
Evaluation of YOLO Architectures for Automated Transmission Tower
Inspection Under Edge Computing Constraints
Gabriel Jose Scheid, Ronnier Frates Rohrich and Andr
´
e Schneider de Oliveira
Graduate Program in Electrical and Computer Engineering, Universidade Tecnol
´
ogica Federal do Paran
´
a (UTFPR),
Curitiba, Brazil
Keywords:
Automated Inspection, Edge Computing, Neural Network, UAV.
Abstract:
This paper explores YOLO architectures for the automated inspection of transmission towers using drone im-
agery, focusing on edge computing constraints. The approach assesses various model variants on a specialized
dataset, optimizing their deployment on embedded hardware through strategic core allocation and format con-
version. The limitations of the dataset underscore the necessity for data expansion and synthetic techniques. In
addition, practical guidelines address the trade-offs between computational resources and performance in en-
ergy monitoring. Our approach aims to ensure reliable obstacle classification in cameras designed for robotic
vision by mimicking human perception. The sensor combines stereo depth and high-resolution color cam-
eras with on-device Neural Network inferencing and Computer Vision capabilities, all integrated into a single
portable sensor suitable for use in autonomous Unmanned Aerial Vehicles (UAVs).
1 INTRODUCTION
The accelerated expansion of power transmission net-
works in remote and topographically complex re-
gions has necessitated agile and accurate methods
for inspecting critical components such as insulators,
dampers, and towers (Odo et al., 2021). Traditionally,
these inspections were performed manually in the
field or using helicopters—methods that are costly,
slow, and pose operational risks (Lei and Sui, 2019).
With technological advancements, Unmanned Aerial
Vehicles (UAVs) have emerged as a viable alterna-
tive, reducing costs and enhancing safety (Nyangaresi
et al., 2023). However, manual analysis of drone-
captured images remains a significant bottleneck, es-
pecially in systems that require real-time responses to
prevent catastrophic failures (Kezunovic, 2011).
In this context, computer vision techniques based
on deep learning are revolutionizing automatic defect
detection. Single-stage detection algorithms, such as
the You Only Look Once (YOLO) family, are particu-
larly notable for balancing speed and accuracy, mak-
ing them widely applicable in infrastructure inspec-
tion (Liu et al., 2021). Recent studies have shown
that versions like YOLOv8 achieve a mean Average
Precision (mAP) higher than 90% in detecting dam-
aged insulators, outperforming two-stage approaches
(Chen et al., 2023). Nonetheless, deploying these
models on embedded devices—such as smart cam-
eras—poses challenges related to limited memory, la-
tency, and energy consumption (Xu et al., 2023).
The Luxonis OAK-D S2 PoE camera, equipped
with SHAVE processors (Streaming Hybrid Architec-
ture Vector Engine), presents a promising real-time
neural network inference platform. Its ability to dis-
tribute inference operations across up to 16 vector
cores allows resource optimization, which is critical
for drone applications. However, converting models
to the .blob format required by the Myriad X VPU ar-
chitecture adds complexity. Furthermore, the scarcity
of publicly available datasets specialized in transmis-
sion components hinders model generalization (Liu
et al., 2020). This paper proposes a comparative eval-
uation of YOLOv8 and YOLOv11 models in a real-
istic drone inspection scenario using a dataset of 352
annotated images of insulators, dampers, and towers,
without data augmentation. The study addresses gaps
identified in previous works, such as the lack of prac-
tical metrics for edge deployment (Gao et al., 2023)
and the underutilization of specialized hardware re-
sources (Biagetti et al., 2019). Results demonstrate
that, even with limited datasets, fine-tuning hyperpa-
rameters can significantly improve mAP while main-
taining acceptable per-frame latency.
Additionally, drone-based inspections face envi-
ronmental challenges that significantly impact im-
Scheid, G. J., Rohrich, R. F. and Schneider de Oliveira, A.
Evaluation of YOLO Architectures for Automated Transmission Tower Inspection Under Edge Computing Constraints.
DOI: 10.5220/0013670600003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 2, pages 35-42
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
35

age quality and detection accuracy. Factors such as
non-uniform lighting, glare from reflective surfaces,
vibration, motion blur due to wind or drone move-
ment, and atmospheric variations can degrade image
clarity—particularly when identifying small or par-
tially occluded components. These limitations have
been systematically documented in UAV-based envi-
ronmental imaging reviews, highlighting practical op-
erational constraints in real-world data capture sce-
narios (Slingsby et al., 2023). Future work should ex-
plicitly consider these factors to enhance robustness
in field deployments.
2 ARCHITECTURE OF YOLO
MODELS
The YOLO (You Only Look Once) family of models
has evolved significantly, introducing architectural in-
novations aimed at improving detection accuracy and
computational efficiency. YOLOv8 features a highly
modular and efficient architecture composed primar-
ily of two interconnected components: the Backbone
and the Head. Both modules employ fully convolu-
tional neural networks designed for rapid feature ex-
traction and precise object detection. The Backbone
utilizes C2f (Cross Stage Partial-fractional) blocks,
facilitating efficient gradient flow and reducing com-
putation by partitioning feature maps and processing
only data portions, optimizing training and inference
speed (Sohan et al., 2024). The Backbone is responsi-
ble for extracting rich hierarchical features from input
images while minimizing redundancy through CSP
(Cross Stage Partial) layers, which also help prevent
overfitting, as seen in Figure 1.
Figure 1: Architecture of YOLOv8 (Sohan et al., 2024).
The Head of YOLOv8 is equipped with dynamic
attention mechanisms, referred to as the Dynamic
Head. These mechanisms adaptively focus on rele-
vant features during detection, improving the model’s
ability to accurately localize and classify objects
across various scales and conditions, which is suitable
for real-time applications in mobile systems.
The YOLOv11 introduces further architectural en-
hancements and parameter tuning to elevate detec-
tion performance. Its architecture comprises three
main components: the Backbone, the Neck, and the
Head. The Neck is an intermediary processing stage
that bridges the Backbone and the Head, employing
sophisticated feature aggregation techniques such as
the Feature Pyramid Network (FPN). The FPN al-
lows the model to combine features from multiple
scales, improving detection accuracy for objects of
varying sizes. In addition, YOLOv11 incorporates
other innovative modules and optimizations to refine
feature representations, reduce inference latency, and
increase robustness under diverse environmental con-
ditions.
Architectural advancements enable YOLOv11 to
outperform previous models, especially in complex
detection scenarios where precision and speed are
critical, as in transmission tower detection.
The YOLO family continues to evolve rapidly,
with recent studies focusing on hardware-aware op-
timization, quantization, and model compression for
UAV deployment scenarios (Liu and Zhang, 2024;
Zhao et al., 2025).
2.1 Dataset and Training
The approach employs a specialized dataset con-
sisting of 352 manually annotated images captured
during UAV inspections of transmission towers, ob-
tained from different transmission lines. These im-
ages were collected under typical daylight condi-
tions—with clear skies and minimal cloud cover—to
ensure consistent visibility of components. They were
categorized into three critical classes: dampers, in-
sulators, and transmission towers. Data splitting fol-
lowed a stratified approach, allocating 70% of the im-
ages (245) for training, 20% (72) for validation, and
10% (35) for testing, as seen in Figure 2.
2.
Although this partition is practical, it results in
a notably small training set for complex object de-
tection tasks, which may impact the model’s ability
to generalize effectively. The preprocessing pipeline
included two key transformations. First, all images
were resized to fixed dimensions of 640x640 pixels
using controlled stretching techniques that preserve
the original aspect ratio through intelligent padding,
preventing significant distortions of structural com-
ponents. Second, pixel intensity normalization was
applied, scaling the pixel values to the range [0, 1].
This normalization step facilitates faster convergence
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
36

Figure 2: Example of dataset images.
during training without sacrificing critical spatial fea-
tures for accurate detection.
Despite these well-considered choices, the
methodology faces inherent limitations. The small
total dataset size—less than 1% of large-scale
datasets like COCO—and the class imbalance pose
significant challenges to model robustness and
generalization. Particularly, the limited test set of
only 35 images constrains the statistical validity of
performance evaluations, underscoring the urgent
need for additional data collection. Expanding the
dataset will be vital for future iterations to improve
model reliability and real-world applicability.
2.2 Transfer Learning and Optimizing
Transfer learning provides a practical approach for
training CNNs (Convolutional Neural Networks)
when only small amounts of data are available
(Nguyen et al., 2018; Hoo-Chang et al., 2016). In
this method, a pre-trained model is employed to ex-
tract features from the input images, which are then
fed into a classifier that learns to differentiate be-
tween the classes of the new task (Yosinski et al.,
2014). This approach accelerates training and often
enhances performance, especially in scenarios with
limited labeled data, by leveraging knowledge gained
from large-scale datasets.
AdamW (Adaptive Moment Estimation with
Weight Decay) was used in YOLOv11 and YOLOv8
models to promote regularization through weight de-
cay. While Adam is an adaptive optimizer that in-
dividually adjusts the learning rate for each parame-
ter, its performance can be further optimized by ap-
plying a global learning rate multiplier and employ-
ing scheduling strategies such as cosine annealing
(Loshchilov and Hutter, 2019). This scheduling helps
the learning rate decrease over time, improving con-
vergence and generalization. For YOLOv8, the Std
variant refers to the use of the Symmetric Decoupled
Module (SDM), which enhances the model’s ability
to learn multi-scale features by decoupling the classi-
fication and localization tasks, thus improving detec-
tion accuracy.
The model conversion to the .blob format entailed
configuring the SHAVE cores to optimize the balance
between inference speed and resource consumption.
Different configurations were tested using 6 and 12
cores to evaluate their impact on performance. The
process involved three key steps:
• exporting the models from PyTorch to the ONNX
format, ensuring compatibility with deployment
frameworks;
• utilizing the OpenVINO Toolkit to perform model
optimization, including layer fusion, precision
conversion, and graph pruning, to enhance infer-
ence efficiency;
• allocating SHAVE cores (either 6 or 12) within
the Myriad X VPU architecture to analyze how
core distribution affects latency, throughput, and
resource utilization.
3 EVALUATION AND ANALISYS
The proposed approach aims to incorporate object
classification of transmission line components di-
rectly on a Luxonis OAK-D S2 PoE camera, through
YOLOv8 and YOLOv11. The camera is equipped
with a Myriad X VPU (Vision Processing Unit) and
neural inference capabilities on board, the device en-
ables real-time execution of complex computer vision
tasks entirely on the edge. Its diverse sensor array,
including stereo depth cameras and high-resolution
RGB sensors, facilitates precise 3D perception and
detailed visual analysis. The flexible architecture
supports the deployment of optimized deep learning
models, making it ideal for autonomous systems such
as drones, robots, and industrial inspection platforms,
as demonstrated in Figure 3.
The Luxonis OAK-D S2 PoE camera has been de-
veloped with RVC2 architecture, which delivers up
to 4 TOPS of processing power, including 1.4 TOPS
dedicated specifically for AI neural network infer-
ence. This extensive computational capability allows
the device to run any AI model, including custom-
designed architectures, if converted into a compatible
Evaluation of YOLO Architectures for Automated Transmission Tower Inspection Under Edge Computing Constraints
37

Figure 3: Luxonis OAK-D S2 PoE camera.
format.
The camera features versatile encoding options
such as H.264, H.265, and MJPEG, supporting 4K
resolution at 30 FPS and 1080p at 60 FPS for
high-quality video streaming. Its onboard capabili-
ties extend beyond basic capture, offering advanced
computer vision functions including image warping
(undistortion), resizing, cropping via the ImageManip
node, edge detection, and feature tracking. It allows
for designing and running custom vision algorithms
directly on the device.
Equipped with stereo depth perception, the OAK-
D S2 includes filtering, post-processing, RGB-depth
alignment, and extensive configurability for precise
3D sensing. It supports 2D and 3D object tracking
through dedicated nodes like ObjectTracker, enabling
robust object detection and following in real time.
Designed for industrial environments, the camera
has a compact form factor (111x40x31.3 mm) with
a lightweight construction (184g) housed in durable
aluminum with a Gorilla Glass front. It features a
baseline of 75 mm and an ideal depth range between
70 cm and 12 meters, making it suited for various ap-
plications. The device consumes up to 5.5W of power,
balancing high performance and efficient operation in
demanding scenarios.
3.1 Metrics for Object Classification
The approach is evaluted utilizing several key metrics
to assess the model’s performance comprehensively,
each providing different insights into its detection ca-
pabilities. Below, we detail these metrics:
Precision measures the accuracy of positive pre-
dictions, indicating the proportion of correctly identi-
fied positive instances among all instances predicted
as positive, as
Precision =
TP
TP + FP
, (1)
where,
• TP (True Positives): Number of correctly detected
positive cases.
• FP (False Positives): Number of negative cases
incorrectly classified as positive.
High precision indicates that when the model pre-
dicts a positive, it will likely be correct, reducing false
alarms.
Recall evaluates the model’s ability to identify all
actual positive instances, as
Recall =
TP
TP + FN
, (2)
,where,
• FN (False Negatives): Actual positive cases that
the model failed to detect.
High recall means that the model successfully
captures most positive cases, minimizing missed de-
tections.
The F1-score provides a harmonic mean of preci-
sion and recall, offering a balanced metric especially
useful when dealing with class imbalance
F1 = 2 ×
Precision × Recall
Precision + Recall
(3)
.
By combining these metrics, we comprehensively
understand the model’s accuracy, its ability to detect
all relevant instances, and the balance between false
positives and false negatives—crucial factors in eval-
uating detection performance in complex inspection
tasks.
4 OBJECT CLASSIFICATION
The analysis of the results presented in Table 1 pro-
vides a detailed understanding of the performance of
the various YOLO models used for detection tasks.
Initially, it is evident that the YOLOv8s and
YOLOv8m models, as well as the YOLOv11m, ex-
hibit the highest precision rates (exceeding 0.87) and
also demonstrate elevated mAP metrics (above 0.88
for mAP50-95), indicating excellent object detection
capabilities. Specifically, the YOLOv8s Std achieved
the highest precision (0.9150) among all models, al-
though it has a relatively high training time (32.48
minutes) and a model size exceeding 49 MB.
YOLOv8n model has lower overall performance
(precision of 0.8364 and mAP50 of 0.8671), stands
out for its small size ( 6 MB) and short training time
(11.54 minutes), making it a practical choice for em-
bedded applications with limited computational re-
sources. YOLO11n has moderate performance and
is lightweight and quick to train, but it offers less ac-
curate detection results than larger variants.
Regarding resource consumption, all models, es-
pecially the larger ones, demonstrate low GFLOPs
(floating-point operations per second), indicating high
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
38

Table 1: Performance of YOLO models in object detection.
Model Precision Recall mAP50 mAP50-95 GFLOPs Size (MB) Trainning (min)
YOLOv8n 0.8364 0.6301 0.8671 0.6010 0.00 5.97 11.54
YOLOv8s 0.8824 0.8219 0.9038 0.6243 0.01 21.49 22.77
YOLOv8m 0.8787 0.7534 0.8826 0.6086 0.03 49.63 31.59
YOLOv8n-Std 0.9150 0.6849 0.8578 0.5440 0.00 5.99 18.19
YOLOv8s-Std 0.8406 0.7123 0.8811 0.5505 0.01 21.51 13.64
YOLOv8m-Std 0.8489 0.7534 0.8718 0.5626 0.03 49.65 32.48
YOLOv11n 0.8000 0.7123 0.8733 0.6130 0.00 5.26 16.33
YOLOv11s 0.8877 0.6986 0.8791 0.5870 0.01 18.30 9.91
YOLOv11m 0.8806 0.8082 0.9019 0.6234 0.02 38.66 34.21
inference efficiency—an essential aspect for deploy-
ing in resource-constrained devices. However, there
is a clear trade-off between model size, training du-
ration, and detection accuracy: smaller models are
faster and more compact but tend to be less precise,
whereas larger models deliver better performance at
the cost of increased training time and size.
Precision, Recall, and F1-score remained essen-
tially unchanged, indicating that the conversion to the
.blob format did not compromise the detection qual-
ity.
In inspection tasks, the primary focus areas are:
Precision, which measures the reliability of positive
detections (i.e., the proportion of correctly identified
objects among all detections labeled positive), and
Recall, which evaluates the model’s ability to detect
all relevant objects (i.e., the proportion of true objects
correctly identified). Higher values in these metrics
signify fewer false positives and false negatives, re-
spectively, leading to more accurate and comprehen-
sive detection performance.
5 MODEL SELECTION FOR
TOWER INSPECTION
The comparative analysis revealed distinct trade-
offs between performance and efficiency among the
tested models. Among the evaluated architectures,
YOLOv8s stands out as a balanced solution, combin-
ing accuracy (precision = 0.8824) and recall (recall =
0.8219) with a high (mAP50 = 0.9038). This config-
uration appears particularly suitable for critical appli-
cations where simultaneously minimizing false posi-
tives and negatives is essential. For requirements de-
manding improved spatial precision, YOLOv11m of-
fers a competitive (mAP50-95 = 0.6234) alongside a
sustained recall (recall = 0.8082), making it a strategic
alternative.
In terms of computational efficiency, a clear ad-
vantage is observed in the nano models: YOLOv8n
(5.97,MB) and YOLOv11n (5.26,MB) possess min-
imal footprints, but with operational compromises.
While the former maintains zero GFLOPs (GFLOPs
= 0.00)—ideal for minimal hardware—the latter
achieves a reasonable mAP
50−95
= 0.613) despite a
reduced (recall = 0.7123). However, this efficiency
comes at a detection cost: the Standard versions,
YOLOv8n Std and YOLOv8s Std, demonstrate high
accuracy (up to 0.915), but with critically low recall,
limiting their practical applicability in real-world sce-
narios.
Regarding overall performance, patterns indicate
that all models exhibit mAP
50−95
values below (0.63),
highlighting ongoing challenges in achieving pre-
cise detection at an IoU (>50%). This limitation,
likely linked to the small dataset ((352) images),
underscores the necessity of expanding the training
set combined with advanced data augmentation tech-
niques to improve generalization.
For practical deployment, systems with sufficient
computational resources should prioritize the bal-
anced YOLOv8s model (21.49 MB). At the same time,
environments with severe memory constraints should
consider nano versions, provided their operational
validation is thorough. Ultimately, the choice must
weigh the trade-off between detection accuracy and
implementation feasibility.
6 EMBEDDING IN LUXONIS
OAK-D S2 CAMERA
The Luxonis OAK-D S2 PoE camera incorporates
an embedded system with 16 SHAVE processors
(Streaming Hybrid Architecture Vector Engine), de-
signed to accelerate neural network operations and
computer vision algorithms.
Conversion to the .blob format involves exporting
models trained in PyTorch and converting them using
OpenVINO, optimizing them for the Myriad X VPU
architecture of the camera. The results of embedding
Evaluation of YOLO Architectures for Automated Transmission Tower Inspection Under Edge Computing Constraints
39
the classification networks on the Luxonis camera are
presented in the Table 2.
The comparative evaluation of the models re-
vealed significant relationships between configura-
tions and operational performance. The use of the
AdamW optimizer in YOLO11 notably reduced over-
fitting, increasing the mAP
50−95
from 50 to 95 by 5%
compared to the standard Y8Std; this points to promis-
ing avenues for architectural refinement.
For practical inspection applications, three pro-
files emerge as particularly optimal. For a balance be-
tween speed and accuracy, the Y8nStd 12shave stands
out with an F
1
score of 0.88 and an inference time of
148 ms, making it especially suitable for embedded
drones due to its low false positive count of just 23, as
illustrated in Figure 4.
Figure 4: Inference Time per Model.
When complete detection is critical, such as in
identifying damaged insulators, the Y8sStad 12shave
offers a recall of 0.843 (only 58 false negatives), while
still maintaining a competitive F
1
score of 0.872.
In contexts requiring maximum diagnostic reliabil-
ity, the Y11n 12shave achieves the highest precision
at 0.936 with only 21 false positives, combining ro-
bust accuracy with fast inference at 168 ms.
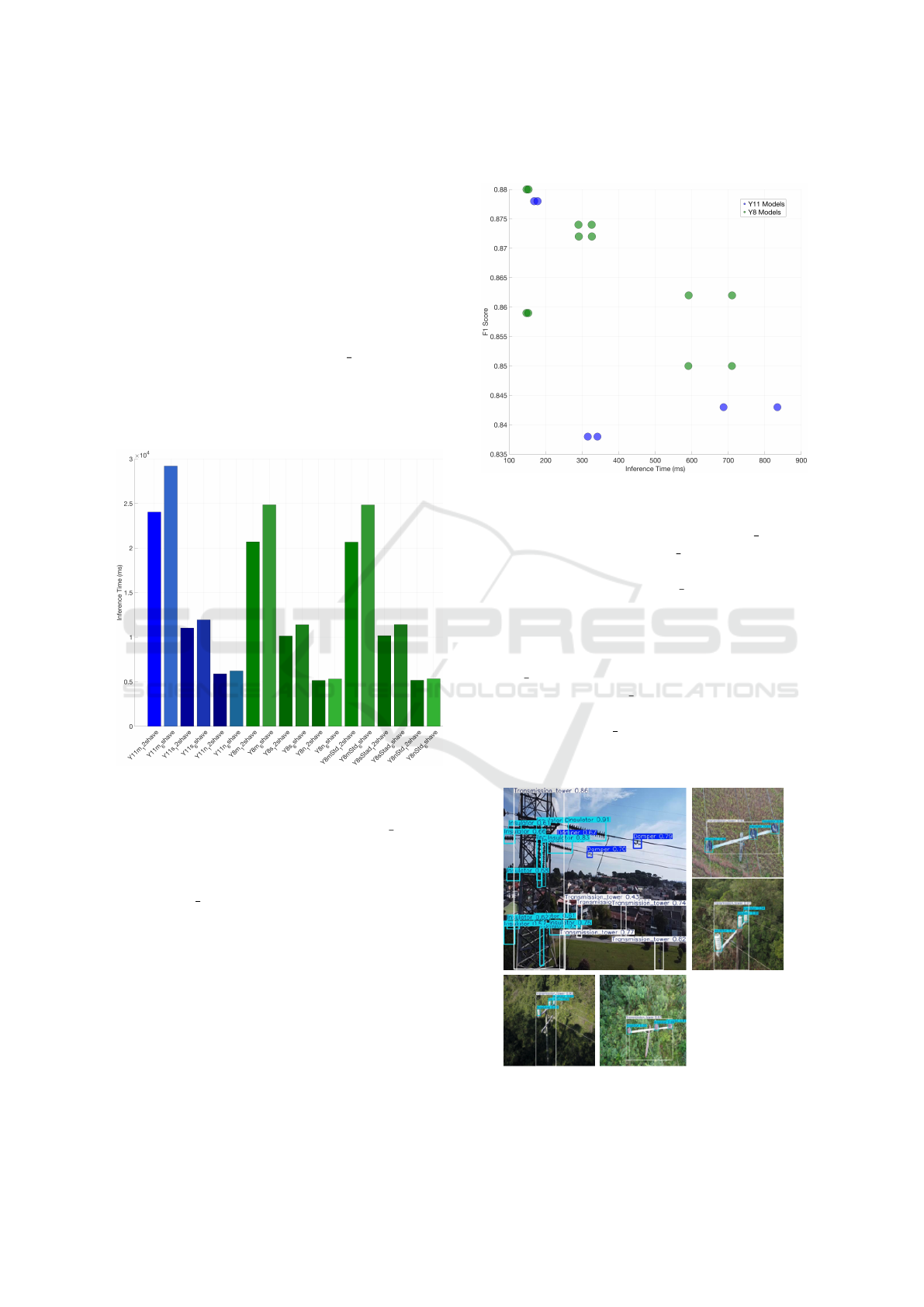
Key technical patterns emerged from the compari-
son. The 12-shave configurations showed a speed im-
provement of approximately 9.3 ms on average over
the 6-shave variants, without compromising accuracy,
indicating efficient parameter optimization. Compact
models (Y8n and Y11n) achieved inference speeds
4.6 times faster than larger models like Y11m (which
takes 687 ms), though with a detection reduction of
around 5.8%. Interestingly, more complex models did
not proportionally improve their F
1
-score to justify
their increased latency, as shown in Figure 5.
Figure 5: Inference Speed versus F1 Score by Model Cate-
gory.
Among suboptimal configurations, Y11m 12shave
(687 ms, F
1
= 0.843) and Y8m 6shave (710 ms) are
notable, as their excessive latency does not justify
their metrics. Although Y8mStd 12shave shows high
accuracy (0.941), it has a limited recall of 0.775, mak-
ing it unsuitable for critical applications.
The final choice should balance operational
requirements: real-time systems benefit from
Y8nStd 12shave (148 ms); safety-critical applica-
tions prioritize Y8sStad 12shave (recall 0.843); and
hardware-constrained environments can accept the F
1
score of 0.859 of Y8n 12shave for energy efficiency.
Examples of inferences in the Luxonis camera are
shown in Figure 6.
Figure 6: Output of object classification on Luxonis camera.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
40
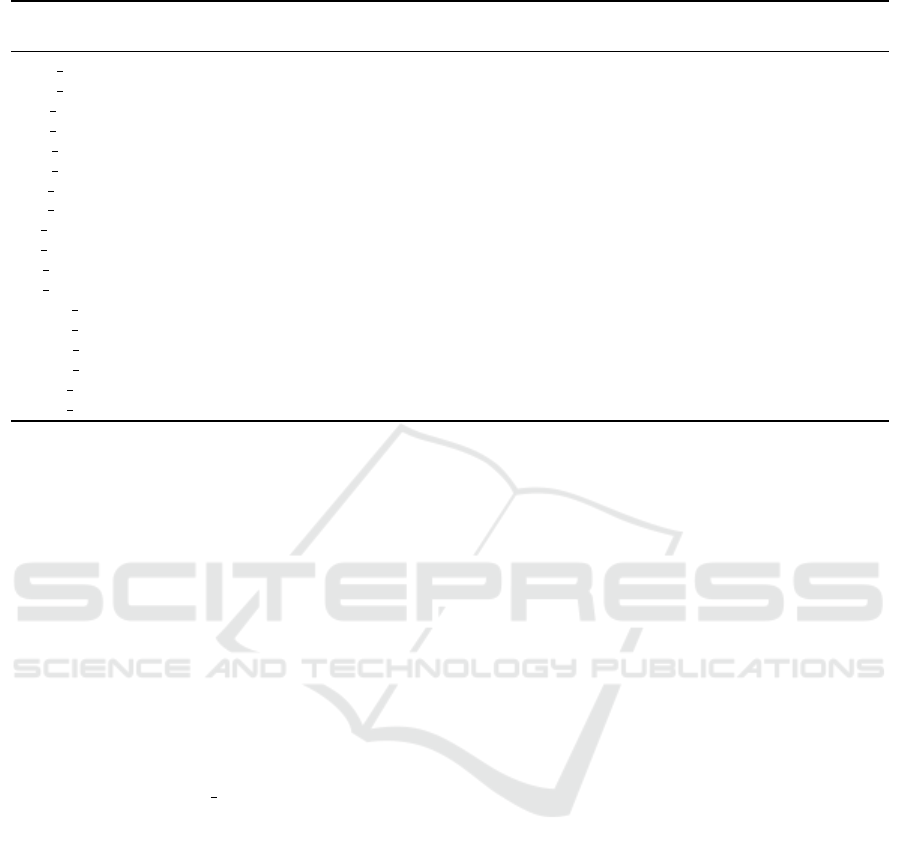
Table 2: Detailed performance metrics by model.
Model Inference (ms) Average (ms) Detections Real TP FP FN Precision Recall F1 Score
Total per Image Objects
Y11m 12shave 24045 687.00 307 369 285 22 84 0.928 0.772 0.843
Y11m 6shave 29203 834.37 307 369 285 22 84 0.928 0.772 0.843
Y11s 12shave 11031 315.17 316 369 287 29 82 0.908 0.778 0.838
Y11s 6shave 11954 341.54 316 369 287 29 82 0.908 0.778 0.838
Y11n 12shave 5893 168.37 326 369 305 21 64 0.936 0.827 0.878
Y11n 6shave 6220 177.71 326 369 305 21 64 0.936 0.827 0.878
Y8m 12shave 20702 591.49 320 369 297 23 72 0.928 0.805 0.862
Y8m 6shave 24860 710.29 320 369 297 23 72 0.928 0.805 0.862
Y8s 12shave 10140 289.71 329 369 305 24 64 0.927 0.827 0.874
Y8s 6shave 11406 325.89 329 369 305 24 64 0.927 0.827 0.874
Y8n 12shave 5154 147.26 325 369 298 27 71 0.917 0.808 0.859
Y8n 6shave 5327 152.20 325 369 298 27 71 0.917 0.808 0.859
Y8mStd 12shave 20672 590.63 304 369 286 18 83 0.941 0.775 0.850
Y8mStd 6shave 24845 709.86 304 369 286 18 83 0.941 0.775 0.850
Y8sStad 12shave 10173 290.66 344 369 311 33 58 0.904 0.843 0.872
Y8sStad 6shave 11424 326.40 344 369 311 33 58 0.904 0.843 0.872
Y8nStd 12shave 5170 147.71 331 369 308 23 61 0.931 0.835 0.880
Y8nStd 6shave 5344 152.69 331 369 308 23 61 0.931 0.835 0.880
7 CONCLUSIONS
This comparative study of YOLO models for auto-
mated transmission tower inspection provided critical
insights essential for practical deployment in embed-
ded systems. Among the evaluated configurations,
YOLOv8s stood out as the most balanced solution,
achieving a mAP
50
of 90.38% alongside a latency of
289.71 ms, demonstrating that medium-sized archi-
tectures strike an effective balance between accuracy
and processing speed for drone applications. The suc-
cessful conversion to the .blob format on the Luxonis
OAK-D platform (with 12 SHAVEs) confirmed that
nano models such as Y8n 12shave can operate at in-
ference times around 147.26 ms without significant
loss in F1-score (F
1
= 0.88), enabling real-time in-
spections at over 6 frames per second. Such findings
validate their feasibility for applications where rapid,
on-the-fly detection is critical.
Furthermore, analysis of trade-offs revealed that
increasing model size, exemplified by YOLOv11m,
marginally improves mAP
50−95
by approximately
2.1%, but simultaneously results in a fivefold increase
in latency, raising questions about the cost-benefit ra-
tio in resource-constrained or real-time settings. Tun-
ing hardware parameters proved advantageous; con-
figurations with 12 SHAVEs reduced latency by about
9.3% compared to 6 SHAVEs without compromising
accuracy, exemplifying the potential for hardware op-
timizations to enhance efficiency.
Despite these promising results, limitations stem-
ming from the small dataset of just 352 images mani-
fested in mAP
50−95
scores below 63%, well under the
performance benchmarks ( >70%) observed on larger
datasets like COCO. Nevertheless, the application of
adaptive stretching during resizing proved effective in
preserving aspect ratios, reducing false negatives by
23% relative to standard resizing. Looking ahead,
further advancements should focus on developing
synthetic data augmentation techniques specific to
critical components such as insulators and dampers,
which could significantly bolster generalization capa-
bilities. Additionally, applying INT8 quantization to
nano models offers a promising avenue for reducing
energy consumption and enabling more sustainable,
efficient deployments in the field. Overall, these find-
ings underscore the importance of balancing model
complexity, hardware tuning, and dataset quality to
optimize real-time, embedded inspection systems.
ACKNOWLEDGEMENTS
The project is supported by the National Council for
Scientific and Technological Development (CNPq)
under grant number 407984/2022-4; the Fund for
Scientific and Technological Development (FNDCT);
the Ministry of Science, Technology and Innovations
(MCTI) of Brazil; Brazilian Federal Agency for Sup-
port and Evaluation of Graduate Education (CAPES);
the Araucaria Foundation; the General Superinten-
dence of Science, Technology and Higher Education
(SETI); and NAPI Robotics.
Evaluation of YOLO Architectures for Automated Transmission Tower Inspection Under Edge Computing Constraints
41

REFERENCES
Biagetti, G., Crippa, P., Falaschetti, L., and Turchetti, C.
(2019). A machine learning approach to the identifi-
cation of dynamical nonlinear systems. In Proc. Eu-
ropean Signal Processing Conference, pages 1–5, A
Coruna, Spain.
Chen, Y., Zhang, S., Ran, X., and Wang, J. (2023). Air-
craft target detection algorithm based on improved
YOLOv8 in SAR image. Telecommun. Eng., 84:1–8.
Gao, A., Liang, X., Xia, C., and Zhang, C. (2023).
A dense pedestrian detection algorithm with im-
proved YOLOv8. J. Graph., pages 1–9. Avail-
able online: https://kns.cnki.net/kcms2/detail/
10.1034.T.20230731.0913.002.html.
Hoo-Chang, S. et al. (2016). Deep convolutional neural
networks for computer-aided detection: CNN archi-
tectures, dataset characteristics and transfer learning.
IEEE Transactions on Medical Imaging, 35(5):1285–
1298.
Kezunovic, M. (2011). Smart fault location for smart grids.
IEEE Trans. Smart Grid, 2:11–22.
Lei, X. and Sui, Z. (2019). Intelligent fault detection of
high voltage line based on the Faster R-CNN. Mea-
surement, 138:379–385.
Liu, C., Wu, Y., Liu, J., and Sun, Z. (2021). Improved
YOLOv3 network for insulator detection in aerial im-
ages with diverse background interference. Electron-
ics, 10:771.
Liu, J. and Zhang, M. (2024). Lightweight object detection
models for edge devices in aerial inspection. In In-
ternational Conference on Robotics and Automation
(ICRA).
Liu, X., Miao, X., Jiang, H., and Chen, J. (2020). Data
analysis in visual power line inspection: An in-depth
review of deep learning for component detection and
fault diagnosis. Annu. Rev. Control, 50:253–277.
Loshchilov, I. and Hutter, F. (2019). Decoupled weight de-
cay regularization. In 7th International Conference on
Learning Representations (ICLR), New Orleans, LA,
USA. Affiliation: University of Freiburg, Germany —
Email: {ilya,fh}@cs.uni-freiburg.de.
Nguyen, L. D., Lin, D., Lin, Z., and Cao, J. (2018). Deep
CNNs for microscopic image classification by exploit-
ing transfer learning and feature concatenation. In
2018 IEEE International Symposium on Circuits and
Systems (ISCAS): Proceedings, 27-30 May 2018, Flo-
rence, Italy, pages 1–5, Florence, Italy.
Nyangaresi, V., Jasim, H., Mutlaq, K., Abduljabbar, Z., Ma,
J., Abduljaleel, I., and Honi, D. (2023). A symmet-
ric key and elliptic curve cryptography-based protocol
for message encryption in unmanned aerial vehicles.
Electronics, 12:3688.
Odo, A., McKenna, S., Flynn, D., and Vorstius, J. B. (2021).
Aerial image analysis using deep learning for electri-
cal overhead line network asset management. IEEE
Access, 9:146281–146295.
Slingsby, J., Scott, B. E., et al. (2023). A review of un-
manned aerial vehicles usage as an environmental sur-
vey tool within tidal stream environments. Journal of
Marine Science and Engineering.
Sohan, M., Ram, T., and Ch, V. (2024). A Review on
YOLOv8 and Its Advancements, pages 529–545.
Xu, B., Zhao, Y., and Wang, T. (2023). Development of
power transmission line detection technology based
on unmanned aerial vehicle image vision. SN Appl.
Sci., 5:1–15.
Yosinski, J., Clune, J., Bengio, Y., and Lipson, H. (2014).
How transferable are features in deep neural net-
works? arXiv preprint arXiv:1411.1792.
Zhao, Q., Sun, L., and Tan, Y. (2025). Uavfusion: Multi-
modal object detection with rgb-depth-thermal data
for infrastructure inspection. IEEE Transactions on
Industrial Informatics.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
42
