robot Systems
201
