
Scalable Traffic Flow Estimation on Sensorless Roads Using LSTM
and Floating Car Data
Thamires de Souza Oliveira
a
, David Pagano
b
, Salvatore Cavalieri
c
,
Vincenza Torrisi
d
and Giovanni Calabró
e
Department of Electrical Electronic and Computer Engineering, University of Catania, Viale A.Doria n.6, Catania, Italy
Keywords: Traffic Flow Estimation, Floating Car Data, Machine Learning, Long Short-Term Memory, Urban Mobility.
Abstract: Urban traffic monitoring is crucial for mobility, but the implementation of fixed sensors is costly and leads to
restricted coverage. Floating Car Data (FCD) is emerging as an option, but its low penetration makes accurate
traffic flow estimation difficult. This research proposes a Long Short-Term Memory (LSTM) model to scale
FCD-based traffic estimates by learning flow patterns from routes with existing sensors. The model is trained
with data from the most correlated sensors, but never the same one used for testing. The model identifies flow
patterns from the available sensors and applies them to related paths. The findings indicate that the strategy
is effective on routes with consistent flow but has limitations in regions with high traffic variability. This
work contributes to the advancement of FCD scalability methods, expanding the coverage of urban traffic
estimation without the need for new infrastructure.
1 INTRODUCTION
As the population of urban areas continues to increase
across the world, cities and municipalities are
showing a growing interest in better leveraging
technology to manage their urban area transportation
networks more effectively. With the advent and
acceleration of the Internet of Things (IoT), traffic
management organizations can deploy fixed based
sensors providing them with real-time traffic data
such as vehicle speeds and counts for a given road
segment or route. Unfortunately, when using
traditional closed-loop technologies the cost to
deploy physical traffic monitoring devices across an
entire urban area comes at a significant cost. This has
led traffic managers to seek alternative, lower-cost
solutions; however, even when using lower-cost
sensor technologies for road traffic monitoring as
explored in (Bernas et al., 2018), the cost to deploy
and maintain the large number of devices needed to
fully cover an entire network can remain substantial.
As a result, many regions are facing the challenge of
having incomplete traffic data.
a
https://orcid.org/0009-0003-3868-7610
b
https://orcid.org/0009-0001-4798-1470
c
https://orcid.org/0000-0001-9077-3688
d
https://orcid.org/0000-0001-9332-4212
e
https://orcid.org/0000-0002-4232-8026
The use of Floating Car Data (FCD), which
involves the collection of anonymised real-time data
from GPS-enabled devices used by road users, has
emerged as a promising tool for applications such as
real-time traffic monitoring, travel time estimation,
and traffic flow prediction (Houbraken et al., 2018).
By integrating FCD with data from traditional road
sensing device data, traffic conditions can also be
estimated in areas lacking sensor coverage. However,
a notable limitation of FCD is that it represents only
a sample of the total traffic volume, as data collection
depends on users of specific platforms (e.g., TomTom
or Google). To solve this, scaling techniques are
employed to adjust the FCD data to reflect the actual
traffic flow. Due to the complexity and non-linearity
of this process, standard modelling techniques often
do not perform well enough, and Machine Learning
(ML) methodologies offer a practical solution to
effectively capture intricate patterns within the data.
The aim of this paper is to analyse the
effectiveness of using a specific approach that can be
used to scale FCD data on sensorless roads allowing
traffic management organizations to have a
Oliveira, T. S., Pagano, D., Cavalieri, S., Torrisi, V., Calabró and G.
Scalable Traffic Flow Estimation on Sensorless Roads Using LSTM and Floating Car Data.
DOI: 10.5220/0013647200003967
In Proceedings of the 14th International Conference on Data Science, Technology and Applications (DATA 2025), pages 223-233
ISBN: 978-989-758-758-0; ISSN: 2184-285X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
223

comprehensive understanding of traffic volumes for
their entire network, even where sensors are not
deployed. The approach specifically analyzed in this
research is the use of a Long Short-Term Memory
(LSTM) machine learning model to scale FCD for
roads without sensor data. In the scenario, each of the
roads where both sensors and FCD are available is
used to train an individual scaling model and then to
test the scaling these models are used to scale data
using only the TomTom data from another router. For
each route the route with the most correlated
TomTom data from the set of training routes is used
to scale the FCD data for the unseen route. This
methodology is also important because it helps to
determine whether training the model with data from
just one sensor, rather than a group of sensors at once,
can achieve effective results while improving
computational efficiency, reducing the complexity in
the training process and allowing the model to be
adapted to the characteristics of each specific road.
2 RELATED WORKS
In the mid-2000s, with the increased use of GPS
enabled mobile phones and vehicles collecting
vehicle location and speed data, researchers began to
evaluate how FCD could be used to support improved
traffic forecasting (De Fabritiis et. Al., 2018).
Initially, traditional statistical models such as
Autoregressive Integrated Moving Average models
(ARIMA), Kalman Filter or basic regression, tree-
based or ensemble machine learning algorithms were
used for traffic flow prediction (Berlotti et al., 2024).
However, over the last several years, as computing
power has increased, big data and machine learning
have become key components in predicting and
managing traffic flows which has led to an increase
in the research focused on using advanced neural
network and deep learning techniques that leverage
FCD for traffic prediction (Mystakidis et al., 2025;
Almukhalfi et al., 2024; Vázquez et al., 2020).
This research paper focuses on using an LSTM
architecture for our FCD data scaling. LSTM is one
of the most used neural network-based algorithms for
time series predictions (Gomes, 2023).
When looking at the use of LSTM for traffic
forecasting, LSTM models have been studied for use
in traffic flow and speed forecasting since 2016
(Duan et al., 2016) while more recent research
indicates a trend towards using hybrid models where
the LSTM architecture is combined with other types
of architectures such as a Convolutional Neural
Network (CNN), ARIMA or regression model such
as in (Wang et al., 2024) or (Wang et al., 2023).
The consideration of correlation between road
segments has occasionally been leveraged for traffic
modelling. For example, the correlation between
routes has been exploited to create road segment
groupings that determine model parameters (Tu et al.,
2021) and the correlation strength between time-
series data from monitoring points has been used to
determine the data sequence length and lag time for
forecasting for specific routes (G. Dai, 2019).
Given that the use of an LSTM model for traffic
prediction has become a common practice, the real
novelty of our approach lies both in how we work to
scale the FCD data for sensorless routes and how we
use the correlation strength of FCD data between
sensor-measured and sensorless routes to determine
which model to use for the scaling, neither of which
appear to be specific topics of current research.
3 RESEARCH METHODOLOGY
The area chosen for the development of this study is
the metropolitan city of Catania, located on the island
of Sicily, Italy. Catania is currently suffering from a
wide range of problems related to poor urban
planning, low levels of investment in mobility and
infrastructure, and an increasing dependence on cars
for travel. These challenges also lead to critical levels
of environmental problems and a sharp decline in the
quality of life of the city's residents (La Greca et al.,
2018). Currently, Catania ranks 83rd out of 107 cities
in the annual ranking for quality of life published by
Sole 24 Ore (Catania Today, 2024). Inevitably, it is
important to develop methodologies that assist in
improving mobility within the city.
The authors are currently involved in a research
project aimed to develop a machine learning model to
predict traffic flows in areas not covered by sensors,
using data from sensors installed on specific routes
and FCD accessible for the entire road network.
As said in the Introduction, a notable limitation of
FCD is that it represents only a sample of the total
traffic volume, as data collection depends on users of
specific platforms (e.g., TomTom or Google). To
solve this, scaling techniques must be applied to
adjust the FCD data to reflect the actual traffic flow.
This paper presents a machine learning model to
establish the relationship between the sensor data,
which covers only a few specific roads but represents
the users on those routes, and the FCD data, which
covers almost the entire city but with a limited
representation of about 5%.
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
224

As previously stated, the primary idea proposed
is to analyze the effectiveness of using a specific
approach designed to scale FCD data in roads where
sensor data may not be available. The method
involves using a LSTM machine learning model to
learn the patterns presented by sensor data in other
routes and use this information to scale the FCD data
for routes that lack sensor information. In this
approach, the model is trained using only data from
one or a maximum of two sensors, and by selecting
those routes whose TomTom data is the most
correlated with the one we want to scale.
The results outlined in this paper will indicate
that the strategy is efficient on routes with consistent
flow and represents a good solution to improve
computational efficiency and training complexity,
providing the capacity to have accurate traffic flow
estimates for routes with defined characteristics, even
if they lack real traffic flow data.
4 DATA SOURCES
This study collects data from three main sources: The
Intelligent Transport System (ITS) of University of
Catania, the TomTom database, which collects FCD
using a network of GPS-enabled devices, and weather
data from https://meteostat.net/it/, which provides
hourly weather data such as temperature,
precipitation, wind speed and direction.
The ITS is managed by the University of Catania
and is able to continuously monitoring, evaluating
and traffic forecasting, traffic conditions in real time,
providing a complete overview of the whole
transportation system. Furthermore, it provides users
with relevant information to help them make
informed decisions regarding route selection (Torrisi
et al., 2018). Data were collected from 21 microwave
traffic counters located throughout the city which
collect essential data including timestamp, traffic
volume, traffic direction, and lane occupancy.
Twelve traffic sensors with data recorded at 5-
minute intervals were selected, considering the period
from October 1, 2022, to December 31, 2022. The
quality of the available data led to the filtering of this
time frame. The majority of the sensors monitor a
single road, recording dynamic traffic patterns that
represent regional traits in a single direction.
However, there are a few cases where sensors are
either positioned on the same road but in different
locations or they monitor traffic in opposite
directions.
The second data set consists of traffic samples
collected by the TomTom database, which receives
FCD through a network of GPS-enabled devices,
such as smartphones, car navigation systems and
vehicles equipped with TomTom's own navigation
system. This system allows the transmission of
information, such as anonymous location and speed
data, to be transmitted to TomTom's servers. The
collected data is aggregated, processed and
distributed, to provide real-time traffic information
over large geographical areas (TomTom, 2025). The
FCD sample analyzed corresponds to the same time
period and road sections monitored by the physical
sensors. It includes data on traffic flow, travel times,
and harmonic average speed, recorded at 1-hour
intervals.
Finally, the weather data, which included hourly
weather-related data such as temperature, pressure,
wind speed and wind direction, was merged with the
combined sensor and FCD dataset.
5 DATA PREPROCESSING
The pre-processing phase of our research consists of
verifying the quality and reliability of both datasets,
as well as managing data standardization, dealing
with outliers and missing data, and ending with the
unification of both datasets.
For the sensor dataset, the roads analyzed were
categorized into three types: single-lane roads, roads
with two lanes in each direction, and two-lane roads
with one lane per direction. Each type of road, due to
its individual characteristics, requires specific pre-
processing steps to better handle the data. For two-
lane roads in the same direction, the vehicle flow for
both lanes was aggregated into a unified time series
for the total traffic flow, while two-lane roads with
one lane per direction required disaggregation into
separate time series to capture different directional
information.
The final sensor names follow a pattern extracted
from the data files. For one-way roads, the zone name
is taken directly from the file. For two-way streets,
the data is split into two directions, and each direction
is given an identifier in the final name, clearly
indicating the direction of traffic. So, the final list of
sensors combines an inherent code from the file, the
street name and, where applicable, the direction of
flow. Here is the list of the final routes/sensors used
in the study:
MT6aSuperstradaCataniaPaterno
MT6bSuperstradaCataniaPaterno
MT7aVialeLorenzoBolanocirconvallazione
MT9ViaSantaSofiaVersoCarubella
MT9ViaSantaSofiaVersoCatania
MT10aViaPassoGravina
Scalable Traffic Flow Estimation on Sensorless Roads Using LSTM and Floating Car Data
225
MT10bViaPassoGravina
MT13ViaNuovaceloVersoCatania
MT13ViaNuovaceloVersoCerza
MT14aVialeGiuseppeLainoVialeEnzoLongo
MT14bVialeGiuseppeLainoVialeEnzoLongo
MT16ViaAccicastello
MT17aSS114VialeAfrica
MT18bViaAFleming
In addition to this processing, one of the sensors
exhibited a different pattern from the others,
recording data at 10-minute intervals instead of the
usual 5-minute periods. To ensure standardization, its
values were adjusted for a 5-minute interval, using the
average of the data within that period.
Like many real-world datasets, the sensor data
contained many missing values and inaccuracies.
These data issues were due to sensor operational
problems or malfunctions that can occur due to road
maintenance or urban greenery issues, which can lead
to temporary obstructions. To handle the missing data
values, we adopted a strategy based on the average of
similar time periods. First, the data were organized by
indexing the timestamp column, then the missing
values were filled with the average of the non-missing
data in the corresponding period within the month,
considering a grouping that combines the normalized
month, day of the week, hour and minutes of the
timestamp. This approach aims to preserve seasonal
patterns and periodic variations, ensuring that the
imputed values have the characteristics and patterns
typical of the analyzed period. Finally, the data were
converted from float to integer, to ensure the
consistency of the data processed.
At the end of the sensor data pre-processing step,
we added to the dataset some categorical variables
based on information provided by the research group
working in the mobility department of the University
of Catania. These variables relate to the physical
characteristics of the roads, such as the number of
lanes, the lane width class and the presence of
parking. In addition, we created new features based
on the Timestamp, these features were: ‘Weekday,
'Day of the month' and 'Time of day'.
In the TomTom data pre-processing phase, we
matched the data to the sensors by mapping the
database route numbers to the associated route/sensor
names. In the TomTom dataset, in addition to the
routes directly corresponding to the roads where the
real data sensors are installed, information was also
included from two roads located before each sensor
road, to represent the inbound traffic flow, as well as
from two roads that receive flows from the same
roads monitored by the sensors, to reflect the
outbounding traffic flow. In the case of the FCD data,
no missing values were found as they come from
multiple sources and undergo additional processing to
smooth out errors. (TomTom, 2021).
To deal with outliers in both datasets, we used the
Interquartile Range (IQR) method, a statistical
technique used to identify outliers by measuring the
spread of the middle 50% of a dataset, specifically the
range between the first quartile (Q1) and the third
quartile (Q3). Two advantages of the IQR method are
its robustness to extreme values and its non-
parametric nature, which allows it to be applied to
datasets without assuming a specific distribution
(Dash et al., 2023).
Finally, the sensor and TomTom datasets were
merged based on the Timestamp and route columns.
To optimize computational efficiency and
visualization, we aggregated the data from 15-minute
intervals into 1-hour periods. The traffic count
columns were renamed to differentiate between
sensor and FCD flow counts, and finally the order of
the columns was rearranged according to a predefined
pattern for data clarity. The pre-processing resulted in
a dataset with the following variables and containing
30.589 observations.
Table 1: Final dataset.
Features Definition T
y
pe
Zone
Region where the sensor
is installed
Categorical
Count FCD
Traffic Flow recorded
with FCD
Numerical
Count sensors Traffic flow recorded in
that senso
r
Numerical
Hour Each hour of the day
Categorical
Weekday Day of the week
Categorical
Day of Month Day of month in a scale
from 1 to 31
Categorical
Time of the
Da
y
Hour of the Day
Categorical
Number of
Lanes
Number of lanes for each
road (1 or 2)
Categorical
Lane Width
Class
Width of the lane (1 for
narrow lanes, 2 for wide
lanes)
Categorical
Parking
Presence
Binary features that
indicate if parking is
p
resent or not
Categorical
Harmonic
Average
S
p
ee
d
Average vehicles speed
Numerical
15
th
percentile
speed
The speed at or below
which 15% of observed
vehicles
Numerical
85
th
percentile
speed
The speed at or below
which 85% of observed
vehicles
Numerical
IN_1
First inbound traffic flow
Numerical
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
226

Table 1: Final dataset(cont.).
IN_2 Second inbound traffic flow Numerical
OUT_2 First outbound traffic flow
Numerical
OUT_2 Second outbound traffic
flow
Numerical
Congestion
Index
Ratio of the 85
th
speed to
free flow s
p
eed
Numerical
Speed Ratio Ratio of the 85th to 15th
p
ercentile spee
d
Numerical
Free Flow
Speed Diff
Difference between free-
flow speed and observed
s
p
ee
d
Numerical
Temperature
(C)
Air temperature in Celsius
degrees
Numerical
Dew Point
Temperature
Temperature at which air
reaches saturation, leading
to condensation
Numerical
Relative
Humidity
Ratio of actual to maximum
possible atmospheric
moisture
Numerical
Rain (mm) Precipitation recorded in
millimeters
Numerical
Wind dir Compass direction from
which the wind originates
Numerical
Wind Speed
(
km/h
)
Magnitude of wind velocity.
Numerical
Pressure
(
hPa
)
Atmospheric pressure in
hecto
p
ascals
Numerical
Coco Weather condition indicator
Categorical
6 FEATURE ENGINEERING
As our dataset contains a large number of features, it
is crucial to assess the degree of impact, positive or
negative, that each of these features has on our model,
as selecting the correct features aims to improve the
quality and accuracy of the algorithm’s results
(Kohonen, 1972).
To ensure an effective selection of features from
our final dataset, different approaches were applied
when working with numerical and categorical
variables. For numerical variables, we applied the
correlation matrix to assess the degree of association
between all variables, eliminating variables that do
not bring a relevant correlation with our target feature
while also removing variables that are correlated with
each other in the model, to avoid information
redundancy (Kent, 2018). Three different methods
were used for categorical variables, (i) Chi-Square
analysis to identify relationships between categorical
variables (Rana et al., 2015), (ii) regression analysis
to explore dependencies between independent and
dependent variables (Alkharusi, 2012), and (iii)
ANOVA to compare means between different groups
(Jaeger, 2008). This multi-method approach allowed
us to evaluate the statistical relevance of each selected
feature.
Finally, to optimize model performance, we
tested the group of chosen models with the three sets
of features to determine which one yielded the best
results.
7 MACHINE LEARNING
ARCHITECTURE AND
EVALUATION
The main goal of this machine learning research was
to perform a series of tests, exploring different
variations of the chosen models, increasing the
complexity and optimizing the parameters, in order to
identify the most effective approach, both to achieve
the final objective and to adapt to the specific type of
data frame used.
It is important to note that all these changes were
made in separate steps and incrementally, with the
results being evaluated after each step. This allowed
for a more detailed and individualised understanding
of the results.
7.1 Training and Test Division
The division of the data into training and testing was
done using an approach that ensured that there was no
overlap between training and testing data. To achieve
this, we used data from one or more roads to train the
model and verified its accuracy by testing it with data
from a new road.
To determine the groups of roads to use, we
implemented a correlation matrix between the routes,
testing the correlation between two different
variables. The first variable was ‘TomTom count’,
with the idea that the FCD counts are able to identify
similarities in the characteristics of a route. The
second variable selected was the ‘85th percentile
speed’, as similar traffic conditions and road
characteristics often result in similar speed patterns.
Correlations between the routes were calculated
using Pearson's correlation coefficient, which
allowed us to quantify the linear relationship between
the variables on each road (Sedgwick, 2012).
All tests were performed using both ‘TomTom
count’ and ‘85th percentile speed’ as the correlation
index alternately. To train the models, we consider
the correlation ranking: for example, if route A had
the highest correlation with route B, we trained the
model on route B’s data and evaluated its
performance on route A. In addition, we tested
Scalable Traffic Flow Estimation on Sensorless Roads Using LSTM and Floating Car Data
227

variations where the training data included the two
most correlated routes.
7.2 Baseline Model: Simple LSTM
Since the LSTM model is one of the most widely used
deep learning methods when working with time series
data, it was chosen as our baseline model for this
investigation. The LSTM is more effective for time-
series tasks than traditional RNNs because it
improves long-term memory retention and mitigates
the vanishing gradient issue. A three-gate
mechanism—input, forget, and output gates, that aids
in capturing, managing, and storing pertinent data
during learning is used for this (Kang, 2017).
The model was implemented using the Keras
library in Python (Keras, 2025), which was integrated
with the TensorFlow library (Tensorflow, 2024), to
build and train the neural network. The data was then
processed using the scikit-learn library (scikit-learn,
2025). We employed the One-Hot Encoding
technique to deal with the categorical variables,
which converts them into numerical representations
that can be used in machine learning models
(Rodríguez et al., 2018).
The temporal sequences were processed by a
single layer of 50 memory units in our initial LSTM
model, which was set up with the default parameters.
A dense layer was used for the final prediction. The
Adaptive Momentum Estimation (Adam) optimizer,
a first-order gradient-based optimization algorithm
for stochastic objective functions, was used to train
this base model. Its running average of the gradient's
first and second moments is used to determine
adaptive learning rates for each parameter (Tato,
2018).
Since the mean square error (MSE) is the most
often used loss function in regression models with a
continuous target variable and an independent
variable representing the features, the model was
configured to use it as the loss function. The mean
squared discrepancies between actual and anticipated
output are used to calculate it (Pandey, 2022).
7.3 Model Architecture Refinements
After working with a simple LSTM as our baseline
model, we made some refinements to the original
model to ensure that it could capture more complex
patterns, improve the generalization capacity of the
LSTM architecture, and mitigate the possibility of
underfitting (Jabbar, 2015).
The first model improvement was to increase the
depth, expanding the number of layers from 1 to 3, in
order to increase the learning ability of the model. In
addition, we also increased the number of units from
50 to 200 per LSTM layer to enhance feature
extraction (Yu et al., 2019).
The subsequent test was a transformation of the
structure of the previous LSTM model architecture by
using a variation that included a bi-directional LSTM
layer instead of a forward only LSTM. A bi-direction
LSTM layer processes the input sequence from both
the forward and backward directions. In other words,
the network has information about the past (from the
forward pass) and the future (from the backward pass)
at any given time step. This can improve accuracy in
situations where context from both directions is
crucial, like language processing and specific time
series data (Kim et al., 2023).
As a final adjustment to the model architecture,
we evaluated the results from adding a dropout layer
after each of the LSTM layers. A dropout layer
stochastically sets to zero the activations of hidden
units during training, effectively breaking co-
adaptation of feature detectors, and the main
advantage is its ability to reduce overfitting by
preventing complex adaptations of feature detections,
that improves the generalization performance of the
model (Wu et al., 2015).
7.4 Hyperparameter Fine-Tuning
For the fine-tuning phase, we developed a specific
LSTM architecture adapted to our dataset, using the
Keras library in Python (Keras, 2025) to improve the
model's performance. Keras provides several
optimization techniques and the one we selected to
use is Random Search. This method tests several
different combinations of hyperparameters to identify
which configuration makes the model perform better.
Based on this process and these results, we fine-tuned
the following parameters: optimizers, loss functions,
epochs and batch sizes.
The random search bases its final results on the
combination that minimizes the MSE, ensuring
reliability through cross-validation, where the dataset
is split into multiple subsets and each subset is used
for testing while others are used for training, ensuring
a good generalization level of the model (Meiying et
al, 2011). In the end, the optimal set of
hyperparameters was identified based on the
performance metrics from the random search process.
7.5 Performance Evaluation
To verify the results of our models, some
performance metrics were used for evaluation. The
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
228
first metric used was the MSE, but for more
comprehensive results, we also used the Mean
Absolute Error (MAE) which represents the average
of the absolute differences between the predicted and
observed values. Additionally, we used the Root
Mean Squared Error (RMSE), a measure of the
standard deviation of the errors and effectively the
square root of the MSE (Hodson, 2022). Because of
its insensitivity to short-term forecasts, though, the
Mean Absolute Percentage of Error (SMAPE) was
adopted as the primary evaluation measure. As in
(Chen et al., 2017) defined, the SMAPE is an
accuracy measure of percentage error; therefore, the
lower the SMAPE, the lower the prediction error.
8 RESULTS AND DISCUSSION
In this section, we present the results of all stages of
our research, from feature analysis to the final model
results, including a final evaluation and interpretation
of the results.
8.1 Optimal Feature Selection
According to the correlation matrix, the feature
‘Count_TomTom’ has a strong positive correlation
with the target variable, ‘IN_1’ also shows a positive
correlation, but to a lesser extent. Other speed-related
features, such as the ‘85th percentile Speed’,
‘Harmonic Average Speed’, and ‘15th percentile
Speed’, display moderate positive correlations, in this
order of strength. The temperature related features
have weak, but positive correlation. The only strong
and negative correlation is with the variable “Free
flow Speed Diff”. Considering this, we performed
some tests with a very reduced number of numerical
variables, keeping only ‘Count_TomTom’, ‘85th
Percentile Speed’, ‘IN_1’ and ‘Free Flow Speed
Diff’.
For the categorical variables, according to the chi-
test, the feature ‘Hour’, ‘Time of the day’, ‘Weekday’
and ‘Parking Presence’ should be retained in the
model. According to the regression analysis, the
features ‘Month’, ‘Time of the day’, ‘Hour’, ‘Number
of Lanes’, ‘Lane Width Class’, ‘Parking Presence’
and ‘coco’ should be maintained in the model, and
according to the ANOVA test, all the categorical
features are valuable and should be kept in the model.
The model tests were carried out with all three groups
of variables to see the difference in the efficiency
between them.
8.2 Sensor Correlation Analysis
In order to separate the training and test data, we
ranked the TomTom data based on Pearson’s
correlation, as mentioned above. The results are
shown in Table 2.
Table 2: Correlation between sensor’s data.
Sensor Most Correlated
Sensor
Correlation
Index
MT6a MT7a 0.96
MT6b MT6a 0.87
MT7a MT16 0.85
MT9Carrubella MT13Cerza 0.85
MT9Catania MT14b 0.83
MT10a MT10b 0.65
MT10b MT13Catania 0.90
MT13Catania MT10b 0.90
MT13Cerza MT16 0.87
MT14a MT6b 0.82
MT14b MT6b 0.64
MT16 MT17a 0.85
MT17a MT16 0.85
MT18b MT10b 0.88
It is important to note that Pearson's correlation
coefficient was used to measure the relationship
between roads, taking into account the speed variable.
This means that the street most correlated with a
particular road, in terms of speed, may not be the
same for another road. This is because Pearson's
coefficient evaluates the linear relationship between
traffic speeds on different streets (Sedgwick, 2012).
Therefore, even if two roads present similar speed
patterns, they may have different correlations when
compared to other roads, depending on factors such
as traffic behaviour at certain times, geometric
characteristics of the road or weather conditions,
which may affect speed differently.
8.3 Hyperparameter Selection
Some changes have been made to our simple LSTM
architecture based on the results of hyperparameter
fine-tuning. According to the results of the grid
search, the changes start with the chosen optimizer,
switching to Root Mean Square Propagation
(RMSprop), which is an alternative to the default
optimizer (Adam), and is often used when the data
has a large variance (Peng et al., 2024). The loss
function is MAE, which is also different from the
default loss function (MSE) of LSTM. The model was
trained using a batch size of 32, which is more typical
Scalable Traffic Flow Estimation on Sensorless Roads Using LSTM and Floating Car Data
229
and effective in many situations than the default value
of 64 and running for 6 epochs (instead of the default
of 10). The purpose of these settings is to optimize the
model for the particular task of time series forecasting
with sensor data.
8.4 Scaling Results
After running the tests with all combinations of
features, model types and correlation index, we
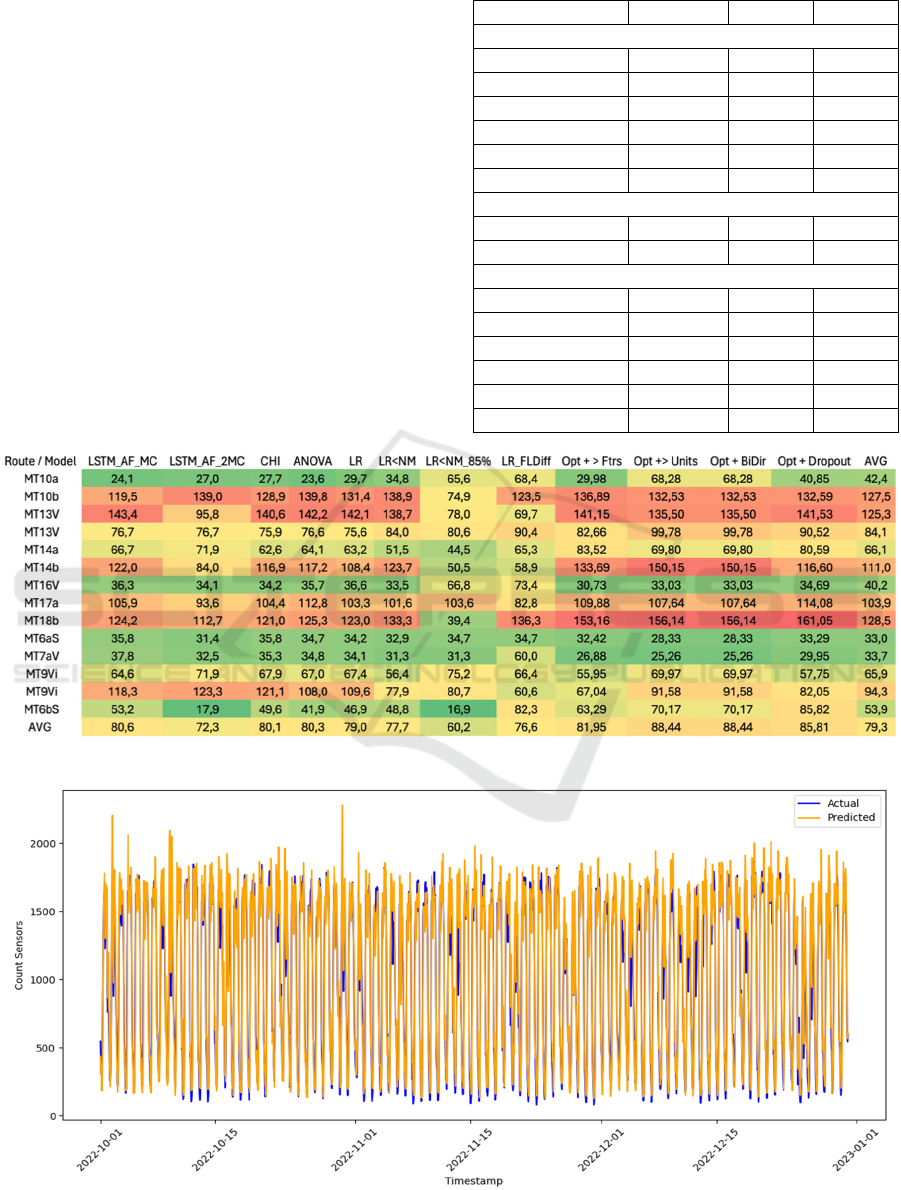
arrived at the results shown in Figure 1. As we can
see, the best results are obtained using the categorical
features determined by Linear Regression, only 4
numerical features. ('Count TomTom’, ‘85th
percentile Speed', 'IN_1' and 'Free Flow Speed Diff'),
optimized hyperparameters, the ‘85th Percentile
Speed’ as correlation index and a Simple LSTM
model. The results of this best model architecture can
be seen more clearly in Table 3, divided into three
groups of results: good, moderate and weak.
Table 3: Results best model architecture.
Route SMAPE MAE RMSE
Good Results
MT6b 16.94 13.90 18.30
MT7a 21.34 25.15 33.43
MT6a 34.71 33.89 42.87
MT18b 39.36 7.48 10.18
MT14a 44.46 70.06 10.91
MT14b 50.47 9.61 12.35
Moderate Results
MT10a 65.64 32.21 38.93
MT16 66.82 57.06 71.23
Weak Results
MT10b 74.89 72.74 77.65
MT9Carrubella 75.20 20.89 25.47
MT13Catania 78.04 13.29 18.87
MT13Cerza 80.59 29.06 38.53
MT9Catania 80.69 9.92 13.40
MT17a 103.56 70.27 83.96
Figure 1: Results of all model architectures.
Figure 2: MT6bSuperstradaCataniaPaterno prediction results.
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
230

For this type of data, the results are classified as
follows: SMAPE less than 50% is considered good,
between 50% and 70% is considered moderate and
above 70% is considered poor. In this way, the
sensors were grouped into three categories, showing
that the model has different performances.
For certain routes, the model is able to predict the
actual traffic flows fairly well, demonstrating its
capability of learning sensor data patterns and scaling
the FCD data with reasonable accuracy, as shown in
Figure 2, which displays the predicted scaled data as
compared to the actual sensor counts for the route
MT6b (MT6bSuperstradaCataniaPaterno) which
achieved the best SMAPE value of 16.94. However,
as can be expected, the performance is not the same
for all sensors leading us to further analyse the route
differences.
8.5 Road Geometry Analysis
The results obtained with the final machine learning
model showed satisfactory performance on some
roads, while on others the performance was moderate
or unsatisfactory. Given this variation, we started an
analysis to investigate possible statistical or
geometric correlations between the characteristics of
the roads and the performance of the model.
We can begin our discussion with a more in-depth
analysis of the best performing sensor, the
MT6bSuperstradaCataniaPaterno, that is located in
one of the main extra-urban arterial roads linking
Catania with the western hinterland, facilitating the
movement of vehicles in a north-westerly direction,
for goods transport and commuting. The road section
consists of two separate carriageways with two lanes
in each direction. It is a high-capacity road with
significant traffic flows, mainly related to commuters
travelling between Catania and the surrounding areas.
Traffic flows tend to be higher in the morning and
evening, with possible slowdowns near the access
junctions to the Catania ring road.
The second-best performing sensor,
MT7aVialeLorenzoBolanocirconvallazione is also
on a dual carriageway, with two lanes in each
direction and, in some sections, a wide central traffic
divider separating the lanes and allowing good traffic
capacity.
Regarding the weaker results, such as those of the
sensors MT13ViaNuovaceloVersoCatania and
MT13ViaNuovaceloVersoCerza, it can be noted that
they are located on a road in the southern part of
Catania that crosses a predominantly residential and
commercial area, serving as a link between different
residential and industrial areas and facilitating access
to the city center. The road has a narrower cross-
section than the main urban arterials analysed so far,
with only one lane in each direction and large side
lay-bys for parking. The presence of frequent
intersections and side entrances reduces the flow
capacity in some sections, resulting in slower and
more discontinuous traffic.
Another weak result, the sensor
MT17aSS114VialeAfrica, located in the heart of city
center of Catania, is one of the main arteries
connecting the southern area to the city center, the
port area and the waterfront. It is characterized by
high traffic flows, with peaks at arrival and departure
times, influenced by commercial activities, public
transport stops and access to the city center and the
port. The road section of Viale Africa is wide, with
several lanes in each direction, with a central
reservation and wide pavements that facilitate
pedestrian movement. However, the presence of side
car parks and junctions contributes to increased
congestion during peak hours.
In such contexts, sudden peaks and decelerations
in traffic flow significantly reduce the accuracy of our
model’s estimates.
These results suggest that geometric
characteristics, such road typology and traffic flows,
play a fundamental role in the efficiency of the model
analyzed. Roads with a SMAPE below 50 are high-
capacity arterial roads with significant and stable
traffic flows. These roads present a relatively stable
penetration rate of FCD data (i.e. the percentage of
vehicles tracked by GPS technology in relation to the
total number of vehicles in transit), which allows for
a more accurate estimation of traffic flows, whereas a
low and variable penetration rate can limit the quality
and reliability of forecasts. This instability, combined
with factors such as frequent intersections, side
entrances, and parking areas, disrupts traffic patterns
and increases estimation errors. As a result, our
chosen model architecture performs significantly
better in structured, high-flow environments than on
roads with irregular or inconsistent traffic patterns.
9 CONCLUSIONS
The findings of this research indicate that the chosen
methodology for scaling FCD data on sensorless
roads has a promising performance, particularly on
high-capacity, constant-flow roads. The strategy
based on the LSTM model has proven to be effective
in identifying traffic patterns under certain
circumstances, allowing for more accurate estimates
of vehicle flow in sensorless regions.
In addition, a detailed study has shown that the
geometric and structural characteristics of the roads
have a significant impact on the performance of the
Scalable Traffic Flow Estimation on Sensorless Roads Using LSTM and Floating Car Data
231

model. High-traffic arterial roads with constant
distribution have lower prediction errors, while roads
with large variations in FCD penetration rates,
frequent intersections and side parking are barriers to
the prediction accuracy using this type of approach.
A key point of this research is to validate of the
methodology’s ability to generate accurate
predictions using data derived from a single
correlated route, rather than relying on a larger group
of sensors for training. This has important
advantages, in terms of computational efficiency,
reduced complexity and a greater degree of
adaptation to the specifics of each route being
processed. This flexibility is critical for real-life
urban traffic management systems and helps their
implementation by enabling infrastructure-
constrained areas to improve the mobility monitoring
and planning strategies in a more accessible and
systematic way.
Based on these findings, the future work related
to this study can evaluate hybrid approaches that
enhance traffic prediction on more complex routes by
combining deep learning techniques with regular
models or other methods that are based on type of
road networks. In addition, it could be valuable to
develop a deeper investigation on the effects of FCD
data penetration, and potentially using other sensor
correlation techniques that may improve upon the
current results.
ACKNOWLEDGEMENTS
The work of Thamires de Souza Oliveira, David
Pagano and Salvatore Cavalieri, who contributed to
the development of the machine learning algorithm,
and Giovanni Calabrò, who was responsible for
downloading the data, has been supported by Italian
Ministry for Research (MUR) in the framework of
PNRR M4C2 Line 1.4, “National Centre for HPC,
Big Data and Quantum Computing”, Spoke 9 “Digital
Society & Smart Cities” (Code CN00000013, CUP
E63C22001000006). The work of Vincenza Torrisi,
who contributed to data collection and interpretation
of results analysis, has been supported by MUR in the
framework of PNRR project SAMOTHRACE,
(ECS00000022). Sensor data were provided by the
“ITS Laboratory” of the Department of Civil and
Architecture Engineering of Catania. Specifically, the
laboratory created within the project RE.S.E.T, is a
traffic monitoring, estimation and short-term
forecasting system, equipped with radar sensor and a
central control station for traffic data elaborations.
REFERENCES
Alkharusi, H. (2012). Categorical variables in regression
analysis: A comparison of dummy and effect coding.
International Journal of Education, 4(2), 202.
Almukhalfi, H., Noor, A., & Noor, T. H. (2024). Traffic
management approaches using machine learning and
deep learning techniques: A survey. Engineering
Applications of Artificial Intelligence, 133, 100164.
Berlotti, M., Di Grande, S., & Cavalieri, S. (2024). Proposal
of a Machine Learning Approach for Traffic. Sensors,
24(7), 2348.
Bernas, M., Płaczek, B., Korski, W., Loska, P., Smyła, J.,
& Szymała, P. (2018). A Survey and Comparison of
Low-Cost Sensing Technologies for Road Traffic
Monitoring. Sensors, 18(10), 3243. https://doi.org/
10.3390/s18103243
CATANIATODAY. (2024). Classifica sulla qualità della
vita, Catania risale: è 83esima su 107. Retrieved from
https://www.cataniatoday.it/cronaca/classifica-qualita-
della-vita-catania-2024.html.
Chen, C., Twycross, J., & Garibaldi, J. M. (2017). A new
accuracy measure based on bounded relative error for
time series forecasting. PLoS One, 12(3), e0174202.
Dai, G., Ma, C., & Xu, X. (2019). Short-Term Traffic Flow
Prediction Method for Urban Road Sections Based on
Space–Time Analysis and GRU. IEEE Access, 7,
143025-143035. https://doi.org/10.1109/ACCESS.201
9.2941280
Dash, C. S. K., Behera, A. K., Dehuri, S., & Ghosh, A.
(2023). An outlier’s detection and elimination
framework in classification task of data mining.
Decision Analytics Journal, 6, 100164. https://doi.
org/10.1016/j.dajour.2023.100164
De Fabritiis, C., Ragona, R., & Valenti, G. (2008, October).
Traffic estimation and prediction based on real-time
floating car data. In 2008 11th International IEEE
Conference on Intelligent Transportation Systems (pp.
197-203). IEEE.
Duan, Y., Lv, Y., & Wang, F.-Y. (2016). Travel time
prediction with LSTM neural network. 2016 IEEE 19th
International Conference on Intelligent Transportation
Systems (ITSC). https://doi.org/10.1109/ITSC.2016
.7795686
Gomes, B., Coelho, J., & Aidos, H. (2023). A survey on
traffic flow prediction and classification. Intelligent
Systems with Applications, 20, 200268.
https://doi.org/10.1016/j.iswa.2023.200268
Hodson, T. O. (2022). Root-mean-square error (RMSE) or
mean absolute error (MAE): when to use them or not.
Geoscientific Model Development, 15, 5481-5487.
Houbraken, M., Logghe, S., Audenaert, P., Colle, D., &
Pickavet, M. (2018). Examining the potential of
floating car data for dynamic traffic management. IET
Intelligent Transport Systems, 12(5), 335–344.
https://doi.org/10.1049/iet-its.2016.0230
Jaeger, T. F. (2008). Categorical Data Analysis: Away from
ANOVAs (transformation or not) and towards Logit
Mixed Models. Journal of Memory and Language,
59(4), 434-446.
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
232

Jabbar, H. K. (2015). Methods to avoid overfitting and
underfitting in supervised machine learning
(comparative study). University of Misan, Misan, Iraq,
and Department of Computer Science, Aligarh Muslim
University, Aligarh, India. Retrieved from https://www.
jmail.com.
Kang, D., Yisheng, L., & Chen, Y. Y. (2017). Short-term
traffic flow prediction with LSTM recurrent neural
network. IEEE 19th International Conference on
Intelligent Transportation Systems (ITSC). https://doi.
org/10.1109/ITSC2017.8317872
Kent State University Libraries. (2018). SPSS Statistics
Tutorials and Resources. Retrieved from https://
libguides.library.kent.edu/SPSS.
Keras: Deep Learning for humans. Retrieved from
https://keras.io/.
Kim, J., Oh, S., Kim, H., & Choi, W. (2023). Tutorial on
time series prediction using 1D-CNN and BiLSTM: A
case example of peak electricity demand and system
marginal price prediction. Proceedings of Engineering
Applications of AI, Article 106817. https://doi.
org/10.1016/j.engappai.2023.106817
Kohonen, T. (1972). Correlation matrix memories. IEEE
Transactions on Computers, 100(4), 353-359.
La Greca, P., & Martinico, F. (2018). Shaping the
Sustainable Urban Mobility: The Catania Case Study.
In R. Papa, R. Fistola, & C. Gargiulo (Eds.), Smart
Planning: Sustainability and Mobility in the Age of
Change (pp. 359-374). Springer.
Meiying, Q., Xiaoping, M., Jianyi, L., & Ying, W. (2011).
Time-series gas prediction model using LS-SVR within
a Bayesian framework. Mining Science and
Technology, 21(1), 153-157.
Mystakidis, A., Koukaras, P., & Tjortjis, C. (2025).
Advances in Traffic Congestion Prediction: An
Overview of Emerging Techniques and Methods. Smart
Cities, 8(1), 25. https://doi.org/10.3390/smartcities8
010025
Pandey, R., Khatri, S. K., Singh, N. K., & Verma, P. (Eds.).
(2022). Artificial intelligence and machine learning for
EDGE computing. Academic Press.
https://doi.org/10.1016/C2020-0-01569-0
Peng, Y.-L., & Lee, W.-P. (2024). Practical guidelines for
resolving the loss divergence caused by the root-mean-
squared propagation optimizer. Applied Soft
Computing, 153, 111335. https://doi.org/10.1016/
j.asoc.2022.111335
Rana, R., & Singhal, R. (2015). Chi-square test and its
application in hypothesis testing. Journal of the Practice
of Cardiovascular Sciences, 1(1), 69–71.
https://doi.org/10.4103/2395-5414.157577
Rodríguez, P., Bautista, M. A., Gonzàlez, J., & Escalera, S.
(2018). Beyond one-hot encoding: Lower dimensional
target embedding. Image and Vision Computing, 75,
21-31. https://doi.org/10.1016/j.imavis.2018.04.002
scikit-learn: Machine Learning in Python. Retrieved from
https://scikit-learn.org/stable/index.html.
Sedgwick, P. (2012). Pearson’s correlation coefficient.
BMJ, 345, e4483. https://doi.org/10.1136/bmj.e4483
TensorFlow: An end-to-end platform for machine learning.
Retrieved from https://www.tensorflow.org/.
Tato, A., & Nkambou, R. (2018). Improving Adam
optimizer. Workshop track - ICLR 2018, Department of
Computer Science, Université du Québec à Montréal,
Montréal, Quebec, Canada.
TomTom Move. Retrieved from https://move.tom
tom.com/.
Torrisi, V., Ignaccolo, M., & Inturri, G. (2018). Innovative
Transport Systems to Promote Sustainable Mobility:
Developing the Model Architecture of a Traffic Control
and Supervisor System. In Proceedings of
Computational Science and Its Applications–ICCSA
2018: 18th International Conference (pp. 622-637).
Springer.
Tu, Y., Lin, S., Qiao, J., et al. (2021). Deep traffic
congestion prediction model based on road segment
grouping. Applied Intelligence, 51, 8519–8541.
https://doi.org/10.1007/s10489-020-02152-x
Vázquez, J. J., Arjona, J., Linares, M. P., & Casanovas-
Garcia, J. (2020). A Comparison of Deep Learning
Methods for Urban Traffic Forecasting using Floating
Car Data. Transportation Research Procedia, 47, 195-
202. https://doi.org/10.1016/j.trpro.2020.03.079
Wang, Y., Ke, S., An, C., Lu, Z., & Xia, J. (2024). A Hybrid
Framework Combining LSTM NN and BNN for Short-
term Traffic Flow Prediction and Uncertainty
Quantification. KSCE Journal of Civil Engineering, 28
(1),363-374. https://doi.org/10.1007/s12205-023-2457-y
Wang, J.-D., Noto Susanto, C. O., & Oktomy, C. (2023).
Traffic Flow Prediction with Heterogeneous Data Using
a Hybrid CNN-LSTM Model. Computers, Materials and
Continua, 76(3), 3097-3112. https://doi.org/10.32604/
cmc.2023.040914
Wu, H., & Gu, X. (2015). Towards dropout training for
convolutional neural networks. Neural Networks, 71, 1–
10. https://doi.org/10.1016/j.neunet.2015.07.003
Yu, Y., Si, X., Hu, C., & Zhang, J. (2019). A review of
recurrent neural networks: LSTM cells and network
architectures. Neural Computation, 31(7), 1235–1270.
https://doi.org/10.1162/neco_a_01199
Scalable Traffic Flow Estimation on Sensorless Roads Using LSTM and Floating Car Data
233
