Parameter Estimation of PID Controller Using Machine Learning
Tanuja R Pathare, Masud Akatar, Abdul Mateen Abdul Hai Momin, Rajeev Ranjan Pathak,
Leah S Joshi and Pooja Chandaragi
KLE Technological University, Electrical and Electronics Engineering, Huballi, Karnataka, India
Keywords:
Machine Learning, Deep Learning, PID Controller.
Abstract:
DL (Deep Learning) method of approach towards PID (Proportional-Integral-Derivative) parameter tuning is
inspired by the improvisation of Ziegler-Nichols method and linear regression. For any varying values of
characteristics of a PID controller i.e, Ess (Steady State Error), peak overshoot, settling time, and rise time; a
unique solution is obtained for k
p
, k
i
, and k
d
. This is demonstrated by the means of a more efficient method
which is DL. Research is proposed to acknowledge which of the three mentioned methods provides the best
fit for a model.Using the older methods for PID parameter tuning can be proven to slower the rate of process
or cause human error. Hence, to avoid this an advanced tuning method is proposed via machine learning
1 INTRODUCTION
A PID controller is widely used in control systems
and industrial applications due to its flexibility and
versatility. The history began since 1911 when the
first evolution of PID controller was developed by
Elmer Sperry. Popularity grew when Ziegler and
Nichols tuning rules were brought into the limelight.
However, it came with back-leashes such as time
consumption, and the method does not guarantee
reaching a robust and stable solution; hence, to over-
come the cons, a much efficient and advanced method
is proposed using machine learning. In this paper,
three methods of PID controller parameter tuning are
collated, namely Ziegler-Nichols, linear regression
and DL.
2 LITERATURE SURVEY
2.1 Survey on PID Controller Tuning
Using Machine Learning
PID controllers are a staple in industrial control sys-
tems due to their simplicity and effectiveness. How-
ever, manual tuning of PID parameters can be time-
consuming and inefficient, especially in complex sys-
tems. ML (Machine Learning) techniques, such as
DL and reinforcement learning, are increasingly be-
ing employed to automate and enhance PID tuning.
These approaches promise adaptive, efficient, and ro-
bust performance across various applications(Rahmat
et al., 2023) .
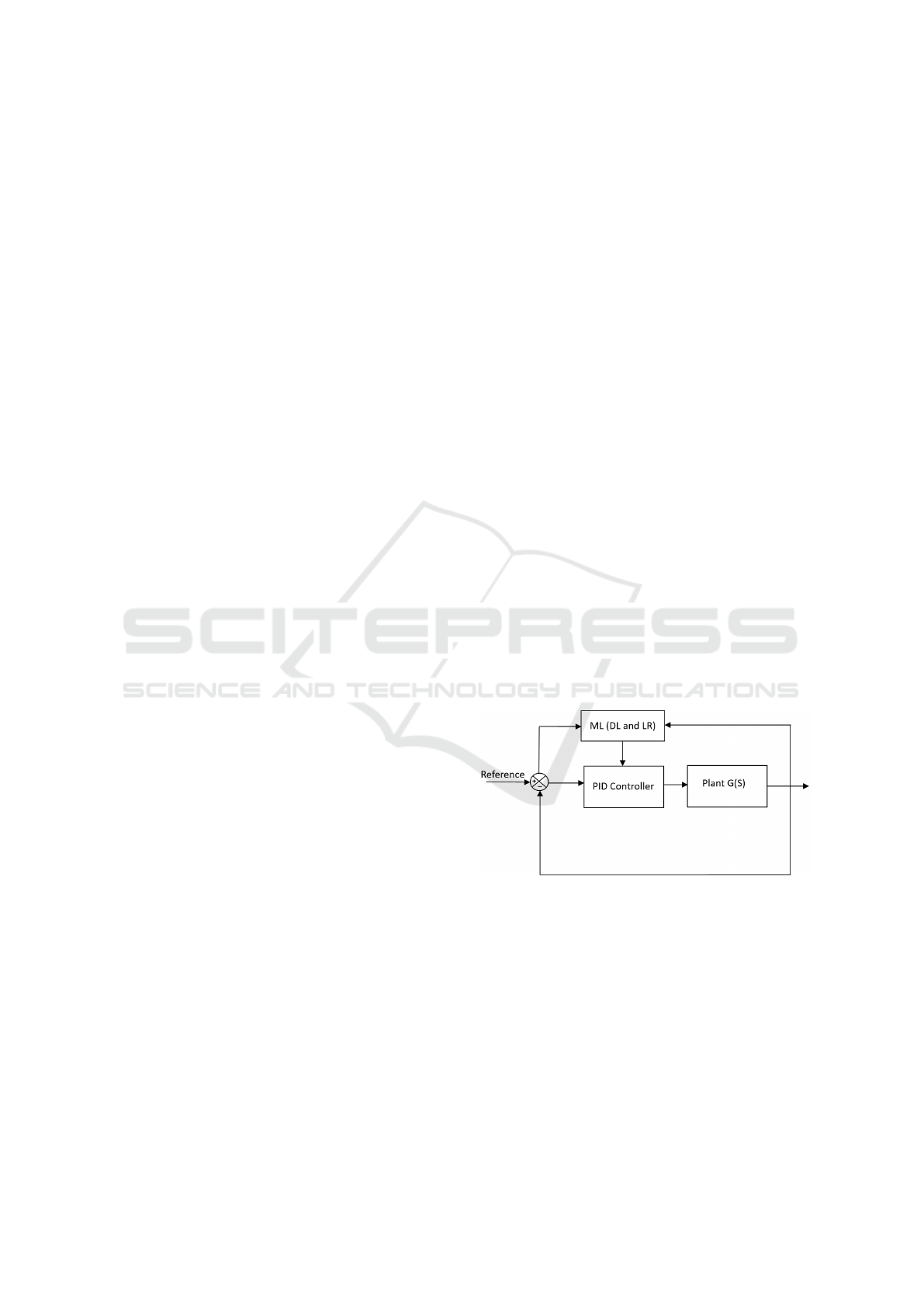
Figure 1: Block diagram for PID parameter estimation us-
ing ML
A PID controller can be used on its own or as
a combination of its three modes. Fig.1 shows the
block diagram of the PID controller. It consists of a
controller that makes decisions and ML block for au-
tonomous tuning via two methods.
2.2 DL for PID Tuning
Use of DL in tuning PID controllers for electrome-
chanical systems is presented in a paper. The model
utilized a neural network trained on system response
Pathare, T. R., Akatar, M., Momin, A. M. A. H., Pathak, R. R., Joshi, L. S. and Chandaragi, P.
Parameter Estimation of PID Controller Using Machine Learning.
DOI: 10.5220/0013617700004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 387-392
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
387

data, enabling real-time parameter optimization and
superior performance in terms of stability and speed
compared to traditional methods. This approach sig-
nificantly reduced overshoot and settling time, mak-
ing it ideal for complex control environments (Saini
et al., 2023).
2.3 Reinforcement Learning for
Autonomous PID Tuning
RL (Reinforcement Learning) has emerged as a dom-
inant tool for adaptive PID tuning. Recent research
explored RL-based approaches where agents learn op-
timal control strategies by interacting with the en-
vironment. For instance, one study utilized model-
based RL to achieve robust PID tuning. The method
effectively handled non-linearity and uncertainties,
demonstrating robust performance under varying con-
ditions (Trujillo et al., 2022).
2.4 Hybrid Approaches Combining ML
and Classical Methods
Several papers propose hybrid approaches that inte-
grate ML with traditional PID tuning techniques. For
example, researchers employed RLS (Recursive Least
Squares) for system identification and ANN (Artifi-
cial Neural Networks) for parameter estimation. This
combination ensured precise tuning and reduced com-
putational overheads (Dogru et al., 2022).
2.5 Application-Specific
Implementations
Industrial Systems: Studies on electromechanical ac-
tuators showed how ML-based tuning could improve
operational efficiency. One example involved tuning
a 3-stage cascaded PID for BLDC (Brush Less Di-
rect Current) motors, which yielded a 90 percent, im-
provement in overshoot and reduced energy consump-
tion.
Process Control: In chemical and thermal process
industries, ML-based PID tuning has been applied to
optimize control loops, resulting in improved energy
efficiency and product quality (Jesawada et al., 2022).
Neural networks are seen to outperform some
other intelligent methods in terms of PID adaptive and
tuning (Lazar et al., 2004), (Iplikci, 2010).
Collection of the accurate data labels can be de-
manding in actual engineering problems (Guan and
Yamamoto, 2020).
ML methods have gained widespread attention
since they are data driven and real-time capable and
the literature has focused on diagnosing PID con-
troller performance issues. Machine Learning clas-
sifiers such as SVM (Suport Vector Machine), deci-
sion trees, and neural networks have been used to de-
tect performance degradation in the absence of de-
tailed system models. Other studies delve into hy-
brid configurations that integrate conventional con-
trol alongside ML to enhance reliability in several
fields, notably in manufacturing, power plants, and
aerospace. Future work entails handling more com-
plex datasets for higher accuracy, developing explain-
able models, and evolving to predictive maintenance
to apply maintenance actions before the problem and
prevent the faults. (Ya
˘
gcı et al., 2024).
This study utilizes the use of neural networks
and reinforcement learning to develop an adaptive
PID controller to control pressure drops in non-linear
fluid systems. The method integrates Hammerstein
identification for system identification and actor-critic
learning to enable real-time PID tuning. This hy-
brid approach improves adaptability and robustness,
achieving better performance than traditional PID
controllers in simulation. This study reveals that a
combination of neural networks and ML can lead
to modern nonlinear environment control solutions,
which is a scalable and is advanced solution for com-
plex industrial fluid systems (Bawazir et al., 2024).
The authors present a generalized and readily tun-
able method to discriminate between acceptable and
poor closed-loop performance. Their approach de-
fines optimal but feasible closed-loop performance
based on intuitive quality factors. A diversified set of
CPI (Control Performance Indices) serve as discrim-
inative features for the offline generated training set.
Thus, the proposed system is intended to be used im-
mediately without further learning (i.e, during regular
operation) (Grelewicz et al., 2023).
The paper explores usage of neural networks for
PID tuning. The challenge discussed is selection of
training sample and suggests replacement of PID con-
trollers with the stated PID tuning method, for better
control (Zhilov, 2022)
DRL (Deep Reinforcement Learning) based PI
gain tuning in robot driver system is proposed, which
utilizes simulation training. D3QN is implemented to
reduce errors and optimize gains. A significant im-
provement is seen in the performance as compared
to older fuzzy logic controllers in testing of vehicles
(Park et al., 2022)
A PID controller is compared to gradient descent
tuning and CNN-based cloning. The study concludes
that PID control displays more accurate and stable re-
sults when tested (Abed et al., 2020)
INCOFT 2025 - International Conference on Futuristic Technology
388

2.6 Challenges and Opportunities
Challenges: ML-based PID tuning requires large
datasets for training, which may not always be fea-
sible. Additionally, deploying ML models in real-
time systems involves computational constraints and
the risk of over-fitting.
Opportunities: Advances in lightweight ML mod-
els and cloud-based computation open avenues for
broader application of these techniques. Future work
could focus on integrating ML-based tuning with IoT-
enabled devices for real-time adaptability.
Conclusion and Future Directions: Machine
learning offers trans-formative potential for PID con-
troller tuning, addressing limitations of manual and
heuristic approaches. As ML models are more robust
and computationally efficient, their integration into
industrial control systems will likely become main-
stream. Future research should explore scalable so-
lutions, ensuring compatibility with diverse industrial
applications and hardware constraints.
3 PROPOSED METHODOLOGY
Methodology for the problem statement proposed in
this research, first, consists generating a dataset of a
total of seven parameters, including both inputs and
outputs; and filtering it. Second, it incorporates train-
ing the model to evaluate the values of k
p
, k
i
, and
k
d
by all the three mentioned tuning techniques, that
is, Ziegler-Nichols, linear regression, and DL; when
steady-stare error, overshoot, rise time and settling
time are given. Then, a comparison is made to find
best of the three mentioned tuning methods.
3.1 Data collection
• To perform parameter tuning, MATLAB gener-
ates a dataset comprising 15,000 values using a
Python code. It consists of two sets of variable
parameters. The input parameters comprise rise
time, steady-state error, maximum overshoot, and
settling-time; while the response parameters for
the PID system are k
d
(derivative component), k
i
(integral gain) and k
p
(proportional gain).
3.2 Data Processing
• It consists of normalizing the input and output
data to train model efficiently. The system re-
sponse characteristics (overshoot, Ess, settling
and rise time) are drawn out by the code as input
characteristics that are stored in variable X. PID
gains (k
p
, k
i
and k
d
) are stored as output targets in
variable Y. Input and output data are normalized
using ”StandardScaler”.
• The obtained normalized data is split into testing
and training sets. 80% of the data is utilized in
training set while the rest 20% in test set.
3.3 Model training
• A Linear Regression model is defined and trained
with ”fit() method”, this minimizes error.
• For DL, a neural network architecture is defined
that will be used for the prediction of PID con-
troller gains. Model compilation is done by an
optimizer, MSE (Mean Squared Error) and MAE
(Mean Absolute Error). The defined DL model is
trained on the training data. The ”fit() method” is
used for training. Model undergoes 100 epochs,
with a batch size of 16.
• Model is composed using MSE. It measures the
average squared difference between the predicted
values and the actual values of a dataset; which is
calculated by the formula given below in equation
(1).
MSE =
1
N
N
∑
i=1
(x
i
− ˆx
i
)
2
(1)
MSE = Mean Squared Error
N = Number of data points
x
i
= observed values
ˆx
i
= predicted values
• MAE is evaluated by equation (2), which gives the
average of absolute value of difference between
the actual and predicted values.
MAE =
∑
N
i=1
|x
i
− y
i
|
N
(2)
MAE = mean absolute error
x
i
= prediction
y
i
= true value
N = total number of data points
3.4 Model Evaluation
• Once trained, model predicts the PID values in
the test set. Model performance is evaluated us-
ing two error metrics namely MSE and MAE. Ac-
curacy calculation is done by the equation given
below (3):
Parameter Estimation of PID Controller Using Machine Learning
389
Accuracy (%) = 100−
MAE
Mean of true values
× 100
(3)
3.5 Visualization
• After obtaining the predicted outcomes, visu-
als are provided for the pre-requisite parameters,
which allows easy elucidation of data. This way
comparison can be made between the three meth-
ods for tuning of PID controller.
4 RESULTS AND ANALYSIS
The model is run by entering values for system pa-
rameters, according to the user requirement to obtain
values of k
p
, k
i
and k
d
. The predicted output is ob-
tained and visual representation of the same is pro-
vided. This way an easy contrast can be made.
The below equation is a closed loop transfer func-
tion (4) :
1 + G
p
(S) ∗ G
c
(S) ∗ H(S) = 0 (4)
The transfer function considered for validation of re-
sults in the proposed research is given below in (5).
1 + (K
p
+
K
i
S
+ K
d
S) ∗
1
(1 + 0.1S)(0.2S + 1)
∗ 1 = 0
(5)
Hence, the characteristic equation obtained is as
given in equation (6):
0.02s
3
+ (0.3 + K
d
)s
2
+ (K
p
+ 1)s + K
i
= 0 (6)
Step input is given as ”1” in Simulink (MATLAB),
for both the samples considered in Table 1.
Table 1: Data for Sample 1 and Sample 2
Sample T
r
T
s
MP % Ess
1 3 5 10 0.05
2 7 5 12 0.052
Table 2: Response for Sample 1
Method K
p
K
i
K
d
ISE
ZN 5.5 0.495 10 0.1195
LR 9.9607 30.9843 11.6628 0.006748
DL 142.2267 318.0241 38.5982 0.004228
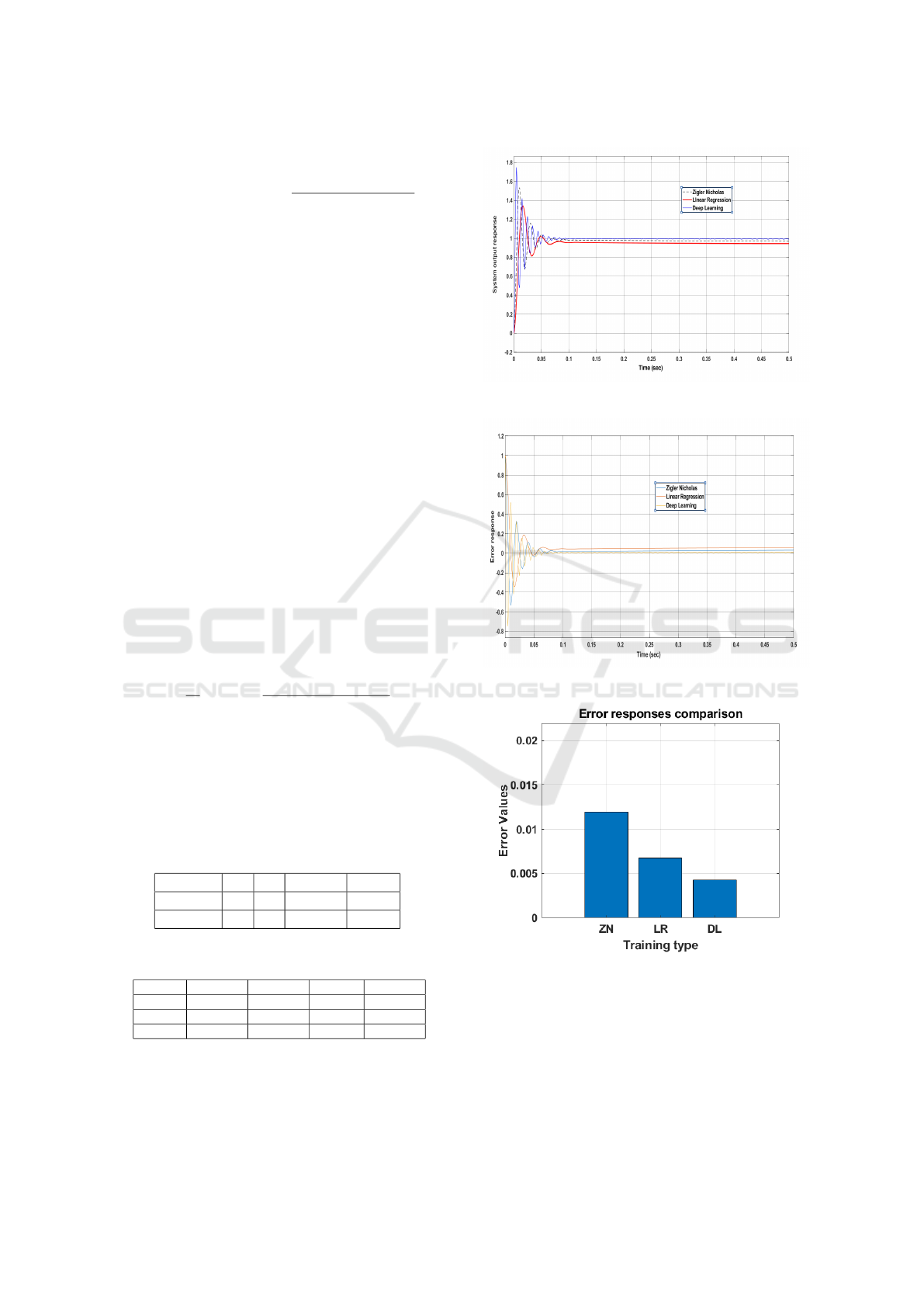
Figure 2: Output Response for Sample 1
Figure 3: Error Response for Sample 1
Figure 4: Error comparison for Sample 1
Considering values of Sample 1 (Table 1), the pre-
dicted output is stated in Table 2. From Fig.2 it can be
observed that out of all the three mentioned methods,
DL method displays the most accurate results. Since
the step input is given as 1, expected output for an ef-
ficient model should be same as the input; this is ob-
served along the output line representing DL (which
INCOFT 2025 - International Conference on Futuristic Technology
390
is closest to 1). The error response of all the three
methods is displayed in Fig 3 which is the least in
DL method. ISE of DL for Sample 1, can be visu-
alized from Fig.4, which is the least when compared
to the other two methods i.e, 0.004228 < 0.1195 and
0.004228 < 0.006748. This results in better perfor-
mance of the system, and an enhanced performance
in terms of precision and stability.
Table 3: Response for Sample 2
Method K
p
K
i
K
d
ISE
ZN 11.4874 0.90581 20 0.03635
LR 6.6725 20.6890 7.6736 0.008989
DL 42.61 67.31 82.45 0.004251
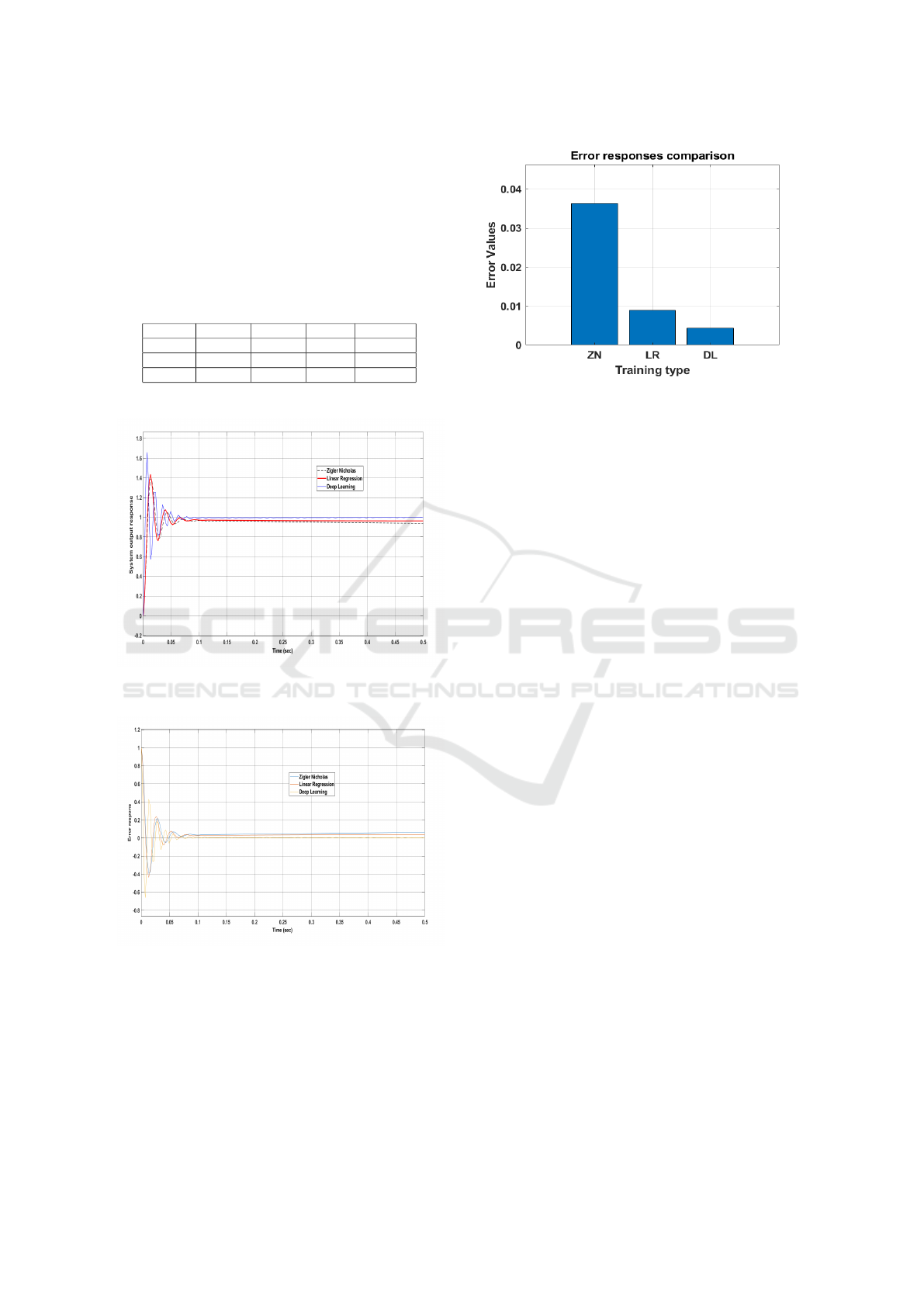
Figure 5: Output Response for Sample 2
Figure 6: Error Response for Sample 2
The above stated conclusions can be supported by
considering Sample 2 (refer Table1). The output re-
sponse is stated in Table 3, visuals of which can be
observed in Fig.5 which depicts that line represent-
ing DL is nearly equal to 1, when compared to the
other two. Error of DL is the least i.e, nearly equal
to 0; which can be visualized from Fig.6 pointing
to the fact that DL is more efficient. The visuals of
Figure 7: Error comparison for Sample 2
ISE are provided in the form of a bar graph in Fig.7,
which depicts that ISE is the least in DL method i.e,
0.004251 < 0.008989 and 0.004251 < 0.03635.
5 CONCLUSION
In this paper we propose an advanced PID parameter
tuning method which minimizes error, and provides
accurate and stable output response for a system.
It can hence be concluded that DL is seen as a
better approach for PID parameter tuning; for the rea-
son that it can be used for modeling complex mod-
els while linear regression and Ziegler-Nichols can
only be used for the training of simpler models. This
clearly shows that this method is more efficient, faster
and convenient than Ziegler-Nichols and linear re-
gression method.
ACKNOWLEDGEMENTS
We would like to acknowledge the Department of
Electrical and Electronics Engineering of KLE Tech-
nological University for all the resources.
REFERENCES
Abed, M. E., Aly, M., Ammar, H. H., and Shalaby,
R. (2020). Steering control for autonomous vehi-
cles using pid control with gradient descent tuning
and behavioral cloning. 2020 2nd Novel Intelligent
and Leading Emerging Sciences Conference (NILES),
pages 583–587.
Bawazir, A. F., AL-Yazidi, N. M., Al-Dogail, A. S., Bin Ga-
ufan, K. S., and Saif, A.-W. A. (2024). Adap-
tive pid controller using neural network for pressure
drop in nonlinear fluid systems. 2024 21st Interna-
Parameter Estimation of PID Controller Using Machine Learning
391

tional Multi-Conference on Systems, Signals & De-
vices (SSD), pages 272–277.
Dogru, O., Velswamy, K., Ibrahim, F., Wu, Y., Sun-
daramoorthy, A. S., Huang, B., Xu, S., Nixon, M., and
Bell, N. (2022). Reinforcement learning approach to
autonomous pid tuning. 2022 American Control Con-
ference (ACC), pages 2691–2696.
Grelewicz, P., Khuat, T. T., Czeczot, J., Nowak, P., Klopot,
T., and Gabrys, B. (2023). Application of machine
learning to performance assessment for a class of pid-
based control systems. IEEE Transactions on Systems,
Man, and Cybernetics: Systems, 53(7):4226–4238.
Guan, Z. and Yamamoto, T. (2020). Design of a reinforce-
ment learning pid controller. 2020 International Joint
Conference on Neural Networks (IJCNN), pages 1–6.
Iplikci, S. (2010). A comparative study on a novel model-
based pid tuning and control mechanism for nonlinear
systems. International Journal of Robust and Nonlin-
ear Control, 20(13):1483–1501.
Jesawada, H., Yerudkar, A., Del Vecchio, C., and Singh,
N. (2022). A model-based reinforcement learning ap-
proach for robust pid tuning. 2022 IEEE 61st Con-
ference on Decision and Control (CDC), pages 1466–
1471.
Lazar, C., Carari, S., Vrabie, D. L., and Kloetzer, M. (2004).
Neuro-predictive control based self-tuning of pid con-
trollers. ESANN, pages 391–395.
Park, J., Kim, H., Hwang, K., and Lim, S. (2022). Deep
reinforcement learning based dynamic proportional-
integral (pi) gain auto-tuning method for a robot driver
system. IEEE Access, 10:31043–31057.
Rahmat, B., Waluyo, M., Rachmanto, T. A., Agussalim,
Pratama, A. R., Muljono, M., Diyasa, I. G. S. M.,
Swari, M. H. P., and Hendrasarie, N. (2023). itclab
pid control tuning using deep learning. 2023 IEEE 9th
Information Technology International Seminar (ITIS),
pages 1–4.
Saini, S., Hernandez, J., and Nayak, S. (2023). Auto-tuning
pid controller on electromechanical actuators using
machine learning. –, pages 1–8.
Trujillo, K. B.,
´
Alvarez, J. G., and Cort
´
es, E. (2022). Pi and
pid controller tuning with deep reinforcement learn-
ing. 2022 IEEE International Conference on Automa-
tion/XXV Congress of the Chilean Association of Au-
tomatic Control (ICA-ACCA), pages 1–6.
Ya
˘
gcı, M., Forsman, K., and B
¨
oling, J. M. (2024). A ma-
chine learning classifier for detection of performance
issues in industrial closed-loop pid controllers. 2024
10th International Conference on Control, Decision
and Information Technologies (CoDIT), pages 1231–
1236.
Zhilov, R. (2022). Application of the neural network ap-
proach when tuning the pid controller. 2022 Interna-
tional Russian Automation Conference (RusAutoCon),
pages 228–233.
INCOFT 2025 - International Conference on Futuristic Technology
392
