
Bridging the Synthetic-Real Gap: Unsupervised Domain Adaptation for
Cross-Domain Image Segmentation
N Abhishek, Akshay Poojary, Varsha Sajjanavar, Apeksha Tangod, Sneha Varur and Channabasappa
Muttal
Department of SOCSE, KLE Technological University Hubballi, Karnataka, India
Keywords:
Unsupervised Domain Adaptation (UDA), Cross-Domain Image Segmentation, DeeplabV3+, ResNet-101,
Synthetic-to-Real Adaptation, Autonomous Driving.
Abstract:
It is a challenging problem for cross-domain image segmentation bridging the gap between synthetic and real
worlds, which is very relevant given applications in autonomous driving scenarios. This work proposes an
effective strategy for solving the problem in unsupervised domain adaptation for cross-domain image segmen-
tation; training the model on the GTA5 dataset and testing it on the Cityscapes. We used the ResNet-101
backbone with DeeplabV3+ and exploited its encoder for feature extraction and an upsampling decoder for
effective segmentation. The results show that the approach is quite robust for dealing with domain shifts.
Although a domain gap exists between the synthetic and real datasets, it correctly segments complex urban
scenes. This work makes segmentation models more accurate and generalizable in real applications by using
synthetic training data within an unsupervised learning framework. The two major metrics used to evaluate
the work are IoU and mean IoU (mIoU). Our method reached a mIoU of 55.80%, outperforming most state-
of-the-art UDA methods for the cross-domain segmentation task.
1 INTRODUCTION
Unsupervised Domain Adaptation (UDA) for Cross-
domain image segmentation is a crucial area in the
computer vision world, where labeled data are rare or
expensive. This problem is becoming more noticeable
in regions, such as medical imaging and satellite im-
age analysis, especially when referring to self-driving
cars since their data comes from various domains -
source and target thus likely with varying appearance,
scale, or even texture.(Hoffman et al., 2018) Unsuper-
vised domain adaptation for cross-domain image seg-
mentation refers to the adaptation of a segmentation
model, which is trained on labeled data from a source
domain, such that it works effectively on an unlabeled
target domain without any ground truth available for
it.
Traditionally, Image segmentation relies highly
on annotated data. However, obtaining labeled
datasets for every domain of interest is often in-
feasible. Thus, UDA has been one of the promis-
ing approaches in leveraging labeled data from the
source domain and adapting it to an unlabeled target
domain, therefore saving the expensive annotations.
Current approaches in UDA for image segmentation
learn domain-invariant features that can be general-
ized across domains.(Tsai et al., 2018)
Common application methods include adversarial
training with a discriminator used here, which tries
to classify features coming from both source and tar-
get domains according to whether they belong to spe-
cific spaces while the extractor tries not to be de-
tectable as features are constructed to contain rich
representation-independent of origin in the original
space. There have been positive responses apply-
ing adversarial learning between these spaces (Tzeng
et al., 2017). Some application methods demonstrated
the potential of cycle-consistent adversarial domain
adaptation (CyCADA) in bridging the domain gap,
particularly in scenarios involving significant visual
differences.(Hoffman et al., 2018) Further improve-
ments in such methods include the application of
cycle-consistency losses, where it is possible to trans-
form back from the target domain to the source do-
main to further improve the adaptability of the seg-
mentation model (Zhou et al., 2019). These methods
reduce the discrepancy in the distribution of domains
and lead to improved performance in the target do-
254
Abhishek, N., Poojary, A., Sajjanavar, V., Tangod, A., Varur, S. and Muttal, C.
Bridging the Synthetic-Real Gap: Unsupervised Domain Adaptation for Cross-Domain Image Segmentation.
DOI: 10.5220/0013613500004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 254-262
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.

main with better segmentation.
Semantic consistency is the other critical appli-
cation role for cross-domain segmentation based on
UDA. One way to guarantee that this model knows
the context of a segmented region in the target do-
main is by aligning higher semantic features across
different domains.
Some further recent works included self-training
strategies that produce pseudo-labels during training
in the target domain and iterated throughout. The
works explored learning from synthetic data and gen-
erating pseudo-labels, addressing domain shift chal-
lenges (Sankaranarayanan et al., 2018). It is an-
ticipated that using the target domain’s unlabeled
data will improve the robustness of the segmentation
model and achieve performance improvement with-
out manual labeling. Although good progress is be-
ing made, the problem remains with domain shift
and, more specifically, where domains are quite dif-
ferent to overcome (Tzeng et al., 2017). Soon, this
area of UDA for image segmentation offers greater
scope in feature alignment and multi-modality to bet-
ter cope with the real world’s complexity (Zhang
et al., 2020a).
The objectives of our work are:
• To utilize an encoder-decoder framework with
ResNet-101 as the backbone and integrate
DeeplabV3+ for feature extraction and segmenta-
tion.
• To attain a good mIoU score that outperforms
some existing state-of-the-art methods in the
”GTA5 to Cityscapes” domain adaptation task.
The paper is structured as follows: Section 1 in-
troduces the motivation and objectives behind lever-
aging unsupervised domain adaptation (UDA) to
tackle the challenges of cross-domain image segmen-
tation. Section 2 reviews existing approaches like
adversarial learning and transformer-based architec-
tures, highlighting their limitations. Section 3 de-
tails the methodology, including ResNet-101 with
DeeplabV3+ architecture and adaptation strategies.
Section 4 presents experimental results on GTA5 and
Cityscapes datasets using IoU and mIoU metrics.
Section 5 concludes with findings and future direc-
tions.
2 LITERATURE SURVEY
Several methods address domain shift issues, in-
cluding adversarial learning, self-supervised learn-
ing, transformer-based architectures (Xu et al., 2021),
and synthetic-to-real domain adaptation techniques.
Among these, adversarial learning stands out with
generative adversarial networks (GANs) being used
to align feature distributions between the source and
target domains. CycleGAN (Zhu et al., 2017), as
shown in Fig. 5, employs cycle-consistent adversar-
ial networks for unpaired image-to-image translation,
mitigating discrepancies in appearance, such as color,
texture, and illumination.
Building upon this, Volpi et al. (Volpi et al., 2018)
proposed the MCD (Minimum Class Discrepancy)
method, which uses adversarial learning to minimize
class discrepancies between domains. By aligning the
class-wise predictions of a segmentation model across
both domains, MCD improves pixel-wise consistency
and enables robust transferability between source and
target domains. This method is particularly effective
when using synthetic datasets like GTA5 and real-
world datasets like Cityscapes, where visual charac-
teristics differ significantly.
Self-supervised learning also plays a critical role
by helping learn domain-invariant features. Bous-
malis et al. (Bousmalis et al., 2016) introduced do-
main separation networks to separate domain-specific
features from domain-invariant ones. This technique
ensures that only relevant features for segmentation
are learned, regardless of domain-specific variations.
Similarly, Chen et al. (Chen et al., 2020) proposed a
contrastive learning framework for domain adaptation
that maximizes intra-domain similarity while mini-
mizing inter-domain similarity, enabling robust fea-
ture learning.
The DAFormer framework, introduced by Xu et
al. (Xu et al., 2021), as shown in Fig. 6, repre-
sents a significant leap in cross-domain segmentation.
Using a transformer-based architecture, DAFormer
leverages self-attention mechanisms to capture both
local and global contextual information. These ca-
pabilities are especially useful for segmenting com-
plex urban environments, as seen in datasets like
Cityscapes. DAFormer’s ability to focus on underrep-
resented classes and refine pseudo-labels during train-
ing improves its adaptability to target domain data.
For synthetic-to-real domain adaptation, Tsai et al.
(Tsai et al., 2018) introduced AdaptSegNet, combin-
ing image-level and feature-level adaptation through
adversarial learning. By aligning the structured out-
put predictions of segmentation models, AdaptSeg-
Net reduces domain discrepancies, ensuring that the
model learns robust and domain-invariant representa-
tions.
Multi-task learning (MTL) has also gained pop-
ularity for improving cross-domain segmentation.
Zhang et al. (Zhang et al., 2020b) leveraged MTL
to optimize segmentation and related tasks, such as
Bridging the Synthetic-Real Gap: Unsupervised Domain Adaptation for Cross-Domain Image Segmentation
255
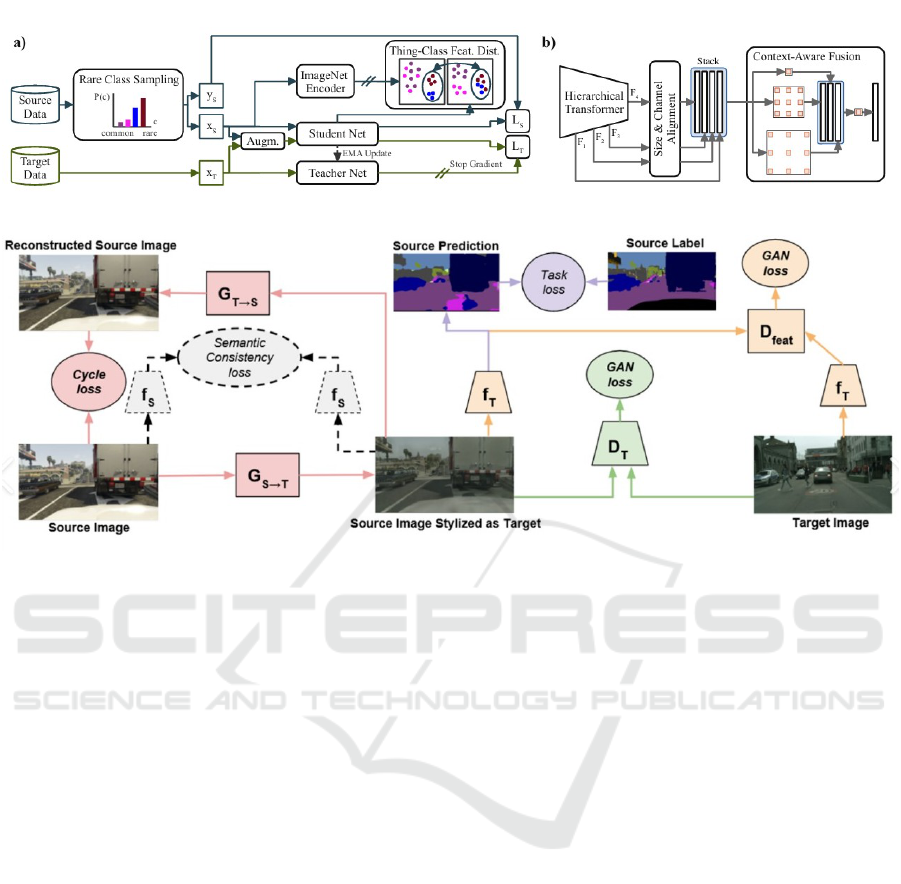
Figure 1: Cross domain adaptation using DAformer framework (Xu et al., 2021)
Figure 2: Cross domain adaptation using CycleGAN(Zhu et al., 2017)
object detection or depth estimation, allowing for
better generalization across domains. In scenarios
such as night-time segmentation or low-light envi-
ronments, specialized architectures are necessary to
handle domain-specific challenges. SEANet, intro-
duced by Zhang et al. (Zhang et al., 2020c), employs
a squeeze-enhanced axial attention mechanism to fo-
cus on critical spatial features under low-light condi-
tions, enabling better performance in nighttime seg-
mentation tasks. . The literature work points to some
gaps such as difficulty in aligning features between
source and target domains, minimizing class discrep-
ancies, and learning domain-invariant features. It also
highlights issues with segmenting complex environ-
ments, adapting to dynamic changes, and making use
of multi-modal data. Our approach tackles these by
using an encoder-decoder structure with ResNet-101
and DeeplabV3+. This helps to align features bet-
ter, reduce class discrepancies, and improve segmen-
tation accuracy across domains. The architecture also
enables robust learning of domain-invariant features,
which enhances performance in complex urban en-
vironments. While it doesn’t fully address dynamic
domain shifts, the model is flexible and could be ex-
tended in the future to incorporate multi-modal data,
further improving domain alignment.
3 BACKGROUND STUDY
3.1 Resnet-101
ResNet-101 is a deep convolutional neural network
(CNN) designed to address the vanishing gradient
problem in very deep networks by using residual con-
nections, or shortcuts, that bypass one or more lay-
ers. These connections allow smoother gradient flow
during training, making it possible to train very deep
networks without losing performance. The architec-
ture consists of 101 layers, with residual blocks where
the input is added to the output, helping preserve
feature identity. This design prevents performance
degradation as the network depth increases, making
ResNet-101 effective for tasks like classification, de-
tection, and segmentation. In our research, it serves as
the backbone for DeeplabV3+, providing hierarchical
features crucial for high-quality segmentation.
3.2 Deeplabv3+
DeeplabV3+ is an advanced model for semantic im-
age segmentation, designed to excel in challenging
environments like urban scenes. It builds on ear-
lier versions with several key improvements. At its
core, DeeplabV3+ uses a fully convolutional network
INCOFT 2025 - International Conference on Futuristic Technology
256
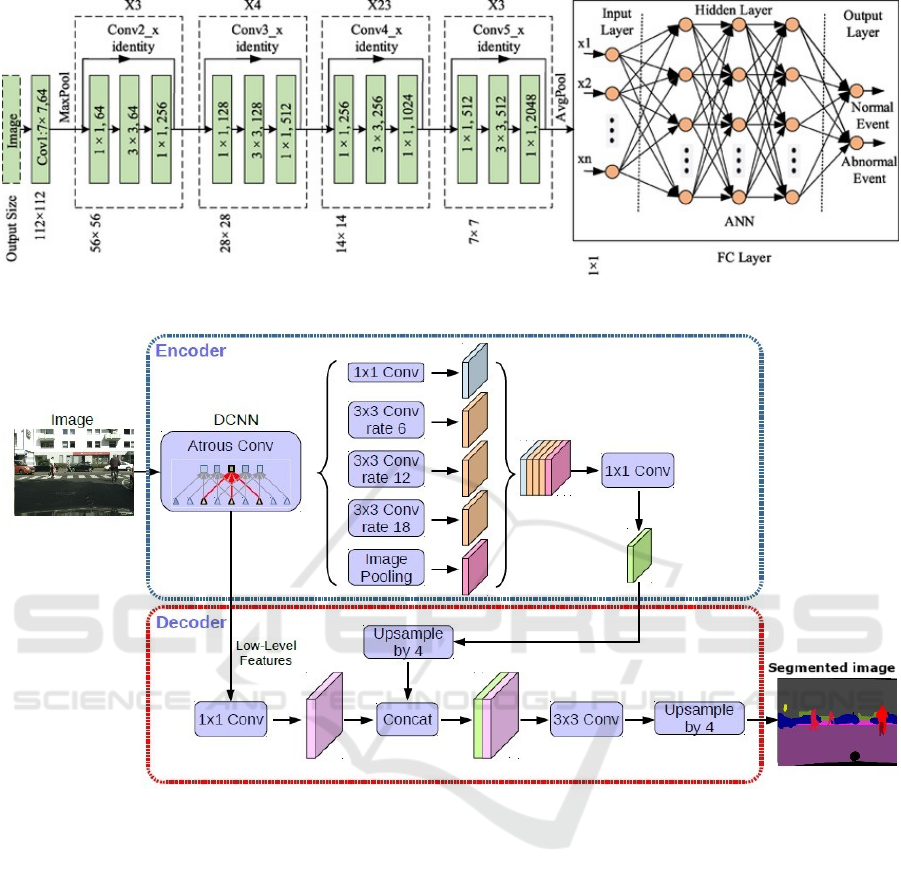
Figure 3: ResNet-101 architecture (Zhang et al., 2020a)
Figure 4: Deeplabv3+ architecture
(FCN) and employs Atrous Convolutions (also called
Dilated Convolutions). These help the model capture
context at multiple scales by expanding its field of
view without adding extra parameters, making it bet-
ter at identifying objects of different sizes. One of its
standout features is the Atrous Spatial Pyramid Pool-
ing (ASPP) module, which uses convolutions with
different dilation rates to gather features at various
scales. This allows the model to understand both
the bigger picture and the finer details. DeeplabV3+
takes it a step further by adding a decoder module,
which refines the segmentation results using informa-
tion from earlier network layers. This added step en-
sures more accurate and detailed segmentations, mak-
ing it a powerful tool for a wide range of tasks.
3.3 Integration of ResNet-101 and
DeeplabV3+
In our research, combining ResNet-101 for feature
extraction with DeeplabV3+ for segmentation allows
us to capitalize on the strengths of both architectures.
ResNet-101’s deep residual learning captures rich, hi-
erarchical features, while DeeplabV3+’s dilated con-
volutions and ASPP module significantly improve
segmentation, especially when dealing with the multi-
scale nature of complex scenes. This synergy ensures
that your model delivers accurate and robust segmen-
tation results, even when faced with domain shifts be-
tween synthetic and real-world datasets.
Bridging the Synthetic-Real Gap: Unsupervised Domain Adaptation for Cross-Domain Image Segmentation
257

4 METHODOLOGY
4.1 Proposed Pipeline architecture
Our proposed pipeline architecture for unsupervised
cross-domain image segmentation is based on pre-
trained DeepLabv3+ as shown in Fig.4, Which in-
corporates several innovative enhancements to bet-
ter segmentation and adaptation across domains. Our
model starts with an input preprocessing stage where
RGB images of size 512×512 are normalized and
passed through to an augmentation module, which
does domain-specific transformations including color
jitter, Gaussian blur, random cropping, and noise in-
jection to make the network robust against domain
shifts, which occurs during training
The proposed model leverages pre-trained
ResNet-101 3 as its backbone, demonstrating the
ability to extract very rich hierarchical features.
Using atrous convolutions with dilation rates 6, 12,
and 18 effectively captures context at multiple scales.
Another important component is the adaptive atrous
layers, which dynamically adjust dilation rates to
align with domain-specific input statistics, aiming to
achieve domain robustness. Furthermore, a global
context module is integrated to enhance feature
extraction capabilities. This module aggregates
domain-invariant global features using enhanced
global average pooling with learnable weighting,
focusing on the most important channels of the
feature maps.
The Atrous Spatial Pyramid Pooling module is
central to multi-scale feature extraction. Improve-
ments are introduced with dynamic dilation rates tai-
lored to the target domain and a channel attention
mechanism that selectively focuses on relevant fea-
ture maps while suppressing irrelevant information.
This mechanism effectively accounts for variations in
object scales and domain characteristics.
The decoder is designed to restore spatial resolu-
tion by incorporating semantic information. The en-
coder combines high-level semantic features with im-
proved skip connections and domain-specific atten-
tion layers, using low-level features extracted from
earlier layers of the encoder. These features are fur-
ther refined with 1 × 1 convolutions. The decoder
progressively upsamples feature maps using bilinear
interpolation and convolutional layers to recover fine
spatial details, ultimately generating accurate seg-
mentation maps at the input resolution.
Domain adaptation techniques are employed to
handle domain shifts. A domain-specific batch nor-
malization layer computes its statistics dynamically at
training time to adapt to the characteristics of the tar-
get domain. Moreover, an auxiliary domain discrim-
inator network introduces an adversarial loss penal-
izing large domain discrepancies to align the feature
distributions of the source and target domains.
Resnet-101 involves an iterative quality improve-
ment in a pseudo-label self-training loop; thereby, it
exploits the model with high-confidence predictions
to its greater advantage. Furthermore, the method
is trained by multiple resolutions, since the resolu-
tion dealt with differs for different domains. The fi-
nal classifier produces a semantic segmentation map
of 19 distinct classes, which is optimized using both
cross-entropy losses on the source domain’s data and
domain alignment loss such that the synthetic-real gap
is bridged. Semantic segmentation requires classi-
fying each pixel of an image into one of the C se-
mantic classes. The cross-entropy loss computes the
difference between what the model predicts as the
class probabilities for each pixel and the ground truth
labels for each pixel. The model outputs a tensor
of shape [B,C,H,W] where B: Batch size, C: Num-
ber of classes, H,W: Spatial dimensions of the im-
age. Ground Truth Labels (Y) as a tensor of shape
[B,C,W] where each pixel is assigned an integer label
0 ≤ l < C, denoting the class. Predicted probabili-
ties for each class at pixel i, obtained by applying the
softmax function.
p
i,c
=
exp(ˆy
i,c
)
∑
C
c=1
exp(ˆy
i,c
)
(1)
For each pixel i, the cross-entropy loss compares
the predicted probability distribution across classes to
the true label and is given by:
ℓ
i
= −
C
∑
c=1
y
i,c
· log(p
i,c
) (2)
The aggregated cross-entropy loss over all N pix-
els in the image is typically averaged and defined as:
L
CE
= −
1
N
N
∑
i=1
C
∑
c=1
y
i,c
· log(p
i,c
) (3)
Where:
1. N: Total number of pixels in the input batch, com-
puted as N = B × H ×W
4.2 Implementation Details
Hardware and Framework: The model is imple-
mented in TensorFlow and trained on a GPU with
48 GB of NVIDIA L40S (Lightning AI). The train-
ing utilizes a learning rate of 0.001 with exponential
decay, the Adam optimizer, and cross-entropy loss for
image segmentation tasks.
INCOFT 2025 - International Conference on Futuristic Technology
258
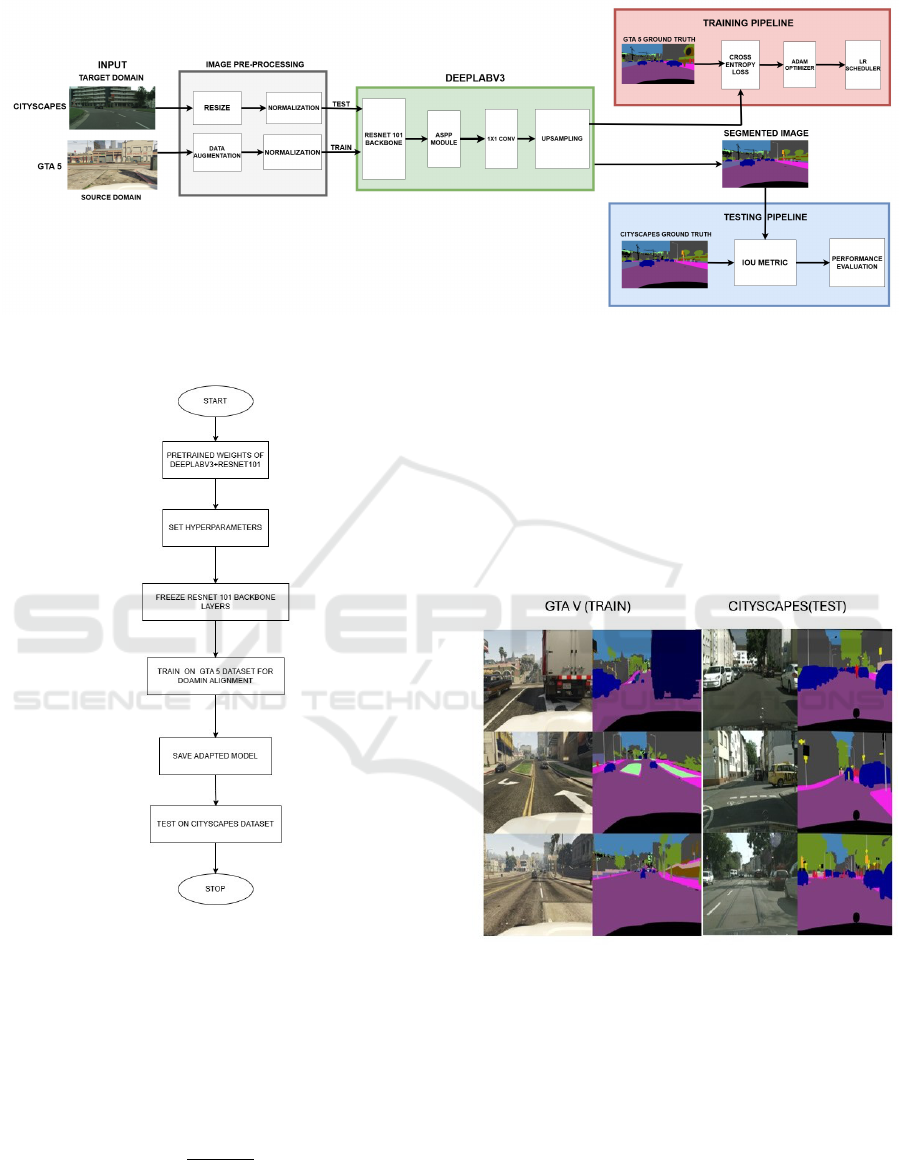
Figure 5: Proposed pipeline architecture
Figure 6: schematic representation of system model
The input image is downsampled to 1280x640 and
randomly cropped to 512x512 for training. The dis-
criminator also uses the Adam optimizer, with a learn-
ing rate set to 0.0001. Both the segmentation model
and the discriminator use polynomial learning rate de-
cay by multiplying the learning rate by a factor
1 −
iter
total iter
0.9
(4)
. We define the total iteration as Run for 1000 itera-
tions with an early-stop policy.
5 RESULTS AND ANALYSIS
5.1 Dataset description
There are two datasets used in our work, One is the
training dataset which is the GTA5 dataset and an-
other is the testing dataset which is the CITYSCAPES
dataset.
Figure 7: Training and testing datasets
GTA5 Dataset(Richter et al., 2016): This is a syn-
thetic dataset from the GTA5 game with 24,966 high-
resolution images (1914×1052 pixels). It consists of
pixel-perfect annotations of 19 semantic classes that
reproduce the real-world urban scene, such as roads,
vehicles, and pedestrians. Its virtual environment en-
sures that it is a large, cost-effective, and diverse data
source, but it creates a domain gap when applied to
real-world tasks.
Cityscapes Dataset(Cordts et al., 2016): Real-
world dataset of 5,000 images divided into the train
Bridging the Synthetic-Real Gap: Unsupervised Domain Adaptation for Cross-Domain Image Segmentation
259
set (2,975), validation set (500), and test set (1,525).
Captured in German cities with a consistent resolution
of 2048×1024 pixels. It offers dense annotations for
19 semantic classes, with a focus on urban landscapes
and high-quality benchmarks for real-world applica-
tions.
These datasets have been combined to allow the
researcher to study these challenges of domain adap-
tation. The models are first trained on synthetic data
from the GTA5 source domain and then tested on real-
world data from the Cityscapes dataset., which is con-
sidered a target domain. This approach here further
pushes efforts made for unsupervised domain adapta-
tion techniques.
5.2 Evaluation
This section assesses the performance of the pro-
posed system using standard statistical metrics. To
gauge the system’s effectiveness, we conducted a
thorough comparison of per-class Intersection over
Union (IoU) scores and the mean IoU (mIoU) per-
centage for the ”GTA5 to Cityscapes” domain adap-
tation task. These metrics are essential for measur-
ing how well our model adapts from the synthetic
GTA5 dataset to the real-world Cityscapes dataset,
ensuring it performs well across diverse domains. Our
evaluation highlights the system’s ability to general-
ize across domains, with detailed analysis showcas-
ing performance across individual semantic classes.
The per-class IoU scores provide insights into the sys-
tem’s strengths and limitations for specific object cat-
egories, while the overall mIoU serves as a robust
metric for overall segmentation quality. These results
underline the model’s capability to achieve competi-
tive cross-domain segmentation performance.
We now present a comparison of the performance
of various methods on the semantic segmentation task
for the ”GTAV to Cityscapes” dataset. The methods
are evaluated based on per-class IoU scores for indi-
vidual classes, as well as the overall mean Intersection
over Union (mIoU), which combines the IoUs across
all classes.
The key takeaways from the results are summa-
rized as follows:
Overall Performance (mIoU):
The method Ours achieved the highest mIoU score
at 55.80 compared to all the methods in the table 1.
Thus, it proves that Our approach outperforms several
other state-of-the-art techniques, namely DPR (Ding
et al., 2019) with 46.5, DISE (Zhao et al., 2019) with
45.4, and AdvEnt (Vu et al., 2019a) with 45.5, prov-
ing the efficiency of our model concerning adapta-
tion to the ”GTAV to Cityscapes” domain shift. Our
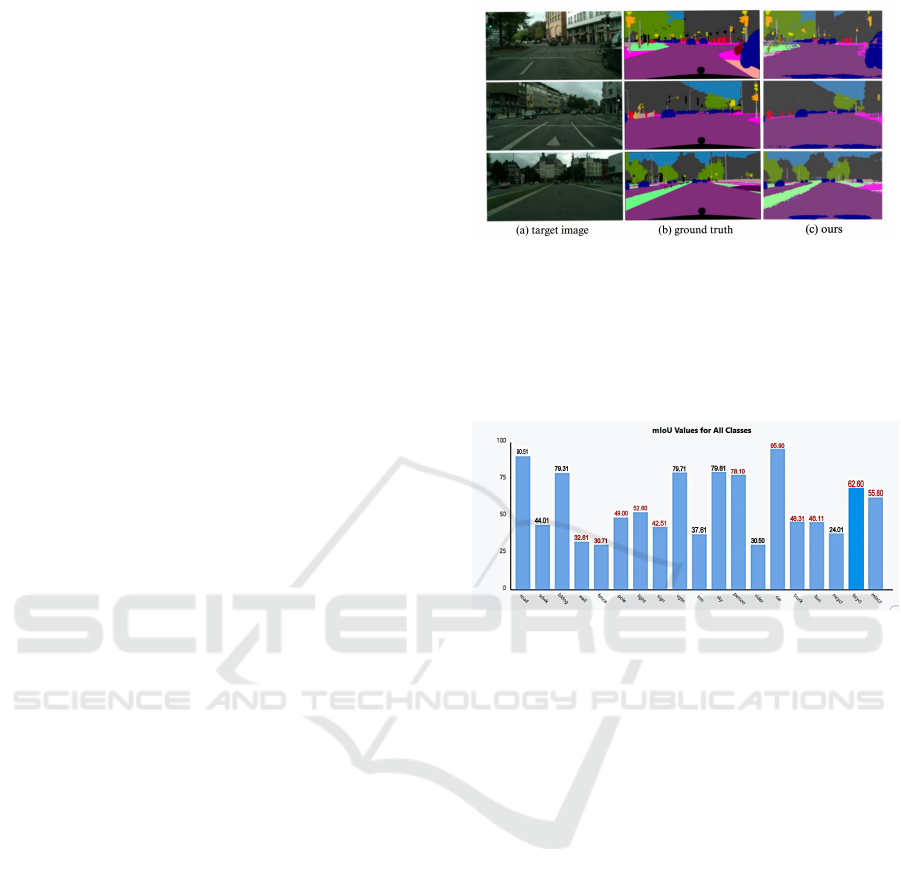
Figure 8: Results showing target image, Ground truth and
segmented image
model outperforms several of the existing approaches,
including SIBAN (Sibi et al., 2019) which reported
mIoUs of 42.6.
Class-wise IoU Analysis:
Figure 9: Graph showing class-wise IoU values and mIoU
High-performing classes: In some classes, our
model works well. For example, IoU for the car
class is 95.90, which is the highest in the table 1 and
beats other methods. This means that our model has
learned to segment cars in different contexts and do-
main shifts. Besides, our model achieved a pretty high
bus IoU score of 46.31 compared to other methodolo-
gies and indicates robustness for the vehicle detection
task, especially larger vehicles like buses. Person and
truck classes: Our proposed method has a person IoU
of 78.10, far ahead of most of the methods, thereby in-
dicating the competency of our method to adequately
segment humans. Truck IoU of 46.11 is also compet-
itive and well shows the segmentation ability of large
vehicles.
Comparison with state-of-the-art methods:
DPR (Ding et al., 2019), using ResNet-101 as
a backbone, achieves a mIoU of 46.5 which is ac-
ceptable but seriously lags behind our method (9.3
percentage points). Methods DISE (Zhao et al.,
2019) and AdvEnt (Vu et al., 2019a)] which achieved
smaller mIoUs (45.4 and 45.5 respectively) also sup-
port the conclusion drawn here that our approach does
better for this adaptation task. CLAN (Liu et al.,
2020a) and SIBAN (Sibi et al., 2019) outperform
some but still lag behind our method with mIoUs of
INCOFT 2025 - International Conference on Futuristic Technology
260
Table 1: Comparison on ”GTAV to Cityscapes” in terms of per-class IoUs and mIoU (%).
Method Base Model road sdwk bldng wall fence pole light sign vegtn trm sky person rider car truck bus train mcycl bcycl mIoU
DPR (Ding et al., 2019) ResNet-101 92.3 51.9 82.1 29.2 25.1 24.5 33.8 33.0 82.4 32.8 82.2 58.6 27.2 84.3 33.4 46.3 2.2 29.5 32.3 46.5
SIBAN (Sibi et al., 2019) ResNet-101 88.5 35.4 79.5 26.3 24.3 28.5 32.5 18.3 81.2 40.0 76.5 58.1 25.8 82.6 30.3 34.4 3.4 21.6 21.5 42.6
AdaptSeg (Tsai et al., 2018) ResNet-101 86.5 36.0 79.9 23.4 23.3 23.9 35.2 14.8 83.4 33.3 75.6 58.6 27.6 73.7 32.5 35.4 3.9 30.1 28.1 42.4
CLAN (Liu et al., 2020a) ResNet-101 87.0 27.1 79.6 27.3 23.3 28.3 35.5 24.2 83.6 27.4 74.2 58.6 28.0 76.2 33.1 36.7 6.7 31.9 31.4 43.2
DISE (Zhao et al., 2019) ResNet-101 91.5 47.5 82.5 31.3 25.6 33.0 33.7 25.8 82.7 28.8 82.7 62.4 30.8 85.2 27.7 45.0 6.4 25.2 24.4 45.4
AdvEnt (Vu et al., 2019b) ResNet-101 89.4 33.1 81.0 26.6 26.8 27.2 33.5 24.7 83.9 36.7 78.8 58.7 30.5 84.8 38.5 44.5 1.7 31.6 32.4 45.5
MSL (Liu et al., 2020b) ResNet-101 89.4 43.0 82.1 30.5 21.3 30.3 34.7 24.0 85.3 39.4 78.2 63.0 22.9 84.6 36.4 43.0 5.5 34.7 33.5 46.4
DLOW (Shaban et al., 2018) ResNet-101 87.1 33.5 80.5 24.5 13.2 29.8 29.5 26.6 82.6 26.7 81.8 55.9 25.3 78.0 33.5 38.7 6.0 22.9 34.5 42.3
Ours ResNet-101 90.51 44.01 79.31 32.61 30.71 49.00 52.60 42.51 79.71 37.61 79.81 78.10 30.50 95.90 46.31 46.11 38.40 24.01 62.60 55.80
43.2 and 42.6, respectively, and relatively lower per-
formance on specific classes like bus and truck.
6 CONCLUSION
We present a novel approach to unsupervised domain
adaptation by leveraging the encoder-decoder frame-
work with a memory-based regularization technique.
Our method utilizes intra-domain knowledge to re-
duce uncertainty during model learning, without in-
troducing additional parameters or external modules.
By using the model itself as a memory module, we
achieve an elegant and efficient regularization of the
training process. Despite its simplicity, our approach
complements existing methods and delivers compet-
itive performance on two prominent synthetic-to-real
benchmarks: GTA5 to Cityscapes.
Our results demonstrate that the proposed model
effectively addresses challenges in domain adapta-
tion, achieving robust segmentation performance by
reducing the domain gap. The integration of memory-
based regularization highlights the potential for lever-
aging inherent model properties to improve training
stability and accuracy.
Future enhancements could focus on designing
models that are inherently robust to environmental
variations, such as changes in lighting, texture, and
adverse conditions. Additionally, advancements in
adversarial learning techniques, such as improved
methodologies inspired by CycleGAN, may further
enhance domain correspondences. Self-supervised
learning approaches could also play a significant
role in reducing dependency on annotated datasets
while fostering the extraction of domain-invariant fea-
tures. Finally, exploring segmentation models based
on transformers and expanding testing across diverse
datasets, including scenarios with low lighting and
adverse weather, can provide deeper insights into the
adaptability of the proposed system.
REFERENCES
Bousmalis, K., Frosio, N. D., Bursuc, D., Hays, J.,
Tsoumakas, G., and Metaxas, D. N. (2016). Domain
separation networks. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1709–1717.
Chen, W., Wei, Y., Yang, Y., Wang, Z., Li, W., and Wang, X.
(2020). Contrastive learning for unsupervised domain
adaptation. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 7568–7577.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., F., R., Y., A., and Schiele, B. (2016). The
cityscapes dataset for semantic urban scene under-
standing. Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 3213–3223.
Ding, Z., Wang, Q., Huang, J., Zhang, K., and Xie, L.
(2019). Dpr: Domain propagation network for cross-
domain semantic segmentation. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 3330–3340.
Hoffman, J., Tzeng, E., Park, T., Saenko, K., and Darrell, T.
(2018). Cycada: Cycle-consistent adversarial domain
adaptation. In Proceedings of the International Con-
ference on Machine Learning (ICML), pages 1996–
2005.
Liu, L., Lu, H., Lee, L., Yang, M., Wong, T.-L., Wu, D., and
Lin, Y.-W. (2020a). Clan: Class-wise alignment for
unsupervised domain adaptation in semantic segmen-
tation. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 2249–2257.
Liu, W., Chen, B., Zhang, Z., Li, X., and Li, X. (2020b).
Msl: Multi-scale learning for domain adaptation
in semantic segmentation. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 4706–4715.
Richter, S., D., V. W. W., M., R., R., A., A., M., and A., M.
(2016). Playing for data: Ground truth from computer
games. In Proceedings of the European Conference on
Computer Vision (ECCV), pages 102–118. Springer.
Sankaranarayanan, S., Balaji, Y., Jain, A., Kumar, S. R.,
and Gupta, A. (2018). Learning from synthetic data:
Addressing domain shift for semantic segmentation.
Bridging the Synthetic-Real Gap: Unsupervised Domain Adaptation for Cross-Domain Image Segmentation
261

In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 2701–
2710.
Shaban, A., Zhang, T., Fang, W., Zhang, Y., Xiang, T., and
Li, Z. (2018). Dlow: Domain-learning by optimiz-
ing the distribution of labels in unsupervised domain
adaptation. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 5367–5376.
Sibi, P., Viswanath, V., Bhat, P., Mottaghi, R., and Farhadi,
A. (2019). Siban: Segmentation-invariant batch nor-
malization for cross-domain semantic segmentation.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision (ICCV), pages 4550–
4559.
Tsai, Y.-H., Chiu, W.-C., Hsu, H.-W., Sun, M., and Yang,
M.-H. (2018). Adaptsegnet: Adversarial adaptation
for semantic segmentation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 6956–6965.
Tzeng, E., Hoffman, J., Saenko, K., and Darrell, T. (2017).
Adversarial discriminative domain adaptation. Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 7167–7176.
Volpi, M., Mancini, M., Bria, A. M., Massemini, R., and
Perona, P. (2018). Minimum class discrepancy for
domain adaptation. In Proceedings of the European
Conference on Computer Vision (ECCV), pages 602–
617.
Vu, D., Cheng, W.-L., Yang, Y., Kumar, N., Lee, H., and
Lin, M.-H. (2019a). Advent: Adversarial entropy
minimization for domain adaptation in semantic seg-
mentation. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision (ICCV), pages
2226–2235.
Vu, T.-H., Jain, H., Bucher, M., Goldluecke, B., and Gool,
L. V. (2019b). Advent: Adversarial entropy minimiza-
tion for domain adaptation in semantic segmentation.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 2517–
2526.
Xu, Y., Shen, X., Li, Y., Duan, X., Zhang, Z., and Jia, J.
(2021). Daformer: Domain-adaptive transformer for
cross-domain semantic segmentation. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 8983–8992.
Zhang, L., Wen, L., Ji, R., and Luo, P. (2020a). Align-
ing higher semantic features for cross-domain image
segmentation. In Proceedings of the European Con-
ference on Computer Vision (ECCV), pages 49–65.
Zhang, Y., Wei, Z., Liu, Z., Yang, S., and Wei, Z. (2020b).
Multi-task learning for cross-domain semantic seg-
mentation. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 4503–4512.
Zhang, Y., Wei, Z., Liu, Z., Yang, S., and Wei, Z. (2020c).
Seanet: Squeeze-enhanced axial attention network for
nighttime segmentation. In Proceedings of the IEEE
International Conference on Computer Vision (ICCV),
pages 4535–4544.
Zhao, H., Li, X., Zhang, Z., Wang, H., and Wang, X.
(2019). Dise: Domain invariant semantic embeddings
for cross-domain semantic segmentation. In Proceed-
ings of the IEEE/CVF International Conference on
Computer Vision (ICCV), pages 3341–3349.
Zhou, L., Di, X., and Yao, J. (2019). Cycle-consistent
generative adversarial networks for unsupervised do-
main adaptation in image segmentation. In Proceed-
ings of the International Conference on Medical Im-
age Computing and Computer-Assisted Intervention
(MICCAI).
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In Proceedings of the
IEEE International Conference on Computer Vision
(ICCV), pages 2223–2232.
INCOFT 2025 - International Conference on Futuristic Technology
262
