Realization of Advanced Driver Assistance System Using FPGA for
Transportation Applications
Ganesh Racha, Yedukondalu Kamatham, Srinivasa Rao Perumalla, Battuwar Akhila,
Adarsh Gangula and Amrith Patalay
Department of Electronics & Communication Engineering, CVR College of Engineering, Hyderabad, India
Keywords: ADAS, Vehicle Transportation, FPGA, Road Safety, Human Security, Accidents, HDL.
Abstract: Transportation is the basic mode of commuting and transporting goods from one place to another place. There
are distinct modes of transportation that are available through air, water, road, etc. Road-based transportation
is the most used mode for many human beings. The increased usage of road transportation is causing accidents
which is a major significant global concern. Hence, there is a requirement for Advanced Driver Assistance
Systems (ADAS) to reduce the number of road accidents. ADAS has been introduced to reduce human errors,
which are one of the leading causes of accidents, such as distracted driving, fatigue, or poor judgment. This
work deals with the design of an ADAS controller using Verilog HDL and AMD Xilinx FPGA EDA tools.
The proposed design uses an algorithm for determining lane departure, adaptive cruise control, blind spot
detection, parking assistance, driver monitoring, collision detection, etc. This algorithm is tested and
simulated for different test cases for measuring safety and security of passengers.
1 INTRODUCTION
Land transportation is the most used mode of
transportation and used to commute from one place to
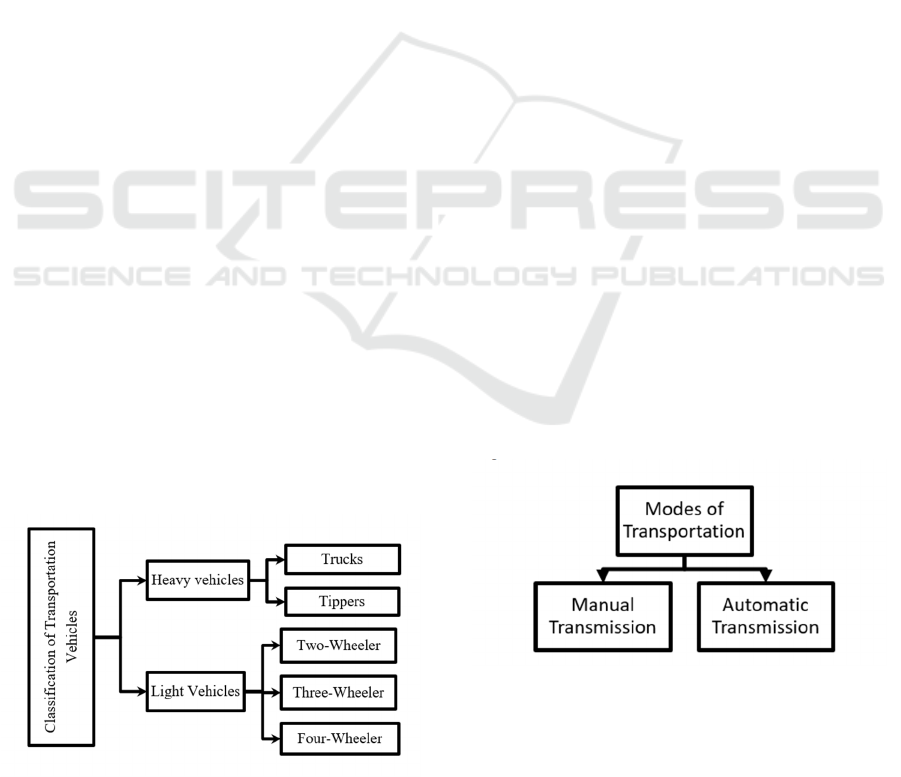
another. Land transportation is very vast, it is divided
into two types, i.e. Heavy vehicles and Light
Vehicles as shown in Figure 1. Heavy vehicles are
used to commute or transport over longer distances,
they are heavier, with an all-terrain build quality.
Figure 1: Classification of Transportation Vehicles
The heavy vehicles comprise Trucks, Tippers, etc,
that can transport many people or commodities and
are usually used for long-distance routes. Light
vehicles are generally used for urban commuting and
transportation. They are used to carry and transport
light commodities. Light vehicles comprise two,
three, and four-wheelers. Vehicles have two
transmission modes, one as manual mode, and the
other is automatic mode of transmission as shown in
Figure 2.
Figure 2: Modes of Transportation
In the manual mode of transmission, the gearbox
and clutch must be engaged manually for vehicle
movement, whereas in the automatic transmission
mode, the clutch is engaged automatically, and the
Racha, G., Kamatham, Y., Perumalla, S. R., Akhila, B., Gangula, A. and Patalay, A.
Realization of Advanced Driver Assistance System Using FPGA for Transportation Applications.
DOI: 10.5220/0013614400004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 301-309
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
301
vehicle adjusts the gear according to the requirement
of the user. This type of automatic advanced driving
mechanism is used to make driving comfortable and
smoother. Advanced Driver Assistance Systems
(ADAS) are a group of technologies that are installed
in cars to make driving safer and more convenient.
Using a variety of sensors, cameras, radar, and other
technologies, these systems keep an eye on the
surroundings of the car, warn the driver of any
dangers, and in some cases, step in to stop collisions.
The following are the main objectives of ADAS:
Improving safety by lowering the likelihood of
crashes, particularly those initiated by human
mistakes. With difficult activities like parking,
changing lanes, and keeping a safe following
distance, drivers can get help from ADAS. By
automating processes like lane centering and speed
adjustments, driving becomes more comfortable
overall. Semi-autonomous and fully autonomous
vehicles are built on the foundation of ADAS. The
degree of intervention is typically used to categorize
each ADAS element, ranging from Level 0 (no
automation) to Level 5 (complete automation) as
shown in Table I.
Table 1: Levels of Transportation Vehicles
S. No Level Automation
1 0 Manual Mode (No Automation)
2 1 Human Assistance
3 2 Partial Automation
4 3 Tentative Automation
5 4 Constrained Automation
6 5 Complete Automation
Level 0 completely works in manual mode. Level
1 provides a feature for the driver to monitor the
vehicle. Level 2 automates vehicle monitoring,
steering, and acceleration with the help of ADAS.
Level 3 uses ADAS with environmental capabilities
using human intervention. Level 4 uses Level 3
features with certain specific conditions. Level 5
works with full automation. This work deals with the
design of Level 2-based ADAS design using AMD
Xilinx FPGA with Verilog HDL. The rest of the paper
is organized as follows: The literature review of
vehicles is given in section II. Section III gives the
design specifications and analysis of the ADAS Level
2 system. Section IV gives the design synthesis and
simulation test case analysis for the ADAS system.
The conclusions drawn are presented in Section V.
2 LITERATURE REVIEW OF
VEHICLES
Adaptive Cruise Control (ACC) is an advanced
feature that controls speed and distance adjustments
between vehicles. Using sensors, it detects the
vehicles ahead and maintains a safe following
distance without driver intervention. This reduces
stress during long drives and helps for smoother
traffic flow, particularly on highways. Some systems
include stop-and-go functionality for city traffic.
Even with its benefits, ACC faces challenges like
sensor accuracy, ensuring that drivers remain
attentive while driving, and addressing any legal
concerns. These issues must be resolved for ACC to
achieve widespread adoption and improve road safety
(Vahidi, Eskandarian, et al. , 2003). Lane Centering
Assistance (LCA) is a driver assistance system
designed to keep vehicles aligned in the center of their
lane. It uses sensors like cameras and radar to monitor
the road markings and the vehicle's position. It adjusts
the steering to the correct position even on curved
roads and at different speeds (Bifulco, Simonelli, et
al. , 2013). LCA enhances safety and reduces driver
workload by maintaining a steady path, mainly while
they are driving on highways. LCA does have issues
which mainly include handling complex road
conditions and ensuring smooth integration with
other driving systems (Tolosana, Ayerbe, et al. ,
2017).
The Advanced Parking Assistance System helps
drivers park safely and easily by using sensors and
automatic controls. It integrates vehicle position data,
planning of path for parking, and Human Machine
Interface (HMI) to guide drivers from the parking lot
entrance to a parking area. The system gives
suggestions on steering and movement commands,
displayed on a screen or by audio. It adjusts for driver
errors and uses a path-planning method that generates
simple, easy-to-follow routes. The main aim of the
system is to reduce stress and improve parking
efficiency, especially for elderly drivers (Wada,
Yoon, et al. , 2003). Blind spot detection helps drivers
identify areas around their vehicles that are hard to
see which can cause accidents. Modern systems use
cameras or sensors to alert drivers visually. Some
advanced systems include physical warnings, like
force-feedback pedals and steering wheel resistance
to actively warn drivers of potential collisions. These
INCOFT 2025 - International Conference on Futuristic Technology
302

systems can detect vehicles in blind spots and give
warnings to guide drivers away from danger. For
example, when a driver tries to change lanes into an
occupied spot, the steering wheel resists turning
(Racine, Cramer, et al. , 2010). Collision avoidance
systems help drivers prevent accidents by warning
about potential dangers or even taking control of the
vehicle if necessary. These systems rely on sensors to
detect accidents and provide alerts, or even apply
brakes or steering by themselves to avoid a crash.
Automated collision avoidance systems can act when
drivers fail to respond to emergencies, ensuring
safety. However, this system is not so advanced yet,
so it sometimes gives false alarms about the hazards
and has problems facing liability issues. There are
more Advanced systems being developed to enhance
accuracy and reliability (Vahidi and Eskandarian,
2003).
The driver's fatigue detection system monitors the
driver’s alertness level using sensors. These sensors
track facial movements, and eye and head position to
determine if the driver shows signs of fatigue. When
the system detects drowsiness or a lack of attention it
generates an alert to warn the driver and apply the
brakes. This system is very useful in preventing
accidents caused by fatigue which ensures safe
driving conditions for long-distance travel (Hossan,
Alamgir, et al. , 2016). Adaptive Cruise Control helps
drivers maintain a safe distance and desired speed on
roads by automatically controlling acceleration and
brakes. However, its performance can vary in heavy
traffic or when vehicles suddenly cut in, often
requiring manual driving by the driver. Even though
ACC helps reduce drivers' efforts by maintaining
speed and a good distance between vehicles, it needs
more improvements in the system for a better
experience for the driver (Marsden, McDonald, et al.
, 2001). An Adaptive Driver Voice Alert System
adjusts voice alerts based on the driver’s emotions to
enhance safety. It uses facial emotion recognition to
detect moods like happiness, anger or fear.
Depending on the detected mood, the system
modifies alerts to ensure they are clear. For example,
during anger, alerts become more detailed to reduce
aggressive driving. This emotionally adaptive
approach helps drivers respond better to alerts,
improving road safety (Sarala, Yadav, et al. , 2018).
This system explores decision-making processes for
Level 0 ADAS in Russian public transport, focusing
on enhancing road safety. Two new systems, Turn
Assist System (TAS) and Lateral Clearance Warning
(LCW), are proposed along with Forward Collision
Warning (FCW), Pedestrian Collision Warning
(PCW), and Blind Spot Monitoring (BSM). Testing
in MATLAB/Simulink confirmed that the systems
meet the requirements and improve safety (Wassouf,
Korekov, et al. , 2023). The buses lag in adopting
autonomous safety systems, but cities like London are
introducing ADAS for buses. On-road trials show that
Forward Collision Warning (FCW) reduces
pedestrian collision risks. Some tests show that
vehicle retarders maintain safe deceleration rates for
emergency stopping, for both sitting and standing
passengers (Blades, Douglas, et al. , 2020).
A driver behavioral analysis system studies
driving patterns to improve advanced driver
assistance systems. It uses data like vehicle speed,
distance, and acceleration to understand driver habits
and reaction delays. By analyzing these behaviors, it
helps create systems that adapt to individual drivers,
improving comfort and safety. The system also
identifies factors like vehicle spacing and reaction
time, which influence driver actions (Chen, Zhao, et
al. , 2018). Future advancements in Advanced Driver
Assistance Systems (ADAS) focus on greater
automation and enhanced safety features. ADAS is
expected to integrate more software-driven
functionalities, contributing to the rise of more
autonomous vehicles. These systems will
increasingly rely on advanced sensors like Light
Detection and Ranging (LiDAR) and cameras along
with AI algorithms, to provide intelligent driving
support. Key trends include improvement in lane
departure warnings, adaptive cruise control, and
driver monitoring. However, challenges like cost
reduction, testing reliability, and user safety concerns
need to be addressed. ADAS will continue to evolve,
becoming integral to safer and smarter transportation
(Kaur and Sobti, 2017). Drowsiness detection using
facial landmarks helps identify if a driver is sleepy by
analyzing their face. This system monitors eye
movements, blinks, and yawns using a feature known
as Eye Aspect Ratio (EAR), which tracks eye closure
duration to determine drowsiness. If the EAR stays
below a threshold for a few seconds, an alarm is
triggered to alert the driver. Preliminary tests showed
87% accuracy, making it a promising tool for
reducing accidents caused by driver fatigue (Cueva
and Cordero, 2020).
AI-based ADAS has been proposed to predict the
dangers that can happen due to road conditions and is
designed to operate on an embedded platform
(Huang, Chen, et al. , 2022). Autonomous vehicles
rely on Advanced Driver Assistance Systems
(ADAS) for driving and parking tasks. The use of
Frequency Modulated Continuous Wave (FMCW)
radar in collision avoidance, particularly for detecting
proximity collisions is a problem for short-range
Realization of Advanced Driver Assistance System Using FPGA for Transportation Applications
303
radars (Ekolle, et al. , 2023). The adoption of
Autonomous Vehicles (AVs) remains limited due to
public mistrust, even though there are many
advancements in the system. This precise
customization of the Support Vector Machine (SVM)
enhances safety and driver support (Hwang, Jung, et
al. , 2022). Facial gestures and emotion recognition
are critical components of Driver Assistance to
enhance road safety. By analyzing eye and lip
movements, the sensors classify emotions into happy,
angry, sad, or surprised (Dragaš, Grbić, et al. , 2021).
The system aims to detect driver inattentiveness or
fatigue and switch the car to automatic mode if
necessary (Agrawal, Giripunje, et al. , 2013). The
system focuses on eye monitoring to detect driver
fatigue and prevent accidents. A front-facing camera
records a video, from which frames are extracted to
detect faces using Histogram of Oriented Gradients
(HOG) and Support Vector Machine (SVM). Facial
landmarks identify eye and mouth positions, allowing
the calculation of Eye Aspect Ratio (EAR) and Mouth
Aspect Ratio (MAR) to estimate fatigue. When
drowsiness is detected, the system alerts the driver
(Kaur, Ponnala, et al. , 2023).
3 DESIGN SPECIFICATIONS
AND ANALYSIS OF ADAS LEVEL 2
SYSTEM
Advanced Driver Assistance Systems (ADAS) are a
group of technologies that are installed in cars to
make driving safer and more convenient. Using a
variety of sensors, cameras, radar, and other
technologies, these systems keep an eye on the
surroundings of the car, warn the driver of any
dangers, and in some cases, step in to stop collisions.
The main objective of ADAS is to improve safety by
lowering the likelihood of crashes, particularly those
initiated by human mistakes. With difficult activities
like parking, changing lanes, and keeping a safe
following distance, drivers can get help from us. By
automating processes like lane centering and speed
adjustments, driving becomes more comfortable.
The Level 2 ADAS refers to systems that provide
"partial automation," which means that under some
circumstances, the car can control both steering and
acceleration/deceleration. However, the driver must
always be actively involved and prepared to take
over. Although level 2 systems are commonly
referred to as "hands-off," this term only applies in a
limited sense because the driver is still required to
keep an eye on the vehicle and surroundings. The
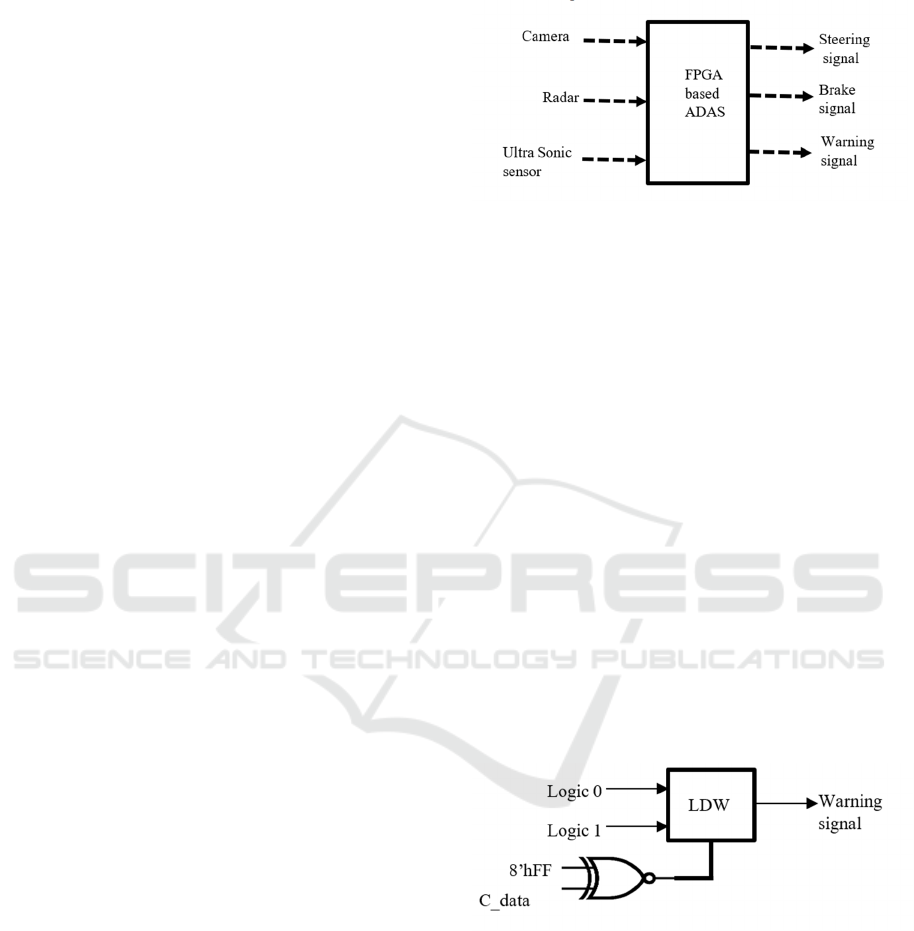
architecture of the FPGA-based ADAS system is
shown in Figure 3.
Figure 3: FPGA-based ADAS system architecture
The FPGA-based ADAS system architecture is
designed by taking the inputs from the camera, radar,
side camera, ultrasonic sensor, and the data of eye
position. This architecture generates the steering
signal, brake signal, and warning signal as outputs.
The ADAS system is designed by using the following
functionalities of Level 2:
1. Lane Departure Warning (LDW)
2. Blind Spot Detection (BSD)
3. Driver Monitoring (DM)
4. Adaptive Cruise Control (ACC)
5. Collision Detection (CD)
6. Parking Assistance (PA)
3.1 Lane Departure Warning (LDW)
The LDW system helps to detect when a vehicle starts
to move out of its lane. The design of LDW is shown
in Figure 4. It processes data from a camera(C_data),
represented as an 8-bit signal (lane_position), to
determine whether the vehicle is still within safe lane
boundaries or not.
Figure 4: Design of Lane Departure Warning (LDW)
3.2 Blind Spot Detection (BSD)
The BSD system is designed to monitor areas around
the vehicle that are difficult for the driver to see,
particularly the blind spots. The design of BSD is
shown in Figure 5. This system uses data from Side
Cameras (SC). When a vehicle is detected in the blind
spot, it activates a warning signal to alert the driver.
INCOFT 2025 - International Conference on Futuristic Technology
304
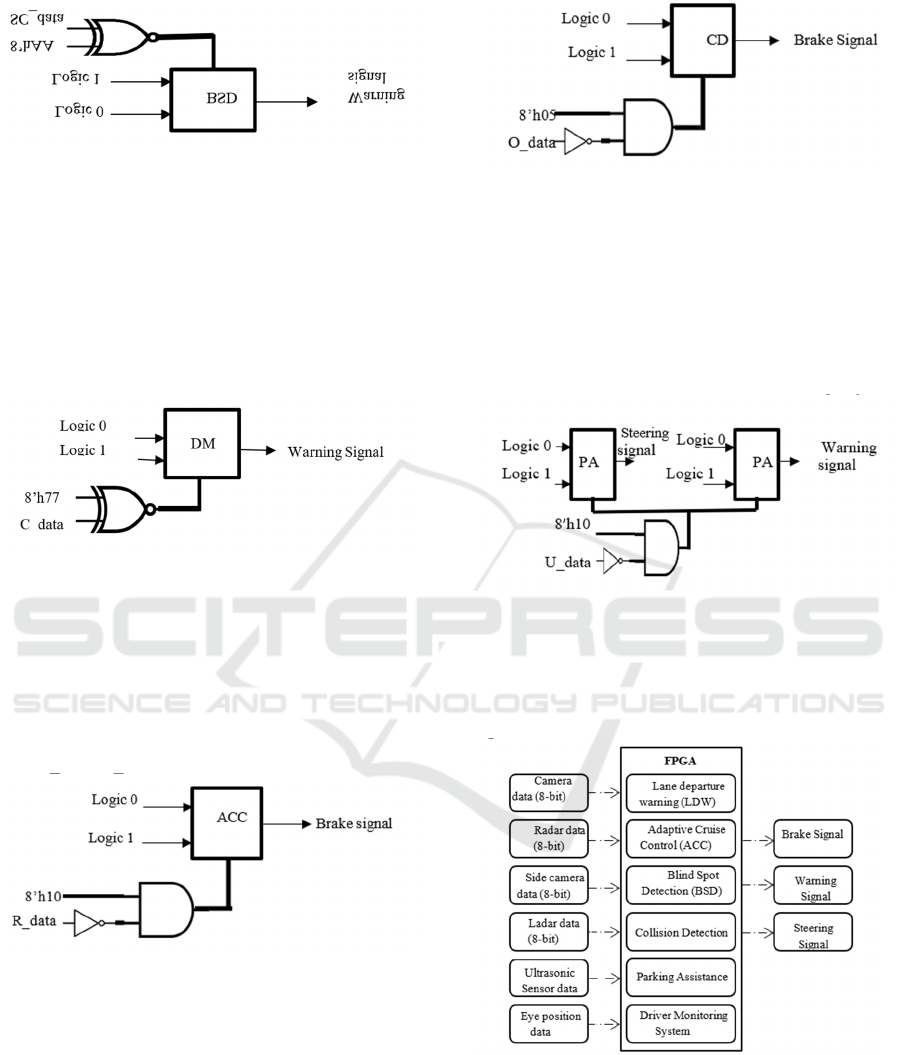
Figure 5: Design of Blind Spot Detection
3.3 Driver Monitoring (DM)
The DM is designed to track the driver's level of
attentiveness and alertness. The design of BSD is
shown in Figure 6. This system uses a camera to
monitor the driver’s eye position(C_data), and if
signs of drowsiness or distraction are detected, it
activates a warning to alert the driver.
Figure 6: Design of Driver Monitoring
3.4 Adaptive Cruise Control (ACC)
The ACC system adjusts the vehicle's speed based on
the distance to the vehicle ahead. The design of ACC
is shown in Figure 7. The system uses input and
distance from a radar sensor that is
Radar_data(R_data).
Figure 7: Design of Adaptive Cruise Control
3.5 Collision Detection (CD)
The CD system is designed to prevent accidents by
monitoring the distance to nearby obstacles and
activating the vehicle's brakes if a collision is going
to happen. It uses input from radar that is obstacle
data(O_data). The design of the CD is shown in
Figure 8.
Figure 8: Design of CD
3.6 Parking Assistance (PA)
The Parking Assistance system is designed to help
drivers park safely by detecting nearby obstacles
during parking. The design of PA is shown in Figure
9. It uses ultrasonic sensors(U_data) to measure the
distance between the vehicle and surrounding objects.
Figure 9: Design of Parking Assistance
The design of FPGA-based ADAS is shown in
Figure 10. This system generates brake, warning, and
steering signals as per the algorithm and the design
inputs.
Figure 10: Design of FPGA-based ADAS
The algorithm used for brake, warning signal, and
steering signals is shown in Figures 11 to 13. The
algorithm which generates a warning signal is shown
in Figure 11. The algorithm that generates the brake
signal is shown in Figure 12. The algorithm that
generates the steering signal is shown in Figure 13.
Realization of Advanced Driver Assistance System Using FPGA for Transportation Applications
305
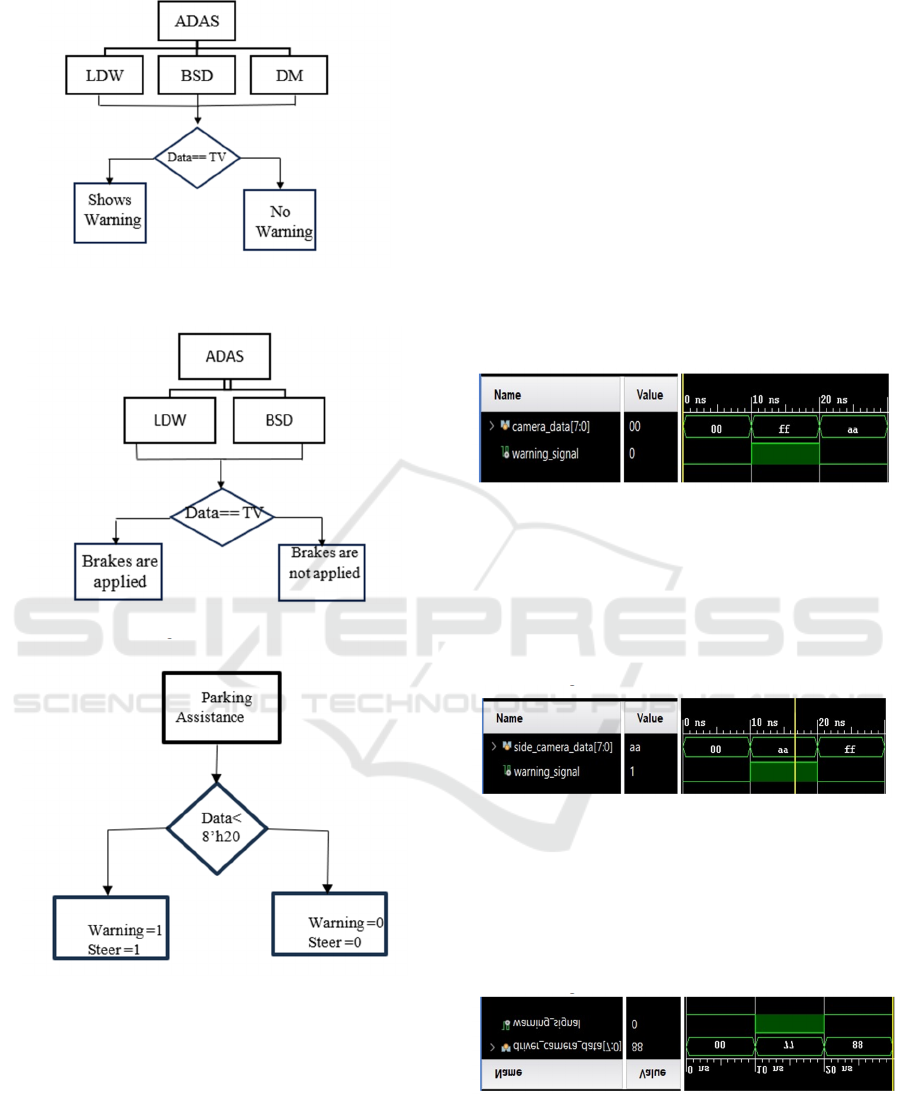
Figure 11: Algorithm for
warning
signal
Figure 12:
Algorithm
for warning signal
Figure 13:
Algorithm
for steer signal
In Figure 11 when the data is equal to the
threshold then a warning signal is shown. In Figure
12 when the data is less than the TV, then the brakes
are applied. In Figure 13 when the data is less than
the threshold, then warning is shown, and steering is
controlled. This data can be camera data, radar data,
side camera data, ultrasonic sensor data, and the data
of eye position based on the functionality of ADAS.
4 DESIGN SIMULATION AND
SYNTHESIS RESULTS OF
ADAS LEVEL 2 SYSTEM
The simulation and synthesis of ADAS done by using
Verilog HDL and FPGA design tools. The
simulations for different test cases and conditions are
shown below.
4.1 Lane Departure Warning (LDW)
Let the TV be 8’hFF. If the camera_data value is less
than or greater than the threshold then the warning
signal is displayed. The simulation is shown in Figure
14.
Figure 14: Simualtion of LDW test case
4.2 Blind Spot Detection (BSD)
Let the threshold be 8’hAA. If the side_camera_data
value is less than or greater than the threshold then
the warning signal is displayed. The simulation is
shown in Figure 15.
Figure 15: Simualtion of BSD test case
4.3 Driver Monitoring (DM)
Let the threshold be 8’h77. If the driver_camera_data
value is less than or greater than the threshold then
the warning signal is displayed. The simulation is
shown in Figure 16.
Figure 16: Simualtion of DM test case
4.4 Adaptive Cruise Control (ACC)
Let the threshold be 8’h10. If the side_camera_data
value is lesser or reater than the threshold then, the
INCOFT 2025 - International Conference on Futuristic Technology
306
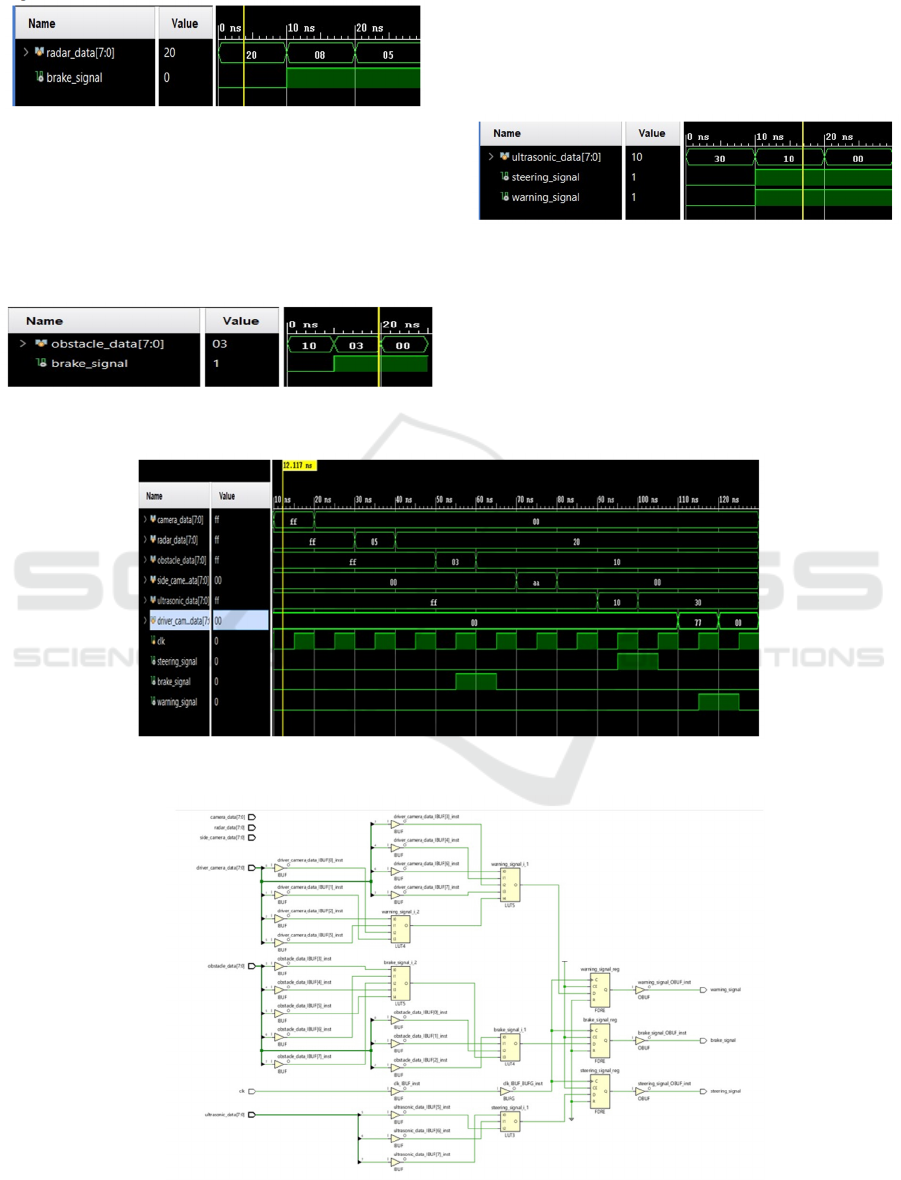
brake signal is displayed. The simulation is shown in
Figure 17.
Figure 17: Simualtion of ACC test case
4.5 Collision Detection (CD)
Let the threshold be 8’h05. If the Obstacle_data value
is less than the threshold then the brake signal is
enabled. The simulation is shown in Figure 18.
Figure 18: Simulation of CD test case
4.6 Parking Assistance (PA)
Let the threshold be 8’h20. If the Ultrasonic_data
value is less than the threshold then the steering and
warning signals are enabled. The simulation is shown
in Figure 19.
Figure 19: Simulation of CD test case
The detailed simulation result for all test cases and
the synthesis design are shown in Figure 20 and
Figure 21.
Figure 20: Simulation of ADAS for all test cases
Figure 21: Synthesis of ADAS for all test cases
Realization of Advanced Driver Assistance System Using FPGA for Transportation Applications
307

5 CONCLUSIONS
Using Artix FPGA technology and a 4-bit encoding
technique, this study presents an energy-efficient
FPGA-based Advanced Driver Assistance Systems
(ADAS) system. For essential ADAS features, the
architecture provides real-time performance. The
system provides an optimal blend of computing
capability and resource efficiency with an
impressively low on-chip power consumption of
0.466 W and efficient utilization of merely 5 Look-
Up Tables (LUTs). For safety-critical automotive
applications, its parallel processing capabilities
guarantee quick and precise decision-making. This
small and expandable solution shows how FPGA
technology can revolutionize vehicle safety, facilitate
integration into energy-efficient automotive
platforms, and open the door for more sustainable and
advanced ADAS solutions.
REFERENCES
A. Vahidi and A. Eskandarian, "Research advances in
intelligent collision avoidance and adaptive cruise
control," in IEEE Transactions on Intelligent
Transportation Systems, vol. 4, no. 3, pp. 143-153,
Sept. 2003, doi: 10.1109/TITS.2003.821292
Gennaro Nicola Bifulco, Luigi Pariota, Fulvio Simonelli,
Roberta Di Pace, Development and testing of a fully
Adaptive Cruise Control system, Transportation
Research Part C: Emerging Technologies, Volume
29,2013, ISSN 0968-
090X,https://doi.org/10.1016/j.trc.2011.07.001.
I. Ballesteros-Tolosana, P. Rodriguez-Ayerbe, S. Olaru, R.
Deborne and G. Pita-Gil, "Lane centering assistance
system design for large speed variation and curved
roads," 2017 IEEE Conference on Control Technology
and Applications (CCTA), Maui, HI, USA, 2017, pp.
267-273, doi: 10.1109/CCTA.2017.8062474.
M. Wada, Kang Sup Yoon, and H. Hashimoto,
"Development of advanced parking assistance system,"
in IEEE Transactions on Industrial Electronics, vol. 50,
no. 1, pp. 4-17, Feb. 2003, doi:
10.1109/TIE.2002.807690.
D. P. Racine, N. B. Cramer, and M. H. Zadeh, "Active blind
spot crash avoidance system: A haptic solution to blind
spot collisions," 2010 IEEE International Symposium
on Haptic Audio Visual Environments and Games,
Phoenix, AZ, USA, 2010, pp. 1-5, doi:
10.1109/HAVE.2010.5623977.
A. Vahidi and A. Eskandarian, "Research advances in
intelligent collision avoidance and adaptive cruise
control," in IEEE Transactions on Intelligent
Transportation Systems, vol. 4, no. 3, pp. 143-153,
Sept. 2003, doi: 10.1109/TITS.2003.821292.
Hossan, Alamgir & Bin Kashem, Faisal & Hasan, Md &
Naher, Sabkiun & Rahman, Md. (2016). A Smart
System for Driver Fatigue Detection, Remote
Notification, and Semi-Automatic Parking of Vehicles
to Prevent Road Accidents.
10.1109/MEDITEC.2016.7835371.
Reg Marsden, Mike McDonald, Mark Brackstone, Towards
an understanding of adaptive cruise control,
Transportation Research Part C: Emerging
Technologies, https://doi.org/10.1016/ S0968-
090X(00)00022-X.
S. M. Sarala, D. H. Sharath Yadav and A. Ansari,
"Emotionally Adaptive Driver Voice Alert System for
Advanced Driver Assistance System (ADAS)
Applications," 2018 International Conference on Smart
Systems and Inventive Technology (ICSSIT),
Tirunelveli, India, 2018, pp. 509-512, doi:
10.1109/ICSSIT.2018.8748541.
Y. Wassouf, E. M. Korekov, and V. V. Serebrenny,
"Decision Making for Advanced Driver Assistance
Systems for Public Transport," 2023 5th International
Youth Conference on Radio Electronics, Electrical and
Power Engineering (REEPE), Moscow, Russian
Federation, 2023, pp. 1-6, doi: 10.1109/
REEPE57272.2023.10086753.
Blades, L., Douglas, R., Early, J., Lo, C.Y. and Best, R.,
2020. Advanced driver-assistance systems for city bus
applications (No. 2020-01-1208). SAE Technical
Paper.
H. Chen, F. Zhao, K. Huang, and Y. Tian, "Driver Behavior
Analysis for Advanced Driver Assistance System,"
2018 IEEE 7th Data Driven Control and Learning
Systems Conference (DDCLS), Enshi, China, 2018, pp.
492-497, doi: 10.1109 /DDCLS.2018.8516059.
.P. Kaur and R. Sobti, "Current challenges in modeling
advanced driver assistance systems: Future trends and
advancements," 2017 2nd IEEE International
Conference on Intelligent Transportation Engineering
(ICITE), Singapore, 2017, pp. 236-240, doi:
10.1109/ICITE.2017.8056916.
L. D. S. Cueva and J. Cordero, "Advanced Driver
Assistance System for the drowsiness detection using
facial landmarks," 2020 15th Iberian Conference on
Information Systems and Technologies (CISTI),
Seville, Spain, 2020, pp. 1-4, doi: 10.23919/
CISTI49556.2020.9140893.
X. -H. Huang, Z. -H. Chen, A. Ahamad and C. -C. Sun,
"ADAS E-Bike: Auxiliary ADAS Module For Electric
Power-assisted Bicycle," 2022 IET International
Conference on Engineering Technologies and
Applications (IET-ICETA), Changhua, Taiwan, 2022,
pp. 1-2, doi: 10.1109/IET-
ICETA56553.2022.9971513.
Z. E. Ekolle et al., "A Reliable 79GHz Band Ultra-Short
Range Radar for ADAS/AD Vehicles Using FMCW
Technology," 2023 IEEE International Automated
Vehicle Validation Conference (IAVVC), Austin, TX,
USA, 2023, pp. 1-6, doi:
10.1109/IAVVC57316.2023.10328083.
INCOFT 2025 - International Conference on Futuristic Technology
308

G. Hwang, D. Jung, Y. Goh and J. -M. Chung, "Personal
Driving Style-based ADAS Customization in Diverse
Traffic Environments using SVM for Public Driving
Safety," 2022 13th International Conference on
Information and Communication Technology
Convergence (ICTC), Jeju Island, Korea, Republic of,
2022, pp. 1938-1940, doi:
10.1109/ICTC55196.2022.9952997.
S. Dragaš, R. Grbić, M. Brisinello and K. Lazić,
"Development and Implementation of Lane Departure
Warning System on ADAS Alpha Board," 2021
International Symposium ELMAR, Zadar, Croatia,
2021, pp. 53-58, doi:
10.1109/ELMAR52657.2021.9550915.
U. Agrawal, S. Giripunje and P. Bajaj, "Emotion and
Gesture Recognition with Soft Computing Tool for
Drivers Assistance System in Human Centered
Transportation," 2013 IEEE International Conference
on Systems, Man, and Cybernetics, Manchester, UK,
2013, pp. 4612-4616, doi: 10.1109/SMC.2013.785.
J. Kaur and R. Ponnala, "Driver’s Drowsiness Detection
System Using Machine Learning," 2023 International
Conference on Advances in Computation,
Communication and Information Technology
(ICAICCIT), Faridabad, India, 2023, pp. 339-343, doi:
10.1109/ICAICCIT60255.2023. 10465952.
Realization of Advanced Driver Assistance System Using FPGA for Transportation Applications
309
