
Exploring Camouflaged Object Detection Techniques for Invasive
Vegetation Monitoring
Henry O. Velesaca
1,2
, Hector Villegas
1
and Angel D. Sappa
1,3
1
Escuela Superior Polit
´
ecnica del Litoral, ESPOL,
Campus Gustavo Galindo Km. 30.5 V
´
ıa Perimetral, Guayaquil, 090902, Ecuador
2
Software Engineering Department, Research Center for Information and Communication Technologies (CITIC-UGR),
University of Granada, 18071, Granada, Spain
3
Computer Vision Center, 08193-Bellaterra, Barcelona, Spain
Keywords:
Camouflaged Object Detection, Weed Detection, Pest Detection, Deep Learning, Computer Vision, UAV.
Abstract:
This paper presents a novel approach to weed detection by leveraging state-of-the-art camouflaged object de-
tection techniques. The work evaluates six camouflaged object detection architectures on agricultural datasets
to identify weeds naturally blending with crops through similar physical characteristics. The proposed ap-
proach shows excellent results in detecting weeds using Unmanned Aerial Vehicle images. This work estab-
lishes a new framework for the challenging task of weed detection in agricultural settings using camouflaged
object detection approaches, contributing to more efficient and sustainable farming practices.
1 INTRODUCTION
In recent years, the agricultural sector has faced in-
creasing challenges in effective weed management,
particularly when dealing with weeds that naturally
blend with crops through similar physical charac-
teristics (e.g., (Chauhan et al., 2017), (Westwood
et al., 2018)). This phenomenon, known as biological
mimicry or natural camouflage, presents a significant
obstacle in traditional weed detection methods. The
advancement of precision agriculture and computer
vision technologies has opened new possibilities for
addressing this complex challenge through innovative
camouflage-based detection approaches (e.g., (Mold-
vai et al., 2024), (Wu et al., 2021)).
Traditional approaches to weed detection have
primarily relied on conventional image processing
techniques such as color analysis, texture features,
and shape-based recognition. These methods typi-
cally employ techniques like RGB color space trans-
formation, edge detection algorithms, and morpho-
logical operations to distinguish between crops and
weeds (e.g., (Parra et al., 2020), (Agarwal et al.,
2021)). Historically, researchers have utilized tech-
niques such as the Normalized Difference Vegetation
Index (NDVI), color indices, and spectral reflectance
measurements to identify vegetation patterns. How-
ever, these conventional methods often fall short when
confronted with sophisticated camouflage scenarios,
where weeds closely mimic the visual characteristics
of the desired crops (L
´
opez-Granados et al., 2006).
Weed detection systems that can identify and dif-
ferentiate camouflaged weeds from crops are becom-
ing increasingly crucial for sustainable agriculture
(Singh et al., 2024). These systems not only promise
to reduce herbicide usage but also offer more precise
and environmentally friendly weed control solutions.
By leveraging advanced image processing techniques,
machine learning algorithms, and sophisticated pat-
tern recognition methods, camouflage-based weed de-
tection represents a promising frontier in agricultural
technology (Coleman et al., 2023).
This research explores various methodologies
and techniques for detecting weeds that exhibit
camouflage characteristics, focusing on overcoming
the challenges posed by visual similarities between
weeds and crops. The study examines both classical
computer vision approaches and cutting-edge deep
learning methods, aiming to develop more accurate
and reliable detection systems for practical agricul-
tural applications.
To address this work in detail, the manuscript is
organized as follows. Section 2 introduces the back-
ground on using weed detection techniques based on
classical and deep learning, and addresses the prob-
lem as a camouflaged object detection approach. Sec-
Velesaca, H. O., Villegas, H., Sappa and A. D.
Exploring Camouflaged Object Detection Techniques for Invasive Vegetation Monitoring.
DOI: 10.5220/0013630200003967
In Proceedings of the 14th International Conference on Data Science, Technology and Applications (DATA 2025), pages 619-626
ISBN: 978-989-758-758-0; ISSN: 2184-285X
Copyright © 2025 by Paper published under CC license (CC BY-NC-ND 4.0)
619

tion 3 presents the proposed approach to identify
weeds using camouflage detection techniques. Then,
Section 4 shows the experimental results taking as ref-
erence a dataset with aerial images with the presence
of weeds and a case study of banana crops evaluating
COD techniques. Finally, conclusions are presented
in Section 5.
2 BACKGROUND
The field of weed detection has evolved significantly
over the past decades, transitioning from manual in-
spection methods to sophisticated automated systems.
This evolution has been particularly marked by the in-
tegration of artificial intelligence and specialized de-
tection techniques to address complex scenarios such
as camouflaged weeds in agricultural settings.
Deep learning has revolutionized the field of com-
puter vision and, by extension, weed detection sys-
tems. A recent work by Rehman et al. (Rehman et al.,
2024) demonstrates the effectiveness of drone-based
weed detection using feature-enriched deep learning
approaches, achieving significant improvements in
detection accuracy across various agricultural scenar-
ios. This builds upon foundational work by Tang et al.
(Tang et al., 2017), who pioneered the combination of
K-means feature learning with convolutional neural
networks for weed identification, establishing early
benchmarks for automated detection systems. Further
advances are made by Balabantaray et al. (Balaban-
taray et al., 2024), who have developed targeted weed
management systems using robotics and YOLOv7 ar-
chitecture, specifically focusing on Palmer amaranth
detection and demonstrating the practical application
of deep learning in real-world agricultural settings.
A particularly challenging aspect of weed detec-
tion involves scenarios where weeds exhibit cam-
ouflage characteristics within their environment. In
(Singh et al., 2024), the authors address this com-
plex issue through an innovative approach for iden-
tifying small and multiple weed patches using drone
imagery. Their work specifically tackles the challenge
of detecting weeds in scenarios where they naturally
blend with crops, introducing novel techniques for
distinguishing camouflaged weeds in complex agri-
cultural environments. Their methodology demon-
strated remarkable success in detecting small-scale
infestations that are typically difficult to identify due
to their visual similarity with surrounding vegetation.
This breakthrough in handling camouflaged scenar-
ios has opened new possibilities for addressing one of
the most challenging aspects of automated weed de-
tection systems.
3 PROPOSED STUDY
This section details the different stages followed to
carry out the proposed study.
3.1 Dataset Description
Weed detection and classification datasets represent
crucial resources in agricultural technology, playing a
vital role in developing automated systems for sus-
tainable farming practices. These specialized col-
lections of images are specifically designed to ad-
dress the challenges in identifying and managing un-
wanted vegetation in various agricultural settings.
The datasets used for this work (e.g., (Future, 2024a),
(Future, 2024b)) encompass different weed species
captured under different lighting conditions, growth
stages, and field scenarios, making them particularly
valuable for developing robust detection systems. The
images have been captured from aerial shots. These
datasets serve as fundamental tools in developing
more sophisticated and efficient weed management
solutions, ultimately contributing to more sustainable
and productive agricultural practices, while also high-
lighting the growing importance of data-driven ap-
proaches in modern agriculture.
3.2 COD Approaches
Camouflage Object Detection (COD) represents one
of the most fascinating and complex challenges in
computer vision. This problem, inspired by natural
phenomena where certain organisms have evolved to
blend with their surroundings, has motivated the de-
velopment of various innovative techniques in recent
years. The ability to identify objects that deliberately
try to confuse themselves with their environment not
only has applications in security and surveillance but
also in biology, ecology, and agricultural applications,
which is the focus of this investigation. Below are the
most significant contributions of the state-of-the-art in
the COD task that will be used to carry out the differ-
ent experiments. It is worth mentioning that this ap-
proach to weed detection using COD techniques has
not been widely addressed; there is only one prece-
dent (e.g., (Singh et al., 2024)).
In the current work, off-the-shelf COD approaches
are evaluated in the datasets mentioned above (e.g.,
(Future, 2024a), (Future, 2024b)). Table 1 shows the
input size of the image, the backbone used as well as
the number of parameters of each technique. These
approaches are briefly described next.
The first chosen technique has been proposed by
Fan et al. (Fan et al., 2021) (SINet-v2) it establishes a
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
620
Table 1: Comparison between different characteristics of the camouflage techniques used.
Technique Year Input size (px) Backbone #Param. (M)
SINet-v2 (Fan et al., 2021) 2021 352 × 352 Res2Net50 (Gao et al., 2019) 24.93
BGNet (Chen et al., 2022b) 2022 416 × 416 Res2Net50 (Gao et al., 2019) 77.80
C
2
F-Net (Chen et al., 2022a) 2022 352 × 352 Res2Net50 (Gao et al., 2019) 26.36
DGNet (Ji et al., 2023) 2023 352 × 352 EfficientNet (Tan and Le, 2019) 8.30
HitNet (Hu et al., 2023) 2023 352 × 352 PVTv2 (Wang et al., 2022) 25.73
PCNet (Yang et al., 2024) 2024 352 × 352 PVTv2 (Wang et al., 2022) 27.66
Figure 1: Example of images from the datasets presented in (Future, 2024a) and (Future, 2024b).
fundamental benchmark in detecting camouflaged ob-
jects. Their pioneering research introduces a convolu-
tional neural network-based approach that revolution-
izes how this challenge is addressed. The technique is
distinguished by its ability to extract distinctive fea-
tures that allow differentiating camouflaged objects
from their background, thus establishing a solid foun-
dation for future research in the field. Building upon
this foundational work and expanding its capabilities,
Ji et al. (Ji et al., 2023) (DGNet) present an innova-
tive approach based on deep gradient learning. Their
method stands out for meticulously analyzing grad-
ual changes in visual patterns, using gradient infor-
mation to identify subtle differences between camou-
flaged objects and their surroundings. This technique
excels not only in its computational efficiency but also
in its ability to detect objects in highly complex cam-
ouflage situations, complementing and enhancing the
features established by SINet-v2.
Taking this progress in a more specialized direc-
tion while incorporating these established principles,
Yang et al. developed PlantCamo (Yang et al., 2024)
(PCNet), a technique specifically designed for detect-
ing camouflage in plants. This method represents
a significant advance in understanding natural cam-
ouflage in the plant kingdom, incorporating specific
biological knowledge and unique plant camouflage
patterns to improve detection accuracy while build-
ing upon the gradient analysis concepts introduced by
DGNet. Further advancing these developments and
integrating previous insights, the contribution of Hu
et al. (Hu et al., 2023) (HitNet) introduces a high-
resolution iterative feedback network that marks an
important milestone. Their innovative method uses
an iterative process that progressively refines detec-
tion results, leveraging high-resolution information to
capture the most subtle details in images. This feed-
back approach allows for continuous improvement in
detection accuracy while incorporating elements from
both SINet-v2’s feature extraction and DGNet’s gra-
dient analysis.
Contrary to the previous approaches, Chen et al.
(Chen et al., 2022b) (BGNet) propose a unique per-
spective with their boundary-guided network. This
technique is distinguished by its focus on the pre-
cise identification of camouflaged object boundaries,
using sophisticated edge and contour information to
improve segmentation. The method proves particu-
larly effective in cases where the boundaries between
the camouflaged object and the background are es-
pecially diffuse, complementing the high-resolution
analysis of HitNet. Building upon all these advances
and synthesizing their strengths, Chen et al. (Chen
et al., 2022a) (C
2
F-Net) present an innovative method
based on context-aware cross-level fusion. This tech-
nique represents a significant advance by integrating
information from multiple feature levels, considering
both spatial and semantic contexts. The intelligent
fusion of different levels of information allows for a
more holistic understanding of the scene, significantly
improving detection robustness across various cam-
ouflage scenarios while incorporating the boundary
Exploring Camouflaged Object Detection Techniques for Invasive Vegetation Monitoring
621

awareness of BGNet and the iterative refinement of
HitNet.
Recent advances in camouflaged object detection
have enhanced our detection capabilities, creating op-
portunities across biodiversity conservation, security,
and scientific research. While various techniques of-
fer complementary approaches that contribute to the
field’s development, and despite rapid progress in
computer vision and machine learning, challenges
persist in achieving accurate detection and segmen-
tation of camouflaged objects in real-world scenarios.
3.3 Metric Evaluation
To evaluate results for COD approaches different
evaluation metrics have been proposed in the liter-
ature in the current work, five widely used metrics
for COD tasks are adopted to evaluate the detection
results of each model, namely, the S-measure (S
α
)
(Fan et al., 2017), weighted F-measure (F
w
β
) (Mar-
golin et al., 2014), Mean Absolute Error (M) (Per-
azzi et al., 2012), E-measure (E
φ
) (Fan et al., 2018),
and F-measure (F
β
) (Achanta et al., 2009). S
α
com-
putes the structural similarity between prediction and
ground truth. F
w
β
is an enhanced evaluation metric
that extends the traditional F
β
by incorporating spatial
weights to better assess segmentation quality, partic-
ularly emphasizing boundary accuracy and location-
based importance of detected pixels in object detec-
tion tasks. M focuses on evaluating the error at the
pixel level between the normalized prediction and the
ground truth. E
φ
simultaneously assesses the overall
and local accuracy of COD based on the human visual
perception mechanism. F
β
is an overall measure that
synthetically considers both precision and recall.
Since different scores of F-measure can be ob-
tained according to different precision-recall pairs,
there are the mean F-measure (F
mean
β
) and the max-
imum F-measure (F
max
β
). Similar to the F-measure,
maximum, and mean denoted as E
mean
φ
and E
max
φ
are
also used as evaluation metrics.
4 RESULTS AND DISCUSSION
This section presents the results obtained with the
proposed study. For the performance evaluation, the
metrics described in Sec. 3.3 are used.
4.1 Dataset
The dataset used for the comparisons is obtained from
(Future, 2024a) and (Future, 2024b), each dataset
Table 2: Distribution of dataset.
Task # of images with class weed
Dataset 1 Dataset 2 Dataset
Training 543 300 843
Validation 91 10 101
Testing 38 8 46
Total 672 318 990
consists of 672 and 318 images, respectively, and both
datasets are merged to get a unique dataset of 990 im-
ages. Table 2 shows the dataset distribution for each
subset. Additionally, Figure 1 shows examples of the
images that are part of the dataset.
4.2 COD Techniques
To carry out the study, six different COD techniques
are used (i.e., SINet-v2 (Fan et al., 2021), BGNet
(Chen et al., 2022b), C
2
F-Net(Chen et al., 2022a),
DGNet (Ji et al., 2023), HitNet (Hu et al., 2023), PC-
Net (Yang et al., 2024)). Table 1 shows the com-
parison between different characteristics of each of
the camouflage techniques. With each architecture,
a fine-tuning of 100 epochs is carried out. Most tech-
niques operate with a standard input size of 352×352
pixels, except BGNet, which uses a slightly larger in-
put size of 416×416 pixels. This consistency in input
size among most models suggests a standardized ap-
proach to image processing in this field.
Regarding the backbone architectures, there is a
notable variety in the choices made by different re-
searchers. Three of the techniques (SINet-v2, BGNet,
and C
2
F-Net) utilize Res2Net50 as their backbone
network. PCNet and HitNet opt for PVT-V2 (Pyramid
Vision Transformer V2), while DGNet employs Ef-
ficientNet, showing the diversity in architectural ap-
proaches to the problem.
The number of parameters varies significantly
across these models, ranging from 8.30 million in
DGNet to 77.80 million in BGNet. DGNet stands
out as the most parameter-efficient model with just
8.30M parameters, while BGNet represents the other
extreme with 77.80M parameters. The remaining
models (SINet-v2, PCNet, HitNet, and C
2
F-Net) fall
within a relatively similar range, between 24-28 mil-
lion parameters, suggesting a common sweet spot for
model complexity in this domain.
4.3 Comparisons
The comprehensive evaluation of six different COD
architectures reveals significant insights into their per-
formance in weed detection scenarios.
The quantitative analysis for the dataset described
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
622
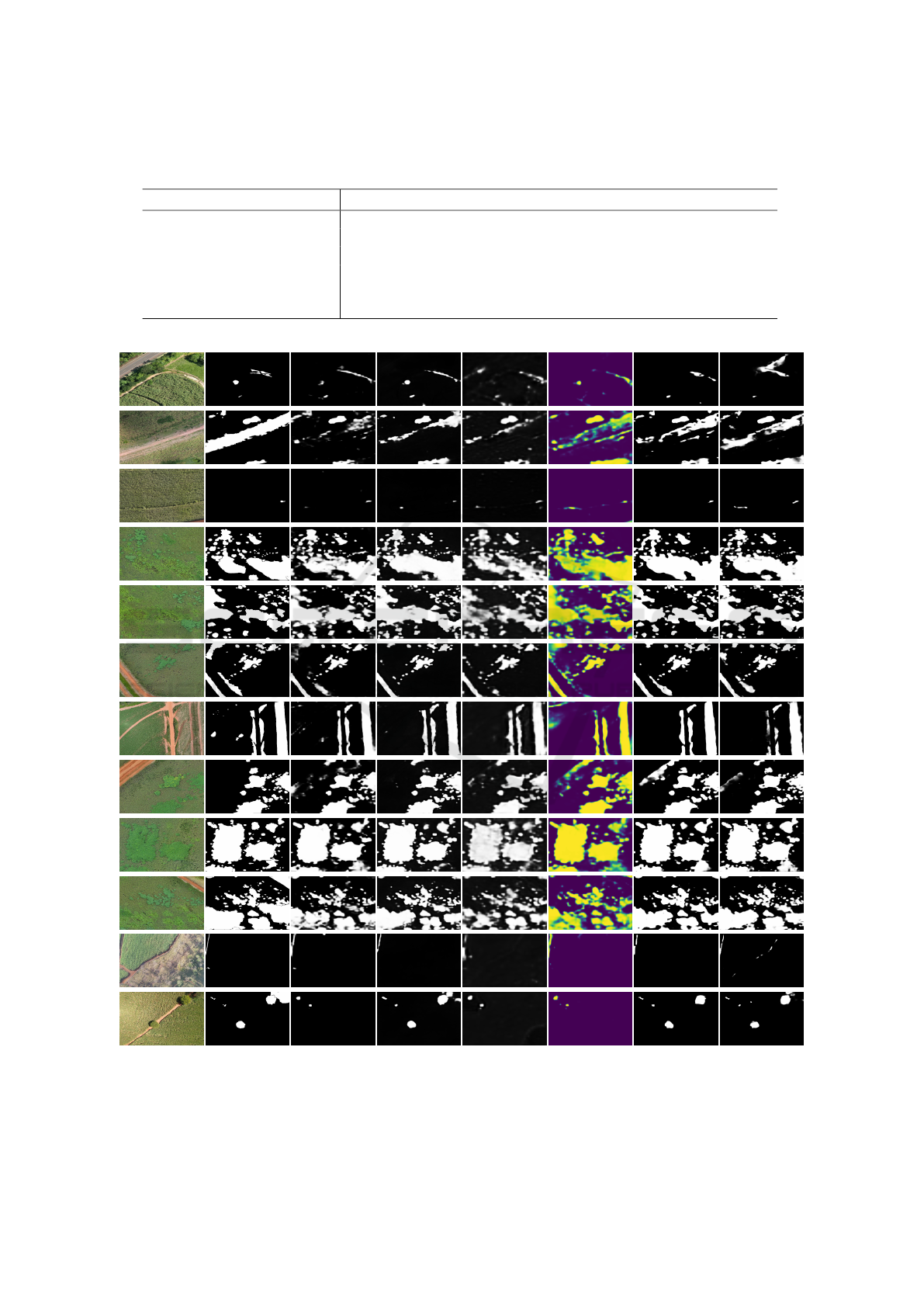
Table 3: Metric evaluation results for each COD techniques using the state-of-the-art datasets (e.g., (Future, 2024a), (Future,
2024b))—notation as presented in Sec. 3.3. Top 3 results are shown in red, blue, and green.
Technique S
α
↑ F
w
β
↑ M ↓ E
mean
φ
↑ E
max
φ
↑ F
mean
β
↑ F
max
β
↑
SINet-v2 (Fan et al., 2021) 0.7251 0.4738 0.0611 0.7943 0.8302 0.5110 0.5358
BGNet (Chen et al., 2022b) 0.7075 0.4468 0.0945 0.8203 0.8922 0.5799 0.6201
C
2
F-Net (Chen et al., 2022a) 0.6297 0.2547 0.1357 0.6557 0.7386 0.3627 0.3962
DGNet (Ji et al., 2023) 0.6931 0.4019 0.0779 0.7481 0.8013 0.4379 0.4621
HitNet (Hu et al., 2023) 0.7631 0.5594 0.0458 0.8617 0.8828 0.5816 0.5972
PCNet (Yang et al., 2024) 0.7612 0.5516 0.0450 0.8517 0.8877 0.5780 0.5938
RGB GT SINet-v2 BGNet C
2
F-Net DGNet HitNet PCNet
Figure 2: Prediction results using different state-of-the-art camouflage techniques. These example UAV images are part of the
testing set (e.g., (Future, 2024a), (Future, 2024b)).
Exploring Camouflaged Object Detection Techniques for Invasive Vegetation Monitoring
623
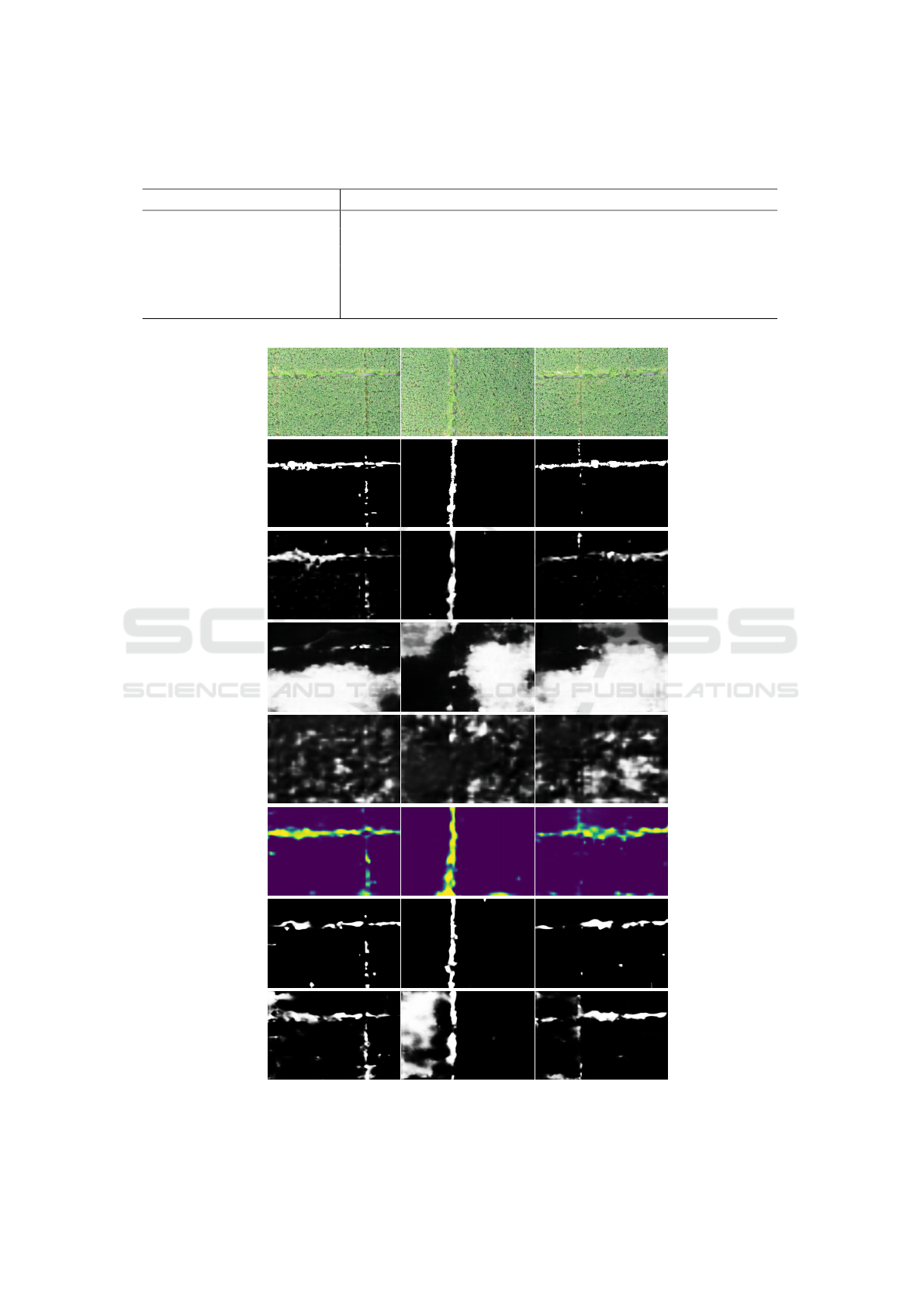
Table 4: Metric evaluation results on banana testing images with the presence of weeds. This is our dataset and consists of
three images. Top 3 results are shown in red, blue, and green.
Technique S
α
↑ F
w
β
↑ M ↓ E
mean
φ
↑ E
max
φ
↑ F
mean
β
↑ F
max
β
↑
SINet-v2 (Fan et al., 2021) 0.7254 0.5228 0.0348 0.8383 0.9631 0.5833 0.6353
BGNet (Chen et al., 2022b) 0.3301 0.0262 0.5185 0.2579 0.8176 0.0311 0.0582
C
2
F-Net (Chen et al., 2022a) 0.4521 0.0528 0.1867 0.5711 0.8206 0.0710 0.0857
DGNet (Ji et al., 2023) 0.7048 0.4341 0.0498 0.8034 0.9489 0.5283 0.6262
HitNet (Hu et al., 2023) 0.8013 0.6280 0.0267 0.9394 0.9692 0.6849 0.6976
PCNet (Yang et al., 2024) 0.6655 0.3199 0.1033 0.7060 0.7848 0.3846 0.4697
Image 1 Image 2 Image 3
RGBGTSINet-v2BGNet
C
2
FNet
DGNet
HitNet
PCNet
Figure 3: Prediction results of test UAV images belonging to banana crops with the presence of weeds. This is our dataset and
consists of three images.
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
624

in Section 4.1 demonstrates that HitNet and PCNet
consistently emerged as the leading performers across
multiple evaluation metrics. HitNet achieved particu-
larly impressive results with a S
α
of 0.7631 and F
w
β
of
0.5594, while PCNet closely follows with comparable
performance metrics. In contrast, C
2
F-Net shows the
lowest performance across most metrics, indicating
potential limitations in its application to weed detec-
tion tasks. The error analysis provides further valida-
tion of these findings, with PCNet and HitNet achiev-
ing the lowest M scores of 0.0450 and 0.0458, respec-
tively. This represents a significant improvement over
C
2
F-Net, which shows the highest error rate with an
M of 0.1357. The substantial difference in M between
the best and worst-performing models (0.0907) shows
the importance of architectural choices in achieving
reliable weed detection results. In terms of boundary
detection, BGNet demonstrates strong performance
with an E
max
φ
of 0.8922, while both HitNet and PCNet
maintain consistent performance across both mean
and maximum metrics. Table 3 shows metric eval-
uation results for each COD technique.
The qualitative analysis through visual results for
the dataset described in Section 4.1 reveals important
practical implications. HitNet and PCNet produce no-
tably clearer boundaries between weed and non-weed
regions, while BGNet shows good boundary detec-
tion but exhibits some over-segmentation tendencies.
SINet-v2 and DGNet demonstrate moderate levels of
false positives, whereas HitNet achieves a better bal-
ance between detection accuracy and false positives.
C
2
F-Net’s tendency to under-detect camouflaged re-
gions suggests limitations in its ability to handle sub-
tle vegetation differences. On the other hand, it is also
important to mention that the first four techniques in
Fig. 2 (i.e., SINet-v2 (Fan et al., 2021), DGNet (Ji
et al., 2023), PCNet (Yang et al., 2024), and HitNet
(Hu et al., 2023)) can identify areas with very low
weed density (see Fig. 2 row 9 to 14) identifying im-
ages where the presence of weeds is below 2% of the
entire image, which indicates a good generalization
capacity of these models for this type of datasets. Fig-
ure 2 shows some illustrations of the results obtained
with the approaches evaluated in the current work.
To test the generalization of the different COD
techniques, a dataset is captured and labeled that in-
cludes three images of banana crops in the presence of
weeds. This dataset is not part of the training stage,
only the pre-trained weights are used to test the gen-
eralization capacity of the architectures. Among the
results obtained in banana crop scenarios, it can be
highlighted the that HitNet significantly outperforms
other models, obtaining the best result in all metrics.
On the other hand, the SINet-v2 and DGNet metrics,
in second and third place respectively, show regu-
lar performance, although not comparable with Hit-
Net. Table 4 shows metric evaluation results on ba-
nana testing images in the presence of weeds. This
specialized performance indicates HitNet’s robust ca-
pability in handling complex agricultural scenarios.
Although BGNet and C
2
F-Net struggle significantly
with banana crop images, SINet-v2 and DGNet main-
tain consistent performance, although PCNet shows
somewhat reduced effectiveness compared to general
testing scenarios. Figure 3 shows the prediction re-
sults of test images belonging to banana crops in the
presence of weeds.
5 CONCLUSIONS
The comprehensive evaluation proposed in this work
of six state-of-the-art COD techniques for weed de-
tection has yielded several significant findings. Hit-
Net and PCNet demonstrate superior performance
in quantitative evaluation metrics for the dataset de-
scribed in Section 4.1, with HitNet achieving the
best overall results. These results can be contrasted
with the qualitative analysis, showing that SINet-v2,
PCNet, and HitNet present visual results where the
weeds are correctly segmented. On the other hand, for
the analysis carried out with images of banana crops
with the presence of weeds, HitNet demonstrated ex-
ceptional performance in this type of scenario, indi-
cating its robust capability of the model in specialized
agricultural contexts despite not having been trained
with images of banana crops and weeds. The sig-
nificant variation in performance across different ar-
chitectures shows the importance of model selection
for specific agricultural applications. In summary, the
success of the application of these COD techniques
in the weed detection context demonstrates the via-
bility of treating weed identification as a camouflage
detection problem, opening new avenues for the field
of precision agriculture.
ACKNOWLEDGEMENTS
This work was supported in part by the Air Force
Office of Scientific Research Under Award FA9550-
24-1-0206; in part by the ESPOL project “Advancing
Camouflaged Object Detection with a cost-effective
Cross-Spectral vision system (ACODCS)” (CIDIS-
003-2024); and in part by the University of Granada.
Exploring Camouflaged Object Detection Techniques for Invasive Vegetation Monitoring
625

REFERENCES
Achanta, R., Hemami, S., Estrada, F., and Susstrunk, S.
(2009). Frequency-tuned salient region detection. In
Conf. on Computer Vision and Pattern Recognition,
pages 1597–1604. IEEE.
Agarwal, R., Hariharan, S., Rao, M. N., and Agarwal, A.
(2021). Weed identification using k-means cluster-
ing with color spaces features in multi-spectral images
taken by uav. In Int. Geoscience and Remote Sensing
Symposium, pages 7047–7050. IEEE.
Balabantaray, A., Behera, S., Liew, C., Chamara, N., Singh,
M., Jhala, A. J., and Pitla, S. (2024). Targeted weed
management of palmer amaranth using robotics and
deep learning (yolov7). Frontiers in Robotics and AI,
11:1441371.
Chauhan, B. S., Matloob, A., Mahajan, G., Aslam, F., Flo-
rentine, S. K., and Jha, P. (2017). Emerging challenges
and opportunities for education and research in weed
science. Frontiers in plant science, 8:1537.
Chen, G., Liu, S.-J., Sun, Y.-J., Ji, G.-P., Wu, Y.-F., and
Zhou, T. (2022a). Camouflaged object detection via
context-aware cross-level fusion. Transactions on Cir-
cuits and Systems for Video Technology, 32(10):6981–
6993.
Chen, T., Xiao, J., Hu, X., Zhang, G., and Wang, S. (2022b).
Boundary-guided network for camouflaged object de-
tection. Knowledge-based systems, 248:108901.
Coleman, G. R., Bender, A., Walsh, M. J., and Neve, P.
(2023). Image-based weed recognition and control:
Can it select for crop mimicry? Weed Research,
63(2):77–82.
Fan, D.-P., Cheng, M.-M., Liu, Y., Li, T., and Borji, A.
(2017). Structure-measure: A new way to evaluate
foreground maps. In Int. Conf. on Computer Vision,
pages 4548–4557.
Fan, D.-P., Gong, C., Cao, Y., Ren, B., Cheng, M.-M., and
Borji, A. (2018). Enhanced-alignment measure for bi-
nary foreground map evaluation. arXiv.
Fan, D.-P., Ji, G.-P., Cheng, M.-M., and Shao, L. (2021).
Concealed object detection. Transactions on Pat-
tern Analysis and Machine Intelligence, 44(10):6024–
6042.
Future (2024a). Machine segmentation dataset.
https://universe.roboflow.com/future-cn6m4/
machine-segmentation. visited on 2024-12-27.
Future (2024b). Weed segmentation dataset.
https://universe.roboflow.com/future-cn6m4/
weed-segmentation-mjudm. visited on 2024-12-
27.
Gao, S.-H., Cheng, M.-M., Zhao, K., Zhang, X.-Y., Yang,
M.-H., and Torr, P. (2019). Res2net: A new multi-
scale backbone architecture. Transactions on Pattern
Analysis and Machine Intelligence, 43(2):652–662.
Hu, X., Wang, S., Qin, X., Dai, H., Ren, W., Luo, D.,
Tai, Y., and Shao, L. (2023). High-resolution iterative
feedback network for camouflaged object detection.
In AAAI Conf. on Artificial Intelligence, volume 37,
pages 881–889.
Ji, G.-P., Fan, D.-P., Chou, Y.-C., Dai, D., Liniger, A., and
Van Gool, L. (2023). Deep gradient learning for effi-
cient camouflaged object detection. Machine Intelli-
gence Research, 20(1):92–108.
L
´
opez-Granados, F., Jurado-Exp
´
osito, M., Pe
˜
na-Barrag
´
an,
J. M., and Garc
´
ıa-Torres, L. (2006). Using remote
sensing for identification of late-season grass weed
patches in wheat. Weed Science, 54(2):346–353.
Margolin, R., Zelnik-Manor, L., and Tal, A. (2014). How
to evaluate foreground maps? In Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
Moldvai, L., Ambrus, B., Teschner, G., and Ny
´
eki, A.
(2024). Weed detection in agricultural fields using ma-
chine vision. In BIO Web of Conferences, volume 125.
EDP Sciences.
Parra, L., Marin, J., Yousfi, S., Rinc
´
on, G., Mauri, P. V., and
Lloret, J. (2020). Edge detection for weed recognition
in lawns. Computers and Electronics in Agriculture,
176:105684.
Perazzi, F., Kr
¨
ahenb
¨
uhl, P., Pritch, Y., and Hornung, A.
(2012). Saliency filters: Contrast based filtering for
salient region detection. In Conf. on Computer Vision
and Pattern Recognition, pages 733–740. IEEE.
Rehman, M. U., Eesaar, H., Abbas, Z., Seneviratne, L.,
Hussain, I., and Chong, K. T. (2024). Advanced
drone-based weed detection using feature-enriched
deep learning approach. Knowledge-Based Systems,
305:112655.
Singh, V., Singh, D., and Kumar, H. (2024). Efficient appli-
cation of deep neural networks for identifying small
and multiple weed patches using drone images. Ac-
cess.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional Conference on Machine Learning, pages 6105–
6114. PMLR.
Tang, J., Wang, D., Zhang, Z., He, L., Xin, J., and Xu, Y.
(2017). Weed identification based on k-means feature
learning combined with convolutional neural network.
Computers and electronics in agriculture, 135:63–70.
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang, D.,
Lu, T., Luo, P., and Shao, L. (2022). Pvt v2: Improved
baselines with pyramid vision transformer. Computa-
tional Visual Media, 8(3):415–424.
Westwood, J. H., Charudattan, R., Duke, S. O., Fennimore,
S. A., Marrone, P., Slaughter, D. C., Swanton, C., and
Zollinger, R. (2018). Weed management in 2050: Per-
spectives on the future of weed science. Weed science,
66(3):275–285.
Wu, Z., Chen, Y., Zhao, B., Kang, X., and Ding, Y. (2021).
Review of weed detection methods based on computer
vision. Sensors, 21(11):3647.
Yang, J., Wang, Q., Zheng, F., Chen, P., Leonardis, A., and
Fan, D.-P. (2024). Plantcamo: Plant camouflage de-
tection. arXiv.
DATA 2025 - 14th International Conference on Data Science, Technology and Applications
626
