
An EMG Based Expert System for Detection of Wrist Flexion and
Extension
Madhuri Thorat
1,2
, Rohit Mehta
1,2
, Manav Nayyar
1,2
, Rishikesh Oza
1,2
and Rutuja Mane
1,2
1
AISSMS Institute of Information Technology, Shivajinagar, Pune, India
2
Department of Artificial Intelligence and Data Science, SPPU Pune University, India
Keywords: Electromyography, Prosthetic Wrist, Wrist Flexion, Wrist Extension.
Abstract: This paper presents an electromyography (EMG) based system for classification and detection of wrist
movement by carrying four different sets of movements. The experiment involved eight healthy subjects. The
subjects were asked to put their hands in a horizontal plane. The subject then flexed their wrist from middle
position to maximum flexion position and extended wrist to maximum extension position. The activities were
performed in pronated as well as in supinated form. Notch filters and Band-pass filters were used in order to
eliminate noise and preserve the features. The low and high cut-off frequency for notch and band-pass filter
were 10Hz-80Hz with a sample rate of 512Hz.
1 INTRODUCTION
Electromyography is a biological signal representing
neuromuscular activities (Zhang, Zhang, et al. , 2020)
by measuring electrical currents generated in muscles
during contraction. The neurological system always
controls muscle contraction and relaxation.
Electromyography (EMG) signals can help
clinical/biomedical applications, Evolvable
Hardware Chip (EHW) development, and current
human-computer interfaces. In terms of
operationality, a wristwatch (Matsumura, Yuji, et al.
, 2005) is now the preferred option. As a result,
investigation showed Electromyogram (EMG), is a
signal created by a live body in response to
movement. Various studies use surface
electromyography (Khokhar, Zeeshan, et al. , 2010)
to classify hand movements. Wearable surface
electromyography (EMG) devices can help people
with sarcopenia and reduced muscle mass.
2 LITERATURE SURVEY
Five channel surface EMG signals (Zhang et al.,
2020) were obtained using the following muscles: i.)
Flexor carpi ulnaris, ii.) Flexor carpi radialis, iii.)
Extensor carpi radialis longus, iv.) Extensor carpi
ulnaris and v.) Extensor digitorum. Five people
participated in dataset collection. The research
explored pattern recognition for myo-control
prosthesis by employing feature extraction
techniques like Mean absolute value (MAV), Root
mean square (RMS), and Variance (var). Independent
Component Analysis (ICA) was used as pre-
processing technique (Parajuli, Sreenivasan, et al. ,
2019) and Common spatial pattern (CSP) was
employed as dimensionality reduction. EMG
challenges and prospective solutions were also
included in the research. The pilot study included a
30-year man. Four superficial forearm muscles were
used to record EMG signals using bipolar electrodes.
EMG data was processed with cut-off frequency
(Parajuli, Nawadita, et al. , 2019) of 6Hz-40Hz (low
and high frequency) using 4
th
order butter-worth zero-
phase filter. EMG signals were used to drive a
prosthetic hand. The patient's forearm can be used to
replace the prosthetic hand. Five servomotors power
the prosthetic hand (Selvan, Paul, et al. , 2021) and
the system had taken visual and gesture controls. Four
people were taken as subjects for dataset collection.
A method was used to discriminate between EMG
signals of wrist and fingers (Qichuan, Ding, et al. ,
2014) using single surface electrode. Raw EMG
signals were digitised using the PCI1716, while
Myoscan amplified them at 1kHz. SEMG signals
were measured with three surface electrodes (Liu, Jie,
278
Thorat, M., Mehta, R., Nayyar, M., Oza, R. and Mane, R.
An EMG Based Expert System for Detection of Wrist Flexion and Extension.
DOI: 10.5220/0013614100004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 278-285
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
et al. , 2019) using Extensor digitorum, Flexor carpi
radialis, and Biceps brachii. Noise in raw data having
50/60 Hz notch filters was minimised in power lines.
Band-pass filters with frequencies between 10/20Hz
and 500Hz were routinely applied to EMG signals
(Li, Guanglin, et al., 2019) in addition to notch filters.
Ten volunteers provided the data. Five SEMG
recordings were made for each subject using Ag-
AgCl electrodes (Cañón, Olaya, et al. , 2017) placed
on the forearm. Three men and three women, with
unilateral trans-radial amputations participated in the
experiment. All subjects had seven pairs of Ag-AgCL
electrodes implanted in their forearms. The complete
forearm's thickest portion was surrounded by
electrode pairs (Cañón, David, et al. , 2017). Various
muscles (Ziai, Amirreza, et al. , 2011) were evaluated
in the experiment in order to capture EMG signals.
Six transforearm amputees without neurological
illness participated in the tests. EMG data from four
muscles of both arms were sampled at 500Hz (Kim,
Sehyeon, et al. , 2022) to determine wrist and hand
movements. Two subjects participated in the dataset
collection. Electromyogram (EMG) data was used to
predict three shoulder movements (horizontal flexion
extension, internal and external rotation), elbow
flexion-extension (Kirsch, and, Hincapie., 2003) and
forearm pronation/supination. The Time-delayed
artificial neural network (TDANN) was used to
forecast these motions. For EMG-based interfaces,
wrist and hand movements were predicted using a
musculoskeletal model (MM) and linear regression
(LR). Wrist flexion/extension and
metacarpophalangeal was performed by six people
and one trans-radial amputee patient. The model’s
performance was assessed using Pearson's correlation
coefficient (r) (Pan, Lizhi, et al. , 2019) and feature
extraction made use of normalised root mean square
error (NRMSE). Extensor digitorum, Flexor
Digitorum, Extensor Carpi Radialis Longus, and
Flexor Carpi Radialis were used to record surface
EMG signals. Using a 4th-order butter-worth high
pass filter, EMG signals were filtered at 40 Hz,
rectified, and then filtered once more at 6 Hz. EMG
patterns are distinguished by the log-linearized
Gaussian mixture network (LLGMN), (Fukuda,
Osamu, et al. , 2003) a statistical neural network. New
technology was tested on eight participants, including
two amputees. Triceps Brachii, Flexor Carpi Ulnaris,
Brachioradialis and Triceps Brachii were consulted.
Feature extraction using quadratic polynomials was
proposed (Kurisu, Naoyuki, et al. , 2009) to improve
the accuracy of conic models. The experimental setup
was performed on five subjects. Each participant
repeated the motion five times to get a learning
parameter for quadratic polynomials. A 3D hand
model was used to test these strategies. A Genetic
algorithm (GA) was used for classifying hand
movements using electromyography (EMG) signals.
The Wavelet Transform (WT) was utilised to extract
data signal features and the qualities were given in a
hybrid intelligent system (HIS) made of artificial
neural networks (ANNs) and GA. The categorization
findings were promising, with 90% accuracy and
98% reliability. For dataset collection (Lima,
Martins, et al. , 2018) ten volunteers were taken as
subjects. Using the Nyquist theorem, noise was cut
down by using band-pass filtering (Kilic, Ergin., et al.
, 2017) on digital signals that had been sampled at 1
kHz. The investigation's data segmentation took
128ms. A number of feature extraction methods and
time-delayed artificial neural networks (TDANN)
were used to train and test raw EMG input signals. A
hybrid EMG-to-motion model was built using a latent
Dirichlet allocation model (LDA). With the help of a
Feed forward neural network (FNN) model,
researchers were able to calculate the continuous joint
movement (Kawano, Takuhei, et al. , 2016) and the
model recognised tiny joint motion modes. A context-
based task model was created to improve the hybrid
model's estimation.
3 METHODOLOGY
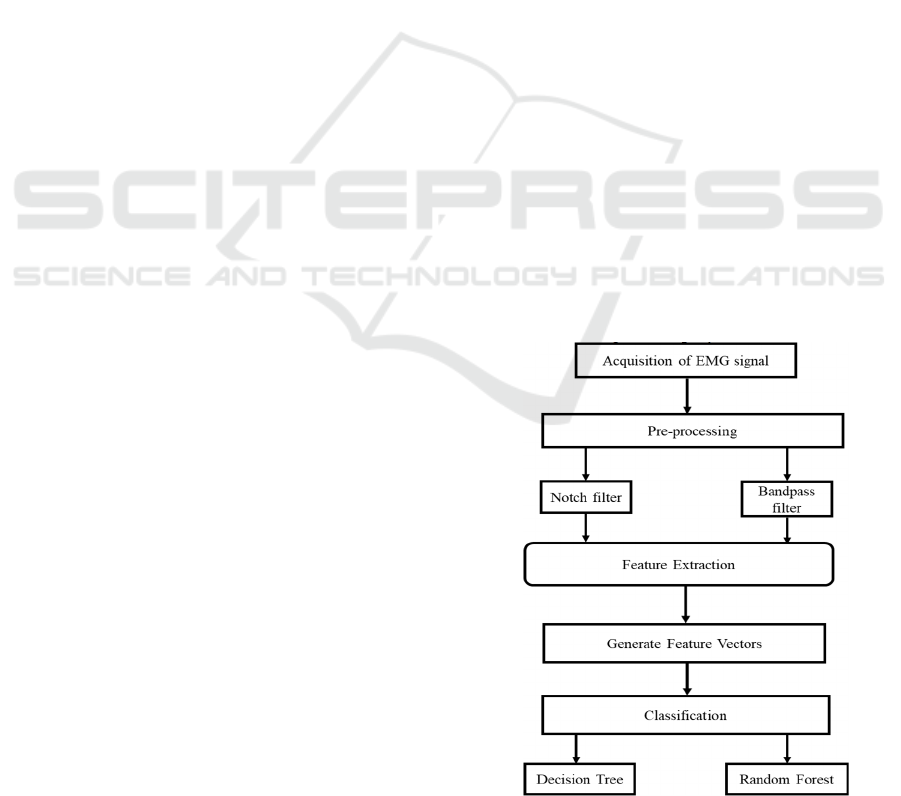
The proposed system is built to control prosthetic
wrist using EMG signal. Figure.1. demonstrates the
System block diagram employed in this research.
Figure 1: System Block Diagram
An EMG Based Expert System for Detection of Wrist Flexion and Extension
279

3.1 Dataset and Pre-Processing
Surface EMG signals were recorded with
512sampling. All subjects participating in the signal
acquisition were given instructions to familiarize
themselves with the technique. The experiment
included eight healthy subjects. The activities
included in the experiment for dataset acquisition
included wrist Flexion and Extension. The subjects
were asked to put their hands in a horizontal plane in
order to flex their wrist from middle position to
maximum flexion position and extend their wrist to
maximum extension position. The activities were
performed in pronated as well as in supinated form.
Figure.2. demonstrates the activities performed for
dataset collection. The EMG signal was recorded
using four channel electrodes. The muscles employed
to record EMG signals were: (i)Flexor carpi radialis,
(ii)Flexor carpi ulnaris, (iii)Extensor carpi radialis
longus, and (iv)Extensor carpi radialis longus. Fig.3.
demonstrates the montage used for the electrode
placement during dataset collection. Channel 1
electrode was positioned at Flexor Carpi Radialis,
Channel 2 electrode was positioned at Flexor Carpi
Ulnaris, Channel 3 electrode was positioned at
Extensor Carpi Radialis Longus, and Channel 4
electrode was positioned at Extensor Carpi Ulnaris.
Each activity performed for Dataset collection lasted
between 3-4 seconds. Each activity was performed
multiple times and the signals were recorded. The
EMG signal data for all the subjects were converted
into CSV files. CSV file consists of 5 columns where
first column indicates index and remaining columns
represents the channels used for data acquisition.
Figure 2: Activities performed for Dataset collection
Figure 3: Montage used for electrode placement
Each CSV file contains 5 columns and 6000-8000
rows. The dataset was further split into two groups:
Training and testing. For Training purpose data of 6
subjects was used and remaining data of 2 subjects
was used for testing.
The approach employed for filtering techniques
are the notch filter and the band pass filter (BP).
Band-stop filters, such as notch filters, only affect
frequencies within a specific range and leave the rest
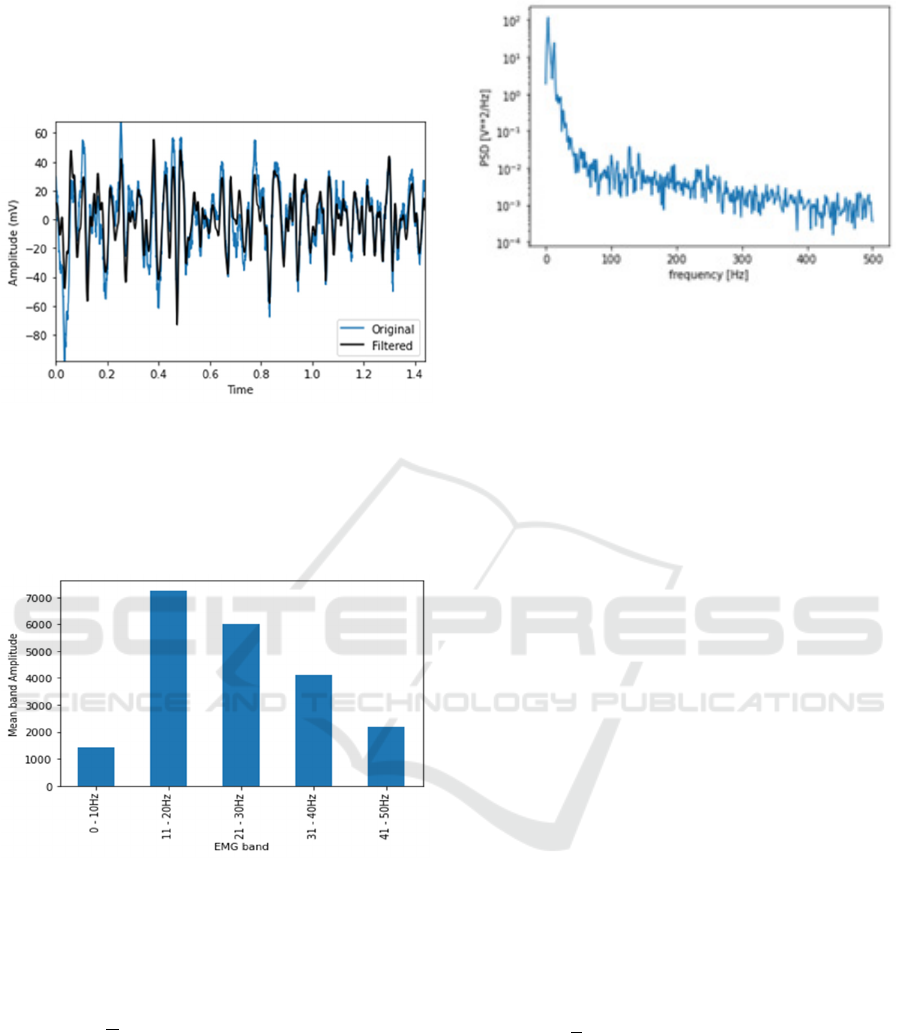
untouched. Figure.4. demonstrates the graph plotted
for notch filter for band reject frequency range as
49Hz to 50Hz to remove supply frequency artifacts.
The plot shows original waveform vs filtered
waveform. Wrist action presented in the graph is for
Normal extension. Band-pass filter permits signals
within a specified frequency range to be received or
decoded, while inhibiting the collection of signals at
other frequencies.
Figure 4: Waveform of Notch Filter output
Figure 5: Mean band Amplitude of notch filter output
INCOFT 2025 - International Conference on Futuristic Technology
280
The bandpass filter of lower cutoff frequency
10Hz and higher cutoff frequency 80Hz is used to
remove the remaining frequencies. The following
plot shows original waveform vs filtered waveform.
Figure 6: Graph for Band-pass Filter
Filtered signals in Figure.6. show that the
frequency in the range of 10Hz to 80Hz are retained
and the rest are removed. Figure.7. shows the Mean
band amplitude of the filtered signal.
Figure 7: Mean band amplitude for bandpass filter
PSD (Power Spectral density for filtered signal
can be calculated with given equation:
𝑆
𝑓
𝑥
𝑛
∗𝑒
2
1
(1)
𝑃
𝑆𝑘
2
1
(2)
Following signal shows the PSD of filtered output
signal:
Figure 8: PSD of filtered signal
It can be observed that majority portion of signal
power is distributed at lower range of frequency.
3.2 Feature Extraction
Classification relies on a variety of digital-signal
processing methods. Pre-processing the signals,
removing noise, and obtaining clearer information are
some of the benefits of these procedures. Fast Fourier
transform and Wavelet Transform are examples of
some of the techniques. In contrast to the other
methods, the Wavelet transform retrieves data in
time-frequency domains whereas other techniques
extract information only in frequency domain. The
signals were put through a Discrete Wavelet
Transform (DWT) dB2 with the decomposition of 3
level. Energy, entropy, and standard deviation of the
wavelet coefficients was calculated to describe the
feature. Each wave segment was analysed to calculate
time domain features and variation over the time in
terms amplitude and frequency. Various time domain
properties are described in the following equations
given below. The average corrected value (ACV) is
the same as the mean absolute value (MAV). MAV
helps in detecting and gauging muscle contraction
levels. MAV is represented in Eq. 3. In Eq. 3,4,5,6,7,
and 8. 𝑥
represents the EMG signal and N represents
length of the signal.
𝑀𝐴𝑉
∑|
𝑥
|
(3)
The time-domain feature extractor variance is
used to extract the information of the power of EMG.
The variance is typically equal to the mean of the
square of the variable's deviation. The mean of the
EMG signal, on the other hand, is near to zero. VAR
is represented in Eq.4.
An EMG Based Expert System for Detection of Wrist Flexion and Extension
281
𝑉𝐴𝑅
𝑥
(4)
The frequency information in the EMG segment
is measured using Willison Amplitude (WAMP). It
keeps track of how frequently the difference between
two successive amplitudes exceeds a set threshold. It
is equivalent to Slope Sign change (SSC)and Zero
crossing (ZC), which are used to reduce noise effects.
WAMP is represented in Eq. 5
𝑊𝐴𝑀𝑃
∑
𝑓
|
𝑥
𝑥
|
(5)
The amplitude modulated gaussian random
process is known as root mean square. It is associated
with consistent force and non-fatiguing muscle
contractions. Feature Extraction using RMS is quite
popular because it is computationally efficient and
speedy. RMS is stated in Eq.6.
𝑅𝑀𝑆
∑
𝑥
𝑛
(6)
Integrated EMG gives the absolute value of all the
amplitudes. When the signal’s absolute value is
calculated, noise causes the mathematical integral to
grow at a constant rate. IEMG is stated in Eq.7.
𝐼𝐸𝑀𝐺
∑|
𝑥
|
(7)
The overall length of a waveform during a certain
period is referred to as its Waveform length (WL). It
provides comprehensive information about
frequency, amplitude, and duration of the input
signal. Equation for WL is stated in Eq.8.
𝑊𝐿
∑|
𝑥
𝑥
|
(8)
Various Frequency domain features are included
in this research. The amplitude spectrum multiplied
by the frequency spectrum divided by the sum of total
intensity of the spectrum is used to compute mean
frequency.
𝑀𝑁𝐹
(9)
Equation for mean frequency is mentioned in Eq.9
where 𝐴
is the Power spectral density. Median
Frequency (MFD) is a technique for extracting
features based on Power spectral density (PSD).
When it comes to PSD signals there are generally two
types: Parametric and non-parametric. MFD is the
frequency whose spectrum is divided into two equal
parts. Equation for median frequency is mentioned in
Eq.10.
𝐴
𝐴
𝐴
(10)
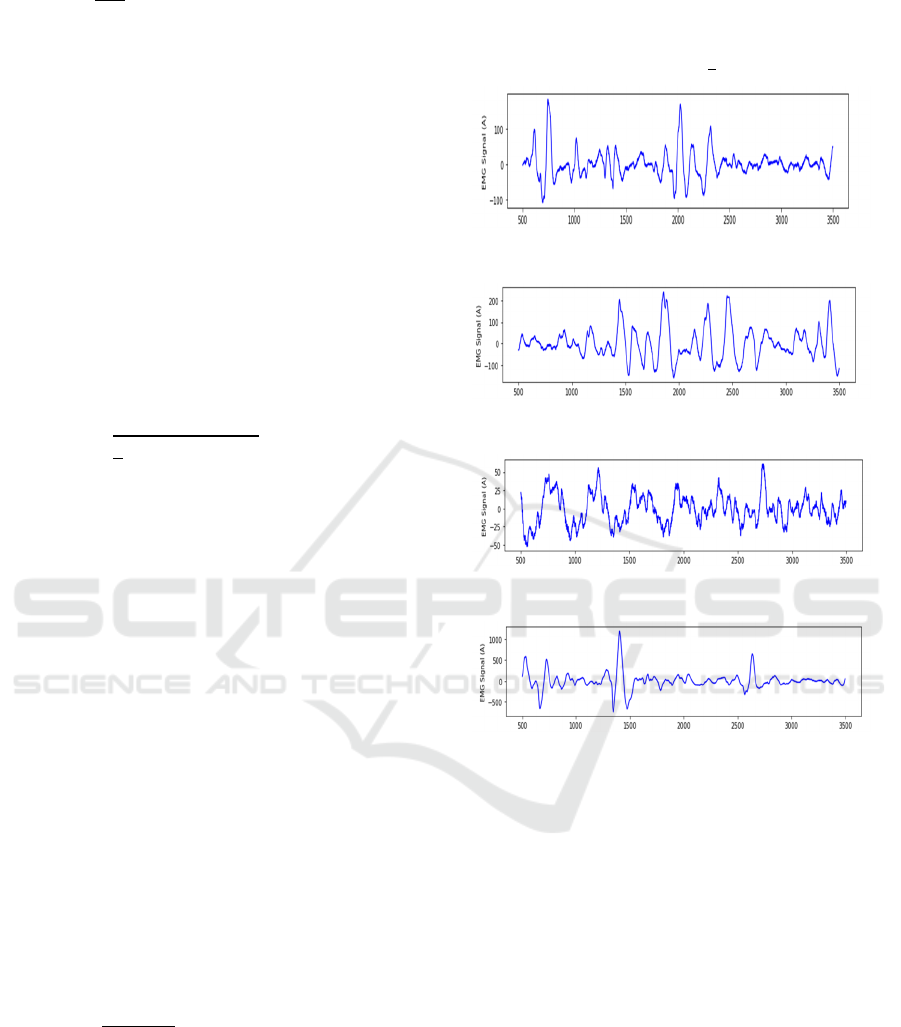
Figure 9: Normal Flexion
Figure 10: Inverted Extension
Figure 11: Inverted Flexion
Figure 12: Normal Extension
Figure 9, 10, 11, and 12 shows the EMG signals
generated during different wrist actions. Figure 9.
describes about Normal Flexion. Figure 10. describes
about Inverted Extension. Figure 11. describes about
Inverted Flexion and Figure 12. describes about
Normal Extension. The EMG signals plotted were
generated for channel-4 which acquired the signal
generated by Extensor Carpi Ulnaris muscle.
Windowing of the signal is a process where we select
a small segment of the waveform to perform further
analysis and operation on the signal. For performing
windowing of the signal, data length of 250, 500 and
1000 were analysed. Figure.13. describes about the
windowing of the signal with 3 different lengths of
data points taken into consideration. It was observed
that the window length of 500 extracts features
discriminative towards class and supports dataset
consistency.
INCOFT 2025 - International Conference on Futuristic Technology
282
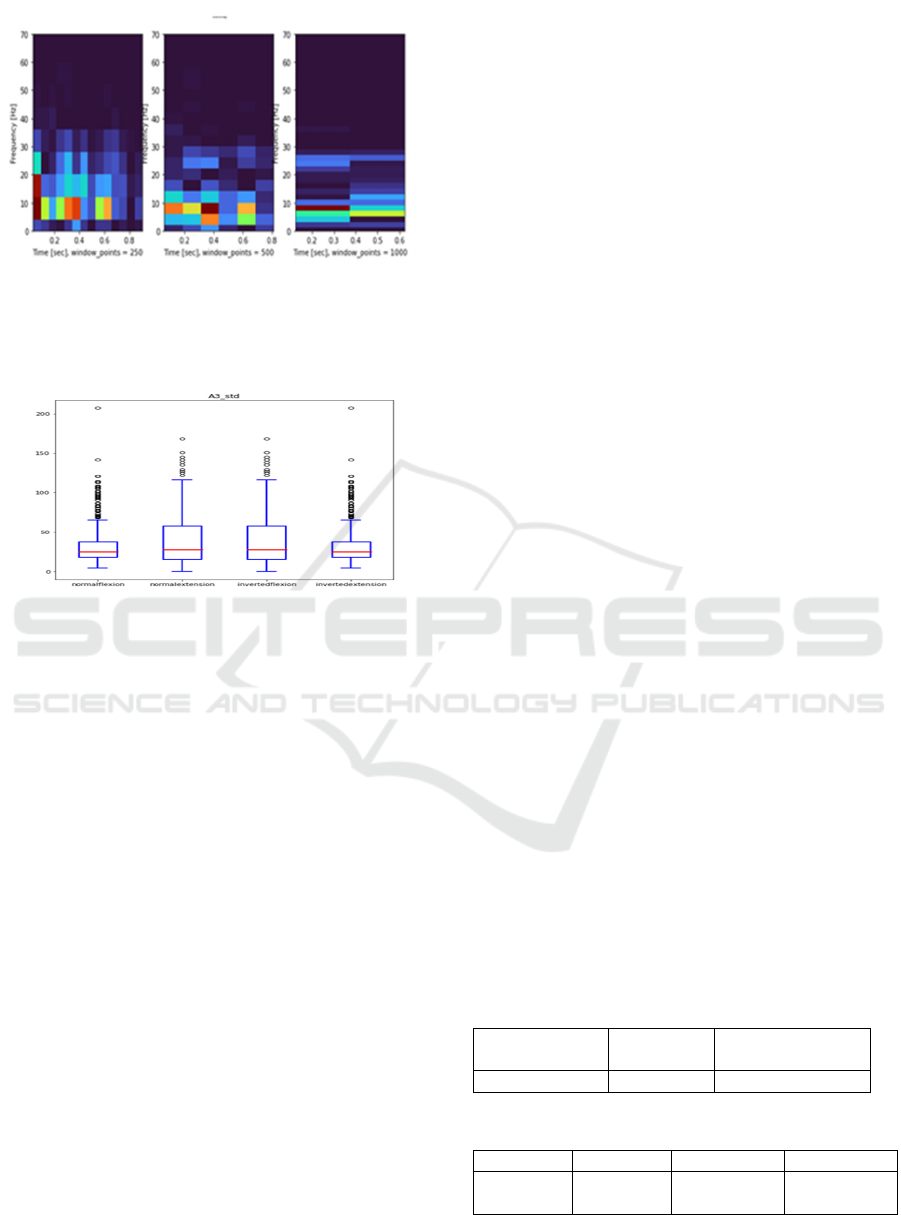
Figure 13: Windowing of signal
Boxplot for all the feature vectors were plotted to
observe the variations. Fig.14. shows the boxplot for
mean features.
Figure 14: Standard deviation Boxplot
The variance or dispersion of a group of values is
quantified by the standard deviation. Data tends to get
scattered more closely around the mean in low
standard deviation, whereas data disperses away from
the mean in high standard deviation. Figure.14.
describes the boxplot where the mean value for the
feature vector is calculated. For all the four actions
the mean value is observed to be between 10-40.
Algorithm 1 provides a mechanism for feature
extraction. The algorithm takes raw EMG signals as
input and trains the model with extracted features.
Bandpass and notch filters are used to filter the
signals for a particular frequency. Bandpass filters are
provided a frequency range of 10Hz-80Hz and notch
filters with 49Hz-51Hz. Thus, the feature vectors are
generated as output.
4 ALGORITHM
Input: Raw EMG Signals
Output: Feature Vector
Initialization:
LOOP Process
1. for filename in folder:
2. Filter using bandstop/notch to remove noise
3. Bandpass filter to preserve signals within a
particular frequency range
4. Select the frequency range using the filter
Sample rate = 512Hz
Bandpass filter = 10Hz-80Hz
Notch filter= 49Hz-51Hz
5. Windowing technique to generate features
Datapoints of 250, 500 and 1000
6. for each window:
7. Extract time domain, frequency domain
and time-frequency domain features
8. end for
9. concatenate features in matrix
10. end for
5 CLASSIFICATION AND
EVALUATION
The solution explored two supervised machine
learning algorithms for binary classification between
wrist flexion and extension in pronated as well as in
supinated form. Following classifiers were evaluated
for their performance to classify these activities: i.
Decision Tree Classifier Decision tree is a tree-based
supervised learning technique where root node
represents the features and leaf node represents the
output. There is a need of choosing suitable attribute
so that the desired output is acquired by splitting the
root node. Attribute selection measurement can be
performed by obtaining Information gain and Gini
Impurity index. In this model an entropy attribute is
used with optimum depth of 3. The biggest advantage
of decision tree is that it is exhaustive in terms of
possibility. Entropy is given in Eq.11.
𝐸
𝑆
∑
𝑃
𝑙𝑜𝑔
𝑝
(11)
Where pi is the probability of class i. This entropy
determines the information gain in each node of the
decision tree.
Table 1: Performance analysis of wrist movements
Training
accurac
y
Testing accuracy
Decision Tree 82.80% 82.12%
Table 2: Performance parameters
Precision Recall F1-score
Decision
Tree
82.12% 82.12% 82.12%
An EMG Based Expert System for Detection of Wrist Flexion and Extension
283

6 RESULTS AND DISCUSSION
Table 1. Shows the training and testing accuracy
obtained. A promising accuracy has been found with
the use of decision trees. Grid search was conducted
for maximum depth from 2 to 24 and estimators
values from 32 to 256 with suitable increment. The
search technique extracted the high accuracy of
82.12%. Decision trees offer promising results in
terms of training and testing accuracy. Table 2. shows
the comparison of the classifiers based on precision,
recall and F1-score.
7 CONCLUSION
This paper presented an electromyography (EMG)
based system for classification and detection of wrist
movement. A 4-channel EMG setup is used for data
acquisition of wrist flexion and extension. For each
muscle group, electrodes were attached to one of four
muscles: Flexor carpi radialis (channel 1), Flexor
carpi ulnaris (channel 2), Extensor carpi radialis
longus (channel 3), and Flexor carpi ulnaris (channel
4). Experimental results suggested that the model
recognized wrist flexion and extension in pronated as
well as in supinated form. Decision Tree classifier
provided a training accuracy of 82.80% and a testing
accuracy of 82.12%. The results indicated that the
muscle activity measured at each electrode placement
offer sufficient information for classifying pronated
and supinated wrist flexion and extension. Authors
integrate and analyse different wrist movements
which is supported by the test and train subject’s
accuracies.
REFERENCES
Zhang, Yi, Xiaodong Zhang, Zhufeng Lu, Zhiming Jiang,
and Teng Zhang. "A Novel Wrist Joint Torque
Prediction Method Based on EMG and LSTM."
International Conference on Cyber Technology in
Automation, Control, and Intelligent Systems, pp. 242-
245, 2020.
Matsumura, Yuji, Minoru Fukumi, and Norio Akamatsu.
"Wrist motion pattern recognition system by EMG
signals." International Conference on Knowledge-
Based and Intelligent Information and Engineering
Systems, pp. 611-617, 2005.
Khokhar, Zeeshan O., Zhen G. Xiao, and Carlo Menon.
"Surface EMG pattern recognition for r (Fady S,
2022)eal-time control of a wrist exoskeleton."
Biomedical engineering online 9, no. 1 pp.1-17, 2010.
Parajuli, N.; Sreenivasan, N.; Bifulco, P.; Cesarelli, M.;
Savino, S.; Niola, V.; Esposito, D.; Hamilton, T.J.;
Naik, G.R.; Gunawardana, U.; Gargiulo, G.D. “Real-
Time EMG Based Pattern Recognition Control for
Hand Prostheses”: A Review on Existing Methods,
Challenges and Future Implementation. Sensors
pp.4596-4598, 2019.
Parajuli, Nawadita, Neethu Sreenivasan, Paolo Bifulco,
Mario Cesarelli, Sergio Savino, Vincenzo Niola,
Daniele Esposito et al. "Real-time EMG based pattern
recognition control for hand prostheses: A review on
existing methods, challenges and future
implementation." Sensors 19, no. 20, pp.4596-4600,
2019.
Selvan, Mercy Paul, Rishi Raj, R. Gowtham Sai, S. Jancy,
and Viji Amutha Mary. "Prosthetic hand using
EMG."Journal of Physics: Conference Series, vol.
1770, no. 1, pp.12-18., 2021.
Qichuan, Ding, Zhao Xingang, and Han Jianda. "A hybrid
EMG model for the estimation of multi joint movement
in activities of daily living." International Conference
on Multi sensor Fusion and Information Integration for
Intelligent Systems, pp. 1-6, 2014.
(Liu, 2019) Liu, Jie, Yupeng Ren, Dali Xu, Sang Hoon
Kang, and Li-Qun Zhang. "EMG-based real-time
linear-nonlinear cascade regression decoding of
shoulder, elbow, and wrist movements in able-bodied
persons and stroke survivors." IEEE Transactions on
Biomedical Engineering 67, no. 5 pp.1272-1281, 2019.
Li, Guanglin, Oluwarotimi Williams Samuel, Chuang Lin,
Mojisola Grace Asogbon, Peng Fang, and Paul
Oluwagbengba Idowu. "Realizing efficient EMG-based
prosthetic control strategy." Neural Interface: Frontiers
and Applications, pp.149-166, 2019.
A. David Orjuela-Cañón, A. F. Ruíz-Olaya and L. Forero,
"Deep neural network for EMG signal classification of
wrist position: Preliminary results," 2017 IEEE Latin
American Conference on Computational Intelligence,
pp. 1-5, 2017.
Orjuela-Cañón, Alvaro David, Andrés F. Ruíz-Olaya, and
Leonardo Forero. "Deep neural network for EMG
signal classification of wrist position: Preliminary
results."Latin American Conference on Computational
Intelligence, pp. 1-5, 2017.
Ziai, Amirreza, and Carlo Menon. "A linear regression
model for estimation of isometric wrist joint torques
with varying arm configurations using EMG signals."
International Conference on Robotics and Biomimetics,
pp. 1230-1235, 2011.
Kim, Sehyeon, Dae Youp Shin, Taekyung Kim, Sangsook
Lee, Jung Keun Hyun, and Sung-Min Park. "Enhanced
Recognition of Amputated Wrist and Hand Movements
by Deep Learning Method Using Multimodal Fusion of
Electromyography and Electroencephalography."
Sensors 22, no. 2 pp.680-685, 2022. `
(Kirsch, 2003) Kirsch, R. F., and J. G. Hincapie.
"Feasibility of EMG-based control of arm movements
via FNS." 25th Annual International Conference of the
IEEE Engineering in Medicine and Biology Society,
vol. 2, pp. 1471-1474, 2003.
INCOFT 2025 - International Conference on Futuristic Technology
284

Pan, Lizhi, Dustin L. Crouch, and He Huang. "Comparing
EMG-based human-machine interfaces for estimating
continuous, coordinated movements." IEEE
transactions on neural systems and rehabilitation
engineering 27, no. 10 pp. 2145-2154, 2019.
Fukuda, Osamu, Toshio Tsuji, Makoto Kaneko, and Akira
Otsuka. "A human-assisting manipulator teleoperated
by EMG signals and arm motions." IEEE transactions
on robotics and automation 19, no. 2 pp.210-222, 2003.
Kurisu, Naoyuki, Nobutaka Tsujiuchi, and Takayuki
Koizumi. "Prosthetic hand control using motion
discrimination from EMG signals."Annual
International Conference of the IEEE Engineering in
Medicine and Biology Society, pp. 6922-6925, 2009.
Lima, Aron A. Martins, Rafael M. Araujo, Fábio A.
Guidotti dos Santos, Victor H. Yoshizumi, Fábio KH
de Barros, Danilo H. Spatti, Luisa HB Liboni, and
Maria E. Dajer. "Classification of hand movements
from emg signals using optimized mlp." International
Joint Conference on Neural Networks (IJCNN), pp. 1-
7, 2018.
Kilic, Ergin. "EMG based neural network and admittance
control of an active wrist orthosis." Journal of
Mechanical Science and Technology 31, no. 12 pp.
6093-6106, 2017.
Kawano, Takuhei, and Koichi Koganezawa. "A method of
discriminating fingers and wrist action from surface
EMG signals for controlling robotic or prosthetic
forearm hand." In 2016 IEEE International Conference
on Advanced Intelligent Mechatronics, pp. 13-18,
2016.
An EMG Based Expert System for Detection of Wrist Flexion and Extension
285
