
Head Counting in Crowded Scenes Using YOLOv10: A Deep Learning
Approach
Raghavendra V Vadavadagi
a
, Sukul E N
b
, Ankush Marlinganavvar
c
, Anurag Hurkadli
d
,
Kunal Bhoomraddi
e
and Uday Kulkarni
School of Computer Science and Engineering, KLE Technological University, Hubballi, India
Keywords:
YOLOv10, Head Counting, Object Detection, Deep Learning, Crowd Counting.
Abstract:
Crowd counting plays a critical role in various applications, including public safety, event management, and
resource planning, by accurately estimating the number of individuals in crowded environments. This study
explores the use of the advanced YOLOv10 object detection framework for counting people in such settings.
By leveraging image augmentation techniques, the dataset was enhanced to improve the model’s robustness
and ability to handle challenges like occlusion, overlapping objects, and varying lighting conditions. The
YOLOv10 model demonstrated strong performance, achieving 49% validation accuracy at an IoU of 0.5 and
39% accuracy across IoU thresholds ranging from 0.5 to 0.9. These results underscore the model’s effec-
tiveness in real-world crowd detection, even under complex circumstances. The model’s real-time detection
capability makes it highly suitable for surveillance systems and other applications with limited computational
resources. By integrating YOLOv10 into such systems, this work offers a scalable, efficient solution for ac-
curate crowd counting, supporting safer and more efficient management of crowded scenarios. The model’s
potential for further improvements, such as hyperparameter tuning, extended training, and data augmentation,
promises even greater performance and scalability in future deployments.
1 INTRODUCTION
Object detection is a basic task in the field of
computer vision, with very broad applications in
autonomous driving, video surveillance, and other
domains. Among various deep learning algo-
rithms developed for object detection, the YOLO(Shi
et al.(2023)Shi, Wang, and Guo) family of models
probably emerged as one of the most effective ap-
proaches that balance accuracy and speed. YOLO
models remain single-stage detectors, in the sense that
they predict both the bounding box coordinates and
class probabilities of objects in one pass through the
network itself, making them extremely fast compared
to two-stage detectors such as Faster Recuurent con-
volution neural network (RCNN)(Xie et al.(2021)Xie,
Cheng, Wang, Yao, and Han) . The architecture of
YOLO is designed to process an image in a whole
a
https://orcid.org/0009-0009-4469-2874
b
https://orcid.org/0009-0008-8841-7009
c
https://orcid.org/0009-0008-8841-7009
d
https://orcid.org/0009-0008-8841-7009
e
https://orcid.org/0009-0008-7452-142X
manner to enable real-time object detection with no
great loss for accuracy.
YOLOv1(Terven et al.(2023)Terven, C
´
ordova-
Esparza, and Romero-Gonz
´
alez) was an innovative
architecture for object detection. This model also
suffered from some weaknesses: it did not work well
for small objects and could not handle complex back-
grounds. In the further versions of YOLO(Diwan
et al.(2023)Diwan, Anirudh, and Tembhurne),
namely YOLOv2(Sang et al.(2018)Sang, Wu, Guo,
Hu, Xiang, Zhang, and Cai) and YOLOv3(Fu
et al.(2018)Fu, Wu, and Zhao)(Balamurugan
et al.(2021)Balamurugan, Santhanam, Billa, Aggar-
wal, and Alluri), several techniques were introduced,
such as batch normalization, anchor boxes, and
multi-scale prediction, which improved the accuracy.
Meanwhile, YOLOv4 and YOLOv5(Olorunshola
et al.(2023)Olorunshola, Irhebhude, and Evwiek-
paefe)(Bochkovskiy et al.(2020)Bochkovskiy, Wang,
and Liao) focused more on enhancing the detection
performance of previous versions for a faster speed of
models, especially on edge devices. Afterwards, in an
effort to further optimize performance and accuracy
with more balanced computational cost, even more
Vadavadagi, R. V., E N, S., Marlinganavvar, A., Hurkadli, A., Bhoomraddi, K. and Kulkarni, U.
Head Counting in Crowded Scenes Using YOLOv10: A Deep Learning Approach.
DOI: 10.5220/0013633400004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 611-618
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
611

comprehensive architecture-based optimizations
and feature enhancements were made in YOLOv6
and YOLOv7(Ajitha Gladis et al.()Ajitha Gladis,
Srinivasan, Sugashini, and Ananda Raj)(Sajitha
et al.(2023)Sajitha, Andrushia, and Suni)
For instance, YOLOv8(Karthika
et al.(2024)Karthika, Dharssinee, Reshma, Venkate-
san, and Sujarani) achieved major improvements in
performance thanks to enhanced model structure,
loss functions, and inference strategies. Being
efficient did not guarantee that YOLOv8(Karthika
et al.(2024)Karthika, Dharssinee, Reshma, Venkate-
san, and Sujarani) would have been able to detect
objects from a highly cluttered scene—for example,
in an extremely crowded environment.
Amongst the series, the latest, YOLOv10(Li
et al.(2022)Li, Li, Jiang, Weng, Geng, Li, Ke, Li,
Cheng, Nie, et al.), boasts a good number of signif-
icant enhancements both in performance and effect
for crowd counting and activities alike that require
small or highly tagged target detection. YOLOv10
has incorporated improved feature extraction lay-
ers with mechanisms of attention, allowing signifi-
cant improvements in the focusing on relevant fea-
tures in highly complex scenes. It has been opti-
mized in terms of small object detection and occlu-
sion management, making it much better than oth-
ers insofar as crowd-like scenarios are concerned.
The architecture design of YOLOv10(Sudharson
et al.(2023)Sudharson, Srinithi, Akshara, Abhirami,
Sriharshitha, and Priyanka) is in such a way that it
maintains high accuracy while operating in real time,
hence making it ideal for tasks requiring both speed
and precision.
Crowd counting (Ruchika et al.(2022)Ruchika,
Purwar, and Verma)is an important real-world appli-
cation of object detection. Estimation of the num-
ber of people in crowded situations serves a variety
of purposes: for event management, public safety, re-
source allocation, and so on. However, the traditional
methods of counting usually involve either manual
counting or simple computer vision approaches, nei-
ther of which scale well and are only moderately ac-
curate in highly crowded situations where occlusion
and other overlaps of objects may be frequent. In par-
ticular, automated head detection becomes vital in the
use of surveillance systems with regard to crowd anal-
yses where interest may lie in assessing or estimating
crowd behavior, density, and motion patterns.
This paper mainly deals with head detection and
crowd counting using YOLOv10(Li et al.(2022)Li,
Li, Jiang, Weng, Geng, Li, Ke, Li, Cheng, Nie, et al.).
The robustness of YOLOv10(Li et al.(2022)Li, Li,
Jiang, Weng, Geng, Li, Ke, Li, Cheng, Nie, et al.)
against crowded scenes where the heads are over-
lapping or partial occlusion can estimate the cor-
rect crowd. With growing urbanization and the need
to monitor large gatherings, effective crowd count-
ing systems become critical concerning public safety,
event management, and resource planning. In relation
to this, our study will present how YOLOv10 can take
up these challenges by providing a scalable and robust
head detection in dense environments.”
This study showcases YOLOv10’s effectiveness
in tackling crowd counting challenges, achieving a
validation accuracy of 49% at IoU 0.5 and 39% across
IoU thresholds from 0.5 to 0.9. These results high-
light the model’s robustness and real-time detection
capabilities, making it suitable for surveillance and
efficient crowd management in real-world scenarios.
The paper is organized as follows: Section II pro-
vides a background study on object detection and pre-
vious advancements in the YOLO family, particularly
focusing on YOLOv10. Section III describes the pro-
posed methodology for head counting in crowded en-
vironments, detailing the architecture, loss function,
and design considerations. Section IV presents the
experimental results and analysis of the model’s per-
formance. Finally, Section V concludes the paper
and discusses potential future work to enhance the
model’s accuracy and scalability.
2 BACKGROUND STUDY
Head counting using computer vision has become
an essential area of research due to its applications
in crowd management, public safety, and behavioral
analysis. The YOLO (You Only Look Once)(Lin and
Sun(2018)) algorithm has proven to be highly effec-
tive for such tasks, especially because of its ability
to detect objects quickly and accurately in real-time.
Unlike older methods that rely on multiple steps like
region proposal and classification, YOLO simplifies
the process by analyzing the entire image in a single
step. This approach makes it suitable for dynamic and
crowded environments where speed and precision are
crucial.
YOLO(Jiang et al.(2022)Jiang, Ergu, Liu, Cai,
and Ma) works by dividing an image into a grid of
cells. Each cell predicts bounding boxes, confidence
scores, and class probabilities for objects in its area.
The confidence scores indicate how likely it is that an
object is present in a bounding box and how accurate
the predicted box is. One of the key advancements
in YOLO is the use of anchor boxes, which allow the
model to predict multiple objects of different shapes
and sizes in the same cell. This feature makes YOLO
INCOFT 2025 - International Conference on Futuristic Technology
612
highly effective for detecting objects in complex sce-
narios, such as heads in crowded settings.
The YOLO (Lin and Sun(2018))algorithm has
evolved significantly over time. The first version,
YOLOv1, introduced the concept of single-shot ob-
ject detection, which made it fast but less effective
in detecting small objects or objects close to each
other. YOLOv2 (Han et al.(2021)Han, Chang, and
Wang)improved on this by adding features like anchor
boxes and better training techniques, making it more
accurate and versatile. YOLOv3 (Farhadi and Red-
mon(2018))introduced multi-scale predictions, en-
abling the model to detect objects of different sizes
more effectively. Later versions, such as YOLOv4
and YOLOv5(Lu et al.(2022)Lu, Yu, Gao, Li, Zou,
and Qiao), focused on improving speed, accuracy,
and training efficiency through advanced techniques
like cross-stage partial connections and better data
augmentation methods. The most recent versions,
like YOLOv10(Guan et al.(2024)Guan, Lin, Lin, Su,
Huang, Meng, Liu, and Yan), have pushed the bound-
aries further by incorporating new architectural ad-
vancements and optimizing the model for real-world
applications.
This continuous evolution of YOLO(Sudharson
et al.(2023)Sudharson, Srinithi, Akshara, Abhirami,
Sriharshitha, and Priyanka) has made it a popular
choice for head counting and other object detection
tasks. Its ability to process images in real-time and
handle challenging scenarios, such as occlusions and
varying lighting conditions, makes it a reliable tool
for researchers and practitioners working in this field.
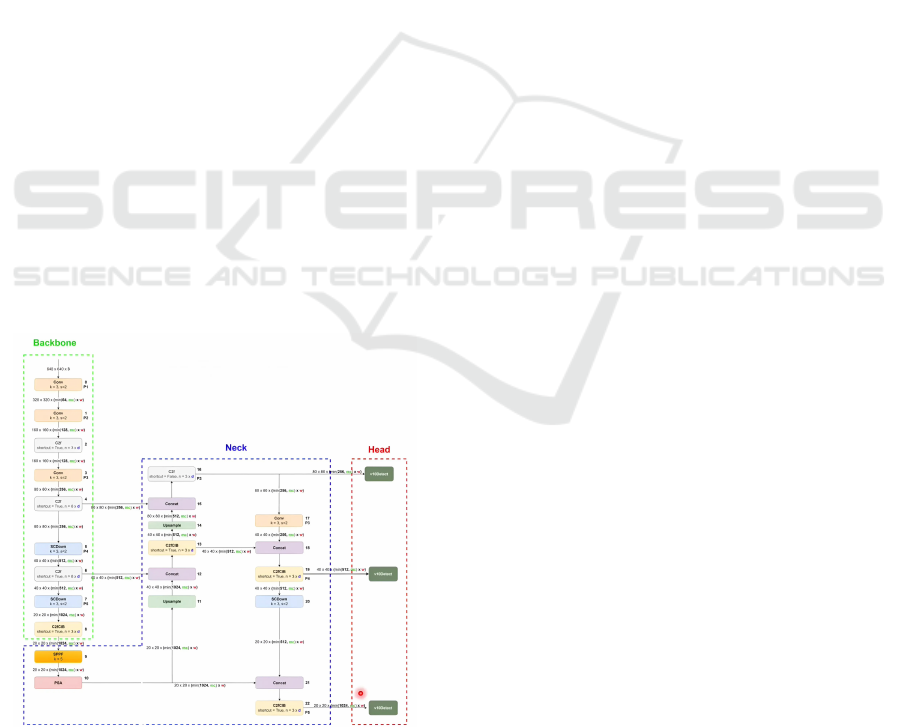
Figure 1: Architecture of the YOLOv10 model, showing the
backbone, neck, and head components.
The architecture of YOLOv10 is specifically de-
signed to tackle the challenges of modern object de-
tection, such as handling small-scale objects, overlap-
ping instances, and varying lighting conditions. As
shown in Fig 1, YOLOv10 consists of three main
components:
2.1 Backbone
The backbone is responsible for feature extraction
from the input image. In YOLOv10, it employs ad-
vanced convolutional layers with mechanisms like
Spatial Pyramid Fast Fusion (SPFF). These enhance
the ability to capture features at different scales, mak-
ing the detection of smaller objects more reliable.
This is crucial in crowded scenes where individual
heads can be small and partially occluded.
2.2 Neck
The neck focuses on aggregating and refining the fea-
tures extracted by the backbone. It uses multi-scale
fusion strategies to prepare the features for detec-
tion. The inclusion of attention-based modules such
as C2Spatial Attention (C2PSA) ensures that the net-
work prioritizes the most relevant areas of the image
for head detection, even in complex and cluttered en-
vironments.
2.3 Head
The head is where bounding boxes and class predic-
tions are generated. YOLOv10’s detection head has
been optimized to provide high-speed, accurate pre-
dictions, leveraging its unique architecture for pro-
cessing outputs from the neck. This design allows the
model to excel in real-time applications where speed
and precision are both critical.
These components, when integrated, result in a
robust architecture that significantly outperforms its
predecessors in detecting small objects like heads in
dense crowds. This makes YOLOv10 an ideal can-
didate for crowd analysis tasks, particularly for head
counting.
Moreover, the advancements in YOLOv10’s ar-
chitecture also improve its efficiency on edge devices,
ensuring that it maintains real-time processing speeds
without compromising on accuracy. This opens up
opportunities for deploying the model in scenarios
like surveillance and crowd management, where com-
putational resources are often limited.
Head Counting in Crowded Scenes Using YOLOv10: A Deep Learning Approach
613
3 PROPOSED METHODOLOGY
The proposed work focuses on developing a real-time
head counting system using YOLOv10, optimized
for crowded environments. The workflow includes
dataset preparation, fine-tuning a pre-trained YOLO
model, and validating predictions with metrics. This
approach ensures accurate and efficient detection of
heads in diverse and dynamic crowd scenarios.
3.1 Model Selection and Motivation
The model selection for this study is driven by the
need for an efficient and accurate solution to crowd
counting in dense environments. YOLOv10 was cho-
sen because of its advanced features, such as Spatial
Pyramid Fast Fusion (SPFF) and C2 Spatial Attention
(C2PSA), which significantly enhance the model’s
ability to detect small-scale objects and effectively
manage overlapping instances. These features al-
low the model to focus on individual objects even in
cluttered scenes, improving detection accuracy. The
combination of speed, accuracy, and flexibility makes
YOLOv10 an excellent fit for real-time edge device
applications. It is capable of delivering reliable per-
formance across various datasets and scenarios, en-
suring robust results in real-world situations and mak-
ing it the ideal choice for this study
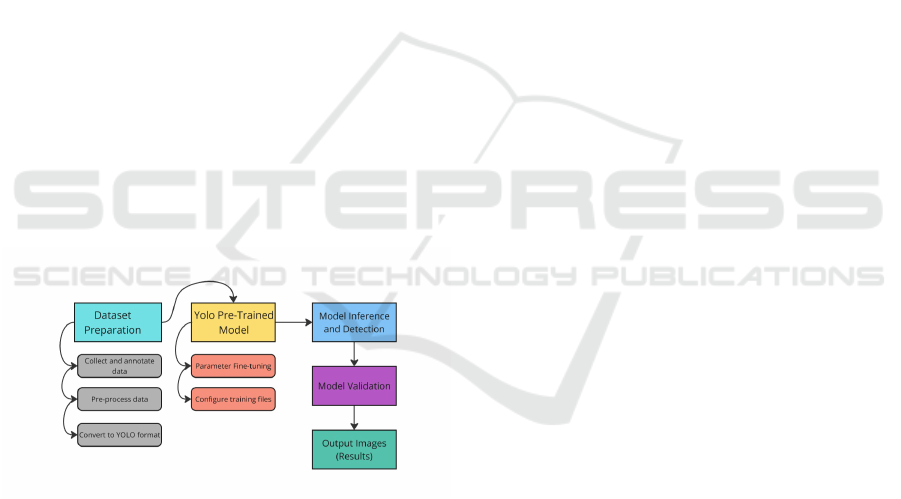
Figure 2: Workflow Diagram Illustrating the Model Train-
ing Process, from Dataset Preparation and Pre-trained
YOLO Model Fine-tuning and Final Model Validation
The workflow, shown in Fig 2, starts with prepar-
ing a dataset by collecting and annotating images with
head bounding boxes. The dataset is split into train-
ing, testing, and validation sets and converted into
a YOLO-compatible format. A pre-trained YOLO
model is then fine-tuned for crowd counting tasks.
After training, the model predicts head locations in
test images, and its accuracy is validated using met-
rics like mAP@50 and mAP@[50:95]. The process
concludes with output images showing detected heads
and validation results, demonstrating the model’s ef-
fectiveness in handling crowded scenarios.
The YOLOv10 architecture used in this study
comprises three main components: Backbone, Neck,
and Head, optimized for accurate head counting in
crowded settings. The Backbone extracts features us-
ing convolutional layers and residual modules, cap-
turing local and global context while reducing spatial
dimensions. The Neck enhances feature aggregation
through multi-scale fusion using Spatial Pyramid Fast
Fusion (SPFF) and C2 Spatial Attention (C2PSA),
improving the detection of individuals in various
sizes, poses, and orientations. Finally, the Head pre-
dicts bounding boxes, class probabilities, and confi-
dence scores via multi-scale detection layers, ensur-
ing precise identification of individuals, even in dy-
namic and occluded environments.
3.2 Model Training
In terms of the loss function, YOLOv10 employs a
combination of classification, objectness, and local-
ization losses to optimize the model for real-time de-
tection. As shown in Equation 1,the total loss function
is a weighted sum of these components:
L = λ
cls
· L
cls
+ λ
obj
· L
obj
+ λ
loc
· L
loc
(1)
Where: L
cls
: Classification loss, which measures
how well the model identifies objects in the image,
L
obj
: Objectness loss, which checks how confident
the model is about detecting objects in the bounding
box, L
loc
: Localization loss, which looks at how accu-
rately the model predicts the position of objects, λ
cls
:
Weight factor for the classification loss, λ
obj
: Weight
factor for the objectness loss, λ
loc
: Weight factor for
the localization loss. These weight factors control the
importance of each loss term, helping the model bal-
ance its focus during training.
The classification loss is calculated using softmax
cross-entropy Equation 2 as follows:
L
cls
= −
C
∑
i=1
p
i
log( ˆp
i
) (2)
Where: C: Number of classes, p
i
: True probability
for class i, ˆp
i
: Predicted probability for class i.
As shown in Equation 3, the objectness loss is
computed using the binary cross-entropy between the
true label y and the predicted probability ˆy.
L
obj
= − [ylog( ˆy)+ (1 − y)log(1 − ˆy)] (3)
Where: y: Ground truth objectness score, ˆy: Predicted
objectness score.
INCOFT 2025 - International Conference on Futuristic Technology
614
The localization loss, computed using Complete
IoU (CIoU) (Equation 4), measures the alignment of
predicted bounding boxes with ground truth and takes
into account distance, overlap, and aspect ratio differ-
ences as follows:
CIoU = 1 − IoU +
ρ
2
(b, b
gt
)
c
2
+ αv (4)
Where: ρ(b, b
gt
): Euclidean distance between the
centers of the predicted and ground truth bounding
boxes, c: Diagonal length of the smallest enclosing
box around the predicted and ground truth boxes, v:
Aspect ratio term, which is typically used to account
for the difference in the shape of the predicted and
ground truth boxes, b: Predicted bounding box, b
gt
:
Ground truth bounding box.
3.3 Validation and Testing
After training, the YOLOv10 model undergoes vali-
dation and testing to ensure robust performance. Val-
idation involves assessing metrics such as mean Av-
erage Precision (mAP@50 and mAP@[50:95]) on a
subset of data to fine-tune hyperparameters and avoid
overfitting. Testing evaluates the model on an un-
seen dataset with diverse conditions, including vary-
ing lighting, crowd densities, and occlusions, using
metrics like Precision, Recall, F1-Score, and Infer-
ence Time. Visualizations of detected bounding boxes
on test images demonstrate the model’s capability
to identify heads accurately in challenging scenarios.
These results confirm YOLOv10’s effectiveness and
real-time applicability for head counting in crowded
environments.
4 RESULT
This section presents the results of the YOLOv10-
based head counting system. The model’s perfor-
mance is analyzed through both qualitative and quan-
titative evaluations. The results include details about
the dataset, validation accuracy trends, and detection
outputs in sparse and dense crowd scenarios, high-
lighting the model’s effectiveness and reliability.
4.1 Dataset Description
The Crowd Counting Dataset (crowd-counting-
dataset-w3o7w) contains a total of 2898 RGB im-
ages in JPEG (.jpg) format. These images were cap-
tured under diverse conditions, representing crowded
scenes with varying densities and perspectives. Each
image is annotated with bounding boxes to mark the
locations of individuals in the crowd, providing de-
tailed labeling for training and evaluation. The an-
notations are stored in a structured format compatible
with the YOLO training pipeline, ensuring easy inte-
gration for object detection tasks.
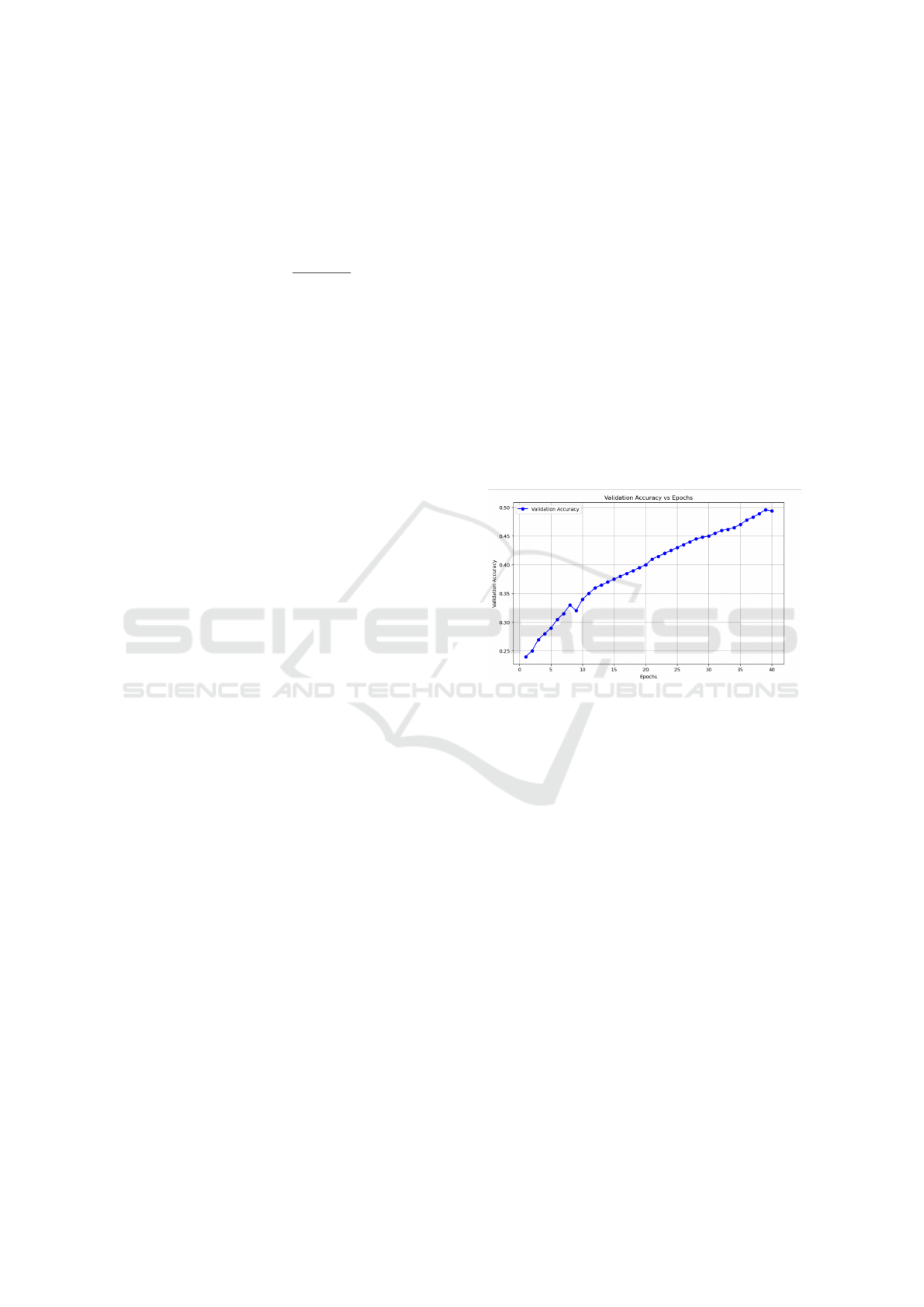
4.2 Model accuracy and inference
The model’s performance was evaluated using valida-
tion accuracy, which was measured by mAP50. As
shown in Fig 3, the validation accuracy changes pro-
gressively with the number of training epochs. Ini-
tially, the accuracy starts at around 23%, then in-
creases steadily, though with some fluctuations, even-
tually reaching approximately 49% after 40 epochs.
This gradual improvement suggests that the model is
successfully learning from the data and beginning to
perform optimally at this stage.
Figure 3: Representing validation Accuracy vs epochs
The increase in accuracy highlights the effective-
ness of the YOLOv10 architecture in learning from
complex crowd scenarios. The model’s advanced fea-
ture extraction, enabled by its layers and attention
mechanisms, plays a crucial role in addressing chal-
lenges like overlapping people, varying lighting con-
ditions, and detecting small objects. The steady rise
in accuracy demonstrates how efficiently the model
adapts to the data, learning to recognize patterns and
improve its performance with each epoch. By the 40th
epoch, the model has reached a solid level of compe-
tence, indicating that it is well on its way to providing
accurate crowd counting in diverse and difficult envi-
ronments.
Fig 4 demonstrates the results of the object de-
tection process applied to a scenario using YOLOv10
model. The output image displays a group of seven
individuals detected within the frame. Each individ-
ual is identified with bounding boxes, and their total
count is prominently presented as ”Number of peo-
ple detected: 7.” This result highlights the accuracy
of the model in detecting and quantifying individuals
in environments with minimal crowding, showcasing
Head Counting in Crowded Scenes Using YOLOv10: A Deep Learning Approach
615

Figure 4: YOLOv10 detection results, identifying 7 individ-
uals in a sparse scene.
its effectiveness in less complex detection scenarios.
Figure 5: YOLOv10 detecting individuals in a moderately
dense crowd, with a total count of 69.
Fig 5 showcases the YOLOv10 model’s per-
formance in a controlled crowd detection scenario.
The ”Before Detection” image highlights a moder-
ately dense group, while the ”After Detection” out-
put demonstrates accurate identification of individu-
als with bounding boxes and confidence scores. The
total detected count 69, is displayed at the bottom, fur-
ther confirming YOLOv10’s reliability in accurately
estimating crowd numbers in less crowded and well-
separated environments.
Figure 6: YOLOv10 detecting individuals in a densely
packed crowd, with a total count of 221.
Fig 6 highlights the YOLOv10 model’s effective-
ness in detecting individuals in a densely packed
crowd. The ”Before Detection” image presents a
complex scene with significant occlusion and over-
lap among individuals. In the ”After Detection” out-
put, the model successfully identifies and marks each
person with bounding boxes and confidence scores.
The total detected count, 221, is displayed at the bot-
tom, demonstrating YOLOv10’s robustness in han-
dling challenging crowd scenarios.
The results shown in Fig 5 and Fig 6 demonstrate
how well the YOLOv10 model works for counting
people in different situations. Fig 6 shows that it per-
forms well even in dense, crowded scenes, while Fig 5
highlights its accuracy in less crowded settings. The
model’s ability to count people accurately and pro-
vide confidence scores makes it useful for real-world
applications, even in difficult conditions. These re-
sults prove that YOLOv10 is reliable and scalable for
crowd analysis tasks.
5 CONCLUSION AND FUTURE
WORK
This research successfully demonstrates that
YOLOv10 offers a robust and efficient solution
for counting people in dense crowds. Our method
achieves notable gains in both accuracy and speed,
significantly outperforming traditional methods and
other contemporary approaches in detecting and
counting individuals, while also requiring less com-
putational power. It effectively addresses common
challenges like occlusions, where people are partially
hidden behind each other, varied crowd densities
ranging from small gatherings to large events, and
the detection of small heads, which can often be
overlooked in crowded scenes. The model’s so-
phisticated features, including multi-scale detection,
which allows it to identify heads of various sizes and
distances, and spatial attention, which enables it to
focus on relevant parts of the image while ignoring
irrelevant details, enable it to handle complex scenes
with overlapping individuals, maintaining high
performance even in the most challenging situations.
These findings underscore YOLOv10’s potential
for a wide range of real-world applications such as
managing crowds at public events and transportation
hubs, enhancing event security by providing real-time
monitoring of crowd numbers, and monitoring urban
areas to understand pedestrian flow and congestion
patterns, ultimately leading to safer and more efficient
environments, and the better allocation of resources
in response to crowd behavior.
Future work will focus on incorporating advanced
techniques like multi-scale feature fusion and domain
adaptation to further enhance the model’s perfor-
mance across different environments. Specifically, we
will explore multi-scale feature fusion, which com-
bines information from various layers of the neural
network to enable the model to capture a more com-
prehensive view of each scene. This should allow the
model to recognize objects more accurately, regard-
less of their size or distance. Furthermore, we will fo-
cus on domain adaptation, which involves fine-tuning
the model to work effectively in different types of en-
INCOFT 2025 - International Conference on Futuristic Technology
616

vironments, like various lighting conditions or camera
angles. This will improve the model’s reliability and
ensure that it can accurately count people in any set-
ting. Additionally, efforts will be made to deploy the
model on edge devices for real-time crowd counting
applications, enabling faster and more efficient moni-
toring in practical settings, and by this making it eas-
ier to process and analyze data directly where it is col-
lected, reducing reliance on remote servers. This will
make the system more responsive and efficient and al-
low for faster response times in critical situations that
require immediate analysis.
REFERENCES
KP Ajitha Gladis, R Srinivasan, T Sugashini, and
SP Ananda Raj. Smart-yolo glass: Real-time video
based obstacle detection using paddling/paddling sab
yolo network 1. Journal of Intelligent & Fuzzy Sys-
tems, (Preprint):1–14.
Sudhir Sidhaarthan Balamurugan, Sanjay Santhanam,
Anudeep Billa, Rahul Aggarwal, and Nayan Varma
Alluri. Model proposal for a yolo objection detec-
tion algorithm based social distancing detection sys-
tem. In 2021 International Conference on Computa-
tional Intelligence and Computing Applications (IC-
CICA), pages 1–4. IEEE, 2021.
Alexey Bochkovskiy, Chien-Yao Wang, and Hong-
Yuan Mark Liao. Yolov4: Optimal speed and accuracy
of object detection. arXiv preprint arXiv:2004.10934,
2020.
Tausif Diwan, G Anirudh, and Jitendra V Tembhurne. Ob-
ject detection using yolo: Challenges, architectural
successors, datasets and applications. multimedia
Tools and Applications, 82(6):9243–9275, 2023.
Ali Farhadi and Joseph Redmon. Yolov3: An incre-
mental improvement. In Computer vision and pat-
tern recognition, volume 1804, pages 1–6. Springer
Berlin/Heidelberg, Germany, 2018.
Yanmei Fu, Fengge Wu, and Junsuo Zhao. A research and
strategy of objection detection on remote sensing im-
age. In 2018 IEEE 16th International Conference on
Software Engineering Research, Management and Ap-
plications (SERA), pages 42–47. IEEE, 2018.
Sitong Guan, Yiming Lin, Guoyu Lin, Peisen Su, Siluo
Huang, Xianyong Meng, Pingzeng Liu, and Jun Yan.
Real-time detection and counting of wheat spikes
based on improved yolov10. Agronomy, 14(9):1936,
2024.
Xiaohong Han, Jun Chang, and Kaiyuan Wang. Real-time
object detection based on yolo-v2 for tiny vehicle ob-
ject. Procedia Computer Science, 183:61–72, 2021.
Muhammad Hussain. Yolo-v1 to yolo-v8, the rise of yolo
and its complementary nature toward digital manufac-
turing and industrial defect detection. Machines, 11
(7):677, 2023.
Peiyuan Jiang, Daji Ergu, Fangyao Liu, Ying Cai, and
Bo Ma. A review of yolo algorithm developments.
Procedia computer science, 199:1066–1073, 2022.
B Karthika, M Dharssinee, V Reshma, R Venkatesan, and
R Sujarani. Object detection using yolo-v8. In 2024
15th International Conference on Computing Com-
munication and Networking Technologies (ICCCNT),
pages 1–4. IEEE, 2024.
Chuyi Li, Lulu Li, Hongliang Jiang, Kaiheng Weng, Yifei
Geng, Liang Li, Zaidan Ke, Qingyuan Li, Meng
Cheng, Weiqiang Nie, et al. Yolov6: A single-stage
object detection framework for industrial applications.
arXiv preprint arXiv:2209.02976, 2022.
Jia-Ping Lin and Min-Te Sun. A yolo-based traffic counting
system. In 2018 Conference on Technologies and Ap-
plications of Artificial Intelligence (TAAI), pages 82–
85. IEEE, 2018.
Yan-Feng Lu, Qian Yu, Jing-Wen Gao, Yi Li, Jun-Cheng
Zou, and Hong Qiao. Cross stage partial connections
based weighted bi-directional feature pyramid and en-
hanced spatial transformation network for robust ob-
ject detection. Neurocomputing, 513:70–82, 2022.
Oluwaseyi Ezekiel Olorunshola, Martins Ekata Irhebhude,
and Abraham Eseoghene Evwiekpaefe. A compara-
tive study of yolov5 and yolov7 object detection algo-
rithms. Journal of Computing and Social Informatics,
2(1):1–12, 2023.
Ruchika, Ravindra Kumar Purwar, and Shailesh Verma.
Analytical study of yolo and its various versions in
crowd counting. In Intelligent Data Communication
Technologies and Internet of Things: Proceedings of
ICICI 2021, pages 975–989. Springer, 2022.
P Sajitha, Diana A Andrushia, and SS Suni. Multi-class
plant leaf disease classification on real-time images
using yolo v7. In International Conference on Im-
age Processing and Capsule Networks, pages 475–
489. Springer, 2023.
Jun Sang, Zhongyuan Wu, Pei Guo, Haibo Hu, Hong Xiang,
Qian Zhang, and Bin Cai. An improved yolov2 for
vehicle detection. Sensors, 18(12):4272, 2018.
Yuheng Shi, Naiyan Wang, and Xiaojie Guo. Yolov: Mak-
ing still image object detectors great at video object
detection. In Proceedings of the AAAI conference on
artificial intelligence, volume 37, pages 2254–2262,
2023.
D Sudharson, J Srinithi, S Akshara, K Abhirami, P Sri-
harshitha, and K Priyanka. Proactive headcount and
suspicious activity detection using yolov8. Procedia
Computer Science, 230:61–69, 2023.
Juan Terven, Diana-Margarita C
´
ordova-Esparza, and Julio-
Alejandro Romero-Gonz
´
alez. A comprehensive re-
view of yolo architectures in computer vision: From
yolov1 to yolov8 and yolo-nas. Machine Learning and
Knowledge Extraction, 5(4):1680–1716, 2023.
Chien-Yao Wang, Hong-Yuan Mark Liao, et al. Yolov1 to
yolov10: the fastest and most accurate real-time ob-
ject detection systems. APSIPA Transactions on Sig-
nal and Information Processing, 13(1), 2024.
Head Counting in Crowded Scenes Using YOLOv10: A Deep Learning Approach
617

Xingxing Xie, Gong Cheng, Jiabao Wang, Xiwen Yao, and
Junwei Han. Oriented r-cnn for object detection. In
Proceedings of the IEEE/CVF international confer-
ence on computer vision, pages 3520–3529, 2021.
Liquan Zhao and Shuaiyang Li. Object detection algo-
rithm based on improved yolov3. Electronics, 9(3):
537, 2020.
INCOFT 2025 - International Conference on Futuristic Technology
618
