
Few-Shot Object Detection Using Two Stage Fine Tuning Approach with
Data Augmentation
Vishwa M. Badachi
a
, Shreya P. Inamdar
b
, Fardeen Vaddo
c
, Sai Satya B. V.
d
, Uday Kulkarni
and Shashank Hegde
School of Computer Science and Engineering, KLE Technological University, Vidya Nagar, Hubballi, India
Keywords:
Few-Shot Object Detection, Cutout, Detectron2, MS COCO, Data Augmentation, ResNet, Two-Stage
Fine-Tuning.
Abstract:
Few-Shot Object Detection (FSOD) is a specialized area within object detection that focuses on the task
of identifying and localizing objects from unseen classes using only a small number of labeled examples.
This is particularly important when data collection and labeling are expensive or impractical. To address
this challenge, a novel two-stage fine-tuning approach combined with cutout data augmentation to improve
both detection accuracy and generalization is proposed. The proposed method uses the Detectron2, a popu-
lar open-source library for object detection. The training process is divided into two stages to improve the
model’s performance. To address the challenges associated with the limited availability of labeled examples,
the method incorporates cutout data augmentation. Cutout augmentation involves masking random rectangu-
lar regions within training images. This augmentation technique introduces additional variation in the training
data, enabling the model to focus on the important features of objects rather than overfitting to specific patterns
or regions, leading to improved detection performance, especially in data-scarce scenarios. The performance
of the proposed method was evaluated using the COCO dataset, a widely recognized benchmark in object
detection research. Experimental results highlighted the performance gains achieved by the proposed method.
Specifically, for the 10-shot setting, where only 10 labeled examples per novel class were available, the method
achieved an Average Precision (AP) score of 15.7 at a high Intersection over the Union (IoU) threshold of 0.75
(AP75). The performance of the proposed methodology shows 18.8% relative improvement over the previous
state-of-the-art method, demonstrating the effectiveness of the two-stage fine-tuning process combined with
cutout augmentation. The proposed method tries address some of the key limitations of existing FSOD ap-
proaches.
1 INTRODUCTION
Machine learning systems have made significant
progress in recent years, but training models to rec-
ognize new things with limited labeled data remains
a major challenge. Few-Shot Object Detection is a
computer vision task aimed at detecting objects in
images using only a limited amount of training data.
The objective is to train a model on a small num-
ber of examples for each object class and enable it to
identify those objects in new images. While humans,
including young children, can identify new objects
with minimal guidance, achieving this level of gen-
a
https://orcid.org/0009-0004-0747-6455
b
https://orcid.org/0009-0006-3160-428X
c
https://orcid.org/0009-0006-6931-2952
d
https://orcid.org/0009-0002-3802-1256
eralization in machines is complex. Few-Shot Learn-
ing (FSL)(Parnami and Lee, 2022) aims to solve this
problem by enabling models to generalize from only
a few examples. While FSL has shown good results
in image classification, applying it to object detection
is more difficult due to the need not just to identify
object types but also to locate them within images.
Recent approaches to FSOD have often combined
meta-learning techniques with existing object detec-
tion frameworks, such as in Meta Region Based Con-
volutional Neural Networks (R-CNN) (Yan et al.,
2019). However, comparing these methods can be
challenging, as different studies use different evalu-
ation criteria, making it difficult to determine which
approach is better. Another notable approach, FS-
DetView (Fan et al., 2020), incorporates advanced
feature alignment techniques to improve detection ac-
238
M. Badachi, V., Inamadar, S. P., Vaddo, F., B. V., S. S., Kulkarni, U. and Hegde, S.
Few-Shot Object Detection Using Two Stage Fine Tuning Approach with Data Augmentation.
DOI: 10.5220/0013613000004664
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 3rd International Conference on Futuristic Technology (INCOFT 2025) - Volume 3, pages 238-246
ISBN: 978-989-758-763-4
Proceedings Copyright © 2025 by SCITEPRESS – Science and Technology Publications, Lda.
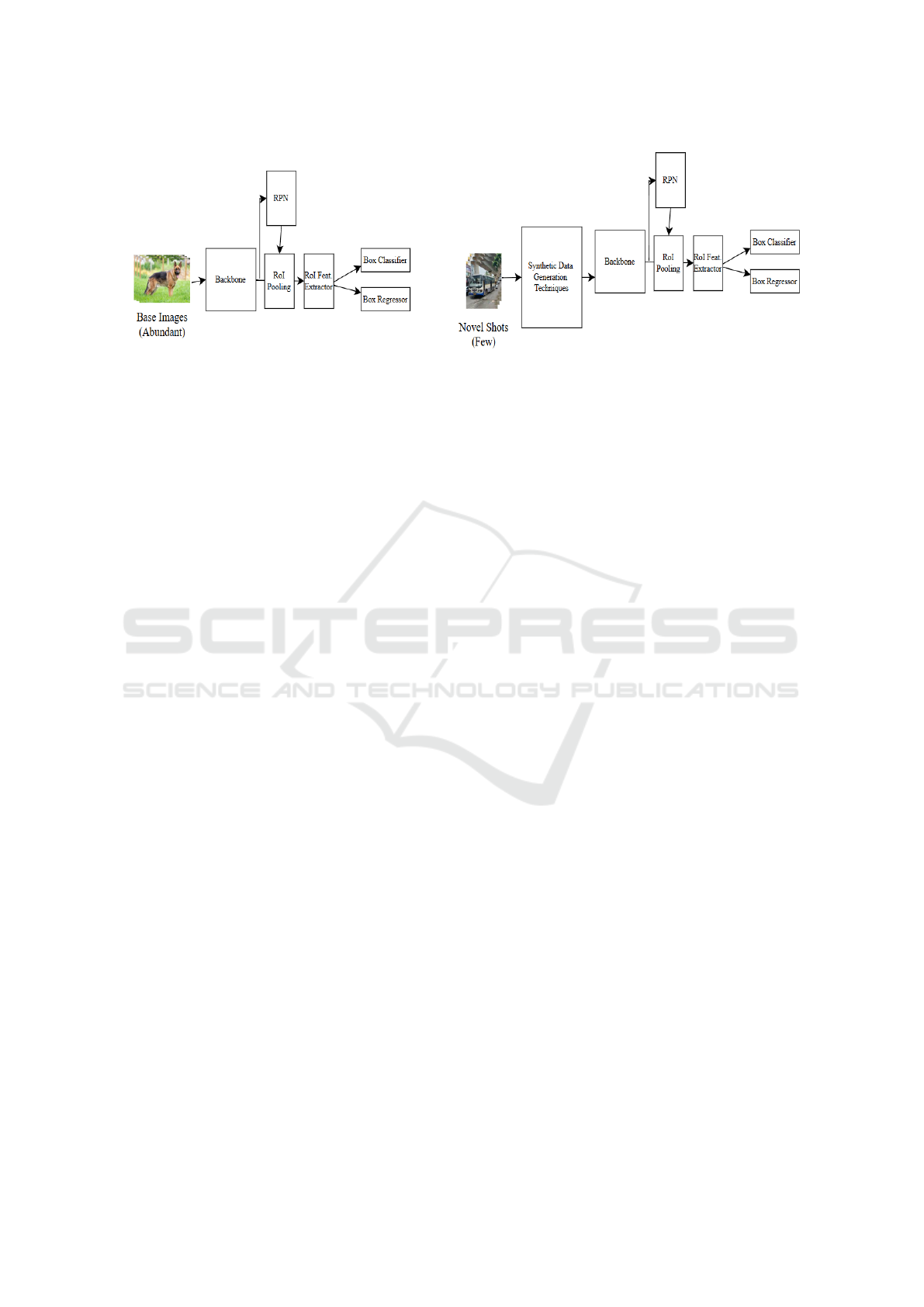
Figure 1: Workflow of proposed methodology: Normal training of base class images in stage 1 continued with training of
novel classes with data augmentation and learning of feature extractor frozen in stage 2.
curacy in data-scarce scenarios. Building on the prior
fine-tuning-based approach proposed in the Frustrat-
ingly Simple ’Few-Shot Object Detection’ (Wang
et al., 2020), the paper proposes a FSOD method that
incorporates advanced data augmentation during the
fine-tuning phase. Data augmentation, which involves
creating modified versions of existing images through
techniques like flipping, cropping, and adding noise
(Cubuk et al., 2019), effectively expands the training
set. This helps the model learn to recognize objects
with variations in appearance, lighting, and position-
ing, which in turn improves detection and localization
capabilities for new object classes.
The approach consists of two stages: first, training
an object detection model (e.g., Detectron2 (Y et al.,
2019)) on data-rich base classes, and second, fine-
tuning the model on data-scarce novel classes using
data augmentation. The flow of method is provided
in Fig 1. This approach improves the model’s abil-
ity to generalize to unseen classes while maintaining
important features learned in the first stage.
The approach is tested with MS COCO dataset us-
ing 80 base classes for backbone training. The model
showed an AP score improvement, specifically for
the 10 shot setting. The approach achieved an AP
score of 15.7 at a high IoU threshold of 0.75 (AP75).
The performance of the proposed methodology shows
18.8% relative improvement over the previous state-
of-the-art method showcasing the robustness of the
two-stage fine-tuning process combined with cutout
augmentation.
The structure of the paper is as follows. Section
2 is the background study, including an overview of
FSOD research, its impact and a brief discussion on
the object detection model, Detectron2. Section 3
provides a description detailing the two-stage fine-
tuning process and emphasizes the role of data aug-
mentation. Section 4 presents the results obtained.
The final section offers conclusions and areas of im-
provement.
2 BACKGROUND STUDY
FSOD aims to detect objects belonging to novel
classes using only a few labeled examples, a prob-
lem of increasing relevance in real-world scenarios
where labeled data for every class is scarce or expen-
sive to obtain. This challenge blends the tasks of ob-
ject detection and few-shot learning, requiring models
to not only generalize effectively to unseen classes but
also maintain performance on previously seen classes.
Traditional object detection models, such as Faster
RCNN(Ren et al., 2016) and YOLO(Liu et al., 2018),
excel when trained on large, labeled datasets. These
models rely on the availability of data to learn features
for classifying and locating objects. However, acquir-
ing such datasets for every object class is infeasible
in many practical situations, especially for rare cat-
egories. FSOD addresses this limitation by learning
from a large dataset of base classes and transferring it
to detect novel classes with minimal labeled data.
A typical FSOD framework follows a two-stage
approach(Wang et al., 2020). The first stage involves
training a model with a large dataset of base classes
to generalize features. This involves both the fea-
ture extractor and box predictor using a combined loss
function that helps the model classify and localize.
The objective is to extract strong, transferable features
while achieving high detection performance on base
classes. The second stage involves the fine-tuning
process of the trained model using a balanced dataset
that includes both base and novel classes. During this
stage, the backbone often remains frozen to preserve
knowledge from the base classes, while the classifi-
cation layers or the box predictor are fine-tuned. The
Few-Shot Object Detection Using Two Stage Fine Tuning Approach with Data Augmentation
239

inclusion of the novel classes helps the model adapt to
new categories while retaining base class knowledge.
However, FSOD faces several challenges that
make it distinct from other conventional object detec-
tion methods. The limited label data is often insuffi-
cient to represent the diversity of the class, leading to
overfitting and poor generalization or models trained
on base classes may struggle to recognize novel ob-
jects, as their features are predominantly tuned for
base categories. Another challenge faced by FSOD is
that the objects in real-world scenarios often vary in
size, appearance and context, which requires a robust
feature extraction ability.
The key methodologies are broadly categorized
into three approaches which are described in the sub-
sections A,B and C.
2.1 Data-Oriented Approaches
Data-oriented approaches(Lin et al., 2023) mitigate
the data scarcity problem by generating or augment-
ing training samples. Models like Stable Diffu-
sion(Jian et al., 2023) create synthetic images by vary-
ing input text prompts, introducing diversity into the
dataset. Techniques such as spatial transformations
(rotation, scaling, flipping) and context-aware aug-
mentations help simulate the variability often absent
in small datasets.
2.2 Model-Oriented Approaches
Model-oriented approaches (Guan et al., 2024) and
(Han and Lim, 2024) deal with modifying object de-
tection frameworks to enhance their ability to gen-
eralize to novel classes. Methods such as Con-
sine Similarity-Based Classifiers(Rezaeianaran et al.,
2021) replace traditional fully connected layers to
reduce intra-class variations and improve the gen-
eralization of unseen classes. Components like the
Local Feature Enhancement Module (LFEM)(Liu
et al., 2023a) and Global Cross-Attention Network
(GCAN)(Hou et al., 2019) improve feature extraction
by focusing on critical local features and incorporat-
ing contextual information. Attention-based networks
and class-specific prototypes are used to better dif-
ferentiate between base and novel classes in feature
space.
2.3 Algorithm-Oriented Approaches
Algorithm-oriented approaches(Liu et al., 2023b) re-
fine the training process to improve adaptation and
retention. Techniques such as meta-learning, con-
trastive learning and incremental learning help in
adapting to new classes by aligning features of similar
classes and separating dissimilar ones while retaining
the knowledge of base classes.
Recent FSOD advancements include Meta-
Detection Heads (Han and Lim, 2024) which
incorporate losses which help enhance detection
accuracy by focusing on prediction errors. Multiscale
Feature Extraction(Wang et al., 2022) addresses the
challenge of detecting objects in multiple resolutions.
Meanwhile, Synthetic Instance Augmentation(Lin
et al., 2023) focuses on improving the training data to
increase diversity and strengthen the novel instances.
Together these approaches improve FSOD.
In the following sections, we will combine dif-
ferent types of approaches and components such
as data augmentation, algorithm-oriented approaches
and Detectron2 architecture to improve FSOD.
2.4 Detectron2 Architecture Description
Detectron2, created by Facebook AI Research
(FAIR), is an advanced and flexible framework for
computer vision tasks like object detection, instance
segmentation, and key point detection. Based on
components used in earlier work like Mask R-
CNN(He et al., 2017) and Faster R-CNN(Ren et al.,
2016). Built on PyTorch, it provides modules of com-
ponents and a user-friendly system, making it easy for
researchers and developers to customize and experi-
ment with computer vision models. The components
of the model are Backbone, Regional Proposal Net-
works, ROI Heads and Detection Heads.
The working and structure of each of these com-
ponents is given below:
2.4.1 Backbone
The backbone is the part of the architecture responsi-
ble for extracting features from input images. Detec-
tron2 (Y et al., 2019) supports well-known backbones
such as ResNet and ResNeXt (He et al., 2016). These
models process the input image and produce hierar-
chical feature maps that represent the image at differ-
ent levels of detail. To enhance its ability to detect ob-
jects of various sizes, the framework integrates a Fea-
ture Pyramid Network (FPN) (Lin et al., 2017) with
the backbone. The FPN combines feature maps from
different layers, ensuring the model captures both fine
details (for small objects) and broader patterns (for
larger objects).
2.4.2 Regional Proposal Network
The Regional Proposal Network[RPN] (He et al.,
2016) is a key component of Detectron2, tasked with
INCOFT 2025 - International Conference on Futuristic Technology
240

identifying regions in an image that are likely to con-
tain objects. It works by sliding over the feature
maps from the backbone and predicting the object-
ness scores which are the likelihood that a region con-
tains an object and anchor boxes which are predefined
bounding boxes of various shapes and sizes to provide
rough object locations.
The RPN helps narrow down the search space by
proposing a manageable number of regions, making
the detection process more efficient.
2.4.3 ROI Heads
The Region of Interest (ROI) heads refine the regions
proposed by providing likelihood of an object being
present and rough object locations. ROI Heads and
Pooling were introduced with Fast R-CNN (Ren et al.,
2016). These heads extract features from the pro-
posed regions using ROI Align, a method that ensures
accurate spatial alignment of features. The key com-
ponent of ROI heads is, Bounding Box Head, this
head fine-tunes the location of the proposed regions
and assigns them a class label.
2.4.4 Detection Heads
The detection heads finalize predictions based on the
features processed by the ROI heads by predicting ob-
ject classes and refined object boundaries. The out-
puts include, object classes which are probabilities of
the detected objects belonging to specific categories
and bounding boxes are refined coordinates for the
object’s locations. These outputs enable Detectron2
to perform accurate object detection. In the following
section, we shall explain the proposed methodology
in detail and validate the methodology using dataset.
3 PROPOSED METHODOLOGY
This section explains the proposed methodology
for FSOD. The method divides the training mainly
into two stages, namely Backbone Training (stage 1)
and Fine Tuning (stage 2). In Stage 1 normal train-
ing for images takes place in Detectron2. Stage 2 will
have a sub-stage of data augmentation before an im-
age enters the learning architecture and then by freez-
ing the learning of Backbone i.e. the ResNet-based
feature extractor an input of the augmented rare class
images for training is given.
3.1 Backbone Training (Stage 1)
In Backbone training stage, the learning begins with
inputting a set of training images I into a backbone
network, typically a deep convolutional neural net-
work such as ResNet(He et al., 2016).
Algorithm 1: Backbone for Feature Extraction.
Data: Input Image I ∈ R
H×W ×3
Result: Multi-scale feature maps
{P
2
, P
3
, P
4
, P
5
}
Stage 1: Initial Convolution and Pooling
f
1
(I) =
MaxPool3x3(ReLU (BatchNorm(Conv3x3(I))))
Stage 2 to 5: Residual Blocks
for each stage i ∈ {2, 3, 4, 5} do
f
i
(X) = ResBlock
1
(X) →
ResBlock
2
(X) → · ·· → ResBlock
n
i
(X)
for each residual block ResBlock(X) do
ResBlock(X) = X +
Conv3x3(ReLU (BatchNorm (Conv3x3(X ))))
if stage i ∈ {3, 4, 5} then
X (downsampled) =
Conv1x1(X) with stride 2
Stage Outputs:
C
2
= f
2
( f
1
(I))
C
3
= f
3
(C
2
)
C
4
= f
4
(C
3
)
C
5
= f
5
(C
4
)
Feature Pyramid Network (FPN) with
ResNet:
C
2
← f
2
( f
1
(I))
C
3
← f
3
(C
2
)
C
4
← f
4
(C
3
)
C
5
← f
5
(C
4
)
Top-Down Pathway:
P
5
← g
1
(C
5
) // g
1
represents a 1 × 1
convolution layer
P
4
← g
1
(C
4
) + Upsample(P
5
)
P
3
← g
1
(C
3
) + Upsample(P
4
)
P
2
← g
1
(C
2
) + Upsample(P
3
)
Feature Smoothing:
for each P
i
∈ {P
2
, P
3
, P
4
, P
5
} do
P
i
← g
3
(P
i
)
return {P
2
, P
3
, P
4
, P
5
}
The backbone network processes each image and
outputs multi-scale feature maps F. These feature
maps are representations F(x,y) capturing pixel-level
relationships and visual semantics across different
layers. The feature extraction step can be mathemati-
cally represented as:
F = Backbone(I) (1)
The algorithm for working of backbone referred
in Equation 1 is provided in Algorithm 1. The fea-
Few-Shot Object Detection Using Two Stage Fine Tuning Approach with Data Augmentation
241
ture maps F are then fed into a Region Proposal Net-
work (RPN), which predicts regions likely to contain
objects. The RPN slides a small convolutional win-
dow over F and generates anchor boxes at each posi-
tion. For each anchor, the RPN outputs two key el-
ements: objectness score s(a) and bounding box re-
gression offsets t(a) that refine the anchor a, refer Al-
gorithm 2. This can be formalized as shown in Equa-
tion 2:
s(a), t(a) = RPN(F) (2)
Algorithm 2: Region Proposal Network (RPN) for Object
Detection.
Data: Input feature maps F from an
intermediate layer of the network
Result: Region proposals with associated
objectness scores
Step 1: Convolutional Layers
X
1
← Conv3x3(F)
X
2
← Conv1x1(X
1
)
X
3
← Conv1x1(X
1
)
Step 2: Region Proposals
t(a) ← Bounding box proposals from X
2
s(a) ← Objectness scores from X
3
Step 3: Output Region Proposals
return s(a), t(a)
Next, the generated proposals are passed through
an ROI Pooling layer, which standardizes variable-
sized ROIs into fixed-size feature maps. Opertaions
of ROI are provided in Equation 3 and this oper-
ation ensures that the input to the next layers re-
mains uniform. If an ROI is defined by coordinates
(x
1
, y
1
, x
2
, y
2
) the ROI Pooling layer partitions it into
equal-sized bins and applies max pooling within each
bin to create a fixed-size output, mathematically rep-
resented as:
ROI Pool(F(x
1
: x
2
, y
1
: y
2
)) → fixed-size feature map
(3)
These pooled features are processed by the ROI
feature extractor R
feat
referred in Equation 4 and
Equation 5, which further refines them to enhance
their differentiability capacity:
f
ROI
= R
f eat
(ROI Pool(F, R)) (4)
p(c | f
ROI
) = softmax(W
c
f
ROI
+ b
c
) (5)
The output features f
ROI
in Algorithm 3 are split
and fed into two branches: a box classifier and a box
Algorithm 3: ROI Feature Extractor.
Data: Input feature maps F from the
convolutional layers of the network
Data: Region proposals R
1
from the RPN,
which are the proposed bounding boxes
Result: Extracted ROI features
Step 1: ROI Pooling
ROIs ← ROIPool(F, R
1
)
Step 2: Feature Aggregation
F
ROI
← Flatten(ROIs)
Step 3: Fully Connected Layer
F
FC
← FullyConnected(F
ROI
)
Step 4: Output ROI Features
return F
FC
regressor. The box classifier uses a softmax function
to predict the class probabilities p(c | f
ROI
) for each
class c, given the feature f
ROI
. The box regressor pre-
dicts bounding box adjustments ∆x, ∆y, ∆w, ∆h to re-
fine the proposal coordinates, provided in Equation 6.
Bounding Box = (x, y, w, h) + (∆x, ∆y, ∆w, ∆h) (6)
This mathematical workflow supports precise de-
tection by identifying and classifying ROIs while re-
fining their spatial boundaries, laying the foundation
for subsequent training and optimization.
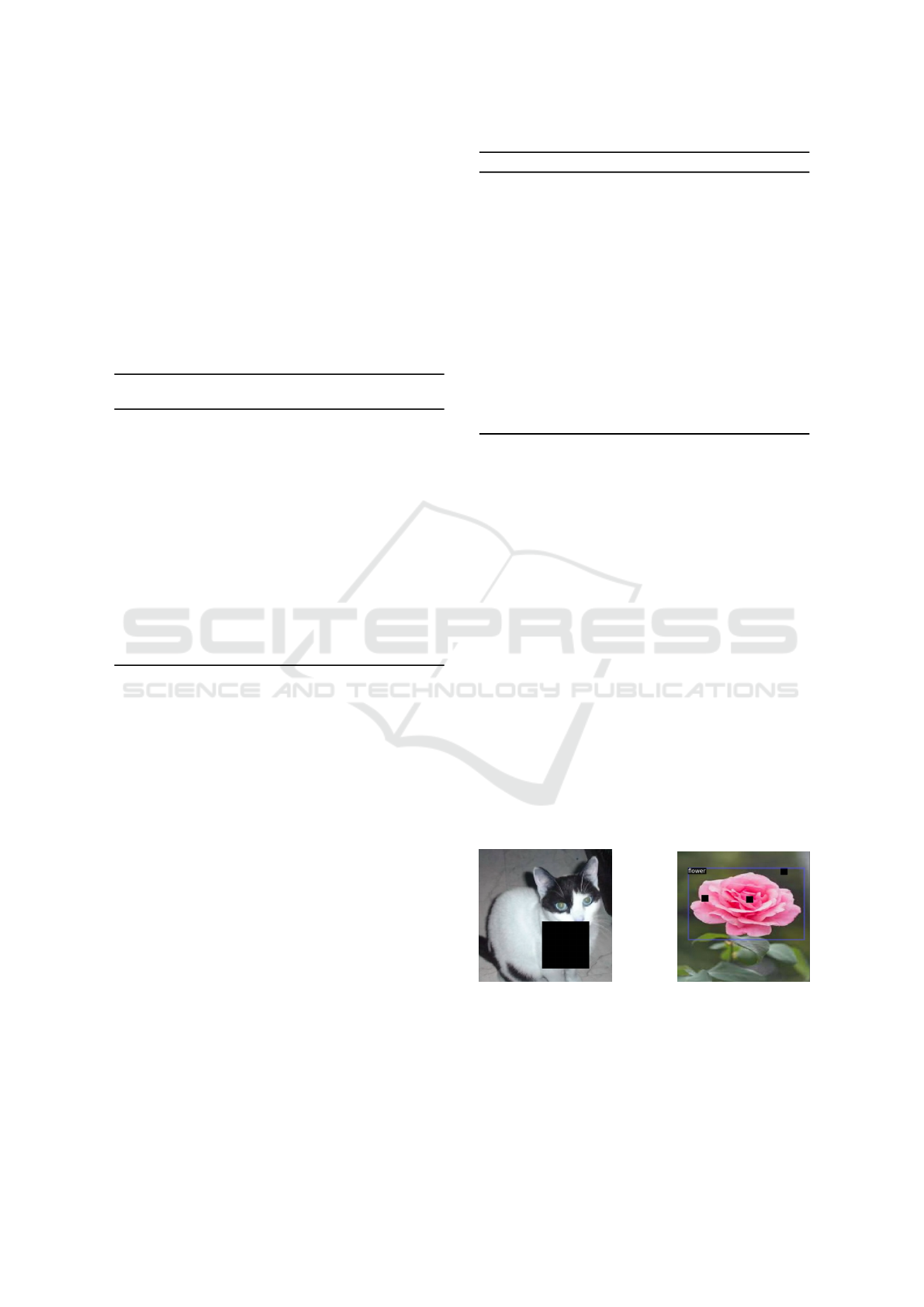
3.2 Data Augmentation (Cutout)
Cutout (DeVries, 2017) is a simple augmentation
method used to overcome challenges such as over fit-
ting and limited data diversity. Images after augmen-
tation look like the images in Fig 2. The technique
works in the following way:
(a) Cat (b) Flower
Figure 2: Images of cat and flower after applying cutout.
Sampling an Image: Select an images, x, from
the dataset with its corresponding label, y.
Cutting a Random Patch: A rectangular region
R is randomly selected within x . The size and posi-
tion of R are determined by sampling its coordinates
INCOFT 2025 - International Conference on Futuristic Technology
242

(r
x
, r
y
, r
w
, r
h
), where r
x
and r
y
are the top-left corner,
and r
w
and r
h
are the width and height of the patch.
Masking the Region: Replace the pixel values
within R with a constant value, such as black (0), to
create the augmented image x
cutout
refer Equation 7.
x
mix
(i, j) =
(
0, if (i, j) ∈ R
x(i, j), otherwise
(7)
Training: Train the model using the augmented
images and their original labels. The objective func-
tion, such as cross-entropy, is computed based on the
original label, y.
Algorithm 4: Cutout Data Augmentation.
Data: Dataset D = {(x
i
, y
i
)}, where x
i
is the
image and y
i
is the label
Data: Patch size range:
(min width, max width),
(min height, max height)
Data: Image dimensions: W, H
Data: Constant fill value F (e.g., 0 for black
or mean pixel value)
Result: Augmented dataset D
cutout
Initialize empty dataset D
cutout
← {}
foreach (x, y) ∈ D do
Randomly sample patch dimensions:
r
w
← Uniform(min width, max width)
r
h
← Uniform(min height, max height)
Randomly select patch position:
r
x
← Uniform(0, W − r
w
)
r
y
← Uniform(0, H − r
h
)
Create a copy of the image:
x
cutout
← x
Mask the region R with fill value F:
for i ← r
y
to r
y
+ r
h
do
for j ← r
x
to r
x
+ r
w
do
x
cutout
[i, j] ← F
Add the augmented sample to the dataset:
D
cutout
← D
cutout
∪ {(x
cutout
, y)}
return D
cutout
Working of cutout is provided in Algorithm 4.
Cutout enhances the model by forcing it to focus on
incomplete regions of the image, encouraging it to ex-
tract meaningful features from the remaining visible
parts. This technique is particularly effective in im-
proving generalization, as it reduces the dependency
on specific features and makes the model less prone
to over fitting.
3.3 Fine Tuning Stage 2
The second stage of a two-stage few-shot object de-
tection process, known as few-shot fine-tuning. In
this stage, a small number of labeled examples, called
novel shots, are enhanced using the Cutout augmen-
tation technique. Cutout creates new training samples
by cutting regions from an image and making them
sparse, while keeping the label same. This helps the
model learn better by exposing it to more diverse ex-
amples, even with limited data.
The augmented images are processed by a pre-
trained backbone network, which extracts important
features. A RPN identifies potential object regions,
and these are refined using ROI pooling. It is im-
portant to note that the training of backbone, RPN
and ROI heads is frozen during this stage. The only
trainable components are Box Regressor and Box
Classifier. The pooled features are then sent to two
branches: one for classifying objects and the other
for predicting bounding boxes. By using Cutout, this
stage improves the model’s ability to detect novel ob-
jects effectively, even with very few training exam-
ples. The proposed architecture can be referred from
Fig 3.
In the following section we will discuss about the
results achieved through our proposed method.
4 RESULTS AND DISCUSSION
The following section discusses the experimental
setup, validates the proposed architecture, and details
the benchmark dataset used for the experiments.
4.1 Dataset Description
The dataset used is MS COCO (Microsoft Common
Objects in Context) dataset (Lin et al., 2014). The
dataset is a large collection of images used for com-
puter vision tasks like object detection, segmentation,
and captioning. It has over 330,000 images and 2.5
million labeled objects in 80 categories. COCO is
known for images with multiple objects in real-world
settings, making it great for training and testing vision
models. It also includes data for tasks like pose esti-
mation and scene segmentation. The dataset is widely
used in research and competitions to benchmark the
performance of models.
4.2 Experimental Details
In this section, we compare the existing FSOD bench-
marks using the COCO dataset. The results demon-
Few-Shot Object Detection Using Two Stage Fine Tuning Approach with Data Augmentation
243
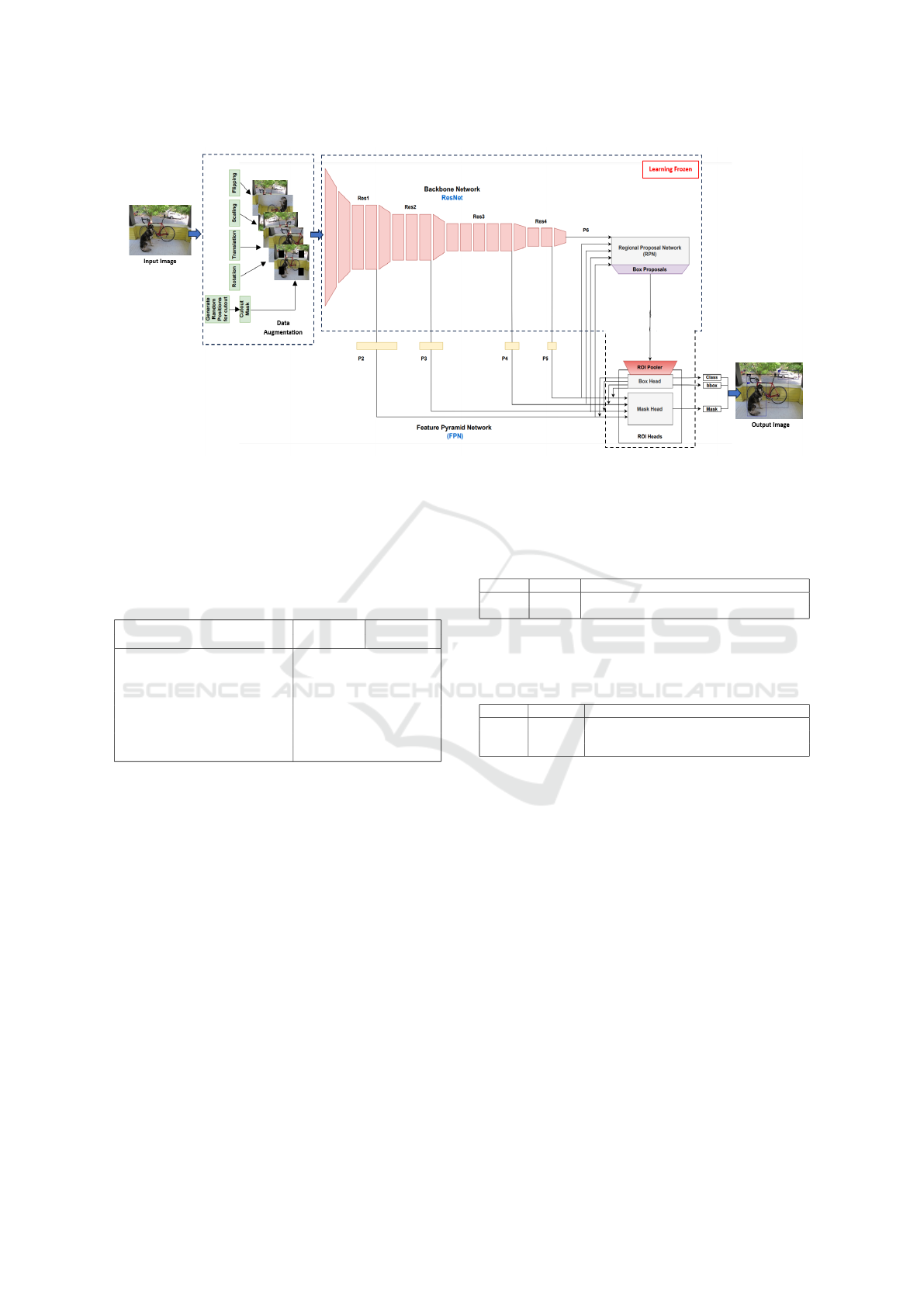
Figure 3: Detectron2 architecture for stage-II with frozen backbone and a new module consisting of different data augmenta-
tion techniques.
strate the ability of the approach to overcome the chal-
lenges of FSOD, including data scarcity and class
generalization.
Table 1: Comparison of novel AP and novel AP75 for dif-
ferent methods.
Model Novel AP Novel AP75
10 30 10 30
FSRW (Kang et al., 2019) 5.6 9.1 4.6 7.6
MetaDet (Wang et al., 2019) 7.1 11.3 6.1 8.1
FRCN+ft+full (Yan et al., 2019) 6.5 11.1 5.9 10.3
Meta R-CNN (Yan et al., 2019) 8.7 12.4 6.6 10.8
FRCN+ft-full (Wang et al., 2020) 9.2 12.5 9.2 12.0
TFA w/ fc (Wang et al., 2020) 10.0 13.4 9.2 13.2
TFA w/ cos (Wang et al., 2020) 10.0 13.7 13.2 13.5
TFA w/ aug (ours) 14.9 17.2 15.7 17.3
This section presents a detailed analysis of the re-
sults obtained from our proposed method for FSOD
on the COCO dataset in table 1. Providing a compari-
son between the proposed approach with state-of-the-
art methods, quantifying the improvements achieved
in both Novel Average Precision (AP) and Novel AP
at IoU 75% (AP75). The results show substantial
improvements, especially in the detection of novel
classes with limited data.
Results obtained demonstrate that TFA w/ aug
(ours) provides consistent improvements in detecting
novel classes across all shot levels, with the largest
improvement at the 10-shot setting (50% improve-
ment in Novel AP).
From table 2, it is clear that the Novel AP for
Novel Initialization is 14.8, which is 49% higher
than Random Initialization (9.9). The results con-
firm that Novel Initialization significantly improves
the model’s ability to detect novel classes, particularly
Table 2: Comparison of Base and Novel AP across dif-
ferent initialization strategies. The table shows the per-
formance for both random and novel initialization for the
COCO dataset at different shot levels.
Dataset Init. Novel AP (1) Novel AP (3) Novel AP (10)
COCO Random 3.8 6.7 9.9
Novel 4.1 7.1 14.8
at high shot levels.
Table 3: The table shows the effect of varying the scaling
factor (10, 20, 50) on novel AP across different shot levels.
Dataset Scale(%) Novel AP (1) Novel AP (3) Novel AP (10)
COCO 10 2.8 3.4 4.7
20 3.4 6.6 10.0
50 2.4 5.4 9.0
The results from table 3 demonstrate that increas-
ing the scaling factor from 10 to 20 improves the per-
formance, while excessively increasing it to 50 leads
to a decline.
The proposed method outperforms existing state-
of-the-art methods for FSOD, with significant im-
provements in detecting novel classes across various
shot levels. In particular, data augmentation and opti-
mal initialization strategies are crucial for improving
the model’s ability to generalize to novel classes, as
shown by the percentage improvements in Novel AP.
These results demonstrate the effectiveness of our ap-
proach in addressing the challenges of FSOD, espe-
cially in scenarios with limited labeled data.
Fig. 4 showcases the ability of our method to de-
tect and locate objects with high precision and mini-
mal deviation. The result demonstrates that the model
can handle different object sizes, orientations and
complexities, achieving precise bounding boxes. This
INCOFT 2025 - International Conference on Futuristic Technology
244

Figure 4: The above images show the results of the detection of novel classes.
indicates that the model is capable of generalizing
novel classes with limited training data.
5 CONCLUSION AND FUTURE
SCOPE
The goal of this paper was to achieve object de-
tection for novel classes of objects. Object detec-
tion is done using the Detectron2 module. The two-
stage training helps the model to generalize better
and image augmentation to the second layer makes
the model identify objects even if they are differ-
entiable.From the results achieved, it is evident that
this technique performs better than the existing FSOD
methods. There is an improvement of 18.8% in
AP(75) score in the 10-shot setting, the model also
showed a 49% improvement in AP score in the 10-
shot setting. This proves that the current state-of-the-
art scores have been surpassed by a decent margin.
Furthermore, improvements can be made in image
augmentation techniques so that the model can easily
grasp every minute detail. Also, techniques like local
feature extraction can be added so to retrieve just the
important features from the image which would result
in better classification.
REFERENCES
Cubuk, E. D., Zoph, B., Mane, D., Vasudevan, V., and Le,
Q. V. (2019). Autoaugment: Learning augmentation
strategies from data. In Proceedings of the IEEE/CVF
conference on computer vision and pattern recogni-
tion, pages 113–123.
DeVries, T. (2017). Improved regularization of convolu-
tional neural networks with cutout. arXiv preprint
arXiv:1708.04552.
Fan, Q., Zhuo, W., Tang, C.-K., and Tai, Y.-W. (2020). Few-
shot object detection with attention-rpn and multi-
relation detector. In Proceedings of the IEEE/CVF
conference on computer vision and pattern recogni-
tion, pages 4013–4022.
Guan, W., Yang, Z., Wu, X., Chen, L., Huang, F., He, X.,
and Chen, H. (2024). Efficient meta-learning enabled
lightweight multiscale few-shot object detection in re-
mote sensing images.
Han, G. and Lim, S.-N. (2024). Few-shot object detec-
tion with foundation models. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 28608–28618.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hou, R., Chang, H., MA, B., Shan, S., and Chen, X.
(2019). Cross attention network for few-shot classi-
fication. In Wallach, H., Larochelle, H., Beygelzimer,
A., d'Alch
´
e-Buc, F., Fox, E., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 32. Curran Associates, Inc.
Jian, Y., Yu, F., Singh, S., and Stamoulis, D. (2023). Stable
diffusion for aerial object detection.
Kang, B., Liu, Z., Wang, X., Yu, F., Feng, J., and Dar-
rell, T. (2019). Few-shot object detection via feature
reweighting. In Proceedings of the IEEE/CVF Inter-
national Conference on Computer Vision (ICCV).
Lin, S., Wang, K., Zeng, X., and Zhao, R. (2023). Explore
the power of synthetic data on few-shot object detec-
tion. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR)
Workshops, pages 638–647.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Few-Shot Object Detection Using Two Stage Fine Tuning Approach with Data Augmentation
245

Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Com-
puter Vision–ECCV 2014: 13th European Confer-
ence, Zurich, Switzerland, September 6-12, 2014, Pro-
ceedings, Part V 13, pages 740–755. Springer.
Liu, C., Tao, Y., Liang, J., Li, K., and Chen, Y. (2018). Ob-
ject detection based on yolo network. In 2018 IEEE
4th Information Technology and Mechatronics Engi-
neering Conference (ITOEC), pages 799–803.
Liu, D., Xie, B., Zhang, J., and Ding, R. (2023a). An ex-
tremely lightweight change detection algorithm based
on light global-local feature enhancement module.
IEEE Geoscience and Remote Sensing Letters, 20:1–
5.
Liu, T., Zhang, L., Wang, Y., Guan, J., Fu, Y., Zhao, J., and
Zhou, S. (2023b). Recent few-shot object detection
algorithms: A survey with performance comparison.
ACM Trans. Intell. Syst. Technol., 14(4).
Parnami, A. and Lee, M. (2022). Learning from few exam-
ples: A summary of approaches to few-shot learning.
Ren, S., He, K., Girshick, R., and Sun, J. (2016). Faster
r-cnn: Towards real-time object detection with re-
gion proposal networks. IEEE transactions on pattern
analysis and machine intelligence, 39(6):1137–1149.
Rezaeianaran, F., Shetty, R., Aljundi, R., Reino, D. O.,
Zhang, S., and Schiele, B. (2021). Seeking similar-
ities over differences: Similarity-based domain align-
ment for adaptive object detection. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision (ICCV), pages 9204–9213.
Wang, X., Huang, T. E., Darrell, T., Gonzalez, J. E., and
Yu, F. (2020). Frustratingly simple few-shot object
detection. arXiv preprint arXiv:2003.06957.
Wang, Y.-X., Ramanan, D., and Hebert, M. (2019). Meta-
learning to detect rare objects. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion (ICCV).
Wang, Z., Guo, J., Zhang, C., and Wang, B. (2022).
Multiscale feature enhancement network for salient
object detection in optical remote sensing images.
IEEE Transactions on Geoscience and Remote Sens-
ing, 60:1–19.
Y, W., A. Kirillov, F. Massa, W.-Y., and Girshick, R. (2019).
Facebook ai research-fair.
Yan, X., Chen, Z., Xu, A., Wang, X., Liang, X., and Lin,
L. (2019). Meta r-cnn: Towards general solver for
instance-level low-shot learning. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 9577–9586.
INCOFT 2025 - International Conference on Futuristic Technology
246
