
Design and Application of the BMFCP Architecture in Flight Simulation
Systems
Jiaxuan Zhang
a
, Runkai Ji and Guanxin Hong
School of Aeronautic Science and Engineering, Beihang University, Beijing, China
Keywords:
Flight Simulation, Flight Dynamic, OOP, Software Architecture Design.
Abstract:
Flight simulation plays a crucial role in aircraft conceptual design, guidance and control system development,
and pilot training. To address the limitations in the architectural design of the dynamics core in traditional flight
simulation systems, this study proposes a novel architecture: Boundary-Motion-Force-Coordinate-Parameter
(BMFCP), based on the characteristics of flight dynamics problems and object-oriented software development
techniques. The BMFCP architecture decomposes the dynamics core of flight simulation systems into three
layers: the boundary layer, the motion equation layer, and the external force layer, along with two packages:
the coordinate transformation package and the parameter package. Using a flight simulation system based
on the BMFCP architecture, simulations of carrier-based aircraft landing and seaplane takeoff and landing
processes were successfully conducted. Thanks to the design of this architecture, different flight simulation
tasks can be achieved by simply modifying the code in the external force layer to simulate various aircraft.
Analysis of the simulation results shows that the time-domain curves of aircraft position and attitude align
with empirical observations, validating the correctness of the flight simulation system based on the BMFCP
architecture.
1 INTRODUCTION
The flight process is inherently risky and uncertain,
especially for newly designed aircraft and inexpe-
rienced pilots. Conducting flight missions without
comprehensive aircraft performance evaluation and
pilot training significantly increases the probability of
aircraft accidents. Flight simulation, which uses com-
puters or other devices to simulate aircraft motion and
control in real-world environments, plays a crucial
role in aircraft design and pilot training. In the field
of aircraft design and controller development, (Zhang
et al., 2024) highlights that conducting flight simu-
lations during the structural design phase can evalu-
ate the operational performance of the aircraft. Simi-
larly, (Zhao et al., 2024) emphasizes that software-in-
the-loop (SITL) simulations can validate control al-
gorithms for aircraft. Regarding pilot training, (Caro,
1973) suggests that training time on flight simulators
can replace actual flight training time, while (Thom-
son, 1989) points out that the degree to which simu-
lators can replace real flight training depends on their
fidelity. (Allerton, 2009) notes that compared to the
1970s, when real flights were used for training, mod-
a
https://orcid.org/0009-0008-2753-4885
ern simulator-based training has significantly reduced
the number of training-related accidents. Addition-
ally, (Maciejewska et al., 2024) highlights the eco-
nomic advantages of simulator-based training.
In recent years, flight simulation technology has
shown a rapid development trend. Firstly, the fidelity
of models has always been a key focus of related re-
search. (Milne et al., 2023) achieved accurate calcu-
lations of aeroelasticity, turbulence, atmosphere, and
other effects during high-fidelity motion simulations
of sounding rockets, laying the foundation for virtual
sensing and digital twins in autonomous navigation
and guidance. (An et al., 2022) utilized the flight
dynamic model, helicopter trim, linearization, and
simulation (HETLAS) system for high-fidelity mo-
tion simulations of complex-configured aircraft, ef-
fectively describing traditional helicopters, propeller-
driven fixed-wing aircraft, and more complex air-
craft configurations. (Rezaei and Khosravi, 2022) im-
proved the fidelity of actuator models by conducting
parametric model identification using aircraft system
data. Secondly, (Dhiman et al., 2025) pointed out
that artificial intelligence and data-driven technolo-
gies are gradually being applied to aircraft model-
ing and simulation. (Cao et al., 2022) proposed an
374
Zhang, J., Ji, R., Hong and G.
Design and Application of the BMFCP Architecture in Flight Simulation Systems.
DOI: 10.5220/0013637000003970
In Proceedings of the 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2025), pages 374-381
ISBN: 978-989-758-759-7; ISSN: 2184-2841
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)

interpretable learning algorithm for aircraft systems,
adaptive-SINDYc, to identify aircraft models. (Pun-
jani and Abbeel, 2015) employed a rectified linear
unit (ReLU) network model to represent helicopter
dynamics.
Although recent advancements in flight simula-
tion technology have been significant, limited atten-
tion has been paid to the architectural design of the
dynamics core in flight simulation systems. A well-
designed dynamics core architecture can offer relia-
bility, reusability, readability, maintainability, and ex-
pandability advantages. An effective architecture of a
dynamics core must integrate various object-oriented
techniques in software design and key algorithms for
flight dynamics problems. To this end, this study an-
alyzes the establishment of aircraft motion models,
key algorithms in flight simulation, and the architec-
tural design of the dynamics core. A novel archi-
tecture termed Boundary-Motion-Force-Coordinate-
Parameter (BMFCP) is proposed. Using a flight simu-
lation system based on the BMFCP architecture, sim-
ulations of carrier-based aircraft landing and seaplane
takeoff and landing processes were successfully con-
ducted. The simulation results validate the correct-
ness and effectiveness of the flight simulation system
based on BMFCP architecture.
2 FLIGHT MOTION MODEL IN
WIND FIELDS
The aircraft motion model in wind fields serves as
the core model driving the flight simulation system.
This section establishes both the full nonlinear mo-
tion model suitable for unsteady operating conditions
and the linearized motion model suitable for steady
operating conditions.
2.1 Definition of Coordinate Systems
and Motion Parameters
We adopt the local tangent plane coordinate system
S
LTP
as the fixed coordinate system, with the x-axis
pointing north, the y-axis pointing east, and the origin
located at the mean sea level. A flight body coordi-
nate system S
f b
is established to describe the absolute
position and attitude of the aircraft. The origin of S
f b
is located at the aircraft’s center of mass CM, with
the x-axis pointing forward, the y-axis pointing to the
right, and the z-axis determined by the right-hand rule
pointing downward. The absolute motion parameters
of the aircraft can be determined by the relative posi-
tion relationship between S
f b
and S
LTP
. Specifically,
the absolute position r
r
r
f
of the aircraft is defined as
the vector from point O
LTP
to point CM as follows.
r
r
r
f
= r
r
r
CM←O
LTP
(1)
The aircraft’s attitude Euler angles, including
pitch angle φ
f
, roll angle θ
f
, and yaw angle ψ
f
, are
defined as a set of Euler angles that transform the S
LTP
to the S
f b
using a z − y − x rotation sequence. the ab-
solute Euler angle vector of the aircraft Θ
Θ
Θ
f
∈ R
3
is
defined as follows.
Θ
Θ
Θ
f
=
φ
f
θ
f
ψ
f
⊤
(2)
The aerodynamic coordinate system S
a
describes
the incoming airflow relative to the aircraft. The ori-
gin of this coordinate system is located at the aircraft’s
aerodynamic center (AC). The x-axis is aligned with
the direction of the airflow velocity vector v
v
v
a
, point-
ing towards the aircraft’s nose. The z-axis lies within
the aircraft’s symmetry plane, perpendicular to v
v
v
a
,
and points downward. The y-axis is determined by
the right-hand rule, pointing to the right side of the
aircraft.
The aerodynamic angles of the aircraft, including
the angle of attack α
f
and the sideslip angle β
f
, can be
defined through the transformation relationship from
S
f b
to S
a
as follows
S
S
S
f b
R
R
R
z
(−α
f
)
−−−−−−−→ ◦
R
R
R
y
(β
f
)
−−−−−−−→ S
S
S
a
(3)
based on the above relationship, the angle of attack α
f
and the sideslip angle β
f
of the aircraft can be derived
from the components of the airflow velocity vector v
v
v
a
in S
f b
as follows.
α
f
= arctan
v
a,z f b
v
a,x f b
β
f
= arcsin
v
a,y f b
|v
v
v
a
|
(4)
The flight path coordinate system S
k
is used to de-
scribe the aircraft’s flight path and track velocity v
v
v
k
.
The origin of this coordinate system is located at the
aircraft’s center of mass CM. The x-axis is aligned
with the track velocity v
v
v
k
and points towards the air-
craft’s nose. The z-axis is perpendicular to the x-axis
and lies in a vertical plane, pointing downward. The
y-axis is determined by the right-hand rule and points
to the right side of the aircraft.
The flight path angles, including the track azimuth
angle χ
f
and the track inclination angle γ
f
, can be
defined through the transformation relationship from
S
LTP
to S
k
as follows
S
S
S
LTP
R
R
R
z
(χ
f
)
−−−−−−−→ ◦
R
R
R
y
(γ
f
)
−−−−−−−→ S
S
S
k
(5)
Design and Application of the BMFCP Architecture in Flight Simulation Systems
375

based on the above relationship, the track azimuth an-
gle χ
f
and the track inclination angle γ
f
of the aircraft
can be derived from the components of the track ve-
locity vector v
v
v
k
in S
LTP
as follows.
γ
f
= arcsin
−
v
k, zLT P
|v
v
v
k
|
χ
f
= arctan
v
k, yLT P
v
k, xLT P
(6)
2.2 Full Nonlinear Motion Model
For a rigid body undergoing general motion, based
on the general motion equations of a rigid body with
respect to its center of mass, the equations of motion
for an aircraft in Euler angle form are expressed as
follows
dr
r
r
f
dt
f b
˙
Θ
Θ
Θ
f
dv
v
v
f
dt
f b
dω
ω
ω
f
dt
f b
=
(v
v
v
f
)
f b
D
D
D
−1
f
(ω
ω
ω
f
)
f b
m
−1
f
(F
F
F
f
)
f b
(J
J
J
f
)
−1
f b
h
(M
M
M
f ↢O
cm
)
f b
− (ω
ω
ω
f
)
×
f b
(J
J
J
f
)
f b
(ω
ω
ω
f
)
f b
i
(7)
where F
F
F
f
represents the resultant external force act-
ing on the aircraft; M
M
M
f ↢O
cm
denotes the resultant ex-
ternal moment about the center of mass; (J
J
J
f
)
f b
is the
inertia matrix of the aircraft relative to its center of
mass and S
f b
; D
D
D
f
is the transformation matrix from
Euler angle rates to angular velocity.
The resultant external force F
F
F
f
and moment
M
M
M
f ↢O
cm
acting on most aircraft consist of three com-
ponents: aerodynamic force, gravitational force, and
thrust. The aerodynamic force F
F
F
f a
and moment
M
M
M
f a↢O
cm
can be expressed as follows
(F
F
F
f a
)
f b
= ¯qSR
R
R
⊤
a← f b
−C
X
C
Y
−C
Z
⊤
(8)
(M
M
M
f a↢O
cm
)
f b
= ¯qSR
R
R
⊤
a← f b
bC
l
¯cC
m
bC
n
⊤
+ (r
r
r
AC←CM
)
×
f b
× (F
F
F
f a
)
f b
(9)
where C
X
,C
Y
,C
Z
,C
l
,C
m
,C
n
represent the drag coef-
ficient, side force coefficient, lift coefficient, rolling
moment coefficient, pitching moment coefficient, and
yawing moment coefficient, respectively. These pa-
rameters are functions of the aircraft’s motion and
aerodynamic parameters, typically obtained through
wind tunnel experiments or computational fluid dy-
namics (CFD) methods. In simulations, these param-
eters are often retrieved via lookup tables. S denotes
the wing area, b the wingspan, ¯c the mean aerody-
namic chord, ¯q the dynamic pressure, and r
r
r
AC←CM
the
vector from the aircraft’s CM to AC.
The gravitational force F
F
F
f g
acting on the aircraft,
expressed in S
f b
is given as follows
(F
F
F
f g
)
f b
= R
R
R
f b←LTP
0 0 −m
f
g
⊤
(10)
where m
f
represents the mass of the aircraft, and g
denotes the gravitational acceleration.
The thrust F
F
F
f t
generated by the aircraft engine and
the additional moment M
M
M
f t
induced by its installation
can be expressed as follows
(F
F
F
f t
)
b
= R
R
R
z
⊤
(θ
eng,ins
)
T 0 0
⊤
(11)
(M
M
M
f t
)
b
= (r
r
r
eng← f b
)
×
f b
× (F
F
F
f t
)
f b
(12)
where θ
eng,ins
represents the engine installation angle,
T denotes the engine thrust, and r
r
r
eng← f b
is the posi-
tion vector of the engine thrust center relative to the
aircraft’s center of mass.
The inputs to the aircraft dynamics system include
five control variables: the left and right elevator de-
flections δ
el
,δ
er
, the aileron deflection δ
a
, the rudder
deflection δ
r
, and the throttle setting τ. Additionally,
there are three wind field disturbances, represented
by the components of the wind velocity vector v
v
v
w
in
S
T LP
: u
w,LT P
,v
w,LT P
,w
w,LT P
.
The essence of full nonlinear flight simulation lies
in the numerical integration of complex nonlinear dif-
ferential equations. In the simulation, the continuous
states are denoted as c
c
c, the discrete states as d
d
d, the
inputs as i
i
i, and the outputs as o
o
o, with time t being a
proper subset of the inputs t ⊂ i
i
i. The full nonlinear
flight simulation can be expressed as the following set
of equations
˙
c
c
c = f (c
c
c,d
d
d, i
i
i)
d
d
d = g(c
c
c,i
i
i)
o
o
o = h(c
c
c,d
d
d, i
i
i)
(13)
where f (c
c
c,d
d
d, i
i
i) represents the continuous state equa-
tions, which, in the context of flight simulation, cor-
respond to the equations of motion shown in Eq. 7.
However, certain aircraft state variables, such as the
angle of attack α
f
, are not part of c
c
c but directly
influence the computation on the right-hand side of
Eq. 7. These parameters can be derived using alge-
braic equations g(c
c
c,i
i
i) related to the continuous states
c
c
c and inputs i
i
i, such as Eq. 4. To provide comprehen-
sive simulation results, the outputs o
o
o are defined as a
combination of the continuous states c
c
c, their deriva-
tives
˙
c
c
c, and the discrete states d
d
d.
2.3 Linearized Motion Model
When an aircraft performs steady-state motion (e.g.,
steady-level flight or steady descent), its motion can
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
376
be well represented by a linearized model under small
perturbation conditions.
We define the state variables ∆X
X
X ∈ R
9
and input
variables ∆U
U
U ∈ R
8
for the aircraft as follows
∆X
X
X =
∆Θ
Θ
Θ
f
∆(v
v
v
f
)
f b
∆(ω
ω
ω
f
)
f b
(14)
∆U
U
U =
∆δ
el
∆δ
er
∆δ
a
∆δ
r
∆τ
∆u
w,LT P
∆v
w,LT P
∆w
w,LT P
(15)
where ∆ represents the perturbation relative to the
trim state. In the linearized motion model, we select
the system output as ∆Y
Y
Y = ∆X
X
X. Additional outputs,
such as the angle of attack α
f
and sideslip angle β
f
,
can be obtained through nonlinear calculations based
on the state variables ∆X
X
X and input variables ∆U
U
U. The
aircraft’s position can be determined by integrating
the velocity.
The linearized motion model of the aircraft can
be expressed in the form of the following state-space
equations
∆
˙
X
X
X = A
A
A∆X
X
X +B
B
B∆U
U
U
∆Y
Y
Y = ∆X
X
X
(16)
where A
A
A and B
B
B are the Jacobian matrices of the state-
space equations, defined as follows
A
A
A =
∂
˙
X
X
X
∂ X
X
X
X
X
X
trim
,U
U
U
trim
B
B
B =
∂
˙
X
X
X
∂U
U
U
X
X
X
trim
,U
U
U
trim
(17)
where X
X
X
trim
and U
U
U
trim
represent the state variables
and input variables of the aircraft in the trimmed con-
dition, respectively.
3 BMFCP ARCHITECTURE
DESIGN IN FLIGHT
SIMULATION SYSTEMS
This study is based on key issues in flight dynam-
ics and incorporates object-oriented software design
techniques to propose a Boundary-Motion-Force-
Coordinate-Parameter (BMFCP) architecture for the
dynamics core of flight simulation systems. The BM-
FCP architecture is based on the Boundary-Control-
Entity (BCE) three-layer architecture proposed by
(Martin, 2002), with adaptive improvements tailored
to flight dynamics problems. This architecture of-
fers advantages in reliability, reusability, readability,
maintainability, and extensibility.
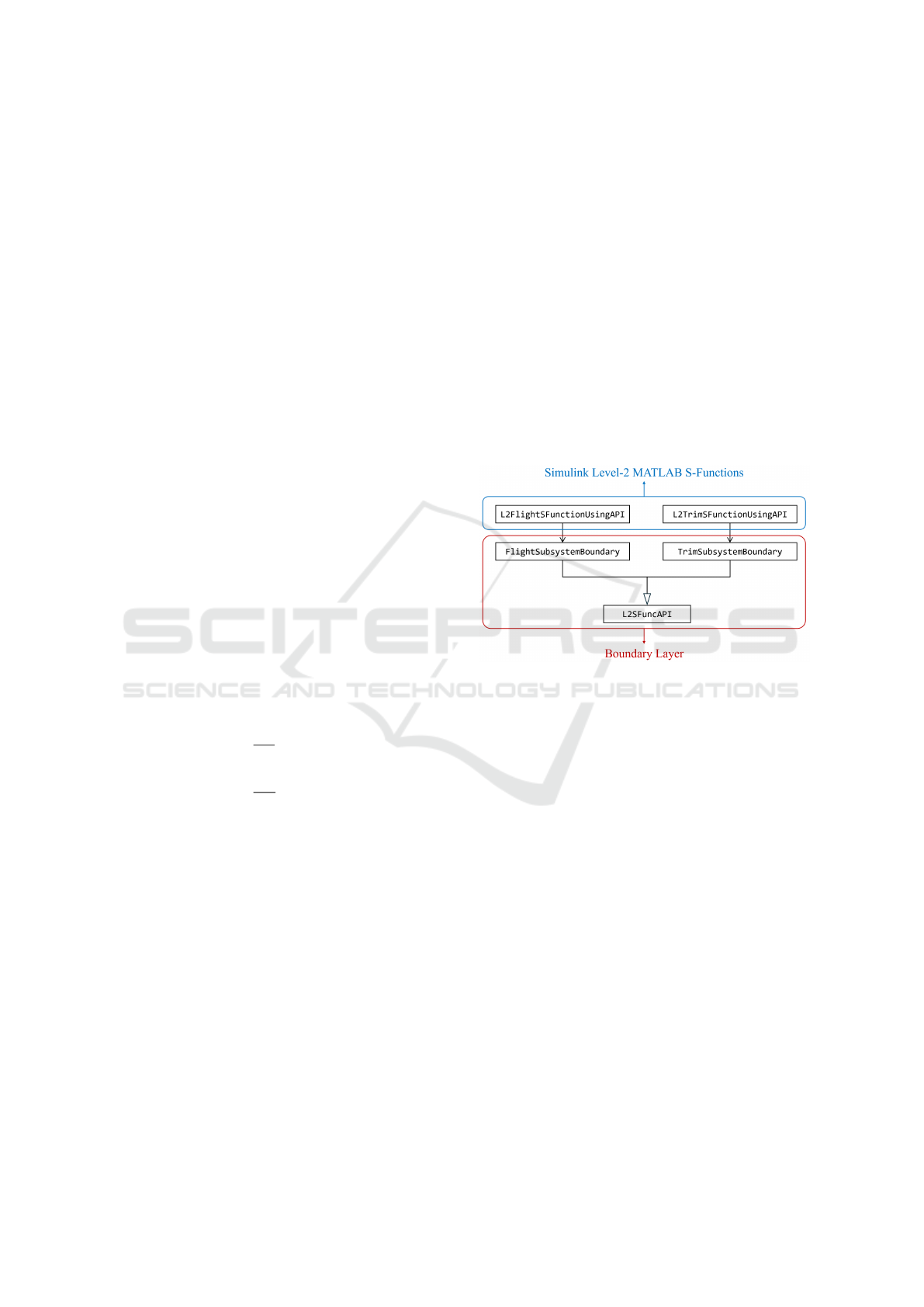
3.1 Boundary Layer Design
In the BMFCP architecture, the Boundary Layer is re-
sponsible for interactions between the system and its
actor. The design of the Boundary Layer adheres to
the interface segregation principle (ISP) proposed by
(Martin, 1996). Taking interaction with the Simulink
system as an example, the class diagram of the bound-
ary layer interacting with Simulink is shown in Fig-
ure 1. Where the Simulink Level-2 MATLAB S-
Function is a tool in Simulink used for creating cus-
tom Simulink block interfaces using MATLAB code.
Figure 1: Class Diagram of the Boundary Layer.
3.2 Motion Equation Layer Design
The motion equation layer in the BMFCP architecture
corresponds to the control layer in the BCE three-
layer architecture. Since the motion equations are
applicable to any aircraft under any operating condi-
tions, this layer is the most stable and invariant in de-
sign. The class diagram of the motion equation layer
is shown in Figure 2. The CalcDerivatives class
is responsible for solving the continuous state deriva-
tives of the aircraft, corresponding to the function
˙c = f (c,d,i) in Eq. 13. The UpdateDiscStates class
is used to compute the discrete states of the aircraft,
corresponding to the function d = g(c,i) in Eq. 13.
The DynamicEquation class describes the aircraft’s
dynamic equations as shown in Eq. 7.
3.3 External Force Layer Design
The external force layer in the BMFCP architecture
corresponds to the Entity Layer in the BCE three-
layer architecture. Due to the varying force calcula-
tion methods for different aircraft, the design of the
Design and Application of the BMFCP Architecture in Flight Simulation Systems
377
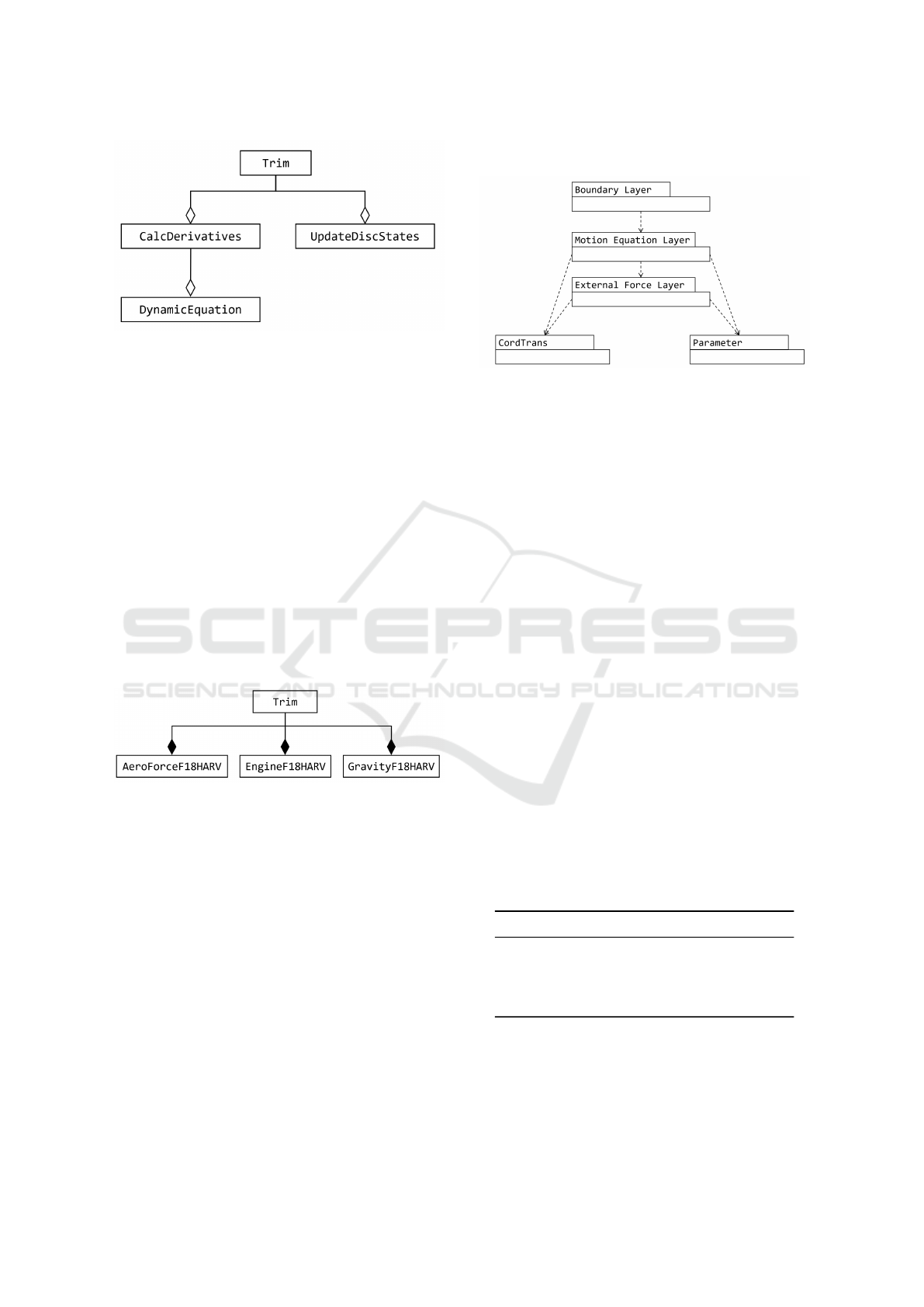
Figure 2: Class Diagram of the Motion Equation Layer.
external force layer must be interchangeable and ex-
tensible. For instance, when simulating the F-18 High
Angle of Attack Research Vehicle (HARV), the class
diagram of the external force layer is shown in Fig-
ure 3. The resultant force class, ResultantForce,
comprises several sub-forces. According to the
Liskov substitution principle proposed by (Liskov
and Wing, 1994), the classes AeroForceF18HARV,
EngineF18HARV, and GravityF18HARV in the exter-
nal force layer can be replaced with classes describing
the forces acting on other aircraft, thereby enabling
simulations for different aircraft. Following the open-
closed principle (OCP) proposed by (Meyer, 1988),
the sub-force classes in the external force layer can be
extended. For example, additional classes describing
hydrodynamic forces and buoyancy can be added to
simulate seaplanes, thereby expanding the simulation
capabilities for such aircraft.
Figure 3: Class Diagram of the External Force Layer.
3.4 BMFCP Architecture Design
In addition to the three primary layers men-
tioned earlier, the BMFCP architecture also in-
cludes two packages: the coordinate transforma-
tion package (CordTrans) and the parameter pack-
age (Parameter). The CordTrans package provides
frequently used coordinate transformation methods,
while the Parameter package allows for the defini-
tion of constants in the MATLAB environment, offer-
ing the advantage of easily switching between differ-
ent aircraft parameters. Since these two packages are
respectively dependent on the motion equation layer
and the external force layer, the overall package dia-
gram of the BMFCP architecture is proposed in accor-
dance with the acyclic dependencies principle (ADP)
introduced by (Martin, 2002), as shown in Figure 4.
Figure 4: Architecture Package Diagram.
4 SIMULATION RESULT
To facilitate the design of carrier-based aircraft land-
ing guidance and control laws, as well as the con-
ceptual design of seaplanes, we conducted simulation
studies on the landing process of a carrier-based air-
craft and the takeoff and landing processes of a sea-
plane. In this section, we present the results of these
simulations and analyze their outcomes.
4.1 Case Study of Carrier-Based
Aircraft Landing
Due to the track inclination angle γ
f
is a constant dur-
ing carrier-based aircraft landing, operating condition
above is a steady-state condition. Therefore, using a
linearized aircraft model for simulation is appropriate.
In this study, the F-18 HARV is used as the test air-
craft, with its parameters sourced from (Asbury and
Capone, 1995), (Iliff, 1997), and (Iliff, 1999). The
aircraft is trimmed to a position where its tailhook is
50 meters below the commanded altitude to evaluate
the performance of the guidance and control system.
The specific trim parameters are shown in Table 1.
Table 1: Carrier-Based Flight Landing Trim Parameter.
Parameter Trim value
Initial hook height error, h
he0
[m] -50
Track inclination angle, γ
f
[Deg] -4
Track speed, V
k
[m/s] 80
Pitch angle, θ
f
[Deg] 2.15
The aircraft’s tailhook’s absolute and commanded
heights are shown as the blue and red lines in Figure 5,
respectively. The simulation results indicate that the
aircraft corrects the tailhook height error within ap-
proximately 20 seconds and effectively maintains the
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
378
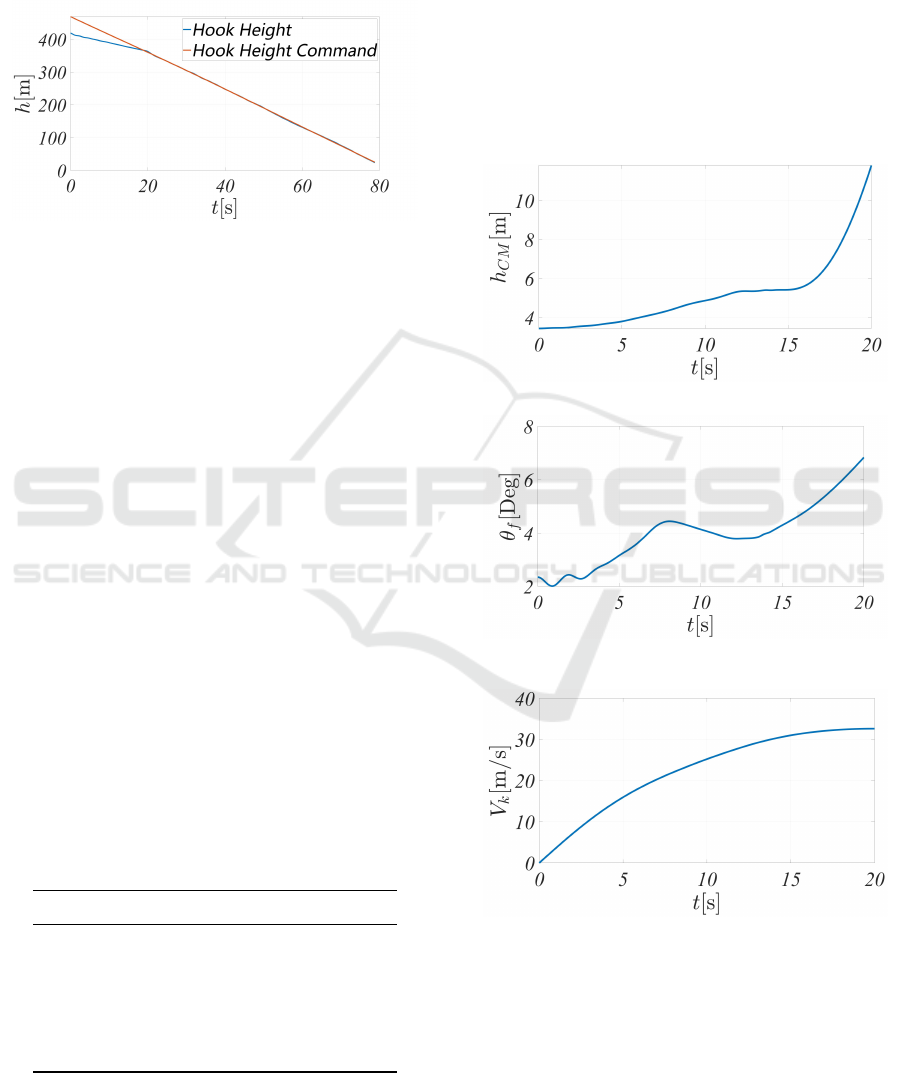
commanded tailhook height during the final approach
phase before touchdown. These results demonstrate
the effectiveness of the flight simulation system based
on the BMFCP architecture when conducting simula-
tions using linearized models.
Figure 5: Carrier-Based Flight Landing Height.
4.2 Case Studies of Seaplane Takeoff
and Landing
Seaplanes are aircraft capable of taking off and
landing on water surfaces. Simulating the takeoff
and landing processes during the preliminary design
phase can facilitate rapid iterative optimization of de-
sign schemes. Due to seaplane takeoff and landing
operations’ highly complex, nonlinear, and unsteady
nature, the aircraft’s full nonlinear motion model must
be employed for simulation. Thanks to the design
of the external force layer in the BMFCP architec-
ture, seaplane takeoff and landing simulation can be
achieved by simply adding classes that describe hy-
drodynamic forces and buoyancy to this layer.
This study conducted a simulation of the takeoff
process for a specific type of seaplane. The seaplane’s
takeoff process includes three stages: stationary float-
ing on the water, water taxiing, and liftoff. The sim-
ulation begins with the aircraft floating stationary on
the water, with the control surfaces trimmed to a state
corresponding to a fixed track inclination angle γ
f
during ascent. Table 2 shows the specific trim param-
eters.
Table 2: Seaplane Takeoff Trim Parameter.
Parameter Trim value
CM height, h
CM
[m] 3.34
Pitch angle, θ
f
[Deg] 2.34
Elevator angle, δ
e
[Deg] -5.92
Aileron angle δ
a
[Deg] 0
Rudder angle δ
r
[Deg] 0
Throttle 1
The time-domain simulation results of the sea-
plane takeoff process are shown in Figure 6. The re-
sults indicate that the aircraft lifts off from the wa-
ter surface approximately 15 seconds after starting
from rest. After liftoff, the aircraft continues to climb,
reaching an altitude of h
CM
= 10m with a track incli-
nation angle of γ
f
≈ 0.5
◦
. The track velocity V
k
sta-
bilizes around 30m/s after liftoff. These results are
consistent with the actual takeoff process of a sea-
plane, validating the effectiveness of the flight simu-
lation system based on the BMFCP architecture when
conducting simulations using the full nonlinear mo-
tion model.
(a) Takeoff CM height.
(b) Takeoff Pitch angle.
(c) Takeoff Track Speed.
Figure 6: Time Domain Curve of Seaplane Takeoff.
This study also conducted a simulation of the
landing process for a specific type of seaplane. The
landing process of the seaplane includes three stages:
steady descent, water touchdown, and deceleration
during water taxiing. The simulation begins with the
Design and Application of the BMFCP Architecture in Flight Simulation Systems
379
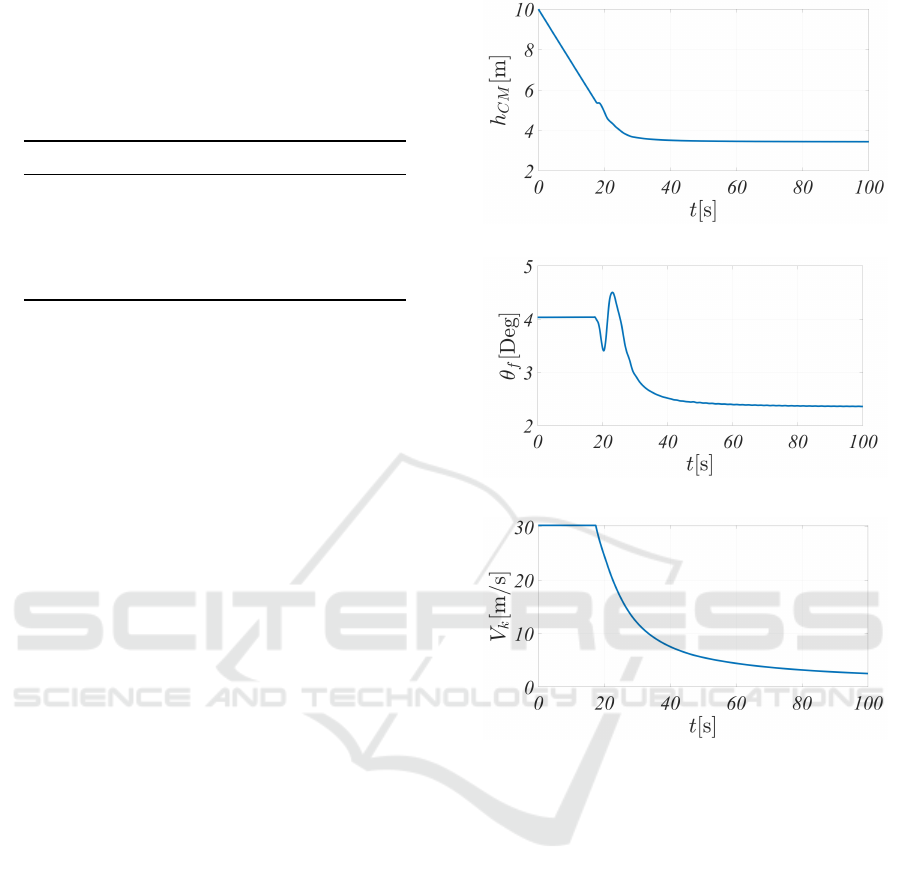
aircraft in a steady descent state, with the control
surfaces and attitude trimmed to maintain a steady
descent condition. The specific trim parameters are
shown in Table 3.
Table 3: Seaplane Landing Trim Parameter.
Parameter Trim value
CM height, h
CM
[m] 10
Track inclination angle, γ
f
[Deg] -0.5
Track speed, V
k
[m/s] 30.3
Pitch angle, θ
f
[Deg] 4.03
Angle of attack, α
f
[Deg] 4.53
The time-domain simulation results of the sea-
plane landing process are shown in Figure 7. The sim-
ulation results indicate that the aircraft touches down
on the water surface at approximately 17 seconds. Af-
ter touchdown, the track velocity V
k
decreases rapidly
and reduces to approximately 2.5m/s at 100 seconds.
The pitch angle θ
f
and angle of attack α
f
exhibit fluc-
tuations of around 1
◦
upon water impact due to hy-
drodynamic forces. These results are consistent with
the actual landing process of a seaplane, validating
the effectiveness of the flight simulation system based
on the BMFCP architecture when conducting simula-
tions using the full nonlinear motion model.
5 CONCLUSIONS
This study, through an in-depth analysis of flight dy-
namics problems and their key algorithms, combined
with object-oriented software design techniques,
proposes a Boundary-Motion-Force-Coordinate-
Parameter (BMFCP) architecture applicable to the
dynamics core of flight simulation systems. This
architecture enhances flight simulation systems’
reliability, reusability, readability, maintainability,
and extensibility. These advantages significantly
reduce modification costs and failure probabilities
when conducting flight simulations for different
aircraft and operation conditions.
This study presents and analyzes two sets of sim-
ulation results based on the linearized and full nonlin-
ear motion models of aircraft, focusing on the carrier-
based aircraft landing process and the seaplane take-
off and landing processes. The results validate the ef-
fectiveness of the flight simulation system based on
the BMFCP architecture in conducting simulations
using both linearized and full nonlinear models. Fur-
thermore, the study highlights the significant role of
this simulation system in the design of aircraft guid-
ance and control laws and overall aircraft design. Ad-
(a) Takeoff CM height.
(b) Takeoff Pitch angle.
(c) Takeoff Track Speed.
Figure 7: Time Domain Curve of Seaplane Landing.
ditionally, the system demonstrates potential as the
dynamics core of flight simulators, with promising fu-
ture pilot training applications.
REFERENCES
Allerton, D. (2009). Principles of Flight Simulation. Wiley.
An, J.-Y., Choi, Y.-S., Lee, I.-R., Lim, M., and Kim, C.-
J. (2022). Performance analysis of a conceptual ur-
ban air mobility configuration using high-fidelity ro-
torcraft flight dynamic model. Int. J. Aeronaut. Space
Sci., 24:1491–1508.
Asbury, S. C. and Capone, F. J. (1995). Multiaxis thrust-
vectoring characteristics of amodel representative of
the f-18 high-alpharesearch vehicle at angles of attack
from 0°to 70°. Technical report, Langley Research
Center.
Cao, R., Lu, Y., and He, Z. (2022). System identification
SIMULTECH 2025 - 15th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
380

method based on interpretable machine learning for
unknown aircraft dynamics. Aerospace Science and
Technology, 126:107593.
Caro, P. W. (1973). Aircraft simulators and pilot training.
Human Factors, 15:502–509.
Dhiman, G., Tiumentsev, A. Y., and Tiumentsev, Y. V.
(2025). Neural network and hybrid methods in air-
craft modeling, identification, and control problems.
Aerospace, 12(1).
Iliff, K. W. (1997). Flight-determined subsonic longitudi-
nalstability and control derivatives of the f-18high an-
gle of attack research vehicle (harv)with thrust vector-
ing. Technical report, Dryden Flight Research Center.
Iliff, K. W. (1999). Flight-determined, subsonic, lateral-
directional stability and control derivatives of the
thrust-vectoring f-18 high angle of attack research ve-
hicle (harv), and comparisons to the basic f-18 and
predicted derivatives. Technical report, Dryden Flight
Research Center.
Liskov, B. and Wing, J. (1994). A behavioral notion of
subtyping. ACM Transactions on Programming Lan-
guages and Systems (TOPLAS), 16(6):1811–1841.
Maciejewska, M., Kurzawska-Pietrowicz, P., Galant-
Gołe¸biewska, M., Gołe¸biewski, M., and Jasi
´
nski, R.
(2024). Ecological and cost advantage from the im-
plementation of flight simulation training devices for
pilot training. Applied Sciences, 14(18).
Martin, R. C. (1996). The interface segregation principle.
C++ Report, 8(7):57–62.
Martin, R. C. (2002). Agile Software Development: Princi-
ples, Patterns, and Practices. Prentice Hall.
Meyer, B. (1988). Object-Oriented Software Construction.
Prentice Hall.
Milne, B., Samson, S., Carrese, R., Gardi, A., and Sabatini,
R. (2023). High-fidelity dynamics modelling for the
design of a high-altitude supersonic sounding rocket.
Designs, 7(1).
Punjani, A. and Abbeel, P. (2015). Deep learning helicopter
dynamics models. In 2015 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
3223–3230.
Rezaei, P. and Khosravi, A. (2022). Parametric model iden-
tification of nonlinear aircraft system with actuator
saturation. In 2022 International Conference on Smart
Information Systems and Technologies (SIST), pages
1–4.
Thomson, D. R. (1989). Transfer of training from simula-
tors to operational equipment—are simulators effec-
tive? Journal of Educational Technology Systems,
17(3):213–218.
Zhang, S., Tong, C., Ni, Y., Li, N., and Lin, Z. (2024).
Structural design and flight simulation of firefighting
and rescue uav based on coaxial dual rotors. Inter-
national Journal of Pattern Recognition and Artificial
Intelligence, 38(12):2458004.
Zhao, W., Wang, Y., Li, L., Huang, F., Zhan, H., Fu, Y., and
Song, Y. (2024). Design and flight simulation verifi-
cation of the dragonfly evtol aircraft. Drones, 8(7).
Design and Application of the BMFCP Architecture in Flight Simulation Systems
381
