
Adapting Under Fire: Multi-Agent Reinforcement Learning for
Adversarial Drift in Network Security
Emilia Rivas
1
, Sabrina Saika
1
, Ahtesham Bakht
2
, Aritran Piplai
1
,
Nathaniel D. Bastian
3
and Ankit Shah
4
1
The University of Texas at El Paso, U.S.A.
2
University of South Florida, U.S.A.
3
United States Military Academy, U.S.A.
4
Indiana University, U.S.A.
Keywords:
Network Intrusion Detection System, Adversarial Attack, Drift Adaptation, Reinforcement Learning.
Abstract:
Evolving attacks are a critical challenge for the long-term success of Network Intrusion Detection Systems
(NIDS). The rise of these changing patterns has exposed the limitations of traditional network security meth-
ods. While signature-based methods are used to detect different types of attacks, they often fail to detect
unknown attacks. Moreover, the system requires frequent updates with new signatures as the attackers are
constantly changing their tactics. In this paper, we design an environment where two agents improve their
policies over time. The adversarial agent, referred to as the red agent, perturbs packets to evade the intrusion
detection mechanism, whereas the blue agent learns new defensive policies using drift adaptation techniques
to counter the attacks. Both agents adapt iteratively: the red agent responds to the evolving NIDS, while the
blue agent adjusts to emerging attack patterns. By studying the model’s learned policy, we offer concrete
insights into drift adaptation techniques with high utility. Experiments show that the blue agent boosts model
accuracy by 30% with just 2–3 adaptation steps using only 25–30 samples each.
1 INTRODUCTION
Network Intrusion Detection Systems (NIDS) play a
critical role in monitoring and identifying malicious
traffic. However, they are increasingly challenged
by adversarial attacks, where inputs are intention-
ally crafted to evade detection. Separately, data drift
—shifts in network packet patterns over time— can
degrade detection performance if models are not reg-
ularly updated.
In a real-world network security system, a packet
passing through the network may be adversarial and
capable of executing an attack. NIDS monitor traf-
fic for suspicious behavior and alert the security team
when something abnormal is detected. The security
team then investigates and attributes certain packets
as sources of the attack. However, this human-in-the-
loop process introduces delays, often allowing the at-
tack to succeed before any defensive action is taken.
To reduce this delay, automatic adaptation mecha-
nisms are essential—an area where machine learning
(ML) models play a critical role. Yet, as defenders
adopt ML to improve response time and detection ac-
curacy, adversaries are also evolving their strategies,
using ML techniques to evade detection, further com-
plicating the defense landscape.
Consider a mid-sized financial organization
where, one afternoon, a wave of obfuscated packets
bypasses the ML-enabled NIDS, triggering no im-
mediate alerts. Hours later, analysts in the Secu-
rity Operations Center (SOC) investigate a spike in
failed transactions and retroactively label several ear-
lier packets as malicious. The team now faces a key
decision: Should they retrain the NIDS using a spe-
cific drift adaptation technique or invest additional
time and resources into identifying the most informa-
tive, uncertain samples? Given limited time and com-
putational resources, understanding which adaptation
strategy—or combination thereof—is most effective
in restoring detection performance becomes a critical
research and operational concern.
In prior works such as DeepPackGen (Hore
et al., 2025), deep reinforcement learning (DRL) has
demonstrated strong performance in generating per-
Rivas, E., Saika, S., Bakht, A., Piplai, A., Bastian, N. D., Shah and A.
Adapting Under Fire: Multi-Agent Reinforcement Learning for Adversarial Drift in Network Security.
DOI: 10.5220/0013640900003979
In Proceedings of the 22nd International Conference on Security and Cryptography (SECRYPT 2025), pages 547-554
ISBN: 978-989-758-760-3; ISSN: 2184-7711
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
547

turbations in samples that successfully evade a NIDS.
Similarly, Chale et al. proposed a constrained opti-
mization method for generating adversarial examples
in network intrusion detection systems, which ensures
that perturbed packets remain functional under proto-
col constraints (Chale et al., 2024). However, both
approaches assume that their defender model is static,
which in most cases is not valid in real-world sce-
narios. In practice, organizations periodically update
their defense mechanism to adapt to the changing at-
tacks. Additionally, the available data is typically
not accurately labeled, making the adaptation process
more challenging.
In this paper, our goal is to model a multi-agent
drift adaptation game where one player- the red agent-
will execute valid network perturbations, whereas the
other player- the blue agent- will perform drift adap-
tation by adjusting to the distribution shift introduced
by perturbed samples. The key contributions of this
paper are three-fold:
• We create a novel RL environment that unifies
packet-level attacks and drift adaptation into a sin-
gle co-evolving game between attacker and de-
fender agents. We will make our code publicly
available.
• To our knowledge, this is the first agent-based drift
adaptation framework for NIDS that integrates effi-
cient adaptation techniques, such as active and con-
tinual learning.
• We model intrusion detection as a long-term multi-
agent process that captures strategic evolution.
2 RELATED WORKS
Adversarial Attacks in Network Security: Adver-
sarial robustness has made significant advances in re-
cent years, particularly in the areas of malware analy-
sis and intrusion detection. Despite the progress in de-
fense mechanisms, existing methods still cannot per-
form well under evolving attacks (Bai et al., 2021).
Intrusion Detection System: Traditional intrusion
detection systems often fail to cope with changing
network attacks. Recent studies have proposed adap-
tive techniques such as ensemble learning, online re-
training, and drift detection to mitigate these issues
(Jaw and Wang, 2021; Shyaa et al., 2024). However,
most of these methods treat adaptation as a periodic,
reactive process, without addressing real-time adver-
sarial perturbations.
Drift Adaptation Techniques: The drift method
has been widely studied in adversarial settings us-
ing methods for detection. Surveys by Lu et al. and
Gama et al. provide comprehensive foundations for
drift adaptation techniques in non-stationary environ-
ments (Gama et al., 2014; Lu et al., 2014). Ac-
tive learning and semi-supervised learning have been
widely adopted for cost reduction of manual label-
ing and to help classifiers adapt when labeled data is
limited or uncertain(Settles, 2009). Techniques such
as uncertainty sampling, clustering-based selection,
and core-set methods have shown strong performance
across various domains (Ouali et al., 2020). Contin-
ual learning and contrastive learning offer promising
solutions to mitigate catastrophic forgetting and im-
prove model resilience in the face of evolving threats.
These techniques have shown effectiveness in tasks
such as Android malware detection and intrusion clas-
sification (Wu et al., 2022; Yue et al., 2022).
Multi-Agent Reinforcement Learning: Multi-agent
reinforcement learning (MARL) has also been ex-
plored in network security for dynamic defense mech-
anisms and optimal resource allocation. Previous
works demonstrate that in many security-based sce-
narios MARL performed better than the traditional
security techniques. Zhou et al. provide a detailed
overview of the application of MARL across differ-
ent domains, including network security. Along with
the overview, the author mentions that MARL solves
the limitations of the traditional NIDS through collab-
orative learning. However, its relevance in adaptive
adversarial situations is limited because the majority
of existing works either assume cooperative agent set-
tings or ignore the concept drift (Zhou et al., 2023).
MARL with Drift Adaptation: Previously, Kuppa
et al.(Kuppa and Le-Khac, 2022) proposed a detec-
tion mechanism based on drift techniques where their
method is static and focused on detecting drifted
or adversarial samples and discovering new classes.
Shayesteh et al. also proposed a static drift model that
relies on traditional methods like transfer and ensem-
ble learning for drift detection, closely related to our
work (Shayesteh et al., 2022).
Cyber Security Simulation Environment: Sev-
eral cybersecurity simulation environments have been
proposed, each addressing different aspects of net-
work defense. For instance - Hammar et al. (Hammar
and Stadler, 2020) proposed self play and reinforce-
ment learning to generate reasonable security strate-
gies in a simplified Markov game. Similarly, the Cy-
berBattleSim platform emphasizes system-level ac-
cess and privilege escalation (Team., 2021). Build-
ing on such environments, Piplai et al. introduced a
knowledge-guided two-player reinforcement learning
framework that incorporates cybersecurity knowledge
graphs to train both attacker and defender agents,
demonstrating improved learning efficiency and re-
duced network disruption compared to traditional se-
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
548

tups(Piplai et al., 2022).
Despite notable progress in adversarial robust-
ness, adaptive NIDS, and MARL applications, current
methods either treat adaptation statically, assume be-
nign agent behaviors, or neglect dynamic adversarial
drift. Our work addresses these gaps by introducing
a dynamic, dual-agent reinforcement learning system
capable of continuous drift adaptation under adversar-
ial perturbations. To our knowledge, this is the first
integration of MARL and real-time drift adaptation
techniques specifically targeted at evolving network
threats within a dedicated simulation environment.
3 METHODOLOGY
Framework Overview: Our framework consists of
three primary components —a machine learning-
based classifier, a red agent training module, and
a blue agent training module— and was applied in
two separate experiments using the CICIDS-2017 and
ACI IoT datasets, respectively.
Datasets and Preprocessing: We conduct our ex-
periment using the CICIDS-2017 dataset (Sharafaldin
et al., 2018). It contains both benign and attack sam-
ples in the form of raw pcap files. The data is cap-
tured from the period 3 July 2017 (9 am Monday)
to the 7 July 2017 (5 pm Friday). The identified at-
tack types in this data collection are Brute Force FTP,
Brute Force SSH, DoS, Heartbleed, Web Attack, In-
filtration, Botnet, and DDoS.
We also used the ACI IoT Network Traffic Dataset
2023 (Bastian et al., 2023) for our experiment. The
ACI IoT environment replicates the operational con-
ditions of a standard home Internet of Things (IoT)
network, incorporating a heterogeneous mix of both
wired and wireless devices. The dataset utilized in
this research employs a multi-modal data represen-
tation, encompassing network traffic patterns, inter-
device communication, and device-specific attributes.
Furthermore, this dataset emphasizes the behavioral
analysis of IoT devices by examining intricate net-
work behaviors under both normal operational states
and adversarial conditions. The dataset consists of
the following labelled classes: Benign DNS Flood,
Dictionary Attack, Slowloris, SYN Flood, Port Scan,
Vulnerability Scan, OS Scan, UDP Flood, and ICMP
Flood. The experiment for data collection was con-
ducted in 2023 from October 30th to November 3rd.
Preprocessing begins with accessing the corre-
sponding dataset, which adheres to the TCP/IP model
for network communication. The raw network traf-
fic data is stored in the libpcap (pcap) format, which
is widely recognized as the de facto standard for net-
work packet capture. We follow appropriate packet
labeling guidelines. Each TCP packet contains up
to 1,594 bytes of information; however, not all of
these bytes are utilized, as certain protocol-related
and header-specific information can introduce bias
into the model. Consequently, the Ethernet (ETH)
header, source and destination IP addresses, as well
as source and destination port numbers, were removed
from each packet.
A packet may contain a maximum payload size of
1,460 bytes, but not all packets reach this limit. To
maintain a standardized data structure, packets with
fewer than 1,460 bytes of payload data were zero-
padded. Following preprocessing, the extracted fea-
ture length is 1,525. Finally, the raw packet infor-
mation, originally represented in hexadecimal format,
was converted to decimal values ranging from 0 to
255 and subsequently normalized to [0, 1] to improve
computational efficiency and ensure that learning op-
erates in a continuous input space.
Red Agent and Adversarial Sample Generation:
Within the proposed framework, the objective of the
red agent is to generate adversarial perturbations on
malicious network packets from the datasets, enabling
them to evade detection by machine learning-based
classifiers while preserving their original malicious
functionality. This process involves introducing a per-
turbation ‘δ’ to a malicious packet such that the mod-
ified packet, x
p
, is misclassified as benign by the de-
fender’s classifier. Formally, x
p
is defined as:
x
p
= P(x
original
, δ)
where P represents the perturbation function applied
to the original packet. The adversarial packets in this
study are generated following the approach outlined
in (Hore et al., 2025).
The process of generating adversarial samples for
network packets can be formulated as a sequential
decision-making problem. In this framework, a rein-
forcement learning agent learns to apply perturbations
iteratively using deep reinforcement learning (DRL).
At each iteration, the agent modifies the packet in a
manner that maximizes a predefined reward function,
thereby increasing the likelihood of evading detection
by the defender model. This problem is modeled as a
Markov Decision Process (MDP), with the following
key components:
• State: The state represents the normalized byte val-
ues of the network packet obtained from the prepro-
cessed dataset.
• Action: The action space consists of valid pertur-
bations, δ ∈ ∆ that the agent can apply at each time
step t.
• Reward: The reward function quantifies the effec-
tiveness of taking action a
t
at t. It is designed to
Adapting Under Fire: Multi-Agent Reinforcement Learning for Adversarial Drift in Network Security
549
guide the agent toward learning an optimal policy
that maximizes the likelihood of deceiving the de-
fender model while maintaining packet function.
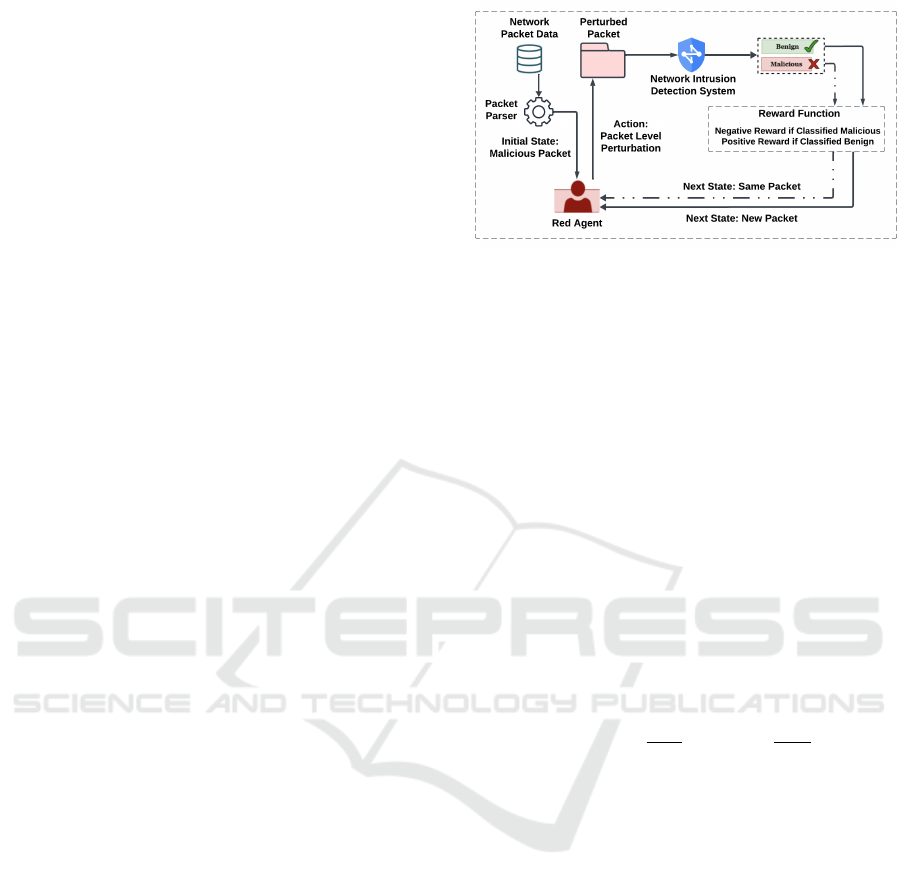
DRL Training: The training environment for the
deep reinforcement learning (DRL) agent consists of
labeled network packets and pre-trained classifiers
from the initial stage. The environment’s state is
defined as a randomly selected malicious network
packet. Each action taken by the agent results in a
state transition, generating a perturbed sample. A
novel reward function is designed to guide the agent
toward learning an optimal policy for evading the
classifier. The process continues iteratively until the
adversarial sample is successfully misclassified or a
predefined maximum number of steps is reached. Fig-
ure 1 shows the red team training of the DRL agent.
During this phase the agent learns an optimal policy
for generating the adversarial samples.
To train the red agent, we employ DRL with
Deep Q-Network (DQN), Proximal Policy Optimiza-
tion (PPO) and Advantage Actor Critic (A2C) . DQN
and PPO is well-suited for problems with discrete ac-
tion spaces, whereas A2C can be used in both contin-
uous and discrete spaces. The perturbation techniques
were applied based on the general principles of pre-
serving packet functionality while introducing adver-
sarial noise, as discussed in prior works. (Apruzzese
et al., 2020; Guo et al., 2021; Huang et al., 2020; Nasr
et al., 2021; Sadeghzadeh et al., 2021). Specifically,
the modifications included:
• Modifying the fragmentation bytes from
“Do Not Fragment” to “Fragment.”
• Modifying the fragmentation bytes from “Do Not
Fragment” to “More Fragments.”
• Increasing or decreasing the Time-To-Live (TTL)
byte value.
• Adjusting the window size bytes by increasing or
decreasing their values.
• Modifying the maximum segment size (MSS)
value by adding, increasing, or decreasing it.
• Adjusting the window scale value by adding, in-
creasing, or decreasing it.
• Incorporating additional segment information into
the packet.
These perturbations were carefully designed to main-
tain packet integrity while enhancing the adversarial
capability to evade detection.
Blue Agent: The goal of the blue agent is to protect
the network from attack by selecting optimal drift
adaptation techniques. Here, the blue agent mainly
uses four drift adaptation techniques to adapt and
Figure 1: Red Agent Training of the DRL agent.
update its policy over time. Using these techniques,
the agent learns how and when to update itself. When
new data arrives, the agent chooses these techniques,
where each technique represents an action. The
action allows the agent to update its classifier based
on the technique it has chosen. In each batch,
multiple drift adaptation techniques can be used. The
state, action, and reward function of the blue agent is
defined as follows-
State: The state in blue agent is represented as
the difference of the mean value of the features
between what the model has seen and what the model
has yet to see.
Let µ
new
be the mean vector of the current batch,
and µ
seen
be the mean vector of all previously seen
data. The feature-difference f
t
at time t can be defined
as follows:
f
t
= µ
new
− µ
seen
=
1
n
new
n
new
∑
i=1
x
new
i
−
1
n
seen
n
seen
∑
j=1
x
seen
j
(1)
where:
• x
new
i
is the i-th sample in the current batch of size
n
new
,
• x
seen
j
is the j-th sample from all previously ob-
served data (size n
seen
).
In addition to the feature difference, the state vec-
tor contains five metrics: classification accuracy, false
positive rate (FPR), false negative rate (FNR), KL di-
vergence to measure distributional shift, and Wasser-
stein distance to quantify the statistical difference be-
tween current and previously seen data. Thus, the fi-
nal state vector is defined as:
s
t
= [Acc, FPR, FNR, D
KL
, D
W
, f
t
] (2)
Action: The state changes based on the four drift
adaptation techniques (Active learning, Online Learn-
ing, Continual Learning, Pseudo Labeling) which are
actions for the blue agent. From the four discrete ac-
tions, the blue agent can select any of the actions to
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
550

update its state and can adapt its policy .These strate-
gies help the agent to be robust to the changes when
the adversaries changes. Preferably more than one ac-
tion is needed to choose in a single batch for adapta-
tion. The description of the four types of actions are
as follows:
Action 0: Online Learning: In this strategy (Shalev-
Shwartz et al., 2012), the RL algorithm interacts with
the environment in real time to gradually update the
model by using the most recent batch. The benefit of
interacting in real time is that there is no need to re-
train from scratch for updates. Given a set of samples
from the environment, we randomly select a subset Q
of size B which is defined by the query budget.
Action 1: Active Learning: This focuses on the most
informative data rather than all of the samples(Settles,
2009). It selectively queries the label to update the
model. For this learning model, we need to cal-
culate the uncertainty using the entropy of the pre-
dicted class probabilities. To perform active learn-
ing under a query budget, we use uncertainty sam-
pling by using the model’s predicted class probabil-
ities. For each incoming sample x
i
, we compute the
prediction confidence as the maximum class probabil-
ity, and select those within a predefined uncertainty
range [p
low
, p
high
]. If the number of uncertain sam-
ples exceeds the query budget B, we select the top-B
most uncertain samples (i.e., those closest to 0.5 con-
fidence).
Action 2: Continual Learning: Here the agent
learns knowledge over time without additional train-
ing on the full dataset. The key idea of this approach
is that it gives more weight to recent samples than the
older ones.The formula is defined as follows:
R = R
rep
∪ R
disc
(3)
where
R
rep
= {x
i
∈ B | H (x
i
) < τ
low
}
R
disc
= {x
i
∈ B | H (x
i
) > τ
high
}
Here, B is the input sample set, H (x
i
) is the entropy
of sample x
i
, and τ
low
, τ
high
are the entropy thresh-
olds used to select representative and discriminative
samples, respectively. We use a combination of these
samples, R , to adapt the model. We use a setup
that performs well on security setting (Rahman et al.,
2025).
Action 3: Pseudo Labeling This is a semi-
supervised learning technique where a model selects
unlabeled samples with prediction confidence above
a threshold and treats the predicted labels as if they
were true (Arazo et al., 2020). These pseudo-labeled
samples are then used to refine the model in the ab-
sence of sufficient labeled data. Let θ denote the
model parameters, f
θ
(x
i
) the model prediction, and
ˆy
i
= argmax f
θ
(x
i
) the assigned pseudo-label. The
model is updated to reduce the loss over the set P of
selected pseudo-labeled samples:
Update(θ;P ) to minimize
∑
(x
i
, ˆy
i
)∈P
L( f
θ
(x
i
), ˆy
i
)
This update may or may not involve gradient-based
methods, depending on the learning framework.
Reward: Multiple actions can be taken on a single
batch, with each action transitioning the environment
to a new state and yielding a reward. The reward
structure for the blue agent is designed to balance ac-
curacy improvement with sample efficiency.
Let Acc
t
test
denote the model’s test accuracy at
time t, and Acc
t−1
test
be the accuracy at the previous
time step. Let r =
|D
used
|
|D
train
|
represent the ratio of training
samples used in the current step, relative to the total
available training data. We also define T as a fixed
test accuracy threshold. The reward R
t
is then defined
as:
R
t
=
(
10, if Acc
t
test
> T
−10 · r + 50 · (Acc
t
test
− Acc
t−1
test
), otherwise
(4)
The constants used in this reward formulation are
chosen to enforce a trade-off between performance
and efficiency. The flat reward of 10 when the accu-
racy exceeds the threshold T serves as a consistent in-
centive to reach and maintain high performance with-
out unnecessary retraining. The penalty term −10 · r
discourages excessive data usage by assigning a cost
proportional to the fraction of the training set used.
This helps promote data-efficient behavior, particu-
larly important under concept drift where retraining
can be costly. The improvement term 50 · (Acc
t
test
−
Acc
t−1
test
) rewards actual gains in test performance,
encouraging the agent to select actions that lead to
meaningful learning. The multiplier 50 ensures that
even small improvements (e.g., 1–2%) yield notice-
able rewards, helping to counterbalance the penalty
4 EXPERIMENTAL RESULTS
In our experimental setup, we model a two-player in-
teraction between a red agent (attacker) and a blue
agent (defender) to simulate a dynamic adversarial
environment. The red agent aims to compromise the
intrusion detection system (IDS) by perturbing data
samples, while the blue agent responds by adapting its
defense strategy. Both agents learn and update their
respective policies in alternating rounds, allowing for
a continual adaptation process. This iterative frame-
work enables the defender to stay resilient against
evolving and previously unseen attack strategies, re-
flecting real-world conditions.
Adapting Under Fire: Multi-Agent Reinforcement Learning for Adversarial Drift in Network Security
551
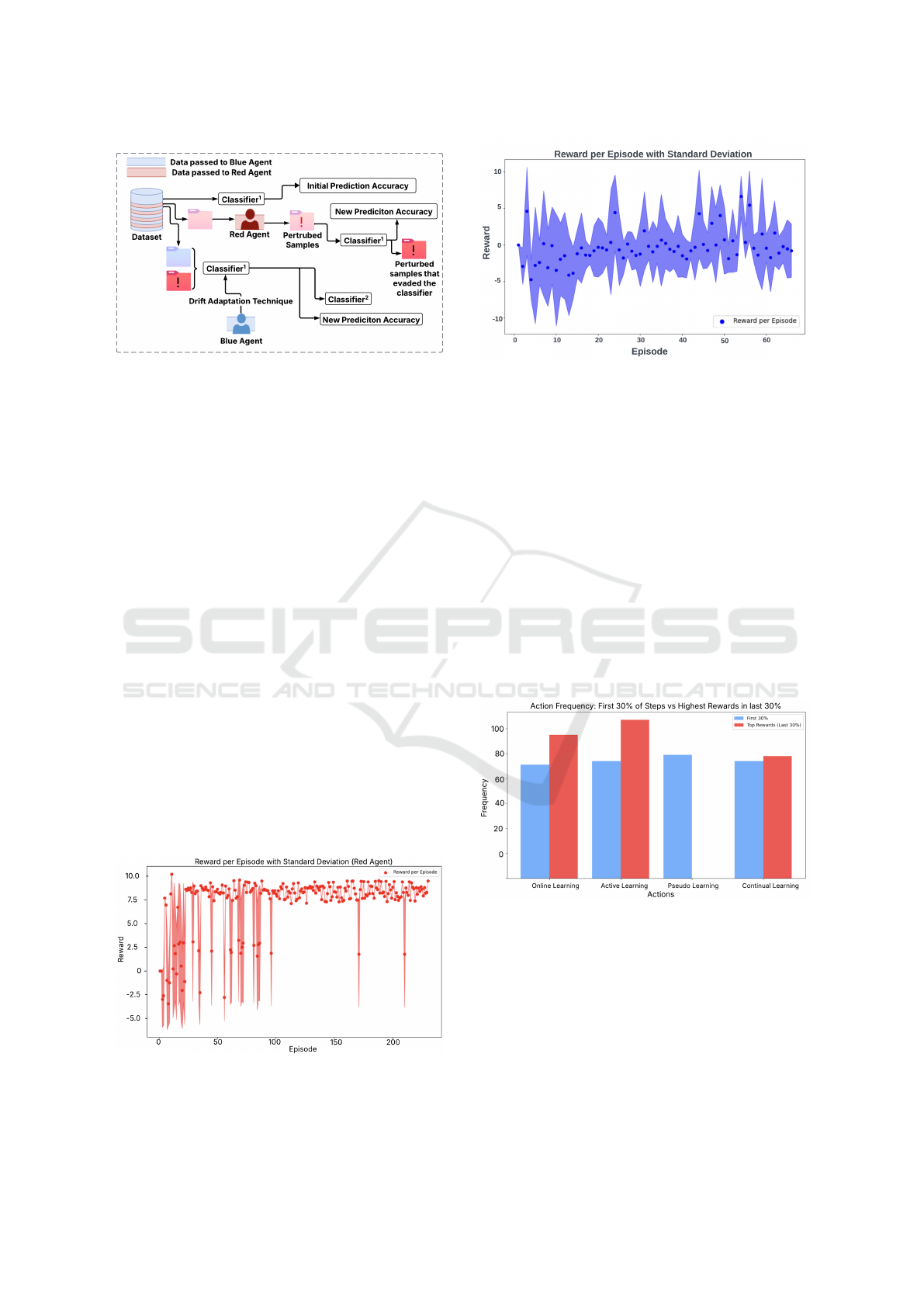
Figure 2: Overview of the adaptive defense framework us-
ing CICIDs 2017 and ACI IoT datasets.
We divide the dataset into 120 sequential batches,
where each batch is used alternately by the red and
blue agents to update their respective policies. We
describe this setup in Figure 2. During the red agent’s
turn, it treats the NIDS (classifier) as static and at-
tempts to perturb the current batch of data to evade
detection. The success of the red agent is measured
by its ability to generate perturbations that bypass the
existing classifier. In the subsequent turn, the blue
agent receives both the red agent’s perturbed data and
the new batch of data, using them to retrain and up-
date the NIDS model. This updated classifier is then
made available to the red agent for its next turn, al-
lowing it to adapt its perturbation strategy based on
the most recent defense model. Through this alternat-
ing interaction, the red agent continuously learns to
attack a moving target, while the blue agent incremen-
tally hardens the classifier using drift adaptation tech-
niques. This two-player adaptation technique helps
both the agents to adapt to the changing policies.
Results: We perform several evaluations to offer in-
sights into the training for the red and the blue agents.
In Figures 3 and 4, we observe the mean episodic re-
wards for the red and the blue agent and the standard
deviations.
Figure 3: Episodic rewards and standard deviation during
Red Agent training (SAC) , reflecting its effectiveness in
perturbing models to evade classification.
Figure 4: Episodic rewards and standard deviation during
Blue Agent training(DQN). The dots represent the average
episodic reward.
We observe the mean and standard deviation of the
red agent’s rewards and find that the model trains rel-
atively quickly. The low standard deviation and high
mean observed after 100 episodes suggest that the red
agent is able to successfully evade the classifier using
only a small number of actions.
As shown in Figure 4, the episodic rewards for
the blue agent exhibit a slower but more stable in-
crease over time. The standard deviation is notably
higher compared to the red agent, indicating that not
all actions yield consistent outcomes. Due to the ex-
ploratory nature of the reinforcement learning agent,
suboptimal actions are more frequent during the early
stages of training but tend to diminish as the agent
converges toward a more effective policy.
Figure 5: Action frequency distribution during Blue Agent
training.
The computational cost of the blue agent’s actions
is significantly higher than that of the red agent, as
they involve updating XGBoost models, which are
computationally intensive and difficult to parallelize
efficiently. Despite the higher cost, we deliberately
chose XGBoost due to its widespread use in the in-
dustry and its strong, reliable performance across a
variety of classification tasks, particularly in security-
related applications.
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
552
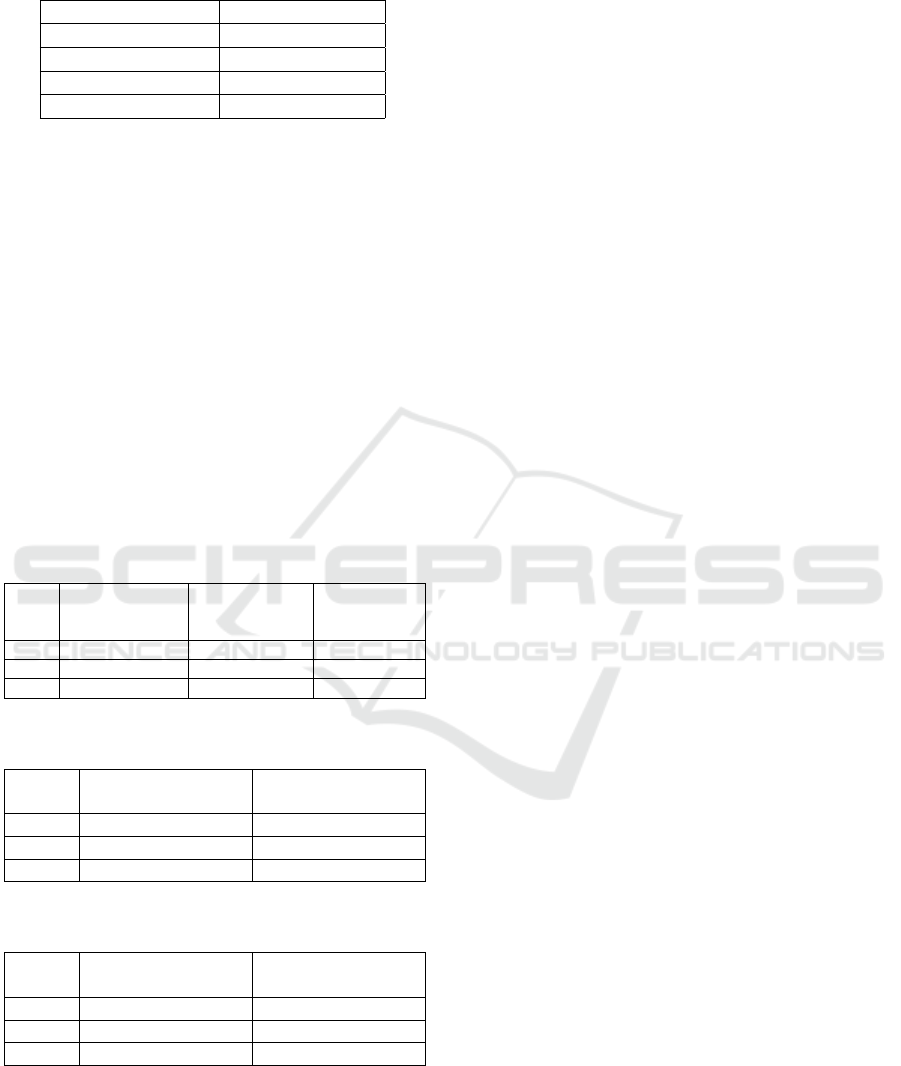
Table 1: Average rewards for each action during Blue Agent
training.
Action Average Reward
Active Learning 0.2157
Online Learning 0.1526
Pseudo Labeling -4.6639
Continual Learning -1.4697
Tables 3, 4 show the drop in classifier perfor-
mance after the red agent’s training, both before and
after the blue agent’s response. The change in accu-
racy reflects how the classifier is impacted by the ar-
tificial drift introduced through the red agent’s per-
turbations. Both the CIC-IDS 2017 and ACI-IoT
datasets yield high accuracy on malware and benign
classes. While the processed CIC-IDS 2017 dataset
is balanced, the ACI-IoT dataset exhibits class im-
balance. We include ACI-IoT in our experiments not
only to assess generalizability but also because CIC-
IDS 2017—though widely used—has become a stan-
dard benchmark, whereas ACI-IoT is a more recently
collected, timely dataset.
Table 2: Ablation study to understand the impact of state
representation when learning the appropriate sequence of
drift adaptation. The scores reflect the average final accu-
racy on adapting to a new dataset. Initial accuracies ranged
between 62-65%.
All state features
State features
without models’
characteristics
State features
without data
characteristics
DQN 89.34 87.18 72.46
PPO 92.05 86.96 84.81
A2C 87.34 85.89 75.44
Table 3: Drop in Model Accuracy for CIC-IDS caused by
red agent.
Change in accuracy
(before blue action)
Change in accuracy
(after blue action)
SAC 97.08 - 64.46% 91.89 - 78.48%
DDPG 97.50 - 64.33% 93.72 - 77.57%
PPO 96.25 - 69.44% 96.12 - 75.88 %
Table 4: Drop in Balanced Accuracy for ACI-IoT dataset
caused by red agent.
Change in accuracy
(before blue action)
Change in accuracy
(after blue action)
SAC 97.62 - 68.46 % 86.07 - 68.01%
DDPG 94.59 - 69.65% 79.62 - 66.21 %
PPO 93.46 - 69.50% 85.92 - 68.35%
In Table 2, we conduct an ablation study to iden-
tify the most effective state representation for our
blue drift adaptation environment, hypothesizing that
an autonomous agent can select an appropriate adap-
tation strategy based on the classifier’s status and
the data distribution. The baseline state includes
both model-specific and data-specific characteristics
(Section 3), and our results show that data charac-
teristics generally have a greater influence on the
agent’s decision. To further analyze the agent’s be-
havior, we examine how its policy evolves during
training by comparing the distribution of selected ac-
tions over time (Figure 5). We find that reliance
on pseudo-labeling declines, suggesting reduced re-
liability under drift, while online and active learn-
ing become dominant strategies. Continual learning
also contributes, though it requires identifying sam-
ples from the known distribution to populate a re-
play buffer—an added cost not captured in our reward
function, which is based solely on test performance
improvement and sample efficiency.
5 CONCLUSION
Our setup reflects real-world dynamics, where adver-
saries continually evolve, and defenders must reg-
ularly update or refresh their models. In practice,
harmful packets may initially go undetected and are
only labeled as malicious or benign after further anal-
ysis by a SOC, often post-incident. This delayed feed-
back highlights the importance of selecting effective
drift adaptation techniques. Our findings suggest that
randomized online learning can be surprisingly effec-
tive, even with as few as 20 samples. Active learn-
ing, which focuses on querying uncertain samples,
also shows promise; however, it may falter when the
model is overly confident, resulting in too few sam-
ples being selected for meaningful updates. There-
fore, a practical recommendation for organizations,
especially under time constraints, is to use a simple
approach with small number of random samples, as it
offers a strong balance between speed and effective-
ness.
We present a novel reinforcement learning envi-
ronment that simulates the co-evolution of network
intrusion and defense strategies through two interact-
ing agents: an adaptive attacker and a learning de-
fender. By framing intrusion detection as a multi-
agent process, we demonstrate that drift adaptation
techniques, especially those requiring minimal la-
beled data, can significantly enhance detection per-
formance, achieving up to a 30% accuracy improve-
ment. We analyze attacker behavior following de-
fender adaptation and explore optimal state space rep-
resentations for the adapting defender. In future, we
plan to investigate scenarios with greater temporal
drift and conduct long-range analyses incorporating
a broader variety of evolving attack types to more ac-
Adapting Under Fire: Multi-Agent Reinforcement Learning for Adversarial Drift in Network Security
553

curately reflect the dynamic threat landscape faced by
modern NIDS.
REFERENCES
Apruzzese, G., Andreolini, M., Marchetti, M., Venturi, A.,
and Colajanni, M. (2020). Deep reinforcement adver-
sarial learning against botnet evasion attacks. IEEE
Transactions on Network and Service Management,
17(4):1975–1987.
Arazo, E., Ortego, D., Albert, P., O’Connor, N. E., and
McGuinness, K. (2020). Pseudo-labeling and con-
firmation bias in deep semi-supervised learning. In
2020 International joint conference on neural net-
works (IJCNN), pages 1–8. IEEE.
Bai, T., Luo, J., Zhao, J., Wen, B., and Wang, Q. (2021).
Recent advances in adversarial training for adversarial
robustness. arXiv preprint arXiv:2102.01356.
Bastian, N., Bierbrauer, D., McKenzie, M., and Nack, E.
(2023). Aci iot network traffic dataset 2023.
Chale, M., Cox, B., Weir, J., and Bastian, N. D. (2024).
Constrained optimization based adversarial example
generation for transfer attacks in network intrusion
detection systems. Optimization Letters, 18(9):2169–
2188.
Gama, J.,
ˇ
Zliobait
˙
e, I., Bifet, A., Pechenizkiy, M., and
Bouchachia, A. (2014). A survey on concept
drift adaptation. ACM computing surveys (CSUR),
46(4):1–37.
Guo, S., Zhao, J., Li, X., Duan, J., Mu, D., and Jing,
X. (2021). A black-box attack method against
machine-learning-based anomaly network flow detec-
tion models. Security and Communication Networks,
2021(1):5578335.
Hammar, K. and Stadler, R. (2020). Finding effective se-
curity strategies through reinforcement learning and
self-play. In 2020 16th International Conference on
Network and Service Management (CNSM), pages 1–
9. IEEE.
Hore, S., Ghadermazi, J., Paudel, D., Shah, A., Das, T.,
and Bastian, N. (2025). Deep packgen: A deep rein-
forcement learning framework for adversarial network
packet generation. ACM Transactions on Privacy and
Security, 28(2):1–33.
Huang, W., Peng, X., Shi, Z., and Ma, Y. (2020). Adver-
sarial attack against lstm-based ddos intrusion detec-
tion system. In 2020 IEEE 32nd International Con-
ference on Tools with Artificial Intelligence (ICTAI),
pages 686–693. IEEE.
Jaw, E. and Wang, X. (2021). Feature selection and
ensemble-based intrusion detection system: an ef-
ficient and comprehensive approach. Symmetry,
13(10):1764.
Kuppa, A. and Le-Khac, N.-A. (2022). Learn to adapt: Ro-
bust drift detection in security domain. Computers and
Electrical Engineering, 102:108239.
Lu, N., Zhang, G., and Lu, J. (2014). Concept drift detec-
tion via competence models. Artificial Intelligence,
209:11–28.
Nasr, M., Bahramali, A., and Houmansadr, A. (2021).
Defeating {DNN-Based} traffic analysis systems in
{Real-Time} with blind adversarial perturbations. In
30th USENIX Security Symposium (USENIX Security
21), pages 2705–2722.
Ouali, Y., Hudelot, C., and Tami, M. (2020). An overview
of deep semi-supervised learning. arXiv preprint
arXiv:2006.05278.
Piplai, A., Anoruo, M., Fasaye, K., Joshi, A., Finin, T., and
Ridley, A. (2022). Knowledge guided two-player rein-
forcement learning for cyber attacks and defenses. In
2022 21st IEEE International Conference on Machine
Learning and Applications (ICMLA), pages 1342–
1349.
Rahman, M. S., Coull, S., Yu, Q., and Wright, M. (2025).
Madar: Efficient continual learning for malware anal-
ysis with diversity-aware replay. arXiv preprint
arXiv:2502.05760.
Sadeghzadeh, A. M., Shiravi, S., and Jalili, R. (2021). Ad-
versarial network traffic: Towards evaluating the ro-
bustness of deep-learning-based network traffic clas-
sification. IEEE Transactions on Network and Service
Management, 18(2):1962–1976.
Settles, B. (2009). Active learning literature survey.
Shalev-Shwartz, S. et al. (2012). Online learning and on-
line convex optimization. Foundations and Trends®
in Machine Learning, 4(2):107–194.
Sharafaldin, I., Lashkari, A. H., Ghorbani, A. A., et al.
(2018). Toward generating a new intrusion detection
dataset and intrusion traffic characterization. ICISSp,
1(2018):108–116.
Shayesteh, B., Fu, C., Ebrahimzadeh, A., and Glitho, R. H.
(2022). Automated concept drift handling for fault
prediction in edge clouds using reinforcement learn-
ing. IEEE Transactions on Network and Service Man-
agement, 19(2):1321–1335.
Shyaa, M. A., Ibrahim, N. F., Zainol, Z., Abdullah, R., An-
bar, M., and Alzubaidi, L. (2024). Evolving cyberse-
curity frontiers: A comprehensive survey on concept
drift and feature dynamics aware machine and deep
learning in intrusion detection systems. Engineering
Applications of Artificial Intelligence, 137:109143.
Team., M. D. R. (2021). Cyberbattlesim. https://github.
com/microsoft/cyberbattlesim.
Wu, Y., Dou, S., Zou, D., Yang, W., Qiang, W., and Jin,
H. (2022). Contrastive Learning for Robust Android
Malware Familial Classification. IEEE Transactions
on Dependable and Secure Computing, pages 1–14.
Yue, Y., Chen, X., Han, Z., Zeng, X., and Zhu, Y. (2022).
Contrastive Learning Enhanced Intrusion Detection.
IEEE Transactions on Network and Service Manage-
ment, 19(4):4232–4247.
Zhou, Z., Liu, G., and Tang, Y. (2023). Multi-agent
reinforcement learning: Methods, applications, vi-
sionary prospects, and challenges. arXiv preprint
arXiv:2305.10091.
SECRYPT 2025 - 22nd International Conference on Security and Cryptography
554
