
Computer Vision-Based Smart Artificial Hand for Upper Limb Amputee
Anish Sambhare, Ajay Lohar, Rushank Suryawanshi and Narendra Bhagat
Department of Electronics and Telecommunication Engineering,
Bharatiya Vidya Bhavan’s Sardar Patel Institute of Technology, India
Keywords:
Convolutional Nueral Network(CNN), Prosthetic Hand Control, Machine Learning Algorithms, Feature
Extraction, Real Time Applications, Cost-Effective Prosthetics.
Abstract:
This study introduces a novel approach for classifying grips in prosthetic hands to facilitate object manipula-
tion using Convolutional Neural Networks (CNN). The experimental findings indicate that this method outper-
forms traditional learning models. Initially, three machine learning algorithms were assessed: Decision Tree,
SVM, and Random Forest, to classify various objects such as bottles, cell phones, and cups. The classifica-
tion accuracies achieved were 76%, 90%, and 95%, respectively. Traditional machine learning preprocessing
techniques proved to be quite complex, making CNNs a more attractive option due to their ability to perform
feature extraction and classification without the need for extensive preprocessing. The CNN developed in this
study achieved a training accuracy of 99% and a testing accuracy of 97.5%, surpassing contemporary mod-
els like YOLO v3 and Faster R-CNN. The integration of data-augmented training and dropout regularization
enhances the model’s robustness and generalizability. This allows the prosthetic hand to achieve precise grip
control in a cost-effective and sensor-free manner, making the system a dependable choice for real-time appli-
cations, thereby improving accessibility and functionality in prosthetic design.
1 INTRODUCTION
A prosthetic hand serves as an important device for
the upper limb amputation as it allows a person to
perform activities of daily living and regain some
motor functions, such as the ability to grasp an ob-
ject. Enhanced quality of life and independence, im-
proved psychological well-being, promotion of self-
confidence and social assimilation, and the ability to
use and move in everyday settings are their benefits.
AI technology makes prosthetics more human-
like through sensory feedback, better prediction, and
intuitive motion, thus, amputees can do complicated
tasks and their lives are improved (Chopra and Em-
ran, 2024).Computer vision, one of the AI wings,
is the key to making machines able to visually an-
alyze the data thus, the robots can do functions
such as image processing, object recognition, and
tracking very quickly and precisely (Kutlugun and
Ey
¨
upo
˘
glu, 2020).This paper deals with the develop-
ment of CNN, architectures, applications in different
dimensions, problems like generalization and secu-
rity, as well as ways forward and hardware imple-
mentation (S
,
tefan–Adrian Ionescu and Poboroniuc,
2023).
This work presents “Action Image” for robotic
grasping, accomplishing 84% best-case success in
the real world through a CNN employing simula-
tions with RGB, Depth, and RGB-D inputs (Somer
M. Nacy and Baqer, 2017).The proposed study
presents a two-stage CNN-based strategy for object
detection and appearance synthesis, which in turn, en-
hances accuracy, explainability, and real-time capa-
bilities of robotics in comparison to other techniques
like PoseCNN or DOPE, such as pose estimation (Xi-
aotong Chen and Jenkins, 2019).
This project introduces an affordable 3D-printed
upper limb prosthetic from recycled materials that is
able to perform essential movements like gripping
and rotating (Zewen Li and Zhou, 2021).Catalyzed by
the discovery of the high expenditure required for my-
oelectric prosthetics, this lightweight, low-power ar-
tificial limb applies electromyography (EMG) signal
processing and 3D printing. Meanwhile, continued
development of the EMG scheme, biocompatible ma-
terials, compact motors, and stable power will bring
it towards commercialization (Divya Pradip Roy and
Hoque, 2021).
The main contribution of this research are as fol-
lows.
1. A cost-efficient computer vision-based artificial
Sambhare, A., Lohar, A., Suryawanshi, R. and Bhagat, N.
Computer Vision-Based Smart Artificial Hand for Upper Limb Amputee.
DOI: 10.5220/0013619200004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 413-419
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
413

hand, leveraging advancements in deep learning,
embedded systems, and convolutional neural
networks (CNNs).
2. The proposed system integrates a camera module
for real-time object detection, classification,
and grip formation, ensuring affordability and
reduced maintenance.
3. By enabling precise and responsive control
through a computer vision-based approach, this
solution enhances user interaction, functionality,
and mobility, addressing key limitations of tradi-
tional prosthetics.
2 RELATED WORK
Many Studies have been carried out to investigate the
development of prosthetic hands with artificial intelli-
gence, using different technologies and approaches to
extend their functionality. These research works ex-
plore various ways to merge the newest AI methods
to make the hands more controllable, adaptable, and
overall functional, contributing significantly to the in-
dustry’s progress.
In the research by (Ujjwal Sharma and Singh,
2023), object detection developments are explored,
with YOLO being a main focus. Faster R-CNN
ResNet was able to reach 77.4% mAP at 6 FPS, while
YOLO v2 paired with a (416x416) resolution had an
equal value of accuracy (77.2%) and speed (68 FPS).
Later, YOLO v2 was upgraded to 78.4% mAP at 60
FPS (480x480). YOLO v3, which also used DarkNet-
53 like ResNet-50, showed equivalent accuracy but
was faster. Dataset specifics are not provided.
(Xia Zhao and Parmar, 2024) discussed the enor-
mous contributions of Convolutional Neural Net-
works (CNNs) in improving computer vision tasks
such as image classification, object detection, and
video prediction. CNNs surpass traditional methods
by delivering accurate results. The challenges in this
field involve training with large datasets, model com-
plexity, and high computational cost. Future research
will focus on optimizing architectures and reducing
the dependency on labeled data to improve perfor-
mance.
(Ross Girshick and Malik, 2014) introduced a
straightforward and reliable object detection method
designed to work with CNNs, evaluated on the PAS-
CAL VOC 2011 and 2012 datasets. The model im-
proved mAP by more than 30% and achieved 47.9%
accuracy in the segmentation task. This approach, in-
tegrating CNNs and region proposals, offers a fast al-
ternative to more complicated ensemble systems.
(Chunyuan Shi and Liu, 2020) explored CNNs
for recognizing grasp patterns in prosthetic hands,
reporting mono-modal accuracies of 80% for RGB,
85.4% for grayscale, and 89.8% for depth images.
The fusion of grayscale and depth data increased the
recognition rate to 94.6%. Additionally, Vision-EMG
achieved a 50% reduction in grasp-and-pick-up time
compared to Coded-EMG, highlighting superior per-
formance.
(Meena Laad and Saiyed, 2024) compared two
object detection CNNs: SSD with MobileNetV1
and Faster-RCNN with InceptionV2, using a custom
dataset of 444 images (355 for training, 89 for test-
ing). While SSD was faster, it showed inferior per-
formance compared to Faster-RCNN, which, though
slower, was more accurate.
(Shripad Bhatlawande and Gadgil, 2023) con-
ducted research into robotic grasping using RGB-D
data. The study utilized the Cornell Grasp Dataset and
applied graph segmentation and morphological image
processing (MIP) with a Random Forest (RF) classi-
fier. The method achieved 94.26% accuracy in grasp-
ing detection, outperforming other algorithms in both
speed and accuracy.
(Douglas Morrison and Leitner, 2020) introduce
the EGAD dataset, a more diverse tool for assessing
robot arm interactions with objects, particularly for
grasp-centric tasks. The GG-CNN algorithm associ-
ated with EGAD succeeds 58% of the time, indicating
the challenges of natural grasp depth and orientation.
More complex datasets like EGAD show greater limi-
tations, offering opportunities for algorithm improve-
ment.
(Cloutier and Yang, 2013) revisit various pros-
thetic hand control techniques, focusing on antici-
patory pattern recognition, fuzzy clustering, neural
networks, and ENG control. The study uses EMG
signals for motion classification, achieving accuracy
rates between 86% and 98%. ENG interfaces provide
a more natural control method through the Peripheral
Nervous System.
3 METHODOLOGY
3.1 Data Collection
The step of collecting data is video shooting of objects
in the real world which will be interpreted by a com-
puter vision model as grip recognition through, they
are further processed into 300 frames of 15-second
length, to make sure that the data is of good quality.
These frames are classified among power grip, preci-
sion, grip or pinch grip.
Class A: Power Grip – Utilized mostly by objects
INCOFT 2025 - International Conference on Futuristic Technology
414

Figure 1: Frame Extraction and Classification Flowchart.
Figure 2: Dataset
such as bottles, which require a strong, whole-hand
grasp to be effectively handled.
Class B: Precision Grip – The hugs used for phones
which require a delicate firm grip by means of only
the thumb and fingers.
Class C: Pinch Grip – Small objects, such as cups,
have to follow a more gentle fingertip grip.
Fig. 1 shows the frame extraction and classification
flowchart.
The categorization data is absolutely necessary for
teaching a robot vision model to 1) detect objects, 2)
pick out suitable gripping methods, and 3) alter hand
configurations so that physical interaction with the
real world is smooth.
Hence Fig. 2 shows the dataset collected.
3.2 Model Training
1. Data Processing : There are three groups of im-
ages of bottles, cups, and mobiles that are both used
during training (70%), validation (15%), and test-
ing (15%) to ensure the model is trained, validated,
and performs well while avoiding overfitting. Data
augmentation is used, such as rotations, movements,
magnifications, and flips, and suddenly the model
learns how to be able to deal with different data, and
normalization is also applied during preprocessing.
Pixel intensity values initially populated the range of
0 to 255 are brought to the interval 0–1 using Equa-
tion:
I
norm
=
I
255
(1)
where ( I = pixel intesity ) Normalization guaran-
tees that the input scaling is consistent and in this way,
the speed of convergence is increased and the numer-
ical instability is reduced during training.The model
receives the pre-processed data in mini-batches,
where the images are resized to 224x224 pixels for
memory efficiency and consistency.
In CNN, Convolutional layers are responsible for
feature extraction from input images. The convolu-
tion operation is mathematically represented as:
Y [i, j] =
∑
m
∑
n
X[i + m, j + n]· K[m, n] (2)
where X is the input, K is the kernel, and Y is
the output.Deeper CNN layers are capable of learn-
ing high-level features, such as object parts, through
complex convolutions for recognition.
Max pooling is a layer of deep learning networks
that cut down the image dimensions while yet being
able to maintain dimensionality. This can be seen as:
Y [i, j] = max(X[m, n]) (3)
Max pooling brings about the reduction of the
computational cost, the prevention of overfitting, and
the provision of spatial invariance, reference is made
to categorical cross-entropy which is the loss function
used during training is given by:
L = −
C
∑
c=1
y
c
· log(p
c
) (4)
where C is the number of classes, y
c
is the actual la-
bel, and p
c
is the probability of the predicted class be-
ing correct. This particular loss is very well-suited for
multi-class classification, as it punishes the incorrect
predictions more hard, thus leading to a better accu-
racy rate.The last layer in the CNN has the softmax
Computer Vision-Based Smart Artificial Hand for Upper Limb Amputee
415

activation function applied and subsequently, it con-
verts the logits into probabilities of respective classes:
p
c
=
e
z
c
∑
C
j=1
e
z
j
(5)
So, z
c
stands for the class score of the observation, c.
Softmax is probabilistic and hence, fits the process of
multi-class classification.
A specific CNN pipeline guarantees the model is
trained on both seen and unseen data, thus it leads to
accurate and flexible grasp detection.
‘
2. Training Algorithm : The algorithm is trained
through supervised learning for image classification
and it consists of three phases: data preparation,
model training, and evaluation with CNN that is
used for feature extraction and spatial hierarchy
capture. The testing of the model and its reliability
for object detection is done after the training. Thus,
the following algorithm ensure that the model also
performs well on unseen data.
Algorithm 1 CNN Framework
1:Input : Dataset containing images of bottles,
cups, and mobiles
2:Output : GripType → A (Power), B (Precision), C
(Pinch)
3: Initialize IMAGE SIZE = (224, 224),
BATCH SIZE = 32
4: Split DT into DT
train
, DT
valid
, and DT
test
with
Train:Val:Test ratio = 35:35:30
5: for each image in DT do
6: DT
preprocessed
= ImagePreprocessing(DT)
7: Rescale pixel values to [0,1]
8: Apply data augmentation (rotation, shift,
shear, zoom, flip) for training set
9: Resize images to IMAGE SIZE
10: end for
11: Initialize CNN model with Conv2D layers (32,
64, 128 filters), MaxPooling2D layers, Flatten layer,
Dense layers (128 neurons, 3 output classes), and
Dropout (0.5)
12: Train CNN
model
using DT
train
13: Optimize using Adam optimizer
14: Use categorical crossentropy loss
15: Train for specified epochs
16: while True do
17: PredictedGripType = CNN
model
(DT
test
)
18: if prediction confidence > threshold then
19: Return grip type (power/precision/pinch)
20: else
21: Return error
22: end if
23: end while
Function: ImagePreprocessing(DT)
24: for each image in DT do
25: Normalize pixel values
26: Resize to IMAGE SIZE
27: if training set then
28: Apply augmentation
29: end if
30: Return preprocessed image
31: end for
3.3 Hardware Integration
The hardware integration for the artificial hand sys-
tem facilitated smooth interaction between the control
system and the servo motors that manage hand move-
ments. Initially, specific controllers were selected for
both internal and external operations, but issues with
memory limitations and library compatibility affected
performance. These obstacles led the design team to
explore alternative solutions, which improved the sys-
tem’s hardware and software capabilities.
The answer was a new driver-based approach that
allowed seamless communication between the control
system and the servo motors. This advancement en-
abled precise and autonomous movements of the fin-
gers and thumb. The driver served as a calibrated con-
trol solution, addressing the shortcomings of the orig-
inal controller and greatly enhancing reliability and
efficiency. This transformation, depicted in Fig. 3,
illustrates the overall project concept and emphasizes
the driver’s essential role in achieving high-level per-
formance.
The Python program analyzed classification out-
puts to manage hand movements, allowing for various
grips such as the power grip, precision grip, and pinch
grip. The system dynamically modified grip shapes
and sizes based on the objects detected, ensuring nat-
ural and accurate manipulation. This feature enabled
the artificial hand to replicate human hand motions,
improving usability for upper-limb amputees.
The system setup, detailed in Fig. 4, consisted of a
desktop computer running the software, testing hard-
ware, a camera module, and a power supply unit. The
prosthetic hand included servo motors and internal
mechanisms, showcasing the collaboration between
mechanics and electronics.
This innovative integration resulted in a respon-
sive and adaptable artificial hand, capable of execut-
ing a range of tasks with precision. It enhanced the
user experience by supporting natural hand move-
ments, making it highly functional for amputees.
INCOFT 2025 - International Conference on Futuristic Technology
416
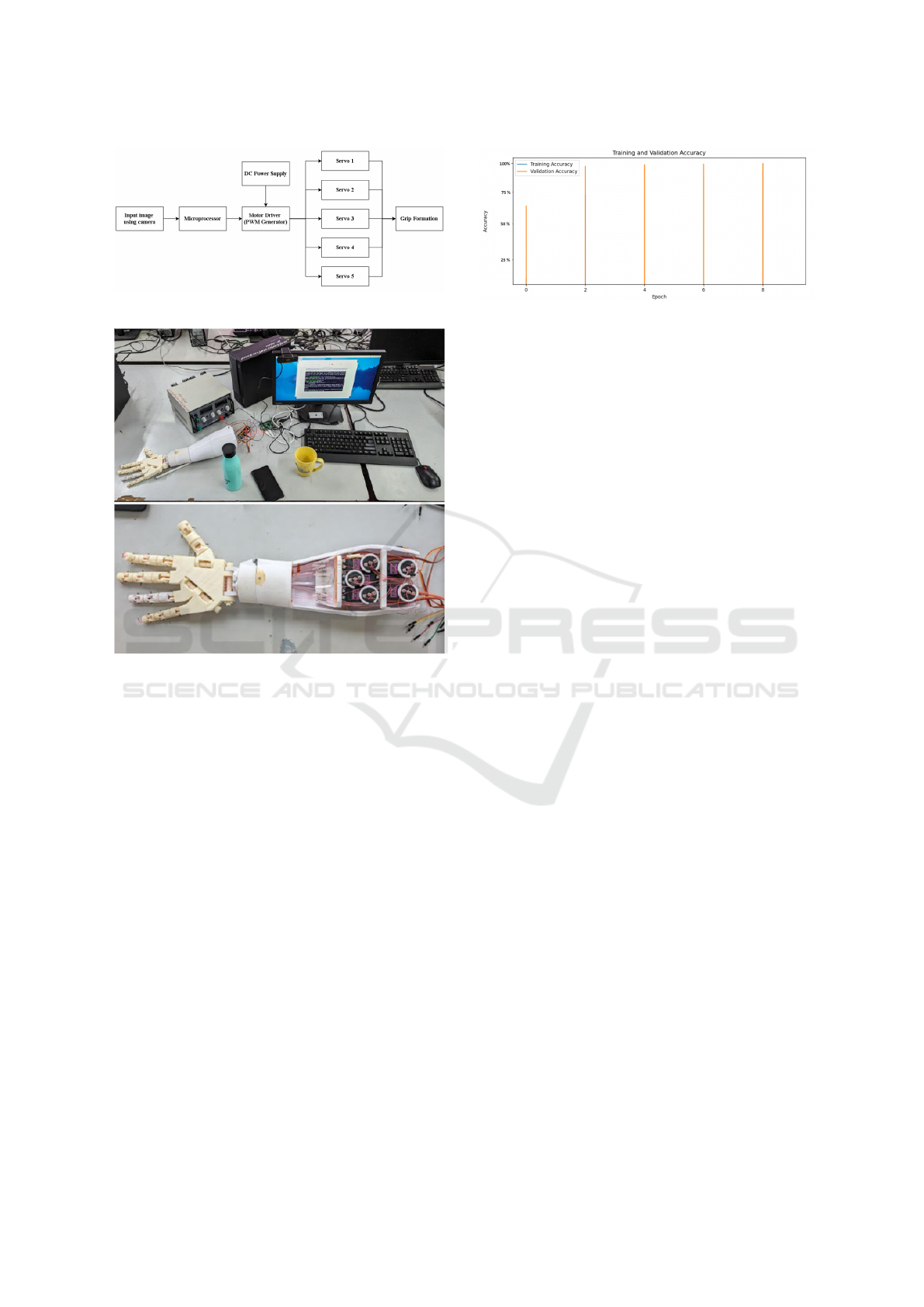
Figure 3: System Flow Diagram
Figure 4: System Setup
4 RESULTS AND DISCUSSIONS
Originally, the model was initialized with three image
categories including those of bottles, cell phones, and
cups acquired from a database via the use of machine
learning algorithms namely Decision Tree, Support
Vector Machine (SVM), and Random Forest. Respec-
tive accuracies of 76%, 90%, and 95% were recorded,
with Random Forest being the best among the three
in the classification results. Nonetheless, the image
extraction and pre-processing steps were best with
obstacles, Proper pre-processing —using suitable pa-
rameters—was the main criterion for motivating the
disambiguation of the images into the fewer, most pe-
culiar types. Although some modifications have been
made, a few images were incorrectly identified be-
cause of insufficient preprocessing. This erratic be-
havior shows a view of the flaws of the typical ma-
chine learning methods while handling the complex
image datasets in cases where the dynamic prepro-
cessing pipelines are required. This turned the atten-
tion to deep learning methods, which by definition in-
clude feature extraction and classification, thus mak-
ing preprocessing the least necessary.
Figure 5: Model Accuracy
The Convolutional Neural Networks (CNNs) ar-
chitecture was utilized to minimize the drawbacks of
conventional machine learning techniques. CNNs are
employed due to their ability of high-accuracy image
classification as well as their usability in real-time
applications for CNNs. There were many convolu-
tions over the initial layers with ReLU as the acti-
vation function, max-pooling layers, and fully con-
nected layers optimized for feature extraction and
classification part. Using this approach significantly
reduced preprocessing while simultaneously enhanc-
ing categorization accuracy. CNNs are also “plug-n-
play” systems whereby they can be embedded in other
systems thus efficiently working dependably in real-
time situations, as confirmed by the studies already
done.
Online learning algorithms such as the Decision
Tree, SVM, and the Random Forest have glorious
performance over structured datasets but they require
plenty of preprocessing along the way and have se-
rious problems when it comes to image data. Deep
learning, particularly CNNs, not only feature extrac-
tion and classification together but also almost less
preprocessing while still giving better results and be-
ing more reliable than other methods. CNNs are the
best alternative for systems of information flow charts
and AI supervised applications, which are ensured by
their adaptability and dependability. Thus,CNN is de-
ployed as an architecture because its superiority and
flexibility are the two main reasons.
The proposed Convolutional Neural Network
(CNN) model exhibited best-in-class performance in
object grip classification, obtaining a training accu-
racy of 99% after only 10 epochs. This high accuracy
points to the power of the selected architecture to ex-
tract the subtle visual features necessary for perfect
object classification. The model employs the tech-
nique of multi-layer feature extraction in which lay-
ers become smaller, first of all, it detects low-level as-
pects and then proceeds to higher contextual signals.
Hence, dropout regularization, in addition to improv-
ing the model’s generalizability, mitigated the over-
fitting, which was shown by the consistently smooth
validation accuracy values in the training process.The
Computer Vision-Based Smart Artificial Hand for Upper Limb Amputee
417

Table 1: Comparison of Proposed CNN Model with Refer-
ence Literature
Model Accuracy
CNN Model (This Study) 97.5% (Test)
YOLO v2
1
77.2%
YOLO v3
1
77.2%
Faster R-CNN
1
93%
ResNet 93.75
1
%
CNNs (General)
2
93%
CNNs Region Proposals
3
94.6%
CNNs for Grasp Recognition
4
94.6%
Faster R-CNN with MobileNetV1
5
94.26%
1
(Ujjwal Sharma and Singh, 2023)
2
(Xia Zhao and Parmar, 2024)
3
(Ross Gir-
shick and Malik, 2014)
4
(Chunyuan Shi and Liu, 2020)
5
(Meena Laad and
Saiyed, 2024)
Figure 6: Output Prediction
testing phase confirmed the model’s strength in real
situations, as it reached out to an accuracy of 97.5%
with the symmetrical loss of 0.05. These results re-
flect the algorithm’s capability to maintain a balance
between precision and efficiency, hence, it is a go-to
for real-time prosthetic grip detection systems. The
utilization of data augmentation methods, among the
most reliable techniques, has substantially sustained
the model against changes such as shifting, resizing,
and illumination. Fig. 5 shows models training and
validation accuracy.
With a CNN model proposed, the results are far
better than other state-of-the-art models located in the
literature. Showing a training accuracy of 99% and a
testing accuracy of 97.5%, the CNN model competes
by offering better performances than YOLO, Faster
R-CNN, and other deep learning structures. The ca-
pability of better accuracy with less preprocessing is
a very effective option in real-time applications for
example in the case of prosthetics hand control sys-
tems which need to be controlled by the user. Fig.
6 confirms how the model does deal with real-world
objects’ classification and, thus, perfectly gives the
proof of the proposed method’s distinguishing differ-
ent object types.
The most noteworthy aspect of the proposed sys-
tem is its smart computer vision-based prosthetic
hand that accurately replicates many different hand
movements including power grip, precision grip, and
pinch grip. The CNN model’s high accuracy allows
not only the work in the software domain but also
the control of the prosthetic hand. Hence, embed-
ded systems as well as software domains have their
own standout. The embedded system acts as a ma-
jor player in achieving short and hence fast process-
ing time and high functionality of the actuator system,
making the control of the prosthetic hand completely
transparent. If compared to the real sensor-based sys-
tems that employ EMG sensors, which can be quite
costly and susceptible to failures, the addition of a
camera that will detect grips gives the main advan-
tage. Among them, the camera-based solution gives a
cost-effective option maintaining high precision with-
out resorting to bulky sensors, and this improves both
robustness and reliability. This unique way of doing
visual and embedded systems engineering work is a
real option for the smart prosthetic hands develop-
ment that becomes usual in these cases.
5 CONCLUSIONS
The intended addition to this study is a robust method-
ology, which leads to grip classification for prosthetic
hands using the celebrated power of Convolutional
Neural Networks (CNNs). During the early phases of
the study, conventional classification techniques like
Decision Tree, Support Vector Machine (SVM), or
Random Forest were studied, producing a 76%, 90%,
and 95% accuracy, respectively. However, they re-
quired too much preprocessing and failed to manage
image datasets.
By using CNNs, we can overcome the preprocess-
ing burden: there is no need for an extra feature ex-
tractor because of the inherent feature extraction and
classification capabilities of CNNs, thus increasing
efficiency and accuracy. This architecture stands with
a surreal 99% training accuracy and 97.5% testing ac-
curacy on a proposed model superior to state-of-the-
art models such as YOLO v3 and Faster R-CNN. It
is dropout regularization and data augmentation that
guarantees that the model is robustly generalized to
handle different conditions in the environment and
dynamics of objects.
The application area of this CNN-based model
goes beyond controlling a prosthetic hand and appears
instead to be real-time applications, such as in robots,
assistive devices, and automation systems, where ac-
curacy and flexibility are essential. Cost-effectiveness
would increase access and utility, as expensive sen-
sors would be replaced by affordable vision-based
methods.
As such, this study suggests the promise of CNNs
over conventional methods for grip classification in
quality with very reliable, real-time, low-cost solu-
INCOFT 2025 - International Conference on Futuristic Technology
418

tions towards prosthetics and beyond. This aspect will
make for future work towards optimizing this system
in conjunction with advanced embedded systems to
boost performance and real-world application enable-
ment.
REFERENCES
Chopra, S. and Emran, T. B. (2024). Advances in ai-
based prosthetics development: Editorial. Journal of
Biomedical Research.
Chunyuan Shi, Dapeng Yang, J. Z. and Liu, H. (2020).
Computer vision-based grasp pattern recognition with
application to myoelectric control of dexterous hand
prosthesis. IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 28(9):2090–2099.
Cloutier, A. and Yang, J. J. (2013). Control of hand pros-
theses: A literature review. In Proceedings of the
ASME 2013 International Design Engineering Tech-
nical Conferences and Computers and Information in
Engineering Conference. ASME.
Divya Pradip Roy, Md Zahirul Alam Chowdhury, F. A. and
Hoque, M. E. (2021). Design and development of
a cost-effective prosthetic hand for upper limb am-
putees. In 2021 Biomedical Engineering International
Conference (BMEiCON-2021). IEEE.
Douglas Morrison, P. C. and Leitner, J. (2020). Egad! an
evolved grasping analysis dataset for diversity and re-
producibility in robotic manipulation. IEEE Robotics
and Automation Letters, 5(3):4368–4375.
Kutlugun, E. and Ey
¨
upo
˘
glu, C. (2020). Artificial intelli-
gence methods used in computer vision. In 2020 5th
International Conference on Computer Science and
Engineering (UBMK), pages 214–218. IEEE.
Meena Laad, R. M. and Saiyed, N. (2024). Unveiling the
vision: A comprehensive review of computer vision
in ai and ml. In 2024 International Conference on
Advances in Data Engineering and Intelligent Com-
puting Systems (ADICS). IEEE.
Ross Girshick, Jeff Donahue, T. D. and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In 2014 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 580–587. IEEE.
Shripad Bhatlawande, Swati Shilaskar, U. D. and Gadgil, V.
(2023). Grip-vision: Enhancing object handling with
computer vision-based grip classification. In 2023 2nd
International Conference on Futuristic Technologies
(INCOFT). IEEE.
Somer M. Nacy, M. A. T. and Baqer, I. A. (2017). A novel
approach to control the robotic hand grasping process
by using an artificial neural network algorithm. In
Journal of Intelligent Systems, volume 26, pages 215–
231. De Gruyter.
Ujjwal Sharma, T. G. and Singh, J. (2023). Real-time im-
age processing using deep learning with opencv and
python. Journal of Pharmaceutical Negative Results,
14:1905–1908.
Xia Zhao, Limin Wang, Y. Z. X. H. M. D. and Parmar, M.
(2024). A review of convolutional neural networks in
computer vision. Artificial Intelligence Review, 57:99.
Xiaotong Chen, Rui Chen, Z. S. Z. Y. Y. L. R. I. B. and
Jenkins, O. C. (2019). Grip: Generative robust infer-
ence and perception for semantic robot manipulation
in adversarial environments. In 2019 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems (IROS), pages 3988–3995. IEEE.
Zewen Li, Fan Liu, W. Y. S. P. and Zhou, J. (2021). A sur-
vey of convolutional neural networks: Analysis, appli-
cations, and prospects. IEEE Transactions on Neural
Networks and Learning Systems, 33(12):6999–7019.
S
,
tefan–Adrian Ionescu and Poboroniuc, M. (2023). 3d
printed upper limb prosthesis controlled by the healthy
hand. In 2023 IEEE Conference on Robotics and Au-
tomation. IEEE.
Computer Vision-Based Smart Artificial Hand for Upper Limb Amputee
419
