
Enhancing Pharmaceutical Batch Processes Monitoring with Predictive
LSTM-Based Framework
Daniele Antonucci
1,2
, Davide Bonanni
3
, Domenico Palumberi
3
, Luca Consolini
4
and Gianluigi
Ferrari
4
1
Department of Information Engineering and Architecture, University of Parma, Via delle Scienze 181/a, Italy
2
Department of Electrical and Information Engineering , Politecnico of Bari, Via Re David 200, 70125 Bari, Italy
3
GlaxoSmithKline s.p.a., Strada Provinciale Asolana, 90, San Polo Torrile, Parma, Italy
4
Department of Information Engineering and Architecture, Universit
`
a di Parma, Via delle Scienze 181/a, Parma, Italy
Keywords:
Anomaly Detection, Predictive Maintenance, Machine Learning, Artificial Intelligence, AutoEncoder,
Time-Series Forecasting, Hyperparameter Optimization, Fault Detection.
Abstract:
Monitoring industrial processes and understanding deviations is critical in ensuring product quality, process
efficiency, and early detection of anomalies. Traditional methods for dimensionality reduction and anomaly
detection, such as Principal Component Analysis (PCA) or Partial Least Squares (PLS), often struggle to
capture the complex and dynamic nature of batch data. In this study, we propose a novel approach that
combines an AutoEncoder (AE), based on Long Short-Term Memory (LSTM) layers, with a rolling threshold
for anomaly evaluation. Unlike conventional threshold methods that rely on global statistical parameters, the
applied threshold leverages rolling median and rolling Median Absolute Deviation (MAD) to adaptively detect
deviations, making it more resilient to outliers and distribution shifts. The LSTM-AE demonstrates superior
performance in anomaly detection with respect to PCA and more recent model approaches, specifically for
the reference dataset, obtained from a GlaxoSmithKline (GSK) production plant. Additionally, an LSTM
regression model is employed to forecast future data points, which are then fed into the LSTM-AE to enable
a predictive approach. This framework leverages the temporal dependencies captured by LSTM layers and
reconstruction efficiency of the AE, facilitating a predictive anomaly detection in real-world applications.
1 INTRODUCTION
An anomaly is an unexpected deviation from nor-
mal system behavior, representing data points or
events that stray from the operational baseline. These
anomalies can indicate critical issues—such as faults,
errors, or fraudulent activities—that may lead to de-
graded performance, failures, safety risks, or financial
losses. Pharmaceutical processes, in particular, are
complex and strictly regulated. Anomalies in these
settings can result from equipment malfunctions, en-
vironmental changes, human errors, or variations in
raw material properties, making swift detection essen-
tial for maintaining process integrity. However, de-
tecting anomalies is particularly challenging in batch
operations, which involve dynamic, stage-specific be-
haviors and batch-to-batch variability (see (Majozi,
2009)). An anomaly in one stage might be typi-
cal in another, further complicating detection. Addi-
tionally, batch-to-batch variability—driven by factors
like raw material quality, environmental conditions,
or equipment wear—further obscures the identifica-
tion of subtle anomalies (Mockus et al., 2015).
Over the past decade, various data-driven methods
have been employed for anomaly prediction. Tradi-
tional statistical techniques, such as PCA (Greenacre
et al., 2022) and PLS (Pirouz, 2006), have been
widely used, even though their linear nature lim-
its their ability to capture non-linear interactions in
batch data. Extensions like kPCA (Sch
¨
olkopf et al.,
1997) and non-linear PLS have been developed but
often come with high computational costs. Recent
advances in Machine Learning (ML) and Deep Learn-
ing (DL)—particularly AutoEncoders (AEs) and Re-
current Neural Networks (RNNs) (Aghaee et al.,
2024)—have shown promise in capturing both non-
linear patterns and temporal dependencies in dynamic
systems.
Antonucci, D., Bonanni, D., Palumberi, D., Consolini, L. and Ferrari, G.
Enhancing Pharmaceutical Batch Processes Monitoring with Predictive LSTM-Based Framework.
DOI: 10.5220/0013665500003982
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 22nd International Conference on Informatics in Control, Automation and Robotics (ICINCO 2025) - Volume 1, pages 15-24
ISBN: 978-989-758-770-2; ISSN: 2184-2809
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
15

This paper introduces a robust framework that
combines LSTM and AE methodologies (detailed in
Section 3) for batch process monitoring. It demon-
strates improved performance in managing the com-
plex dynamics of batch process monitoring in com-
parison to traditional approaches (discussed in Sec-
tion 4.1). Furthermore, a customized threshold mech-
anism, based on rolling median and Median Abso-
lute Deviation (MAD) is implemented to enhance
anomaly detection accuracy and reduce false posi-
tives. Notably, the framework also employs an LSTM
regression model to predict future process variables,
which are subsequently fed into the AE to enable pre-
dictive anomaly detection.
Paper Outline
In Section 2, we discuss existing approaches for
anomaly detection in batch processes, including sta-
tistical and ML-based methods, and we outline the
motivation behind our proposed framework. Sec-
tion 3 introduces the architecture, implementation,
and integration of our framework composed by an
LSTM-AE model alongside the LSTM regression
model, designed for both real-time monitoring and
prediction. The training and testing of these models
utilize batch process data sourced from the pharma-
ceutical company GSK (as detailed in Section 3.1).
Section 4 describes the experimental setup, evaluation
metrics, and provides a comparative analysis of our
approach against alternative methods. Finally, Sec-
tion 5 concludes the paper by summarizing key find-
ings, discussing their implications, and suggesting fu-
ture research.
2 LITERATURE REVIEW
Despite the inherent non-linearity of industrial pro-
cesses, PCA remains popular for process modeling
due to its simplicity and ease of use (Russell et al.,
2000). An alternative for batch processes, as shown
in (Jeffy et al., 2018), employs a multi-way PCA tech-
nique by aligning and concatenating batches into an
unfolded 2D matrix, suited for following transforma-
tions. The advantages of PCA in industrial applica-
tions include robust irregularity detection even with
sparse data, scalability for process efficiency, and ease
of interpretation for real-time monitoring and control.
Transitioning from linear to non-linear methods
introduces challenges in deploying optimized, inter-
pretable models for fault detection in highly non-
linear systems. Non-linear techniques offer enhanced
modeling capabilities but often demand greater com-
putational resources and larger training datasets. For
instance, Kernel PCA (kPCA)—presented in (Choi
et al., 2005)—addresses linear PCA’s limitations by
modeling complex non-linear relationships. How-
ever, kPCA requires significant computational re-
sources due to the need to compute and store a kernel
matrix that scales quadratically with the number of
samples, and its high-dimensional feature space can
complicate interpretation.
Building on these non-linear techniques, methods
such as one-class Support Vector Machine (SVM)
(Li et al., 2003) and Support Vector Data Descrip-
tion (SVDD) (Zhao et al., 2013) have been adopted to
enhance anomaly detection. Both these methods use
kernel functions to map data into a high-dimensional
space based solely on fault-free samples, with a key
distinction in the boundary: one-class SVM con-
structs a hyperplane while SVDD defines a hyper-
sphere. In (Inoue et al., 2017), one-class SVM is
compared with Deep Neural Networks (DNNs) for
detecting anomalies in the context of a water treat-
ment plant. The study demonstrates that while both
methods can be effective, each has its own trade-offs
in terms of false positives and sensitivity to different
fault scenarios. In (Kilickaya et al., 2024), a deep
variant of SVDD is developed to detect anomalies
in industrial machinery based on audio signals. By
mapping log-Mel spectrograms into a feature space
and learning a compact hypersphere that encloses
normal behavior, the method achieves excellent de-
tection performance under various noise conditions.
These studies not only demonstrate how one-class
SVM and SVDD can effectively model normal op-
erational states and identify deviations as anomalies
across various types of industrial data, but they also
pave the way for the adoption of kernel-based and DL
approaches in anomaly detection and dimensionality
reduction tasks.
In the past decade, AEs have emerged as one
of the most effective methods for anomaly detection
in non-linear systems due to their ability to learn
compact and expressive representations of complex
data (Sakurada and Yairi, 2014). By reconstruct-
ing the underlying data distribution through a de-
coder, AE-based models can inherently detect devi-
ations from learned patterns—a feature particularly
valuable in batch operations. Studies such as (Said El-
sayed et al., 2020) and (Nguyen et al., 2021) have
demonstrated the potential of AE-based approaches
to enhance fault detection and process monitoring.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
16

Statement of Contribution
AEs serve two main functions: (I) reconstruction-
based detection and (II) prediction (Liu et al., 2023).
In this work, we introduce a framework that com-
bines an LSTM-AE for reconstruction-based detec-
tion with a separate LSTM regression model for vari-
able prediction. The models are trained on a batched
dataset with variable batch lengths, reorganized into
a two-dimensional matrix that preserves the tempo-
ral structure without using interpolation or padding.
This approach tackles the challenges posed by non-
linear dynamics, high dimensionality, and temporal
dependencies in batch data. Although metrics such as
Hotelling T
2
and Squared Prediction Error (SPE) are
used for outlier detection in linear models (Zeng et al.,
2019), Hotelling T
2
is rarely applied with AEs be-
cause its assumptions—linear relationships, Gaussian
latent distributions, and a well-defined covariance ma-
trix—do not hold in DNNs. Therefore, we utilize
a non-parametric threshold computed using a rolling
median and rolling MAD for more reliable anomaly
detection.
Overall, our framework is capable of: (I) achiev-
ing robust reconstruction by emphasizing key fea-
tures while filtering out noise; (II) implementing an
anomaly detection mechanism that improve the detec-
tion of anomalies and deterioration over time and re-
duces false positives; and (III) capturing temporal de-
pendencies and long-term patterns by predicting pro-
cess variables.
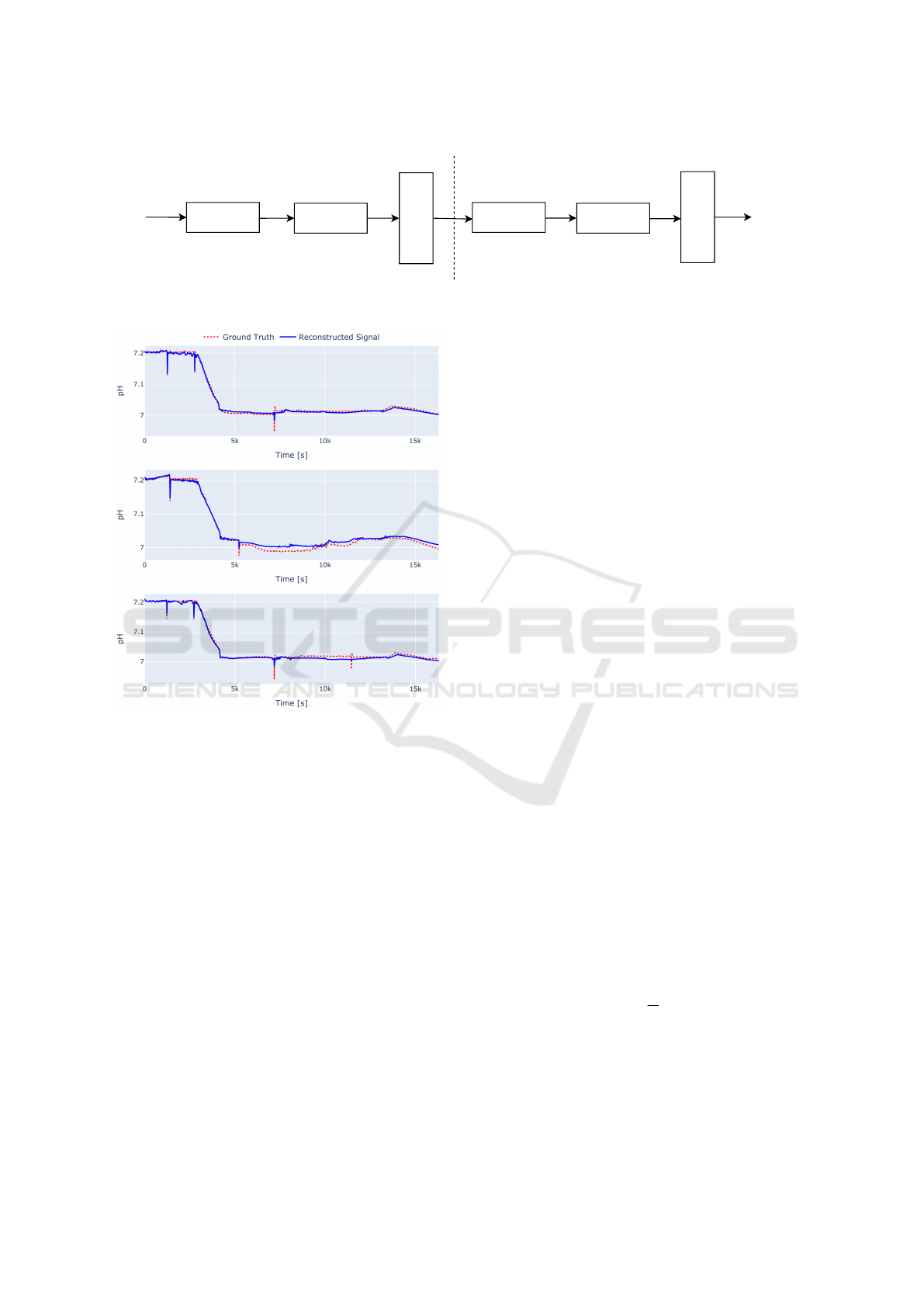
3 PROPOSED MODEL
This section presents our framework for anomaly de-
tection and prediction in batch processes, detailing the
data preprocessing steps and overall data flow (see
Figure 1). The framework starts with raw data, which
is initially standardized using a scaling method. The
data then proceeds through two training phases: one
for the LSTM regression model and another for the
LSTM-AE. For the regression model, data is format-
ted with past and future steps to accurately forecast
sequences of points. For the AE, the reconstructed
output is subsequently evaluated against a threshold
to detect anomalies.
3.1 Data Architecture
The dataset for this study comes from a GSK man-
ufacturing process that produces proteins for a bio-
logic drug. In this process, protein cells are culti-
vated in large bioreactors under precisely controlled
Raw Data
Standard Scaling
Input and
Output Step
Setup
Reconstruction via AE
Prediction
via LSTM model
Forecasting
Reconstruction Error
Evaluation
Anomaly Detection
via rolling threshold
Figure 1: Data flow of both prediction and reconstruction
phases.
conditions—such as pressure, pH, and oxygen lev-
els—to ensure optimal cell growth. Once the cells
produce sufficient proteins, they are extracted, puri-
fied through a series of filtration and chromatogra-
phy steps to eliminate impurities, and then rigorously
tested for quality and safety. Each variable must oper-
ate within its designated Normal Operating Condition
(NOC) to maintain the process’s integrity. A prelim-
inary variable selection, conducted by the company,
has identified critical process variables—referred to
as dynamic variables—for monitoring. These include
measurements from pH sensor and controller, Dis-
solved Oxygen sensor and controller, Vessel Weight,
Vessel Pressure, and levels of Air, CO
2
, O
2
, and N
2
,
making a total of 10 key variables. Given the multi-
variate analysis and prediction, the pH signal (shown
in Figure 2) was chosen as the reference signal since
it exhibits the highest variance among all signals.
Figure 2: Representation of pH sensor readings across dif-
ferent batches, with varying signal durations.
The data is structured in batches, with each batch
representing a distinct production cycle and captur-
ing time series data from multiple sensors, with sam-
pling period equal to 5 minutes. Although each
Enhancing Pharmaceutical Batch Processes Monitoring with Predictive LSTM-Based Framework
17
batch follows a similar pattern, subtle variations ex-
ist, requiring the model to detect anomalies by dis-
cerning these differences. The dataset comprises 14
training batches and 6 test batches, all adhering to
the process’s NOCs. As noted earlier, each batch
terminates upon reaching the required protein quan-
tity, resulting in variable batch lengths. Aligning
these batches is challenging, often requiring the in-
troduction of artificial sequences of points to stan-
dardize the lengths. However, this process can dis-
tort the original data distribution, introducing more
noise or misleading patterns that may compromise
the model’s ability to learn meaningful representa-
tions and, ultimately, reduce the reliability of anomaly
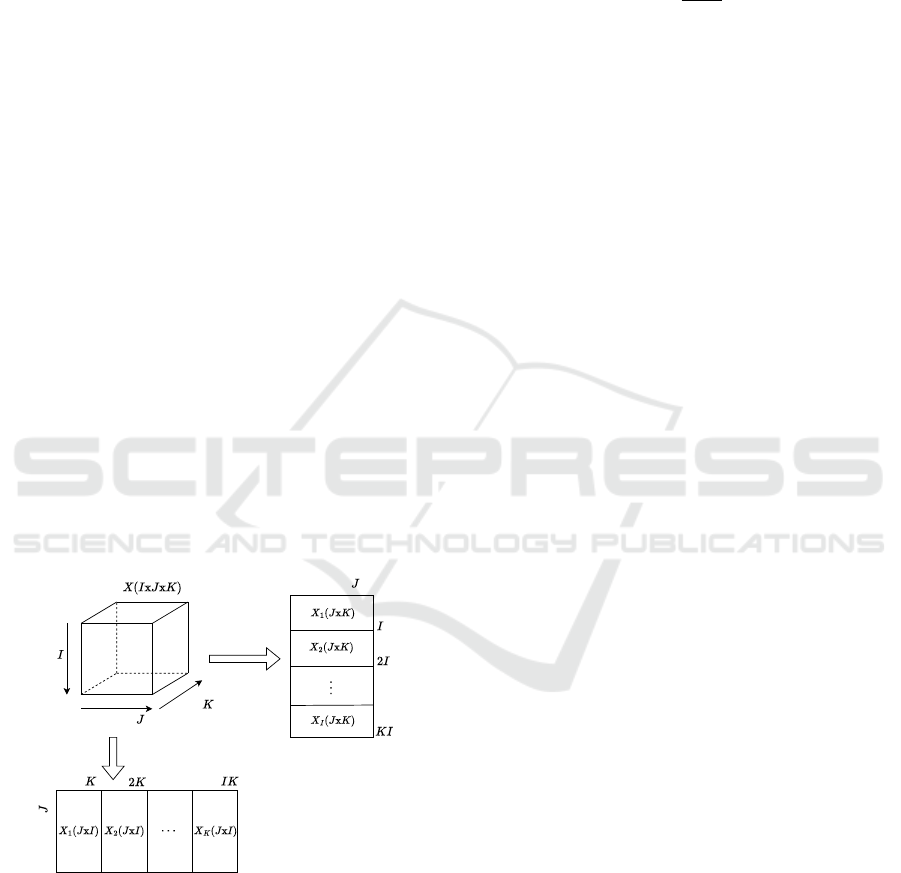
detection. To address this issue, we can employ an
unfolding technique commonly used in PCA appli-
cations (Lee et al., 2004). This approach transforms
a 3D data matrix (batches I × time steps K × vari-
ables J) into a 2D matrix ([batches I × time steps K]
× variables J), preserving the temporal dependencies
within each batch while enabling cross-batch anal-
ysis to detect trends or anomalies. By using this
method, the model can effectively process both tem-
poral and batch-level patterns, thus enhancing pat-
tern recognition and anomaly detection. As illustrated
in Figure 3, batch-wise unfolding—where variable
differences between consecutive time steps are ana-
lyzed—can only be applied to batches of equal length.
In contrast, variable-wise unfolding highlights inter-
batch patterns, helping to preserve and reveal devia-
tions across batches.
Batch
Variables
Time
Variable-wise
unfolding
Variables
Batch-wise
unfolding
Variables
Figure 3: Unfolding approaches for batch processes.
3.2 Data Preprocessing
To avoid an unbalanced training phase, appropriate
data preprocessing is required. In this work, the
only required preprocessing step is feature scaling
using StandardScaler, as the dataset already con-
sists of pre-selected critical process sensors, ensur-
ing that only the most relevant features are included.
StandardScaler standardizes the data by subtract-
ing the mean and scaling to unit variance, placing all
features on a comparable scale. The transformation is
defined as:
z =
x −µ
σ
(1)
where x represents the original feature signal, µ is the
mean, and σ is the variance. This standardization
prevents features with different scales or units from
disproportionately influencing the model, thereby im-
proving training convergence and enhancing result in-
terpretability (Ahsan et al., 2021).
3.3 AutoEncoder (AE)
The AE is an unsupervised, feed-forward neural net-
work that consists of two main components: an en-
coder and a decoder. The encoder compresses high-
dimensional input data into a lower-dimensional la-
tent space, effectively extracting the most relevant in-
formation. The decoder then reconstructs the original
data from this compact representation, yielding a sim-
ilar version of the input data. The model is trained to
minimize reconstruction error, which serves as a mea-
sure of data fidelity. Additionally, the size of the latent
space plays a crucial role in the performance of AEs,
as more aggressive compression can lead to a greater
loss of information.
During the anomaly detection phase, the AE eval-
uates both actual and predicted data points. It con-
tinuously monitors reconstruction errors: deviations
that exceed an established threshold are flagged as
potential anomalies. Figure 4 illustrates the proposed
model implementation, with the hidden layers and ac-
tivation functions defined following the optimization
phase (detailed in Section 3.5). Figure 5 demonstrates
that the model accurately reconstructs the original sig-
nals with overall minimal reconstruction error. How-
ever, the error increases in regions where the model
struggles to capture rapid variations—such as infre-
quent peaks or spikes— or sequence variations that
were not common in the training batches.
3.4 Long Short-Term Memory (LSTM)
Regression Model
LSTM networks are a specialized type of RNN well-
suited for modeling sequence data, including time-
series. They are designed to overcome the vanishing
and exploding gradient problems in traditional RNNs
(Noh, 2021), enabling the learning of long-range tem-
poral patterns. As a result, LSTMs have become one
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
18
Dense
Output (1, J)
Encoder
Decoder
LSTM Layer
Units: 176
Activation Function: tanh
Dropout rate: 10%
Units: 88
Activation Function: tanh
Dropout rate: 10%
Dense
LSTM Layer
LSTM Layer
LSTM Layer
Units: 44
Activation Function: tanh
Dropout rate: 10%
Units: 176
Activation Function: tanh
Dropout rate: 10%
Latent dim: 48
Figure 4: Autoencoder structure.
Figure 5: Comparison of AE’s reconstruction ability of dif-
ferent pH signals.
of the most popular and effective RNN architecture
for time-series forecasting (Torres et al., 2021). Nu-
merous studies have adopted LSTM-based models to
predict time-dependent data, demonstrating robust re-
sults across diverse application domains (Kong et al.,
2024).
In our framework, the dataset is also fed into the
LSTM model. With its inherent capability to capture
long-term dependencies, the model learns a mapping
from sequences of past observations (inputs) to a con-
tinuous target variable (output). Traditional ML mod-
els often do not support multi-output prediction, since
they are optimized and designed for one-target case.
Input and output lags can be particularly beneficial
for batch processes, where understanding both recent
changes and long-term trends is critical for monitor-
ing and control.
3.5 Parameter Optimization
The performance of Neural Network (NN) models
hinges on their architecture and hyperparameters. To
find the best optimal set of parameters, HyperParam-
eter Optimization (HPO) is essential. Bayesan Op-
timization (BO) is a Sequential Model-Based Opti-
mization (SMBO) technique well-suited for tuning
expensive black-box functions, such as those encoun-
tered in DL. In BO, a surrogate model—often a
Gaussian Process (GP)—is used to approximate the
true objective function. Since evaluating the objec-
tive function (for instance, training an ML model) is
resource-intensive, the surrogate model significantly
reduces computational costs by providing an efficient
estimation. BO excels in exploring complex, high-
dimensional parameter spaces by effectively balanc-
ing exploration and exploitation (Wu et al., 2019).
These benefits are particularly evident when com-
pared to traditional methods like grid search and
random search. Grid search becomes computation-
ally prohibitive as the number of hyperparameters
increases due to exponential growth in evaluations,
while random search can inefficiently allocate re-
sources by sampling suboptimal regions without fo-
cusing on promising configurations. The reconstruc-
tion capability of the AE and the prediction accuracy
of the LSTM model are optimized using BO, using
GP as the surrogate model. The objective is to mini-
mize the Mean Squared Error (MSE) between the in-
put data and the target output—the AE strives to re-
produce the input data accurately and the LSTM aims
at forecasting future data points effectively. Formally,
the optimization problem is defined as follows:
θ
⋆
= arg min
θ
f (θ) (2)
f (θ) = MSE =
1
N
N
∑
i=1
∥x
i
− ˆx
i
∥
2
(3)
where: f (θ) is the objective function to be minimized;
θ is the hyperparameter configuration vector; x
i
and
ˆx
i
represent the ground truth and reconstructed val-
ues for each sample i; and N is the total number of
samples (with each sample corresponding to a set of
Enhancing Pharmaceutical Batch Processes Monitoring with Predictive LSTM-Based Framework
19

sensor readings). The optimal configuration θ
⋆
is the
one that yields the lowest observed objective value.
To approximate the objective function, the following
GP surrogate model is employed:
ˆ
f
n
(θ) ∼ GP
m(θ), k(θ,θ
′
)
(4)
where: n is the current optimization; m(θ) = 0 (nor-
malized data) is the mean function; and the covariance
function is defined as:
k(θ, θ
′
) = σ
2
1 +
√
5r
ℓ
+
5r
2
3ℓ
2
!
exp
−
√
5r
ℓ
!
(5)
where: r = ∥θ −θ
′
∥; v > 0 is the smoothness param-
eter (normally v = 2.5); ℓ is the length-scale param-
eter, which scales the Euclidean distance r; and σ is
the variance. Once the surrogate model provides an
estimate, a new set of hyperparameters is chosen to
further minimize the objective function. This selec-
tion is guided by an acquisition function, typically the
Expected Improvement (EI) function, defined as:
EI(θ) = E
max
0, f
best
−
ˆ
f
n
(θ)
(6)
where f
best
≜ min
i=1,...,n
f (θ
i
) is the best observed value
of the objective function up to the current iteration. In
this study, the following hyperparameters were opti-
mized, with the MSE as the loss function.
• Model Depth: determines the number of layers
of the model.
• Units per Layer: specifies the number of neurons
in each layer.
• Activation Function: defines the transformation
applied at each layer.
• Learning Rate: sets the step size for the opti-
mization algorithm.
• Latent Dimension: specifies the number of neu-
rons in the encoder’s final layer, defining the size
of the latent space into which the input is mapped.
The optimal hyperparameter configuration for the
training dataset is presented in Figure 4, with learning
rate equal to 8.6e
−4
. This configuration enables the
AE to achieve efficient performance as described in
Section 4.2.
3.6 Threshold Computation
In unsupervised anomaly detection models (e.g., au-
toencoders), selecting an appropriate threshold for the
reconstruction error is critical to distinguish normal
variations from true anomalies. One straightforward
strategy is to define the anomaly cutoff at a high
percentile of the reconstruction error distribution ob-
tained from training data. This approach ensures that
only a small fraction (e.g., 1%) of normal data would
be mistakenly classified as anomalies by design. This
should prioritize catching extreme outliers while lim-
iting false alarms (Sabzehi and Rollins, 2024). For
multivariate anomaly scoring (or when considering
the vector of reconstruction errors across multiple fea-
tures), thresholding can be based on the Mahalanobis
Distance (MD) (Ghorbani, 2019). The MD measures
how far a point is from the center of a distribution
while accounting for the covariance structure of the
data. The Mahalanobis thresholding approach has the
advantage of capturing correlations among variables
(or error components), making it more sensitive to
unusual combinations of feature values that univari-
ate methods might miss. However, it assumes a rea-
sonably well-estimated covariance matrix; in high di-
mensions or with limited data, robust covariance esti-
mation or dimensionality reduction may be necessary
to apply this method effectively.
In this study, we employ an adaptive threshold
technique based on rolling median and MAD of the
reconstruction error. The rolling median serves as a
local baseline of “normal” behavior, while the rolling
MAD provides a scale of typical variability in that pe-
riod. We then flag a data point as anomalous if its
reconstruction error deviates from the current median
by more than a chosen factor times the MAD. In other
words, the threshold at time t is defined as:
M
t
= median{x
j
| j ∈W (t)}
MAD
t
= median{|x
j
−M
t
| | j ∈W (t)}
τ
t
= M
t
+ k ×MAD
t
,
(7)
where: W (t) denotes the set of indices within the
rolling window at time t; and k is a scaling factor
that adjusts the threshold to suit the dataset’s specific
requirements. This rolling median/MAD approach
yields a time-varying threshold that can adapt to grad-
ual shifts or trends in the data while still being resis-
tant to short-term spikes. It provides a simple, non-
parametric way to detect deviations that are extremes
with respect to local normal variations by carefully
setting the scaling factor and the window size based
on data distribution. For our dataset: k is set to 10 to
catch anomalies that are not mistaken for new normal
observations, caused by frequent spikes in the train-
ing data, which may lead to increased reconstruction
error; and the length of W equal to 30 to account for
local variations.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
20

3.7 Evaluation Metrics
To evaluate the performance of the proposed model,
we utilize the following two metrics.
• Mean Squared Error (MSE): mainly used in the
optimization and training phase, it measures the
average squared difference between the predicted
values ( ˆy
i
) and the true values (y
i
). It can be ex-
pressed as:
MSE =
1
N
N
∑
i=1
(y
i
− ˆy
i
)
2
(8)
where N is the number of samples.
• Area Under the Curve Receiver Operating
Characteristic (AUCROC): it represents the
model’s ability to distinguish between positive
and negative classes. The ROC curve plots the
True Positive Rate (TPR) against the False Posi-
tive Rate (FPR) at various thresholds. The AUC
is calculated as:
AUC =
Z
1
0
TPRd(FPR) (9)
where:
TPR =
TP
TP + FN
(True Positive Rate)
FPR =
FP
FP + TN
(False Positive Rate)
(10)
The AUCROC is a single scalar value ranging
from 0 to 1, where 1 indicates a perfect distinc-
tion between normal and anomaly points.
These metrics, together, provide a comprehensive
evaluation of the model’s accuracy and its ability to
explain the variance in the data, as shown in Sec-
tion 4.1.
4 RESULTS
In order to provide an overall performance compar-
ison between our proposed AE and both traditional
and recent approaches, we leverage ADBench (Han
et al., 2022), a comprehensive public benchmark for
anomaly detection. ADBench evaluates the perfor-
mance of 30 anomaly detection algorithms, of which
14 are unsupervised, across 57 datasets, encompass-
ing a wide variety of real-world and synthetic scenar-
ios. In this benchmark, anomalies are simulated via
four distinct mechanisms: (I) local anomalies, which
deviate from the patterns of their immediate neigh-
borhoods; (II) global anomalies, generated by sam-
pling from a uniform distribution; (III) dependency
anomalies, where the natural correlations among in-
put features are deliberately disrupted; and (IV) clus-
tered anomalies, in which anomalous points occur in
concentrated groups. This setup allows for a thorough
evaluation of model performance under diverse condi-
tions, offering valuable insights of anomaly detection
capabilities.
4.1 Anomaly Detection with Generic
Dataset
As illustrated in Table 1, the average AUCROC
scores for various unsupervised models—evaluated
on datasets characterized by distinct anomaly
types—demonstrate that our approach consistently
delivers robust results even without specialized tun-
ing. Moreover, further performance improvements
are expected following HPO. For instance, while
models like KNN excel at detecting independent
anomalies and PCA proves effective for clustered
anomalies, both may struggle when confronted with
complex, interrelated anomaly patterns.
4.2 Anomaly Detection with GSK
Dataset
To assess ADBench’s models using our dataset, syn-
thetic anomalies must be incorporated into the test set
since the original data contains no outliers and can-
not be directly imported into the benchmark without
anomalies. Specifically, for each synthetic anomaly,
we randomly select one feature and one time step,
and inject anomalies corresponding to 1% of the test
data size. At the chosen time step, a spike is in-
troduced—its magnitude is determined by the data’s
standard deviation and scaled by a predefined deteri-
oration factor. Table 2 shows AUCROC score of each
model with the custom dataset.
4.3 Batch Prediction & Reconstruction
Based on the data flow depicted in Figure 1, data
points are analyzed in two distinct approaches: (I)
prediction followed by detection, and (II) real-time
detection. For prediction, the window corresponding
to each input lag is fed into the LSTM model, which
then produces the subsequent outputs, defined by the
output lag. To analyze various combinations of input
and output values, a grid search is performed over a
range of potential input-output lag pairs, depending
on the sampling time of 5 minutes. For each pair, a
BO optimization is carried out to facilitate a compar-
ative evaluation of the results. By looking at Table 3,
Enhancing Pharmaceutical Batch Processes Monitoring with Predictive LSTM-Based Framework
21
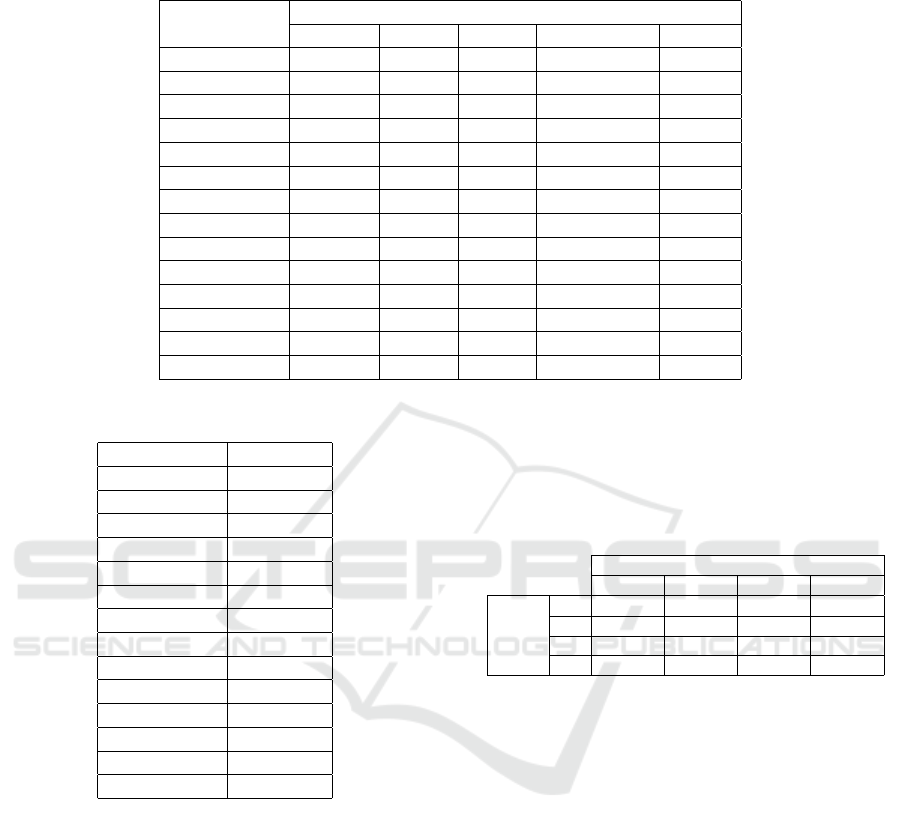
Table 1: Average AUCROC evaluated on 57 datasets across five anomaly types: Default, Local, Global, Dependency, and
Cluster. For each type of anomaly, the best value is highlighted.
Model
Type of Anomaly
Original Local Global Dependency Cluster
IForest 0.7349 0.8859 0.9973 0.7820 0.9680
OCSVM 0.6922 0.8618 0.9871 0.6238 0.9569
CBLOF 0.7396 0.8918 0.9970 0.8357 0.8769
COF 0.6437 0.9065 0.9493 0.8877 0.5211
COPOD 0.7177 0.8557 0.9907 0.6065 0.9681
ECOD 0.7187 0.8785 0.9908 0.5950 0.9447
HBOS 0.7122 0.8527 0.9931 0.5982 0.9668
KNN 0.7058 0.9117 0.9991 0.8959 0.8339
LOF 0.6384 0.9359 0.9189 0.8814 0.4446
PCA 0.7194 0.8662 0.9933 0.6288 0.9782
SOD 0.6880 0.8703 0.9889 0.8940 0.7526
DeepSVDD 0.5612 0.6142 0.7507 0.6133 0.5652
DAGMM 0.6277 0.7927 0.9164 0.6526 0.9354
Proposed AE 0.7242 0.8968 0.9867 0.8984 0.8586
Table 2: AUCROC score with GSK batch dataset.
Method AUCROC
IForest 0.7555
OCSVM 0.6957
CBLOF 0.9107
COF 0.9581
COPOD 0.6721
ECOD 0.6985
HBOS 0.6643
KNN 0.9766
LOF 0.9772
PCA 0.6702
SOD 0.8932
DeepSVDD 0.6297
DAGMM 0.6570
Proposed AE 0.9844
it is evident that the error increases as the output lag
grows with a fixed input lag, caused by the increas-
ing number of predictions and inherently difficulty of
multi-point prediction. Although extending the input
history does not linearly enhance the model’s learn-
ing capacity, our findings indicate that a 30-minute in-
put history (six data points) is sufficient to forecast 15
minutes ahead (three data points). In contrast, predict-
ing 1 hour (twelve data points) accurately requires an
input history of 1 hour and 30 minutes (eighteen data
points). Figure 6 demonstrates that accuracy drops as
additional outputs are predicted, with a notable drop
in performance after 30 minutes, after which the pre-
dictions tend to become stationary. Moreover, Fig-
ure 7 shows the reconstructed pH signal from a 5-
minute prediction step along with its threshold eval-
uation. Notably, the average AUCROC across the test
set with synthetic anomalies is 0.8040, 0.5541, and
0.5507 for the rolling threshold, percentile, and MD
methods, respectively.
Table 3: Batch prediction MSE on test data based on input
and output lags.
Output Predictions
1 3 6 12
Input
Lag
6 0.0036 0.0061 0.0099 0.0209
12 0.0033 0.0067 0.0098 0.0211
18 0.0033 0.0063 0.0094 0.0191
24 0.0033 0.0075 0.0089 0.0203
5 CONCLUSIONS
In this study, we introduced an anomaly detection
approach that leverages an LSTM-AE for real-time
monitoring in batch processes. The proposed frame-
work addresses the challenges of non-linear dynam-
ics, high dimensionality, and temporal dependencies
by using reconstruction error-based detection with a
rolling threshold. This method robustly preserves es-
sential information while reducing false positives and
detecting gradual deterioration. Validated in real-
world scenarios, the LSTM-AE shows promise as
an alternative to traditional and ML approaches for
identifying subtle, complex anomalies in industrial
batch processes. Furthermore, a NN model, based
on LSTM layers, is integrated to forecast future data
points by analyzing both historical trends and antic-
ipated future steps, providing an accurate prediction
of at least 15 minutes ahead. The predictions are then
fed into the LSTM-AE, further enhancing its abil-
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
22

Figure 6: Predicted variables across 12 output steps (1 hour)
with 1 hour and 30 minutes of input history.
ity to anticipate deviations. This work underscores
the potential of DL techniques to revolutionize pro-
cess monitoring and anomaly detection with advanced
predictive capabilities. Future research could explore
latent space analysis for improved anomaly predic-
tion, incremental learning with real-time data, and
broader deployment across various processes by an-
alyzing critical process variables. Finally, this frame-
work may offer valuable insights in real-time indus-
trial environments into its operational efficiency and
scalability, especially when real faults or anomalies
are provided to increase model’s knowledge, tweak-
ing the threshold accordingly.
ACKNOWLEDGEMENTS
This work is based on a project funded by: (I) the
European Union – Next Generation Eu - under the
National Recovery and Resilience Plan (NRRP), Mis-
sion 4 Component 2 Investment 3.3 - Decree No. 352
(09th April 2022) of Italian Ministry of University
and Research - Concession Decree No. 2153 (28th
December 2022) of the Italian Ministry of Univer-
(a)
(b)
Figure 7: (a) Comparison of selected threshold mecha-
nism between predicted pH signal and its reconstruction
with synthetic anomalies; (b) reconstruction error with the
rolling threshold.
sity and Research, Project code D93D22001390001,
within the Italian National Program PhD Programme
in Autonomous Systems (DAuSy); and (II) Glaxo-
SmithKline Manufacturing S.p.a.
CONFLICT OF INTEREST
Two of the authors are employees of the GSK group
of companies. This was undertaken at the request of
and sponsored by GlaxoSmithKline Biologicals SA.
The remaining authors declare that they have no com-
peting interests.
REFERENCES
Aghaee, M., Mishra, A., Krau, S., Tamer, I. M., and Bud-
man, H. (2024). Artificial intelligence applications for
fault detection and diagnosis in pharmaceutical bio-
processes: a review. Current Opinion in Chemical
Engineering, 44:101025.
Enhancing Pharmaceutical Batch Processes Monitoring with Predictive LSTM-Based Framework
23

Ahsan, M. M., Mahmud, M. P., Saha, P. K., Gupta, K. D.,
and Siddique, Z. (2021). Effect of data scaling meth-
ods on machine learning algorithms and model perfor-
mance. Technologies, 9(3):52.
Choi, S. W., Lee, C., Lee, J.-M., Park, J. H., and Lee, I.-B.
(2005). Fault detection and identification of nonlin-
ear processes based on kernel pca. Chemometrics and
intelligent laboratory systems, 75(1):55–67.
Ghorbani, H. (2019). Mahalanobis distance and its applica-
tion for detecting multivariate outliers. Facta Univer-
sitatis, Series: Mathematics and Informatics, pages
583–595.
Greenacre, M., Groenen, P. J., Hastie, T., d’Enza, A. I.,
Markos, A., and Tuzhilina, E. (2022). Principal com-
ponent analysis. Nature Reviews Methods Primers,
2(1):100.
Han, S., Hu, X., Huang, H., Jiang, M., and Zhao, Y. (2022).
Adbench: Anomaly detection benchmark. Advances
in neural information processing systems, 35:32142–
32159.
Inoue, J., Yamagata, Y., Chen, Y., Poskitt, C. M., and Sun,
J. (2017). Anomaly detection for a water treatment
system using unsupervised machine learning. In 2017
IEEE international conference on data mining work-
shops (ICDMW), pages 1058–1065. IEEE.
Jeffy, F., Gugaliya, J. K., and Kariwala, V. (2018). Ap-
plication of multi-way principal component analysis
on batch data. In 2018 UKACC 12th International
Conference on Control (CONTROL), pages 414–419.
IEEE.
Kilickaya, S., Ahishali, M., Celebioglu, C., Sohrab, F.,
Eren, L., Ince, T., Askar, M., and Gabbouj, M.
(2024). Audio-based anomaly detection in industrial
machines using deep one-class support vector data de-
scription. arXiv preprint arXiv:2412.10792.
Kong, Y., Wang, Z., Nie, Y., Zhou, T., Zohren, S., Liang,
Y., Sun, P., and Wen, Q. (2024). Unlocking the power
of lstm for long term time series forecasting. arXiv
preprint arXiv:2408.10006.
Lee, J.-M., Yoo, C., and Lee, I.-B. (2004). Fault detection of
batch processes using multiway kernel principal com-
ponent analysis. Computers & chemical engineering,
28(9):1837–1847.
Li, K.-L., Huang, H.-K., Tian, S.-F., and Xu, W. (2003).
Improving one-class svm for anomaly detection. In
Proceedings of the 2003 international conference on
machine learning and cybernetics (IEEE Cat. No.
03EX693), volume 5, pages 3077–3081. IEEE.
Liu, M., Zhu, T., Ye, J., Meng, Q., Sun, L., and Du, B.
(2023). Spatio-temporal autoencoder for traffic flow
prediction. IEEE Transactions on Intelligent Trans-
portation Systems, 24(5):5516–5526.
Majozi, T. (2009). Introduction to batch chemical pro-
cesses. Batch Chemical Process Integration: Anal-
ysis, Synthesis and Optimization, page 1–11.
Mockus, L., Peterson, J. J., Lainez, J. M., and Reklaitis,
G. V. (2015). Batch-to-batch variation: a key com-
ponent for modeling chemical manufacturing pro-
cesses. Organic Process Research & Development,
19(8):908–914.
Nguyen, H. D., Tran, K. P., Thomassey, S., and Hamad,
M. (2021). Forecasting and anomaly detection ap-
proaches using lstm and lstm autoencoder techniques
with the applications in supply chain management.
International Journal of Information Management,
57:102282.
Noh, S.-H. (2021). Analysis of gradient vanishing of
rnns and performance comparison. Information,
12(11):442.
Pirouz, D. M. (2006). An overview of partial least squares.
Available at SSRN 1631359.
Russell, E. L., Chiang, L. H., and Braatz, R. D. (2000).
Fault detection in industrial processes using canon-
ical variate analysis and dynamic principal compo-
nent analysis. Chemometrics and intelligent labora-
tory systems, 51(1):81–93.
Sabzehi, M. and Rollins, P. (2024). Enhancing rover mobil-
ity monitoring: Autoencoder-driven anomaly detec-
tion for curiosity. In 2024 IEEE Aerospace Confer-
ence, pages 1–7. IEEE.
Said Elsayed, M., Le-Khac, N.-A., Dev, S., and Jurcut,
A. D. (2020). Network anomaly detection using lstm
based autoencoder. In Proceedings of the 16th ACM
symposium on QoS and security for wireless and mo-
bile networks, pages 37–45.
Sakurada, M. and Yairi, T. (2014). Anomaly detection
using autoencoders with nonlinear dimensionality re-
duction. In Proceedings of the MLSDA 2014 2nd
workshop on machine learning for sensory data anal-
ysis, pages 4–11.
Sch
¨
olkopf, B., Smola, A., and M
¨
uller, K.-R. (1997). Kernel
principal component analysis. In International con-
ference on artificial neural networks, pages 583–588.
Springer.
Torres, J. F., Hadjout, D., Sebaa, A., Mart
´
ınez-
´
Alvarez, F.,
and Troncoso, A. (2021). Deep learning for time se-
ries forecasting: a survey. Big data, 9(1):3–21.
Wu, J. et al. (2019). Hyperparameter Optimization for Ma-
chine Learning Models Based on Bayesian Optimiza-
tion. Journal of Electronic Science and Technology,
17(1):26–40.
Zeng, L., Long, W., and Li, Y. (2019). A novel method for
gas turbine condition monitoring based on kpca and
analysis of statistics t2 and spe. Processes, 7(3):124.
Zhao, Y., Wang, S., and Xiao, F. (2013). Pattern
recognition-based chillers fault detection method us-
ing support vector data description (svdd). Applied
Energy, 112:1041–1048.
ICINCO 2025 - 22nd International Conference on Informatics in Control, Automation and Robotics
24
